复杂不确定性系统的仿人智能自主控制策略
2024-05-16肖宏启
摘要:为克服液压机械系统底层控制中因复杂不确定性导致的难以实施精准控制难题,文章探讨了基于仿人智能的自主控制策略,总结了底层控制中存在的控制难点与控制作业过程的控制论特性,讨论了液压机械复杂不确定性作业过程的控制策略,并基于自动控制理论与仿人智能控制思维的融合,研究并构造了与液压机械作业过程控制特性相匹配的基本控制算法。然后以挖掘机液压机械系统的一阶不确定性过程控制为例,采用仿真实验验证了仿人智能自主控制策略的合理性、可行性与有效性。仿真对比研究结果表明,采用基于仿人智能的控制是对具有复杂不确定性的液压机械系统底层实现自主控制的首选策略。
关键词:液压机械系统;底层自主控制;复杂不确定性;仿人智能控制策略
中图分类号:TP273"" 文献标识码:A"" 文章编号:1009-3583(2024)-0065-05
Autonomous Control Strategy Based on Human Simulated Intelligence for Complex System with Uncertainty
XIAO Qi-hong
(Department of Computer Science, Guizhou Institute of Aerospace Technology, Zunyi 563006, China )
Abstract: In order to overcome the difficulty of implementing precise control due to complex uncertainties in the underlying control of hydraulic mechanical systems, this article explores an autonomous control strategy based on humanoid intelligence, summarizes the con- trol difficulties in the underlying control and the control theory characteristics of the control operation process, discusses the control strategy for complex and uncertain hydraulic mechanical operation processes, and