一种可供踝关节康复训练的智能轮椅设计
2024-05-13褚天月王景炎潘黎明陈晋市马东梅黄蕾殷宝月徐昕
褚天月,王景炎,潘黎明,陈晋市,马东梅,黄蕾,殷宝月,徐昕
1. 吉林大学第一医院 手足外科护理平台,吉林 长春 130021;2. 吉林大学 机械与航空航天工程学院,吉林 长春 130025
引言
随着居民年龄的增长导致的骨密度降低、危险作业及交通意外事故增多,大手术、脑血栓患者和下肢残疾人等下肢功能障碍患者的数量不断上升。目前,轮椅作为肢体不便者、体力受限的老年人及下肢残疾人士的一种实用代步工具,受到越来越多的关注。
国内对智能轮椅课题的研究成果主要集中在以下几个方面:王慧等[1]提出根据使用者姿态变化可实现对轮椅行驶状态的控制,且具有良好的减震效果;吴清等[2]运用功能-行为-结构模型对智能轮椅支撑、连接、驱动系统等进行设计,验证了自动辅助驾驶轮椅的可行性;王京华等[3]基于起立机构设计了可如厕电动轮椅,解决了下肢运动障碍者独自如厕的难题;王涛等[4]、王秀红等[5]通过采用行星式、履带式爬坡机构实现轮椅爬楼功能,保证了轮椅爬楼具有驱动力足、稳定且不倾翻等优点;潘路等[6]采用人机交互的方法,设计了具有自动避障、站立变形、辅助康复作用的多功能轮椅。
国外学者对康复轮椅的研究成果归纳为以下几个方面:Kim 等[7]设计了康复模块和生物识别模块,可对下肢功能障碍患者进行定期康复锻炼与诊断;Cao 等[8]通过声控系统实现了对轮椅的多姿态转换和平衡控制,使患者的独立性和生活质量得到提高; Zgallai 等[9]、Amrein 等[10]通过深度学习脑信号识别运动轨迹,搭配传感装置以帮助无法控制身体的盲人和瘫痪患者代步移动;Long 等[11]研究了混合脑机接口系统对于轮椅运动方向和速度的控制,验证了混合控制系统的可行性;van den Akker 等[12]通过实验推测未来影响轮椅使用者生活方式的干预因素包括日常生活的平衡、专业指导、设施的可靠性、社会支持等方面。
根据上述研究成果可知,智能轮椅目前的发展以可供自主控制、升降对接、多地形移动、智能化为主,但专业化辅助康复功能设计较为匮乏。本文结合目前国内现有轮椅,旨在设计一种可供下肢功能障碍人士使用的康复智能辅助轮椅,搭配控制电路以满足踝关节康复训练的需求,保证康复过程的安全性、可靠性。
1 功能分析与设计
1.1 功能分析
目前,国内轮椅产品功能主要以行走、升降、辅助、智能化等为主。为设计一款贴合用户实际使用需求的产品,从术后患者、脑血栓患者、老年用户与残疾人士等下肢功能障碍人群的自身需求出发,综合考虑结构、性能、成本等诸多因素,最终确定智能轮椅需具备以下功能:① 行走功能:在驱动器的作用下,轮椅可搭载使用者进行室内外行走,并实现调速功能,保证运动平稳可靠,具体操控方式可分为手动与自动控制;② 升降功能:用户可自主调节轮椅高度,以实现用户对座椅不同位置高度的需求,如可实现高低位自由切换、取物、办公等;③ 辅助功能:主要通过轮椅辅助机构帮助下肢功能障碍人群进行康复训练,预防大手术后患者深静脉血栓的发生,防止脑血栓患者因功能障碍缺乏活动造成肌肉萎缩,同时促进脑血栓患者的血液循环,帮助受损肌肉恢复生长。
根据市场调研和社会调查,目前踝关节障碍恢复已成为用户的重要需求,故本文在基于行走、升降等功能的基础上,主要针对辅助功能的踝关节康复机构进行设计,以满足用户的使用需求。
1.2 踝关节结构分析
人体足踝部结构运动较为复杂,包含3 个旋转轴和3 个运动平面,共3 个自由度运动。在足部矢状面的动作为跖屈和背屈,水平面的动作为外展和内收,冠状面的动作为外翻和内翻,脚踝活动示意图如图1 所示。脚踝关节的活动度是康复运动机构设计的核心要素,由于康复用户运动角度远小于正常极限标准以及康复机构配合轮椅结构干涉等因素,设计轮椅脚踝外/内翻、跖/背屈的极限运动角度以不超过25°较为合适。

