基于迁移学习的滚动轴承剩余使用寿命预测
2024-05-28姜苗向阳魏建红
姜苗, 向阳, 魏建红
(1.武汉理工大学 船海与能源动力工程学院,湖北 武汉 430000; 2.高性能船舶技术教育部重点实验室(武汉理工大学),湖北 武汉 430000)
旋转机械在现代社会中扮演着重要角色,广泛应用于航天、交通、工业生产等行业,滚动轴承作为应用的核心部件,运行状态将直接影响旋转机械的运行状态[1]。预测与健康管理(prognostic and health management, PHM)提高了旋转机械的可靠性和安全性,剩余寿命(remaining useful life,RUL)预测作为PHM中的一项预测任务,预测了相关机械的RUL,维护机械,防止旋转机械发生故障[2]。机械RUL预测建模被分为基于数学模型和基于数据驱动2类[3]。基于数学模型根据机械设备的退化失效机制、退化失效行为进行数学建模预测其RUL[3]。实际应用中,受机械工作环境及系统复杂性等因素的影响,完整实现机械系统数学建模较为困难。而随着科学技术的发展,基于数据驱动的方法已逐步成为主流,其主要分为基于浅层机器学习的方法、基于深度学习的方法。深度学习技术也被不断深入探索挖掘,由于其自适应的提取特征能力,克服了浅层机器学习技术的固有缺陷,减少了人为干预错误,使机械维护更加智能、准确、高效,广泛应用在机械健康管理领域[4]。Babu等[5]提出的基于卷积神经网络(convolution neural network, CNN)的回归方法预测RUL将卷积神经网络用于预测RUL。Ding等[6]为提高预测模型准确性和泛化能力对CNN进行改进,提出了深度卷积神经网络(depth convolution neural network, DCNN)的网络结构预测RUL。通过3个卷积层和2个全连接层构建了没有池化层的DCNN剩余使用寿命预测模型。以上方法虽然实现了RUL的预测,但是忽略了寿命预测特征在时间上的相关性。
长期短时记忆(long short-term memory, LSTM)增加3个逻辑门对信息进行筛选,克服了传统时间序列预测建模算法循环神经网络(recurrent neural network, RNN)存在梯度消失和梯度爆炸问题。但缺点是增加了网络计算时间。门控循环单元(gated recurrent unit, GRU)合并LSTM的输入门与遗忘门,并构成更新门,减少了计算时间。Chen 等[7]提出基于温度的门控循环单元神经网络实现了锂电池健康预测。Msa等[8]提出基于GRU的网络入侵预警预测方法,根据报警历史数据对模型进行训练,实现了对未来可能入侵的报警预测。Tong等[9]根据复杂机械特征多样、内部结构复杂、时序信息耦合等特点提出一种基于GRU的网络模型预测复杂机械的RUL,通过剔除无效数据、降噪、计算特征等方法提高了复杂机械RUL的预测准确率。但是以上方法都是使用同一研究对象的寿命数据进行训练和验证,没有使用未训练工况下的数据验证模型的预测性能。经试验证明,使用某一个轴承数据训练模型的预测能力存在局限性,不适用于预测其他轴承的RUL,在预测RUL时,模型的预测性能非常不稳定,预测准确率会下降。
本文考虑轴承状态受历史状态影响,使用GRU搭建RUL预测模型。并提出使用迁移学习策略,即用未训练轴承正常阶段的特征预训练模型,使模型学习到新轴承的状态知识,然后预测轴承退化阶段的RUL,提高预测模型的准确性以及泛化能力。
1 预测特征计算
不同信号特征包含轴承不同维度的状态信息,轴承的状态信息越多,预测RUL的精确度越高。轴承信号的时域特征、频域特征以及模糊熵作可为预测模型的输入。通常采集的数据包含噪声,为减小噪声对预测精度的影响,使用五点三次平滑算法对原始数据进行预处理[10],再对处理的信号进行特征计算。
1.1 时域频域特征
振动信号时域特征包含有量纲参数和无量纲参数,无量纲参数不会随运行工况的变化而变化,反映了轴承的健康状态[11]。偏度Cw、峭度Cq、波形因子Sf、峰值因子Ip这4个预测特征分别为:
(1)
(2)
(3)
(4)