integrates automatic control theory with humanoid intelligent control thinking, analyzes and constructs basic control algorithms that match the control characteristics of hydraulic machin- ery operation processes. Then, taking the first-order uncertainty process control of the excavator hydraulic mechanical system as an example, simulation experiments were conducted to verify the rationality, feasibility, and effectiveness of the humanoid intelligent au- tonomous control strategy. The results of simulation comparison research indicate that using control based on humanoid intelligence is the preferred strategy for achieving autonomous control at the bottom level of hydraulic mechanical systems with complex uncertainty.
keywords: hydraulic mechanical system; autonomous control of bottom layer; complex uncertainty; human simulated intelligent control strategy
众所周知,挖掘机是以油作为能量介质,借助液压泵将机械能转换为压力能,从而实现对各种控制功能的动作驱动。尽管随着电液技术的迅速发展,挖掘机控制方法有了显著进步[1],但是仍然局限于传统 PID 控制器及其变形控制的研究(如 PID 控制器已与多种智能技术融合,出现了多种具备自学能力的智能 PID 控制器)。挖掘设备主要工作于野外恶劣环境,其工况极其复杂,控制是一个充满复杂不确定性的过程,而 PID 控制是基于严格数学模型的范式控制,诸多不确定性因素的存在往往导致其难以数学建模实施精准控制,因此,控制方法应采用有别于传统的 PID 控制[2-5]。