工业机器人扰动观测器设计及在线补偿鲁棒控制
2024-05-27崔建鹏冯真鹏庞勇杰
崔建鹏, 冯真鹏, 庞勇杰
(开封大学机械与汽车工程学院, 河南 开封 475000)
0 引言
工业机器人具备操作方式灵活,控制精度高等优势,已成为大型机械部件加工、高精密机械控制系统的重要生产工具[1-2]。利用运动学参数调整的方式控制几何误差。乔贵方[3]提出了一种具有代表性的研究结果,构建了一种包含各项几何误差的校准模型。目前,在线补偿方法容易受到外部因素的干扰[4],一旦遇到负载突变时便会形成很大误差,无法实现快速修正的目标。由此可见,急需开发一种适合在线补偿的新算法。
相关方面的研究吸引了很多的学者。周健等[5]提出了一种基于定长记忆窗增量学习的机器人定位误差在线自适应补偿方法,解决了机器人性能退化影响位姿映射模型适用性的问题,确保算法的补偿精度稳定在目标精度。焦嘉琛等[6]提出一种耦合运动学误差与载荷柔性误差的机器人作业误差分级补偿策略,实现了机器人控制指令的离线修正,通过在线采集作业载荷实现了对载荷所引起柔性误差的在线预测。
根据以上关于工业机器人在线补偿还需优化的情况,本文开发了一种根据扰动观测器实现的鲁棒控制技术。
1 工业机器人的位置控制模型
本文采用适合工业机器人应用需求的位置环控制方式构建控制器系统。实际运动控制模型通常被封装于工业机器人位置控制系统中,可以利用运动控制参数来获取加减速曲线、加速度,并不需要对机器人底层控制器进行访问。构建如下位置控制模型:
式中:A为状态矩阵;B为输入矩阵;D为扰动矩阵。
2 工业机器人扰动观测器设计
2.1 扰动观测器设计
构建了一种二阶观测器估计系统扰动项,动态表达式如下:
式中:ri1与ri2均为辅助变量;si1与si2均为观测器参数。设置以下观测误差:
2.2 滑模控制器设计
1)构建以下滑模面表达式:
式中:ρ 为控制系数变量。
2)构建以下的控制律计算式:
式中:b为调整次数;k1和k2为增益调节系数。
3)满足k1>0,k2>0 的条件,两者都属于控制增益,建立以下饱和函数sat(σ):
控制器具体控制过程见图1。
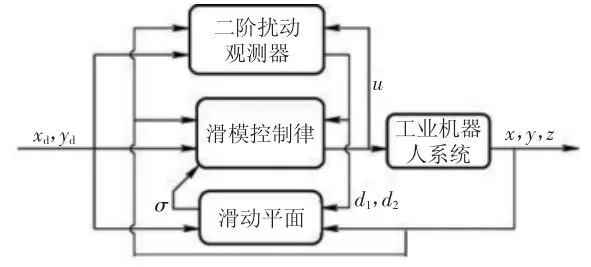
图1 鲁棒控制原理图
3 试验验证
图2 显示了工业机器人闭环控制具体装置结构。采用COMAUSMART5NJ165 型工业机器人进行测试,共包含6 个自由度,可以实现0.085 mm 的定位控制精度,可承受的载荷最大值为165 kg。同时配备了Radian2 激光跟踪仪作为测试设备,可以实现15 μm+5 μm/m 的精度指标。

图2 工业机器人闭环控制系统试验装置