时域特征能够直观地反映轴承状态随时间变化关系,但不能提供振动信号中关键频率信息,因此本文对轴承振动信号进行了频域特征提取。重心频率fg和均方根频率fe能不同程度的反映出信号频率分布[12],2种预测特征分别为:
(5)
(6)
式中:fk为频率幅值;P(k)为对应的功率谱值。
1.2 模糊熵
熵用于度量系统或一段信息中的不确定性或混乱程度,模糊熵克服了近似熵与样本熵在计算过程中随数据波动而变化的缺点[13]。模糊熵通过均值运算,使用指数函数代替绝对幅值差,消除了基线漂移和数据波动的影响。计算过程为:

(7)
(8)

(9)
式中:i,j=1,2,…,N-m,i≠j。

(10)
式中n、r分别为边界梯度和宽度。
4)计算除自身外所有隶属度平均:
(11)
5)m=m+1,重复步骤3)、4)。
6)计算模糊熵:
KFE(t)=lnφm(t)-lnφm+1(t)
(12)
式中:N为模糊熵与数据长度;m为参数嵌入维度,取值1或2;r为相似容限,取值范围在0.1~0.5[13];n为模糊函数隶属度,通常取值为2。以上参数存在相关性,当N为1 500时,m为2,n为2,r为0.2。经过以上流程得到轴承1-1的模糊熵如图1所示。
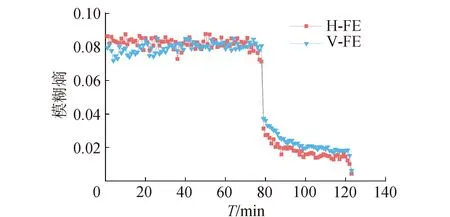
图1 轴承1-1 模糊熵
从图1水平采集振动信号模糊熵H-FE以及垂直采集振动信号模糊熵V-FE可以看出随轴承运行时间的增加,轴承的退化程度越来越严重,模糊熵值也越来越小,表明模糊熵可以直观地反映轴承的运行状态。
1.3 数据标准化
当模型的输入特征量纲不一致,会降低模型的预测性能,对特征量纲进行标准化处理可消除这一影响,再代入预测模型时对所有的预测特征进行标准化处理为:
(13)
2 轴承状态阶段划分
本文对轴承的状态进行阶段划分,利用融合的退化状态特征,结合“3σ”准则判定初始退化点。当轴承的实时退化特征超出准则值时轴承开始退化,进而划分出轴承的正常与退化阶段。轴承在正常阶段的磨损量小,运行状态稳定,RUL为常数值;进入退化阶段后RUL呈线性下降。本文以西安交通大学机械装备健康监测联合实验室的XJTU-SY数据集为数据基础,选择了该数据集2种工况下10个滚动轴承的全寿命周期振动信号,具体工况如表1所示,轴承具体的失效模式如表2所示。

表1 轴承运行工况

表2 轴承故障信息
轴承加速退化实验台架如图2所示,该实验台架由交流电动机、电动机转速控制器、转轴、支持轴承、加速度传感器、液压加载系统和测试轴承组成。交流电机用于输出转矩,以达到改变轴承运行工况的作用。液压加载系统用于轴承径向加载,以达到加速轴承退化的作用。在水平和垂直方向安装有2个加速度传感器,用于采集轴承的全寿命周期信号,其采集频率为25.6 kHz,采样间隔为1 min,每次采样时长为1.28 s。