例如,在运算方面表现为数量与逻辑的混合运算,这意味着在控制模式上要完全实现自主控制,也即在无人干预的情况下实施控制,就必须将感知、决策、协同和行动方面的能力进行有机整合,在非结构化环境下自我决策,以实现无人干预的自主控制[6-9]。在上述背景下,采用 PID 控制策略是不可能实现精准自主控制的。因此,有必要探索与复杂不确定性过程控制论特性相匹配的控制策略,以应对传统 PID 控制所面临的严峻挑战。
1过程控制论特性与控制策略
1.1 控制困惑及控制论特性
PID 控制是基于数学建模的范式控制,对于复杂不确定性过程面临诸多挑战。(1)复杂不确定性过程的结构化程度较差,挖掘机的挖掘对象或是砂石松土的混合物或是大小不均的坚硬石块,很难进行数学描述,采用 PID 控制难以实现挖掘过程的精准控制。(2)过程状态变量之间往往存在关联耦合,因受不确定性因素影响,很难实施控制回路之间的解耦,将其分解为独立的单输入与单输出系统进行控制。(3)复杂不确定性过程往往伴随着强非线性特性,通常难以采用数学方法进行量化处理,更难以进行严格的数学描述,不可能实施优化控制。(4)系统结构复杂,其系统参数随时间变化,时延和时变特性是未知的,因此很难采用 PID 对具有不确定性参数的系统进行控制。(5)系统或者过程所处的外部环境复杂多变,具有诸多不确定性,如不可预测性、多样性和随机性。
PID 控制面临上述控制困惑和过程控制论特性,不可能采用基于经典或现代控制理论的控制策略实现有效准确的控制。在实际控制工程中,系统或者过程的模型结构和控制参数是在一定范围内变化的,很难事先准确预测,也不完全具备对过程的先验知识,属于病态结构。因此,采用传统控制方法不可能取得预期的控制效果以及实现预定的控制目标。这是因为传统的 PID 控制任务单一,输入与输出关系简单,过程输入与输出不接受非定量的信息数据,控制过程也不与外部环境进行信息交换,其控制功能存在严重的局限性。为适应控制条件的变化,控制系统必须具备自动规划能力、决策能力,以及集成其他控制模式的能力,这样才能采用多模式控制策略实施对不确定性系统或者过程的控制。因此,有必要探索与过程控制论特性相匹配的控制策略。
1.2 控制策略的选取