图1 脚踝活动度示意图
1.3 脚踝康复机构设计
为满足脚踝关节多自由度运动与驱动系统相匹配的需求,脚踝康复机构由驱动部分、支撑部分、铰接部分组成。驱动部分包括舵机、驱动杆、电动推杆;支撑部分包括支撑底板、转盘踏板、支撑杆、固定杆;铰接部分包括铰接支架、铰接机构、连接轴、定位销孔等。脚踝康复机构主要通过舵机和电动推杆运动构成并联运动机构,搭配转盘踏板的铰接机构完成机构多自由度运动,实现辅助踝关节康复训练的产品功能,踝关节康复机构设计如图2 所示。

图2 踝关节康复机构设计图
2 结构设计与仿真分析
2.1 总体结构设计
优良的结构设计在康复过程中起着至关重要的作用,不良或者错误的结构设计会影响康复效果,甚至造成不可逆的后果。本文对智能轮椅进行功能分析后,最终设计轮椅整体,包括座椅结构、靠背结构、驱动机构、康复机构等。智能轮椅座椅部分通过固定支架与靠背部分相连,座椅底部与轮毂连接,起到总体刚性支撑并保持结构稳定性的作用;驱动机构布置于智能轮椅底部,搭配万向轮可控制轮椅多方位运动,刹车机构位于扶手底部,便于患者对车体速度及时调控;康复机构由驱动、支撑、铰接等部件组成,实现踝关节多自由度匀速翻转等康复功能,见图3。

图3 康复轮椅结构图
辅助轮椅尺寸设计应贴合实际用户的使用情况,以国内人体测量数据作为参考,最终设计智能轮椅模型的关键指标[13],见表1。

表1 轮椅模型关键指标(mm)
2.2 使用方法
为便于患者操控轮椅的各项功能,产品将控制按钮开关设置在扶手上,当患者坐在康复轮椅上时,可通过扶手上的按钮开关启动行走,搭载底部万向轮以实现转向功能;当遇到突发状况时,拉起刹车把手即可实现紧急制动,防止意外事故的发生;患者可通过控制升降按钮实现整车平台的升降,实现高、低位切换的功能;在启动康复按钮后,轮椅脚踏板处的康复机构在多个电动推杆的共同作用下,帮助患者进行踝关节康复训练,踝关节的受力情况可根据患者的实际需求进行调整。
2.3 控制系统设计
为确保控制系统具有控制精度高、设备反应迅速、调节形式便捷等优势,经过不同控制源的对比分析,本文控制源采用瑞士意法半导体公司的产品STM32F103型号单片机,搭配Cortex-M3 内核和ARMv7-M 架构,具有成本低、外置接口丰富、易于与轮椅结构相匹配等特点,产品核心板实物图如图4 所示。控制系统通过内部电源为STM32F103 单片机供电,通过总电源分别为减速舵机与电动推杆供电。单片机引脚引出与控制驱动器的1/2 处相连,通过编写程序实现驱动器对电动推杆、减速舵机的相关控制。为避免紧急情况,系统设置急停开关以保证用户的使用安全。

图4 STM32F103单片机实物图
由于脉冲宽度调制(Pulse Width Modulation,PWM)采用高电平输出有效配置,因此在整套设备调试时采用共阴极原理接线法[14]。此外,为满足内部逻辑的需要,主要编写PWM 程序、时钟中断跳出程序、按键控制封装程序,其逻辑流程框图如图5 所示。