图2 滚动轴承实验台
2.1 退化准则
“3σ”准则常用于检测数据的异常值,其计算过程为:假设数据满足正态分布,先计算出数据的标准差,再按照一定概率确定一个区间,当数据中的某个数不在这个区间内则认为该值为误差值。
本文对轴承1-1原始信号的幅值进行统计,通过Matlab正态分布函数拟合数据的分布,得到该轴承的信号振幅值分布如图3所示。

图3 轴承1-1 信号幅值概率分布
从图3可以看出,轴承1-1水平方向、垂直方向采集的全寿命信号的振幅概率分布完全满足正态分布,因此本文可以使用“3σ”准则对轴承进行初始退化点确定,步骤为:
1)根据“3σ”准则以及本文研究目标,设置退化准则。按照当前采集时间步t计算退化指标的标准差δ及均值μ为:
(14)
(15)
式中xi为时间步采集的振动信号退化指标。
2)得到每次时间步采集信号的判断阈值φ。
φ=μ+3δ
(16)
3)当xt>φ则认为该时间步为初始退化点。
2.2 退化状态特征融合
信号的峰峰值z1、绝对均值z2、方差z3、均方根值z4可以直接反映机械的状态信息[14],因此本文以上述4个时域特征为轴承的退化指标,融合公式为:
(17)
式中Zi为融合后的退化特征。
图4中H-F为水平传感器采集信号的融合特征V-F为垂直传感器采集信号的融合特征,从图中可以看出,在轴承正常阶段退化特征较小且变化平缓,当进入退化阶段退化后,退化特征值和波动较大。因此得出结论,本文计算退化特征能够较好地划分出轴承正常阶段和退化阶段。
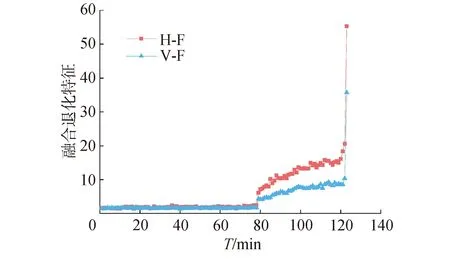
图4 轴承1-1的融合退化特征
2.3 退化阶段划分实例
利用2.1节的退化准则确定轴承的退化点,图5为使用融合退化特征确定轴承1-1,轴承2-1的初始退化点。从图5的分割线可以看出,本文划分的初始退化点对应轴承全寿命周期信号时域信号振幅突变区间,划分的退化阶段符合轴承的实际状态。因此可以使用本文的退化准则划分轴承的不同阶段。

图5 轴承的初始退化点
3 剩余使用寿命预测
RNN具有较强的处理时间序列能力,但是该网络在反向传播过程中会丢失先前记录的状态信息,同时还存在梯度消失或爆炸的问题,LSTM、GRU可解决RNN不适合用于处理长期依赖问题[15]。
3.1 门控循环单元
GRU网络通过合并输入门与遗忘门的单元状态和隐藏状态,构成了更新门[16]。GRU包括重置门和更新门2个逻辑门,其结构如图6所示。
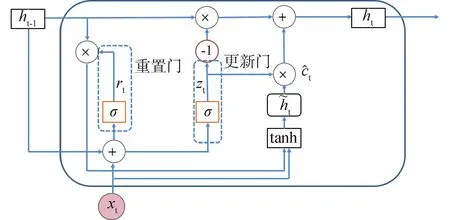
图6 GRU单元框架

zt=σ(Wz·[ht-1,xt]+bz)
(18)
rt=σ(Wr·[ht-1,xt]+br)
(19)
(20)
(21)
yt=∂(Wohh+bo)
(22)

3.2 迁移学习
迁移学习是将学到的已有知识应用到新的领域,它不同于常规机器学习的假设1(学习样本与测试样本满足独立分布),假设2(使用足够多的训练样本才能获得足够好的学习能力)[17]。迁移学习可以解决目标领域标签样本少,模型训练时间长,模型泛化能力低的问题。常见的迁移学习分为:基于核学习、基于强化学习、基于流行学以及、基于深度学习的迁移学习。
迁移学习中,一个领域D为:
D=γp(x)
(23)
式中:γ表示特征空间;p(x)为X={x1,x2,…,xn}∈γ;xi∈Rd,i=1,2,…,n的边缘分布。