面对以上控制论特性的挑战,采用智能控制策略无疑是最为明智的选择。因为智能控制无需人工干预,其控制器就可以自主驱动智能机器实现控制目标,但每一种智能方法都局限于某些特定的应用领域。例如,模糊逻辑控制虽然不需要数学建模,但对复杂过程由于受不确定性因素影响很难确定隶属函数,其控制规则难以覆盖所有工况。因此,模糊逻辑控制策略并不适用于所有的控制过程。其他智能控制方法如学习控制等,对复杂过程中的不确定性因素处理也没有很好的解决方案。总之,用一般智能控制策略解决复杂不确定性过程控制的理由是不充分的。所谓智能,是指人类对事物观察、学习、理解和识别的能力,也就是指人们理解和识别各种事物适应性行为的能力。仿人智能控制器 HSIC (Hu- man Intelligent Controller)的基本特征是在控制功能和控制结构方面模仿控制专家的控制行为[10,11]。例如,一个优秀的车辆驾驶员可以根据实际行驶轨迹和期望行驶轨迹变化情况不断地修正车辆行驶方向,以确保车辆在期望的轨迹上行驶。正是人(控制器)这个自主的控制系统保证了车辆的正确行驶方向。这非常贴近实际控制工程的实际应用场景,也无需建立精确的数学模型。HSIC 控制本质上是基于输入和输出描述的黑箱模型控制策略,它可借助广义的知识控制模型描述其过程特性,将人们的控制经验、控制技巧、控制智慧等转化为求解控制问题的算法。因此,对于复杂不确定性系统或者过程的控制采用基于HSIC 的控制策略是可取的和有效的。
2 控制模型和控制算法
2.1 控制模型
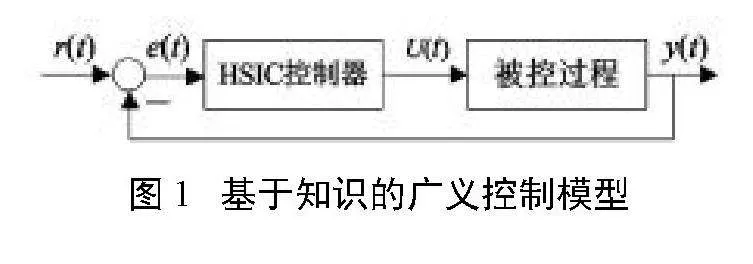
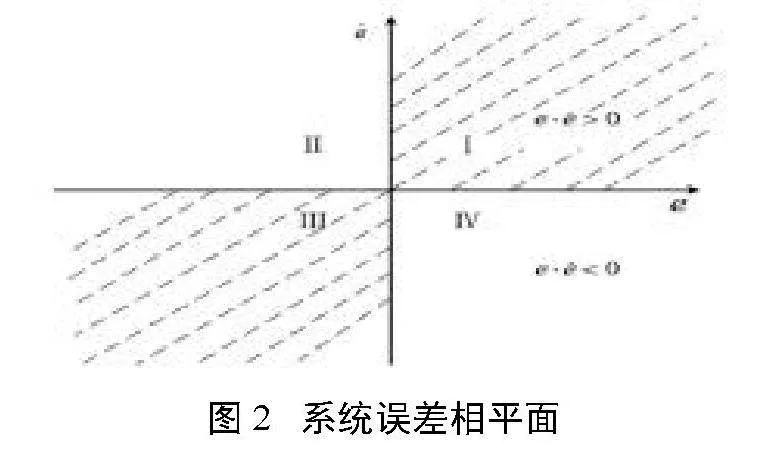
图1模拟了人类智能的控制行为,它按照智能控制论解决控制问题的思路,采用基于知识的广义控制模型对系统控制行为进行描述。其突出优点是,这种控制模型易于将人类积累的控制经验,采用人工智能中的产生式规则描述。只要系统或者过程的运行状态与期望的控制状态产生偏差,控制器就要实施控制强迫其回复到系统或者过程期望的控制状态。事实上,图1就是一个基于广义控制模型的负反馈自动控制系统。该控制模型并不关心系统或者过程产生误差的原因,关心的仅仅是系统或者过程产生的误差和误差变化的趋势。在图1中,被控过程的输入为 U (t),输出为y (t),系统输入为r (t),系统误差为 e (t)= r (t)- y (t),假设 e 为系统误差随时间的变化,那么上述所有物理量都是物理可检测的。由此可构造出 - 误差相平面,按照自动控制理论,根据状态在误差相平面所处的位置就可识别出系统应当采取的控制模式。