图5 内部逻辑流程框图
(1)PWM 程序:包含输入输出(IO)引脚配置函数、输出IO 模式、通用输入输出口(GPIO)引脚频率、自动重装载寄存器(ARR)值、计数器时钟分频因子(PSC)的宏定义与参数值输入等功能。
(2)时钟中断跳出程序:封装函数作用于系统计时中断,系统主函数跳入执行PWM 输出,实现对驱动关节的控制。
(3)按键控制封装程序:封装函数作用于按键控制,通过对增减按键的多次触发,达到改变脉冲输出函数、调节活动关节运动速度与角度幅值的目的,以满足不同康复患者的实际需求。
2.4 仿真分析
2.4.1 动力学仿真分析
为验证该康复机构是否符合动力学设计标准,本文通过CATIA 软件建立三维模型,利用Adams 仿真软件搭建平台并进行动力学分析。首先,将三维模型导入软件中进行初始值设定,设置各运动副、负载、约束等参数条件,完成仿真模型的预处理。在康复训练过程中,分别对纵向踝关节的缩进、伸长进行仿真分析,解析机构动力学参数,从而作为评定机构合理性的依据[15]。
2.4.2 静力学仿真分析
由于轮椅辅助零件具有支撑效果,为验证机构中各零件在工作姿态及受载情况下是否因超过材料的屈服极限而导致零件失效,在对产品进行三维建模的基础上,利用ANSYS 软件进行静力学仿真。首先将三维模型导入模块并进行预处理工作,接着进行网格划分、局部网格加密等操作,最终对核心零件进行选材并施加外部载荷,观察其强度、最大应力是否满足要求。
3 结果
3.1 动力学仿真结果
在踝部纵向关节的仿真分析过程中,应考虑电动推杆伸缩长度和速度、翻转运动角度和角速度以及翻转扭矩等因素。通过Adams 软件对纵向踝关节的伸长、缩进动作进行仿真分析,拟合曲线结果表明,电动推杆纵向缩进长度为80 mm,上翻角度为0°~25°;伸出长度为40 mm,下翻角度为0°~14°;电动推杆伸缩总长为120 mm,脚踝纵向弯折角度在-25°~14°区间内,符合人体工程学的最大翻转角度,且仿真过程中曲线平滑过渡,无凸点产生,运动较为平稳,该过程运动角度变化曲线如图6 所示。

图6 踝关节翻转运动角度变化图
将电动推杆伸缩速度转化为踝部关节纵向翻折角速度,仿真得出推杆收缩状态下踝部关节纵向运动启动角速度约为6.65 °/s,收缩运动达到上翻角度极限时,翻转角速度接近5.85 °/s;推杆伸长状态下,踝部关节纵向运动启动角速度为4.98 °/s,伸长运动达到下翻角度极限时,翻转角速度接近5.95 °/s;在电动推杆运行速度可调的情况下,总体翻转过程运动周期为8 s,平均翻转角速度约为5.9 °/s,符合人体工程学设计要求5~20 °/s 的速度范围,运动角速度曲线如图7 所示。