本文采用C 语言程序构建得到以扰动观测器实现的鲁棒算法,并测试了该算法对Linux 控制器的调控性能。闭环控制频率可以达到2 500 Hz,能够实现实时控制目标。
为测试本文DOBC 控制方法相对其它在线补偿模式的优点,根据PID 控制器在线补偿方法开展比较,再对无在线补偿条件下的机器人轨迹追踪进行测试确定在线补偿性能差异。测试期间为各控制方法设置以下参数:
1)DOBC 在线补偿。设定s11与s21为25,s12、s22为10,ρ 为5,k1为10,k2为5,ε 为0.5,根据之前识别结果设定系统参数与输入增益。
2)PID 在线补偿。kp取值为2,kd取值为0.1,ki取值为5,以上参数依次对应追踪误差比例、微分与积分项经过增益计算的结果。
3)无在线补偿。未设置在线补偿的情况下,机器人追踪误差相对PID 与DOBC 在线补偿方式更大,特别是在第25 s 以加入重物形式产生外部扰动时,未设置在线补偿时形成了较大水平振动幅度的误差模值,也无法收敛到0。表明无在线并不适合对外部扰动的快速修正,不能满足精确跟踪控制目标。见图3。
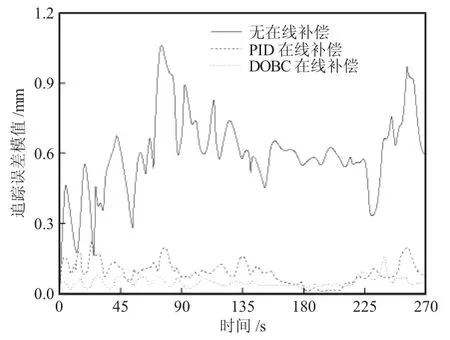
图3 笛卡儿空间内机器人追踪误差模值
图4 给出了DOBC 在线补偿方法扰动值。图沿x与y方向运动时,扰动观测值d1与d2经过小幅度调节后与自身运动过程造成的模型参数变化相匹配,第25 s 设置外部扰动后,z向扰动观测值发生快速变化,同时对滑模控制器的输出结果提供驱动力。通过高效识别扰动特征,使得机器人获得更强鲁棒性,从而实现位置的精确追踪。对于实际应用过程而言,PID在线补偿方式难以实现大控制增益,需对误差进行放大处理才能实现理想补偿效果,显著提高了轨迹追踪难度。

图4 DOBC 在线补偿扰动观测值
为获得可靠测试结果,根据以上分析,本文采用同样处理流程重新测试二次。得到表1 所实验结果。|e|rms 表示追踪误差模值|e|方均根。观测器控制只达到PID 在线补偿39%,相对没有在线补偿只有6%。判断采用本文基于扰动观测器实现的鲁棒控制算法能够获得更高绝对定位精度。
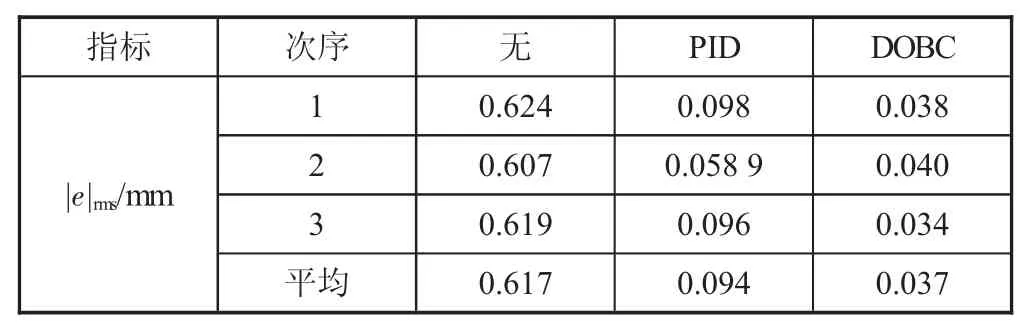
表1 不同在线补偿控制方法的测试结果
4 结论
本文开展工业机器人扰动观测器设计及在线补偿鲁棒控制分析,取得如下有益结果:
1)DOBC 在线补偿方法通过高效识别扰动特征,使得机器人获得更强鲁棒性,从而实现位置的精确追踪,显著提高了轨迹追踪难度。
2)分析追踪误差模值,采用本文基于扰动观测器实现的鲁棒控制算法能够获得更高绝对定位精度,对应复杂工况具备更优轨迹跟踪性能。