系统误差相平面如图2所示,e 为横坐标,e 为纵坐标。在gt;0的情况下,又可分为gt;0或lt;0两种情况,如果 egt;0,那么有 egt;0,于是系统运行于误差相平面的第Ⅰ象限,显然误差呈现增加趋势,也就是说,误差将变得越来越大,因此可以选择负反馈比例控制模式进行控制;如果èlt;0,则 e e·lt;0,于是系统运行于误差相平面的第Ⅳ象限,系统误差 呈现减少趋势,显然可以选择保持控制模式,因为在这种情况下,误差 e 会自动趋于零。类似地,在 e0的情况下,也可分为gt;0或lt;0两种情况,对于lt;0,有e gt;0,那么系统运行于误差相平面的第Ⅲ象限,误差呈现出增加的趋势很明显,因此可以选择比例控制模式;对ègt;0,有 e lt;0,那么系统运行于误差相平面的第Ⅱ象限,显然误差e 呈现出减少的趋势,因此应当选择保持控制模式,与上述雷同,误差 e 会自动趋于零。上述分析表明,控制模式的选取是可以根据系统误差及其变化率进行控制模式识别的。
2.2 HSIC 控制器特性
2.2.1静态特性
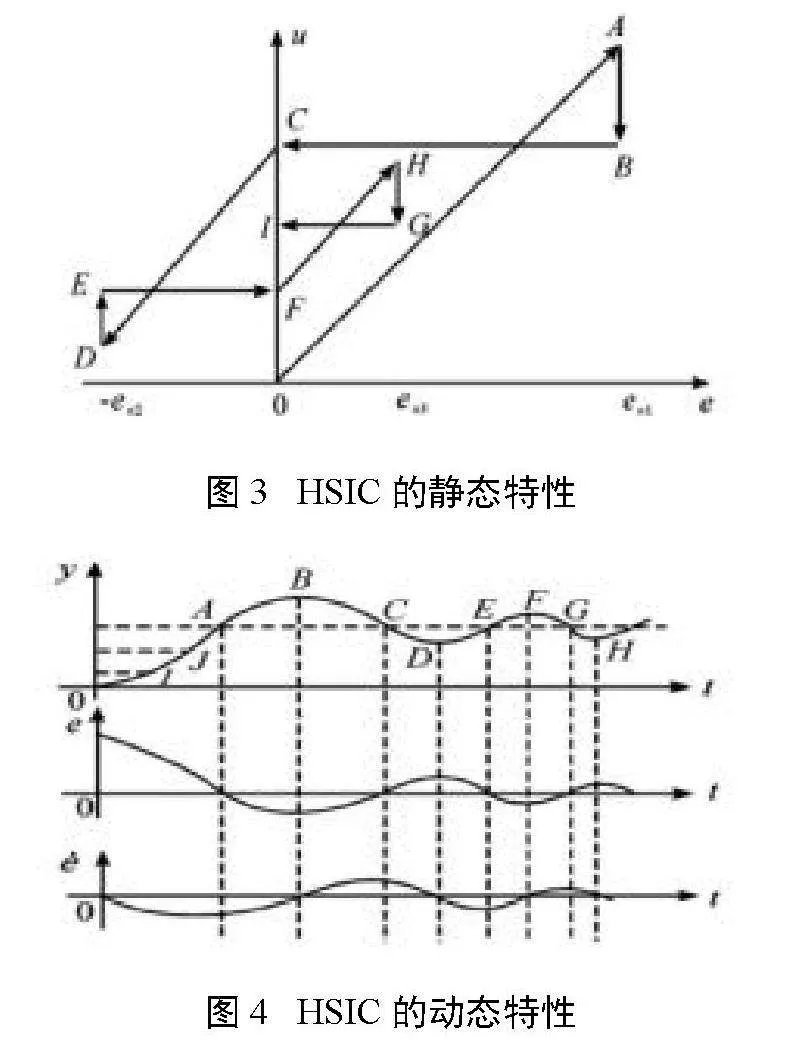
静态特性如图3所示,图中e 为过程误差,坐标 u 为控制器的输出。如果用0ABCDEFHGI 的轨迹表示系统状态的转换过程,那么在调节和控制过程中,每个运动轨迹段都有其与之对应的控制模式。以0A 段为例,假设 为比例系数,控制器输出为= p ,特征为gt;0,gt;0,gt;0,运行范围为区间[0, en1]。达到 en1后,系统进入 AB 的抑制控制部分,如 P 被替换为 Pk 并且≯1,则控制输出是按比例减少到 B 点,直到01= p n1。点 B 之后,控制器的输出保持不变,进入BC 段,控制模式保持不变,e 从 en1逐渐减小到0。后续 CDEF 和 OABC 的轨迹分析相似,只是变化方向与前一个控制周期的动作方向相反。同样,也可以对轨迹的 FHGI 段进行分析,经过若干个控制周期的控制,系统状态最终达到稳定的状态。
2.2.2动态特征
HSIC 动态特性如图4所示。研究图4中Y、e 和 e·之间的关系,有助于找出控制过程中应当遵循的控制规律。现以响应曲线0ABCDEFGH 为例,分析各个控制段的误差特征,例如,段0A 为(e gt;0,特lt;0),AB (e lt;0,e·lt;0),BC(e lt;0,特gt;0),CD (e gt;0,特gt;0),DE(e gt;0,特lt;0),EF (e lt;0,elt;0),FG(e lt;0, egt;0),GH(e gt;0,e·gt;0)等等,在响应曲线的不同控制段其控制策略是不同的。例如,如果 e lt;0,对 egt;0而言,在e lt;0情况下,按照相平面分析,应当选择保持控制模式;对 elt;0而言,在e特gt;0情况下,应当选取比例控制模式。上述动态、静态特性的分析表明,HSIC 控制策略就是模拟人的思维模式与思维过程,根据不同的误差特征模式采用不同的控制模式。