图7 踝关节翻转运动角速度图
在踝部进行翻转运动时,设置脚部与机构部件的综合质量为12 kg,计算得出上翻运动的最大启动扭矩值为20500 N·mm,下翻运动的最大启动扭矩值为20602 N·mm。由仿真结果分析得出,踝部翻转运动所需扭矩约为20 N·m,故后续电动推杆选型时,其推力产生的扭矩应大于该参考值,该转动过程扭矩随时间变化曲线如图8 所示。
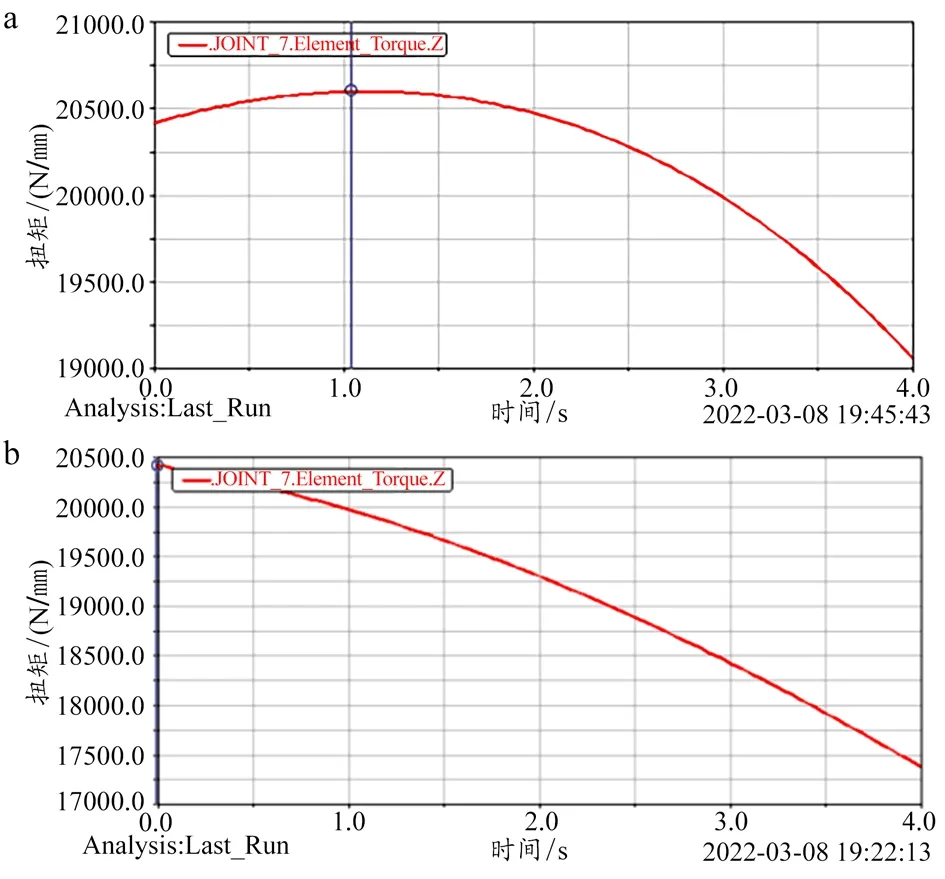
图8 踝关节翻转运动扭矩图
由于踝部关节横向运动主要通过直流减速舵机实现对该运动的控制,在踝关节横向运动的仿真分析过程中,应着重考虑舵机转动角度、角速度、扭矩等因素。通过Adams 对外展运动进行仿真分析,拟合出外展运动角速度与运动角度的相对关系如图9 所示,蓝色虚线为舵机所提供的角速度,红色实线为外展运动翻折角度。拟合曲线结果表明,舵机所提供角速度较为稳定,维持在10 °/s,符合人体工程学设计要求5~20 °/s 的速度范围;踝部横向运动翻折角度最大值为20°,贴合人体脚踝最大翻折角度的正常值,且仿真曲线平滑、稳定。
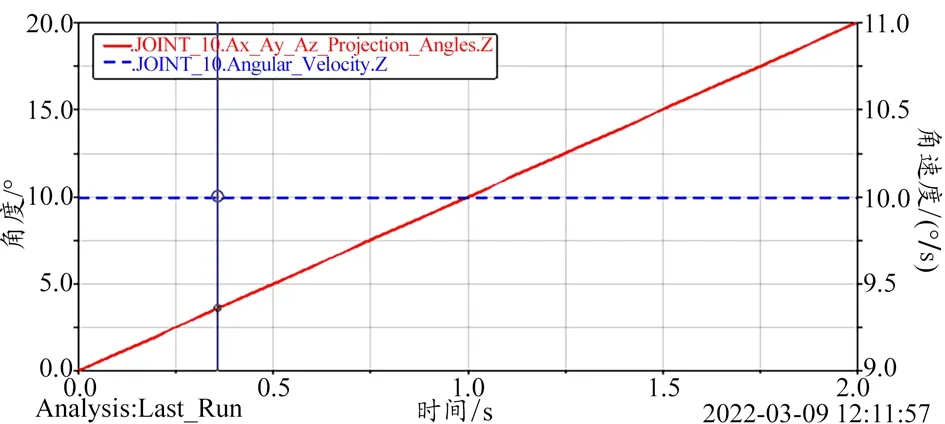
图9 踝部横向关节角度/角速度图
在脚踝部关节进行外展运动时,设置脚部与机构部件综合质量为7 kg,计算得出启动与摆动的扭矩值范围为17205~17229 N·mm。如图10 所示,由于质心位置设定时,模拟脚部放置处产生局部不居中的情况,产生扭矩上的微小凸点,不影响后续的平稳运动,故通过仿真分析可得,踝部外展运动所需扭矩约为17.2 N·m,因此,后续所选舵机产生的扭矩值应大于该参考值,踝部横向关节运动扭矩随时间变化曲线如图10 所示。