Γs=Yf(·)
(24)

本文根据迁移学习原理,提出使用某一工况下某一轴承的全寿命周期特征训练建立的RUL预测模型,结合迁移学习使用其他未训练轴承的全寿命数据作为验证集,先使用轴承正常阶段数据对训练好的模型进行预训练,然后对轴承的退化阶段进行RUL预测。
为实现滚动轴承的RUL预测,本文构建了如图7的网络框架。
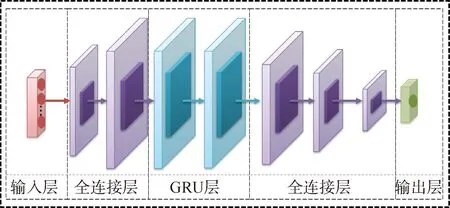
图7 预测模型框架
3.3 诊断框架
本文设计的整体预测框架如图8所示。首先选择轴承1-1的全寿命周期数据作为训练样本,计算其时域特征、频域特征以及模糊熵作为模型输入,再设置模型参数训练并保存模型,最后计算其他轴承全寿命周期数据的预测特征。结合迁移学习,用正常阶段特征数据对模型进行预训练,使模型学习到新的轴承状态知识,以实现新轴承退化阶段RUL的准确预测。
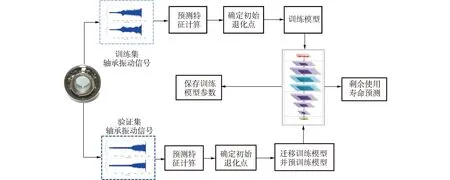
图8 轴承RUL的预测框架
3.4 预测实例
为准确预测出滚动轴承的RUL,经过多次调试模型,最终得到模型的超参数如表3所示。
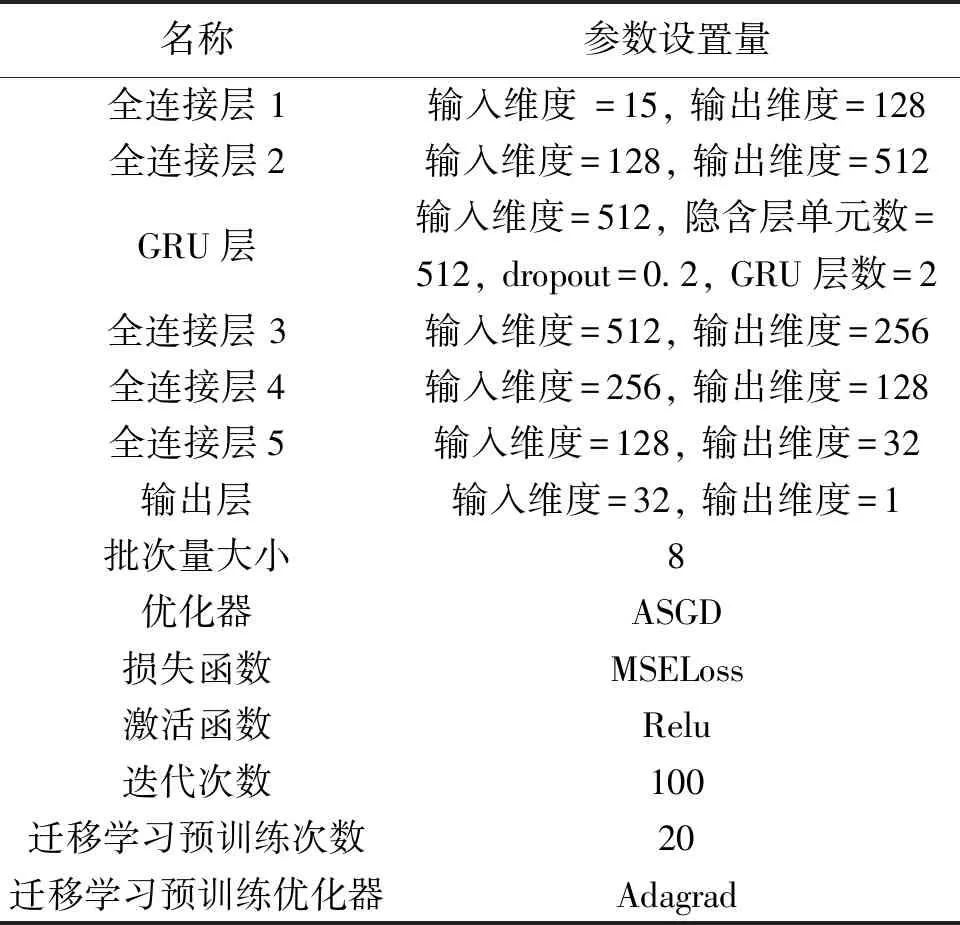
表3 GRU预测模型的超参数设置
首先为验证GRU在计算时间上优于LSTM,建立了除记忆层不同其他结构层都相同的预测模型。使用预测评价指标,如均方根误差(root mean square error, RMSE)、积累相对准确度(cumulative relative accuracy, CRA)以及百分比误差(mean absolute error, MAE)评价预测的结果[18-19]。预测指标RMSE与MAE值越小说明预测RUL的误差越小,更加吻合轴承的真实RUL,该值越小其预测精度越好。CRA越大说明预测轴承的RUL越接近真实值。CRA为0.92,其余得到2种预测模型的结果如表4所示。