2.3基本控制算法
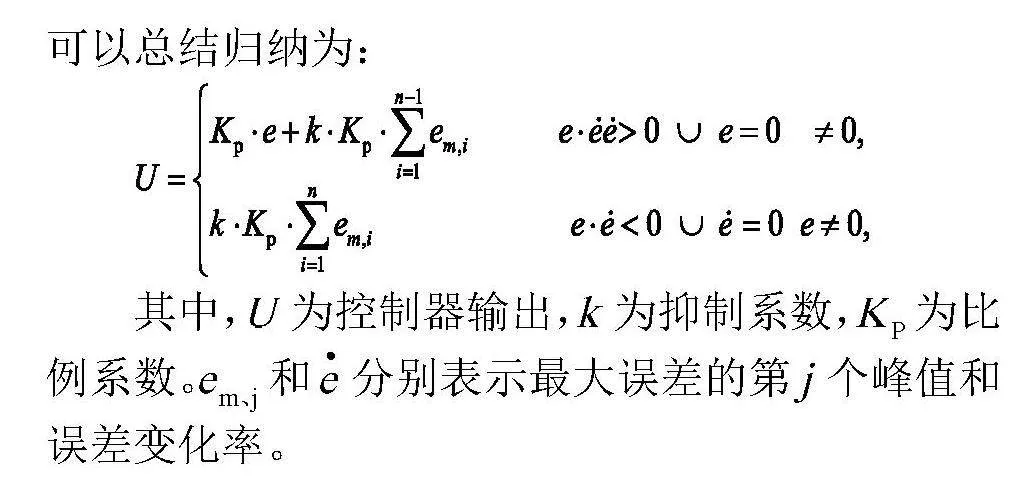
基于图1和图2,由自动控制原理可知:当e e·gt;0、 ORe=0和e≠0时,过程误差绝对值Abs(e)一定会出现增大的趋势,为了减小误差,系统必须实施控制;当 e 特lt;0、ORe·=0和 e ≠0时,过程误差绝对值 Abs (e)必然出现下降趋势,系统可以实行保持控制模式,因为最终过程误差会自动趋近于零。以上表明,当 e=0和e·≠0或 e e gt;0时,应选择负反馈的比例控制模式。当 e=0、AND e ≠0、ORe e·lt;0时,过程控制可以选择保持控制模式。综上所述,基本控制算法可以总结归纳为:
其中,U 为控制器输出,k 为抑制系数,KP 为比例系数。em、j 和e 分别表示最大误差的第j 个峰值和误差变化率。
上述基本控制算法,事实上就是通过交替地实施开环和闭环控制以实现对被控过程的控制。这里值得注意的是:如果被控制过程更为复杂,基于基本控制算法,借助产生式规则,同样可将控制专家知识和现场操作者的实践经验以及控制智慧等嵌入基本控制算法中,以构建完全匹配于复杂不确定性过程控制论特性的控制算法[12]。
3 仿真实验及其结果分析
3.1仿真实验
挖掘机的挖掘动作本身就是一个复杂的不确定性过程,其过程特性可以粗略地用一阶惯性加一个纯时滞环节进行等效描述。假设挖掘过程模型为 w (S)= K e- s/( s +1),式中k 为增益,为纯滞后时间, T 为时间常数。
挖掘过程中各种复杂不确定性因素对控制效果的影响,在仿真实验过程中可等效为过程模型控制参数的变化加以模拟,为方便分析,现选取K =1,=1.2和=2,则过程控制模型为:W(S)=e-2s/(1.2S +1)。
为便于比较 HSIC 控制策略的控制效果,仿真实验过程中以 PID 控制响应为参照,然后将 HSIC 控制的响应与 PID 控制的响应进行比照,考察两种控制策略的鲁棒性能,鲁棒性强的控制策略就是可取的。
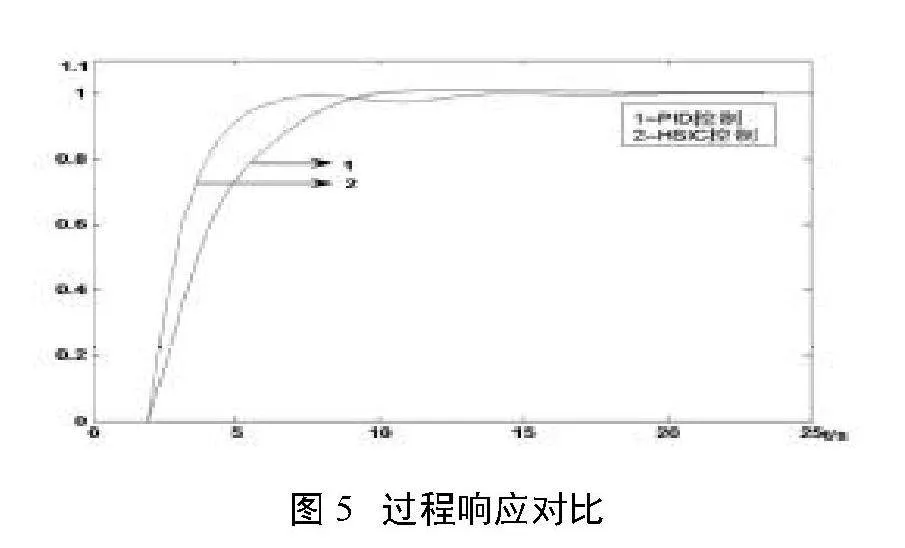
仿真实验在 MATLAB 环境下进行,借助 Simu- link 首先搭建仿真模型,然后基于单位阶跃输入考察不同控制策略的过程响应。图5所示为 PID 和 HSIC 控制两种控制算法的单位阶跃过程响应,比较两条响应曲线可知,HSIC 控制策略在上升和调整时间以及平稳性方面明显优于 PID 控制,可见 HSIC 控制策略控制品质比 PID 更好。