图10 踝部横向关节扭矩图
3.2 静力学仿真结果
对康复机构核心零件载荷踏板进行静力学分析,假设一位身高180 cm、体重80 kg 的成年人作用在脚踝康复运动机构上的重量约为8.7 kg,将相应载荷作用于零件,并设置边界条件。载荷踏板采用尼龙材料,屈服强度为60 MPa。通过载荷踏板应力-变形云图计算结果可知,载荷所产生的最大屈服应力为1.4 MPa,最大变形量为0.465 mm,均远小于材料的许用应力和最大形变量,可满足设计的强度和刚度要求(图11)。

图11 载荷踏板应力-变形分析云图
通过仿真分析结果可知,康复机构中的电推杆和舵机并联装置可满足运动角度变换且运行速度稳定,同时通过计算可得踝关节弯折、翻转等运动所需电推杆和舵机提供的最大扭矩,仿真结果验证了康复轮椅机构设计的可行性。在静力学分析中,康复机构中载荷踏板的强度和刚度均满足使用需求,符合设计准则。
3.3 实验样机性能测试
为检验多功能康复轮椅的各项功能与实际性能,采购各项零部件并进行组装及制作装配控制系统,搭建智能康复轮椅实物样机,见图12。

图12 康复轮椅实物样机图
通过搭建传感器对样机进行实验测试,采集康复轮椅的相关状态参数,并参照检测指标进行数据对比,校对结果如表2 所示。

表2 测试参数与标准校对表
4 讨论
在智能康复轮椅与踝关节康复机构的相关研究中,黄夏等[16]对当前国内踝关节康复装置进行总结,设计与优化了相关结构,最终提出优化后内翻、外翻运动角度范围为0°~30°,背屈、趾屈运动角度范围为0°~20°,外展、内收运动角度范围为0°~20°;王志浩等[17]设计了牵引式踝关节康复机构,通过仿真分析得出趾屈最大转角为29.71°,背伸最大转角为19.43°;徐桂元等[18]设计了一种脚踏式膝、踝关节康复训练装置,该设计的踝关节跖屈、背伸范围区间为-15°~16°,活动角度范围为31°,踝关节装置最大扭矩为27 N·m;张彦斌等[19]基于无耦合转动并联机构设计了一种踝关节康复机器人,其仿真分析结果表明,踝关节达到最大背屈量30°时需要的扭矩为44 N·m,达到最大外展角度15°和最大内收角度25°时所需要的扭矩分别为44 N·m 和33 N·m。以上相关研究均验证了本文检测结果的科学性与可行性。
综上所述,不同研究学者对于踝部关节的相关运动参数设计各有不同,但康复效果均有相似之处。本文实验样机测试结果与上述各研究结论总体相符,彼此差异主要由不同实际康复需求决定,各研究所提出的运动参数均符合人机工程学。
在国内关于踝关节康复仪器的研究方面,李靖靖等[20]设计了一种基于3-UPRU/S 并联式踝关节康复机构,通过Adams 软件对该康复机构的运动性能与训练规划进行了研究,并通过搭建样机进行了实际工作角度与训练规划的验证,优化了康复周期内角速度的波动;边辉等[21]研究了一种具有弹性转动副的生物融合式踝关节康复机构,通过对踝关节康复角与机械机构输出间的映射关系进行分析,使驱动装置实现了对人体关节的混合控制;刘延斌等[22]主要针对踝关节的主动控制进行仿真模拟,建立了踝关节康复设备的动力学模型,并提出气动肌肉冗余并联驱动的柔顺控制策略;禹润田等[23]设计了一种柔性绳驱动式踝关节康复机构,通过对驱动绳索张力进行分析、求解和优化,保证了设计平台具有良好的灵巧性和刚度性能;李少帅等[24]以单开链为单元对三转动并联机构进行型综合,通过Adams 软件对机构运动学进行分析,验证了结构设计的应用可行性,为后续机构尺寸优化提供参考。