表4 训练模型评价指标
从表4以及图9可以看出,使用相同结构网络搭建的GRU和LSTM预测模型,在训练预测精准度以及训练评价指标值上都非常接近,2种方法得到的预测结果与轴承真实RUL也极其吻合,但是GRU模型的训练时间优于LSTM模型,因此选择GRU建立轴承RUL预测模型。同时为验证GRU层数对预测结果的影响,设置了3组实验,每组实验中除GRU层数不同,其他的网络结构参数均相同。选择轴承1-1的全寿命周期特征数据作为训练数据训练模型,得到3组训练结果如表5所示。
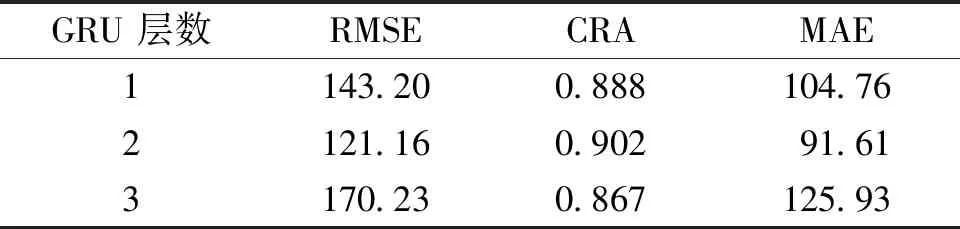
表5 优化GRU层数评价指标
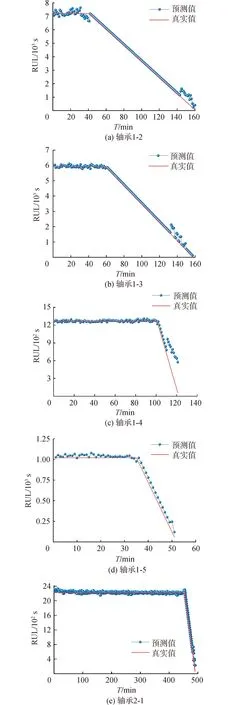
图9 迁移学习预测轴承的RUL结果
根据表5预测指标值可知,当GRU层在2层时RMSE与MAE最小,CRA最大,此时模型预测性能最佳,因此本文设置GRU层数为2。
训练完模型后,使用其他轴承的全寿命周期数据来验证模型,不同轴承的预测RUL指标如表6所示,根据评价指标值可知:未使用迁移学习的预测模型预测泛化能力差,预测结果不理想。为提高预测模型的预测泛化能力,提出使用迁移学习策略:先选择不同轴承正常阶段的数据对模型进行预训练,使模型学习到不同失效轴承的状态知识,然后对退化阶段进行RUL预测,最终得到其评价指标如表7所示,预测结果如图9所示。