如果将复杂不确定性因素影响等效为控制过程中控制参数的改变,那么对控制问题的研究就可转换为控制参数变化时控制策略的鲁棒性能研究,其中,鲁棒性强的就是优秀的控制策略。
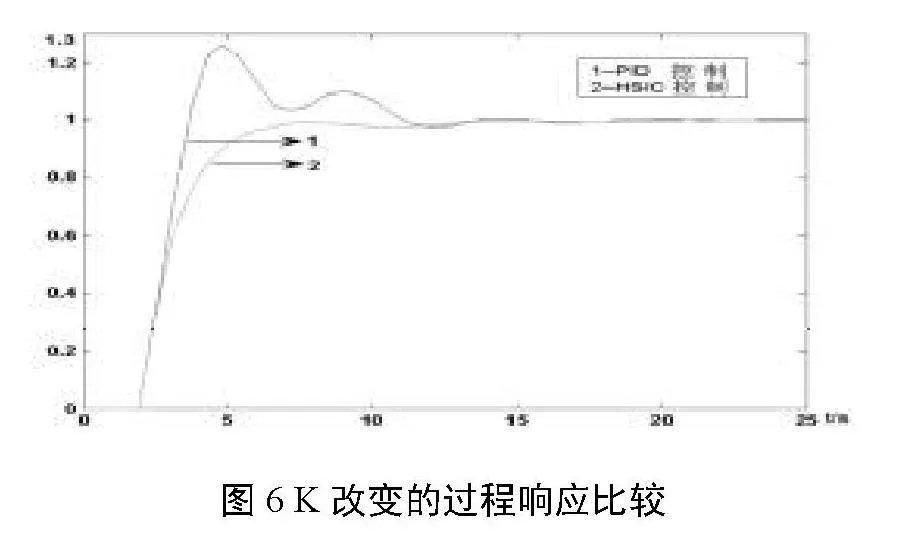
3.3.1传递函数中的控制参数K 由1变到2,其他条件均不变,两种控制策略的单位阶跃响应如图6所示。比较其响应可知,当K 改变时,PID 控制将产生大幅度的超调量,但 HSIC 控制无超调产生,上升快和调整时间短而且调节平稳性好。
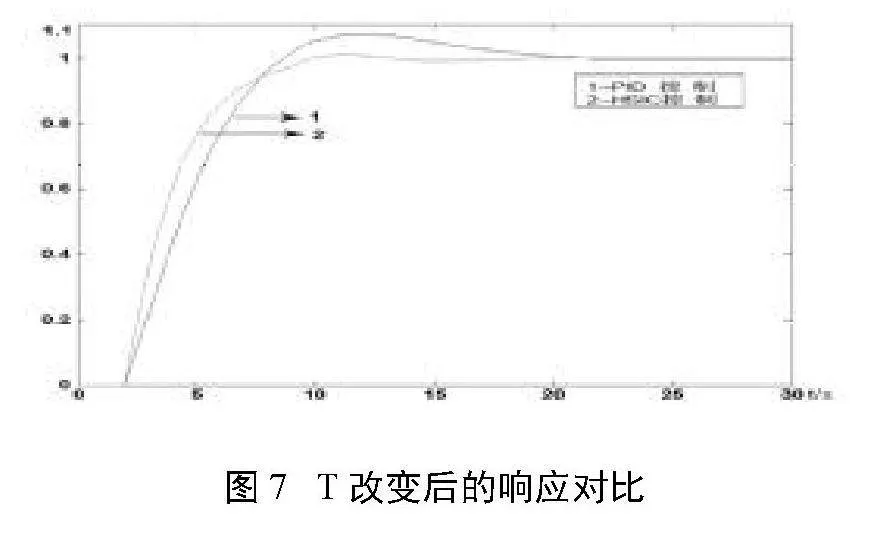
3.3.2传递函数中的 T 由1.2s 变为10s,其他条件均不变,其单位阶跃响应如图7所示。从图7可知,PID 控制超调略有增加,在上升和调整时间以及调节平稳性方面明显不如 HSIC 控制好,而 HSIC 控制的响应几乎没有发生变化。
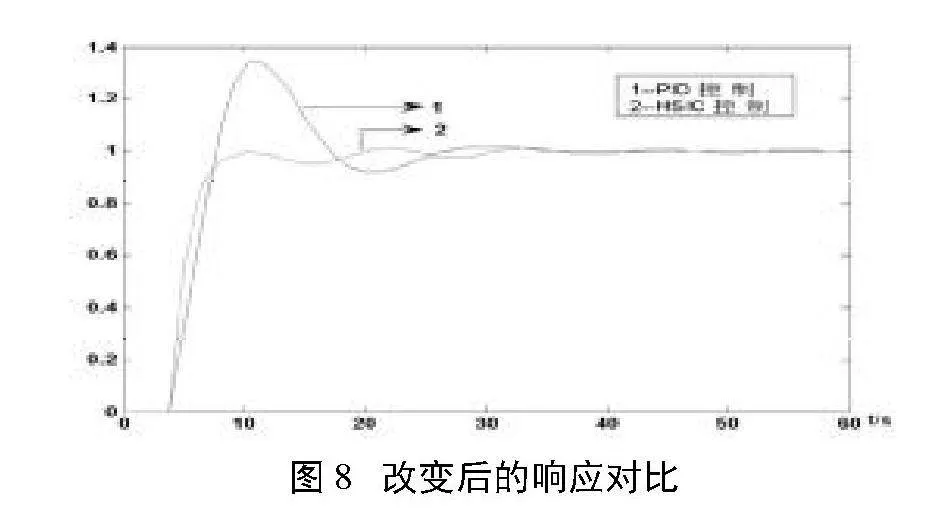
3.3.3传递函数中的由2s 变到4s ,其他条件均不变,其单位阶跃响应如图8所示。分析图8可知,HSIC 控制的过程响应几乎没有发生变化,仅仅产生了一个微小幅度的波动,在响应时间上推迟了2s,但是 PID 控制产生大幅度的波动与超调。在上升和调整时间以及调节平稳性方面明显不如 HSIC 控制策略好。
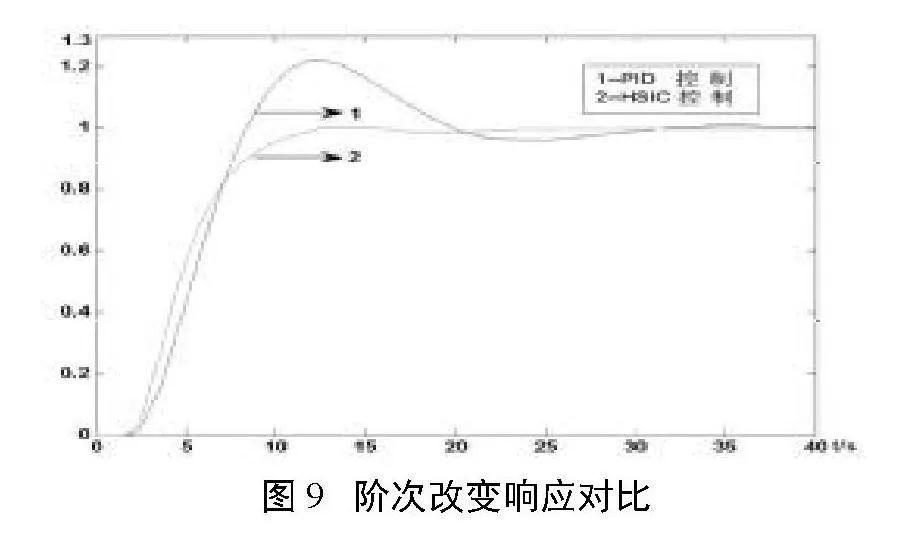
3.3.4在被控过程中增加一个惯性环节1/(2s+1),也就是系统内部结构发生变化,即过程阶次由一阶变为二阶过程时,其他条件均不变,其过程的单位阶跃响应如图9所示。分析图9可知,PID 控制存在严重超调,在上升和调整时间以及调节平稳性方面明显不如 HSIC 控制策略好,而 HSIC 控制的过程响应几乎没有发生变化,并且也无超调量产生。
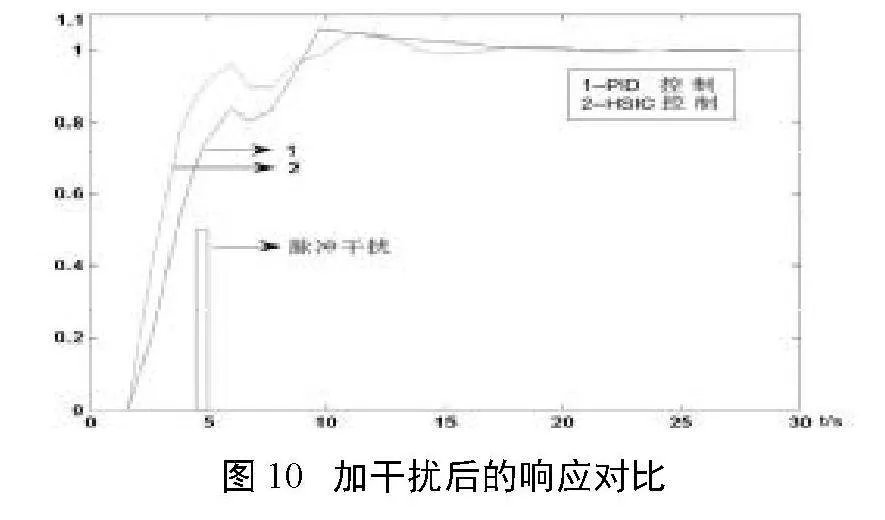
3.3.5在其他条件不变、t =4.5s 时,对控制过程施加一个脉宽为0.5s、幅度为0.5的外部脉冲干扰,两种控制策略的单位阶跃响应如图10所示。对比分析图10可知,在极其恶劣的外部环境干扰下,HSIC 比 PID 控制策略具有更好的抗干扰性能。
3.2仿真实验结果分析