在国外学者关于踝关节康复仪器的研究方面,Rosado 等[25-26]提出了一种用于双踝关节康复训练的被动康复机构,利用伺服电机对实验平台进行控制,并自行设置轨迹参数,最终实现了良好的康复功效;Jamwal等[27]主要针对以中风患者为代表的神经功能紊乱患者提出了一种利用气动肌肉执行机构作为驱动的并联踝关节康复机构,通过患者的实际反馈数据对控制器性能参数进行优化;Erdogan 等[28]设计了一种并联式外骨骼机构,可根据实际需求对机构部件进行重组,满足紧凑及低惯量的结构设计要求;Simnofske 等[29]、Kumar 等[30]设计了一种适用于踝关节的主动康复机构,该机构有3个旋转运动状态,实现了对踝关节进行多自由度的康复控制;Jamwal 等[31]通过模糊逻辑控制装置实现了踝部的康复训练功能,该装置可及时采集当下患者的康复数据。
根据上述踝关节康复机构的研究成果可知,国内外现有课题主要集中于固定式并联踝关节康复仪器的设计方面,其设计结构具有多元化与创新性,但康复装置仍存在以下问题:① 大多为固定大型仪器,仅适合在实验室、康复医院等环境中使用,不适用于居家使用;② 在设计上多为功能化设计,针对可应用于工业产品化的设计关注较少;③ 大型实验设备成本较高,且不具有灵活性与便携性。
结合国内外康复机构研究现状可知,目前可自主移动的便携式踝部康复机构设计较为匮乏,为解决固定式康复设备笨重且不具有普及性的问题,本研究设计出一种可供踝关节康复训练的智能轮椅。该轮椅在传统轮椅的基础上进行结构优化,实现了多功能集成化,具有操作简单、控制精度高、性能稳定、康复效果显著等优势。
但本文所设计的可供踝关节康复训练的智能轮椅尚存在以下不足:① 目前产品可实现预期设定相关功能,但临床试验的相关案例较少,后续可根据临床试验的数据反馈对产品结构和性能进行进一步优化;② 由于目前所搭建的设备为初代样机,康复机构相关零件由工厂定制加工、组装制成,局部结构存在与人体腿部曲线不贴合的现象,后期零件加工过程中可对相关结构尺寸进行改良;③ 产品样机目前缺乏实体企业的考核与评价,后续是否能够产业化生产尚缺少企业支撑。
除此之外,在大数据时代的背景下,多元化的智能技术为现代护理学提供了极大的技术支持,国外学者康复轮椅的研究成果也主要体现在实时监控、信息交互等方面,这些研究课题可作为未来产品迭代升级的主要方向。在未来产品升级的过程中,本产品可设计搭载高清摄像头以实现互联网实时监控,并增添通信、康复信息联网等功能,便于患者在紧急情况下进行通讯与健康状况监测,以符合当下数字化产品的发展趋势。
5 结论
综上所述,本文结合目前国内现有轮椅进行结构优化,设计出可供术后患者、脑血栓患者和下肢残疾人士等下肢功能障碍人群进行踝关节康复的智能辅助轮椅,搭配STM32F103单片机设计控制电路,可满足行走、升降、智能辅助等功能,提升了用户的实际体验感。此外,本文基于CATIA软件建立三维模型,结合软件进行动力学和静力学仿真分析,并结合实体样机测试验证了产品的安全性与可行性。在未来产品迭代升级中,可增添通信、信息传输、实时监控等功能模块,以完善产品对数字智能化的需求。由于目前市面上踝关节康复式智能轮椅设计较少,本研究具有良好的应用前景,可为业内康复轮椅的后续发展提供参考。