表6 不使用迁移学习预测轴承RUL的评价指标
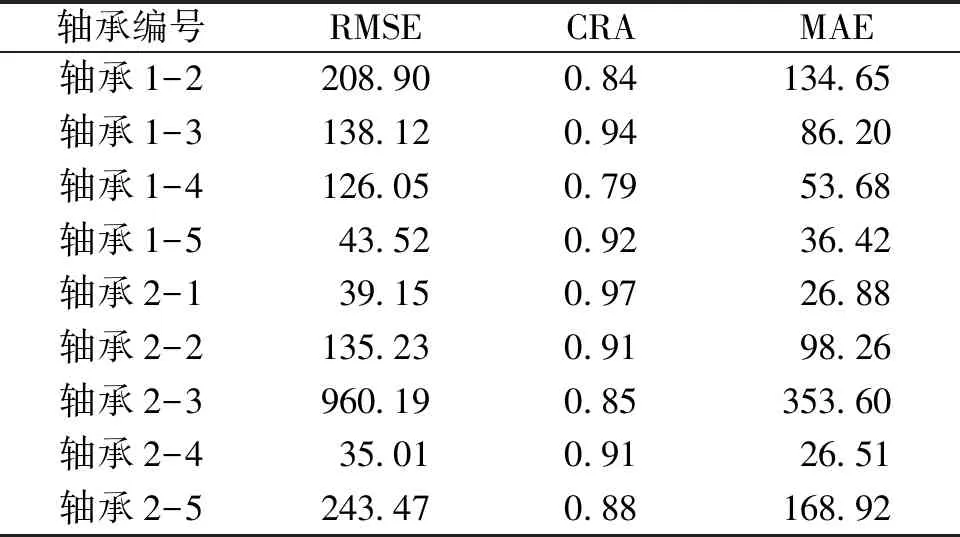
表7 使用迁移学习预测轴承RUL的评价指标
根据图9可以看出,使用迁移学习策略能够准确的预测出轴承RUL,其预测RUL不仅与实际RUL有着相同下降趋势,在RUL值上也能够吻合真实值。根据表7预测指标分析可得:使用迁移学习的预测模型,其RMSE值与MAE更小,更加符合实际RUL,CRA值也都大于未使用迁移学习的预测结果。经过计算,迁移学习优化的预测模型RMSE值提升范围为2.30~449.59,CRA值提升范围为0~0.13,MAE值提升范围为9.90~935。综上可得:使用迁移学习可提高预测模型的稳定性。
4 结论
1)本文计算了轴承信号时域特征,频域特征,模糊熵作为预测模型的输入,保证了轴承状态信息量,防止因输入信息量不足导致模型预测精度低。
2)融合能直接反映机械状态信息的峰峰值、绝对均值、方差、均方根值作为退化指标。并结合“3σ”准则对轴承的状态进行了阶段划分,减少了模型数据的计算量,提升了模型的预测性能。
3)经过迁移学习改进的预测模型,预测RUL平均RMSE从原来的451.62减小到214.40,平均MAE从295.51减小到了94.50,平均CRA从0.77提高到了0.80。不仅提高了预测准确率,也提高了预测RUL的稳定性,使预测的RUL值更吻合轴承真实的RUL。