分析对比研究图6-图9中两种控制策略的单位阶跃响应变化可知,在响应上升时间、调节时间、运行平稳性和是否存在超调等方面,HSIC 比PID 控制策略具有更好的控制品质。加入外部严重干扰后的过程单位阶跃响应的对比表明,HSIC 比PID 控制具有更强的鲁棒性能(如图10所示)。实验仿真表明,尽管在各个控制参数改变时,HSIC 和PID 两者在无稳态误差方面差别不显著,但PID 控制存在明显的超调,而HSIC 控制的响应几乎没有什么变化。在上升时间与调整时间指标方面,HSIC 比 PID 控制具有更好的控制品质指标。由上述结果分析可知,对复杂不确定性过程的控制,HSIC 控制策略具有更优秀的控制品质。
4结论
上述理论分析与实验仿真均表明,HSIC 控制策略具有很强的自适应和鲁棒性能,对复杂不确定性过程实现自主控制而言,应当列为首选自主控制策略。此外,在大量现实控制工程实践中,HSIC 控制策略无需建立精确的数学模型,算法中的所有物理量都是物理可检测的,非常贴近控制工程实际,一旦控制系统运行状态与期望控制状态产生偏差,就可自主地实施强制性的控制使其回复到期望的控制状态。因此,基于 HSIC 的自主控制策略是一种值得参考借鉴的控制策略。
参考文献:
[1]罗娜娜,李广.基于非线性PID 控制的挖掘机液压系统稳定性研究[J].中国工程机械学报,2019, 17(4):367-370.
[2]周国清.复杂底层过程控制中基于仿人智能的融合策略[J].四川兵工学报,2014,35(8):101-104.
[3]毕建朝.仿人智能控制在 SBR 污水处理系统中的研究与应用[D].重庆:重庆大学,2012.
[4]王静,肖超.复杂过程的多模态仿人智能控制策略[J].微电子学,2013,43(2):221-224.
[5]李瑞婷,巫茜,刘步青.原水投药净化不确定性复杂过程的多模态控制[J].辽宁工程技术大学学报(自然科学版), 2016,35(2):211-214.
[6]沈硕,戴义保.工业现场无人值守控制系统的实现[J].南京理工大学学报,2002,26(12):71-74.
[7]周建军.煤矿井下胶带输送机的无人值守控制系统[J].机电工程技术,2017,46(9):101-103.
[8]陈艳武.无人值守换热站智能控制系统的研究[D].大连:大连海事大学,2013.
[9]李磊.综采无人值守工作面液压支架间架电液控制器主控系统的研究[D].太原:太原理工大学,2010.
[10]李祖枢,涂亚庆.仿人智能控制[M].北京:国防工业出版社, 2003.
[11]王耀南,孙炜.智能控制理论及应用[M].北京:机械工业出版社,2008.
[12]李会军.城市生活垃圾焚烧的智能控制策略[J].重庆理工大学学报(自然科学),2019,33(1):64-68.
(责任编辑:曹先东)
