超特长隧洞TBM智能辅助掘进技术研究及应用
2024-05-07谭忠盛邓铭江
谭忠盛, 邓铭江
(1. 城市地下工程教育部重点实验室(北京交通大学), 北京 100044;2. 新疆水利发展投资(集团)有限公司, 新疆 乌鲁木齐 830000)
0 引言
全断面硬岩隧洞掘进机(TBM)工法具有掘进速度快、施工扰动小、成洞质量高、综合经济社会效益高、安全环保等优势,被越来越多隧洞施工所采用。由于国内劳动力成本的增加和国产TBM的成功应用,TBM法与钻爆法的施工成本差距逐渐减小,进一步促进了TBM法的推广。据估算,未来10年内我国可用TBM施工的隧洞规模超6 000 km[1-3]。
然而,目前TBM掘进仍较多依赖于司机操作,掘进参数受司机主观因素影响,当围岩条件变化频繁或稳定性较差时,由于掘进过程中无法直接观察掌子面,司机难以对异常情况做出及时响应,导致掘进速度减缓或刀具磨损加剧,甚至造成塌方、卡机、埋机等严重后果。例如: 巴基斯坦的Neelum-Jhelum引水隧洞TBM在高强度、高磨蚀性围岩中滚刀磨损巨大,利用率低,导致工期延误,加之掘进参数选取不合适,掘进总成本增加至6亿加元以上[4]; 印度的Dul Hasti水电工程引水隧洞,由于施工人员对围岩条件认识不清,导致掘进参数与岩体条件不匹配,卡机时间长达8个月,最终历经12年才得以建成[5]。
解决上述问题的途径在于提高TBM自动化、信息化、智能化水平。经过半个多世纪的发展,大量TBM法隧洞成功建成,积累了大量的施工数据,随着人工智能技术的高速发展,开展了大量智能掘进方面的探索。智能掘进是借助物联网、大数据、云计算等新技术,实现围岩实时感知、多源信息统合、掘进参数优化、施工策略制定等功能,最终形成高度智能化的隧洞掘进技术体系。
2022年,中华人民共和国住房和城乡建设部印发《“十四五”建筑业发展规划》,其中明确要求加快智能建造与新型建筑工业化协同发展。在政策引领和内在需求双重驱动下,TBM隧洞智能掘进技术成为了当前研究的热点。Min等[6]依托仁川公路隧洞,开发了以工期最短、成本最低为优化目标的隧洞施工辅助决策工具,并实现了TBM隧洞建设工序规划及资源分配。Sun等[7]将TBM系统分解为多个子系统建立分析模型,研究了操作参数、设计参数及围岩参数对于掘进效能的影响规律,提出了新的掘进策略。张娜等[8]通过分析岩体状态参数与TBM掘进参数的相关关系,采用数据挖掘的方法建立岩机信息感知互馈模型,并以此为基础构建智能决策控制体系。赵光祖[9]基于大量现场实测数据,通过人工神经网络构建了TBM性能预测模型,并以掘进成本最低为目标,对推力、刀盘转矩等参数进行了优化。与此同时,部分TBM智能控制系统已初步应用于工程实践。例如: 马来西亚隧洞培训学院采用比例积分控制算法与数百个传感器,开发了可以自主推进、转向、注浆的TBM智能化控制系统; 中铁工程装备集团有限公司开发的TBM掘进智能控制系统可以通过实时获取围岩信息与TBM掘进状态对贯入度与刀盘转速等参数进行调整[10]。国内一些施工单位以及高校也主持或参与了以智能掘进与控制为核心的研发课题,并取得了重要进展。
可以看出,目前TBM智能化的研究已经在掘进参数优化和智能控制方面迈出了第一步,但依然存在2个难题,一是如何在不停机的状态下及时准确获取掌子面围岩信息,二是如何在了解掌子面围岩信息的情况下实现智能辅助决策。突破以上难题,对提高TBM隧洞掘进智能化水平,实现安全、高效施工具有十分重要的意义。本文依托目前在建的北疆供水二期工程对TBM隧洞智能辅助掘进技术开展研究,以掘进数据为支撑,明确智能掘进技术的目标,提出智能掘进技术体系架构、关键理论及技术方案,并通过工程应用验证智能辅助掘进技术的效果。
1 工程概况
北疆供水二期工程全长540 km,分为XE隧洞(洞径7.8 m)、KS隧洞(洞径7.0 m)和SS隧洞(洞径5.5 m)3段,采用18台敞开式TBM分段掘进,各分段隧洞概况如表1所示。其中,单机最长掘进26 km,最大埋深700 m,隧洞岩性以华力西晚期侵入岩为主,岩石单轴饱和抗压强度最大为215 MPa,石英质量分数最高达56%,隧洞围岩条件总体较好。各隧洞设计围岩类别占比如图1所示。
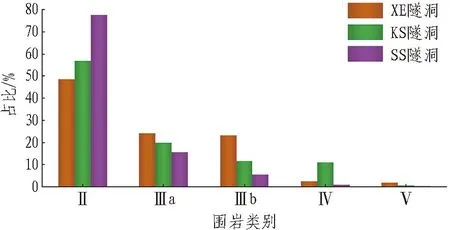
图1 各隧洞设计围岩类别占比

表1 各分段隧洞概况
截至2023年10月31日,主洞18台TBM累计掘进约350.0 km,超过总长度的91%。其中,TBM4、TBM6、TBM7、TBM9、TBM10、TBM11、TBM12、TBM16、TBM17进度最快,已完成所有洞段掘进任务,分别累计掘进21 325、20 840、20 798、23 624、17 491、17 670、17 923、19 116、20 545 m,如图2所示。TBM平均日进尺为12.4 m,其中7台设备日进尺超过14 m。TBM17主要在Ⅱ类和Ⅲa类围岩中掘进,日进尺最大达到19.97 m。
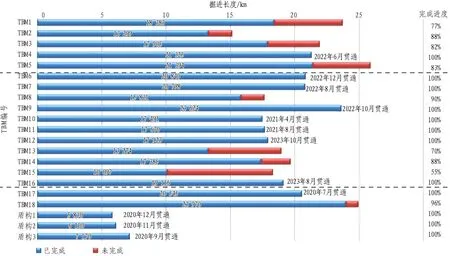
图2 TBM集群施工进度情况(截至2023年10月31日)
2 实测掘进指标统计分析
2.1 围岩类别
主洞18台TBM勘察设计阶段给出的不同类别围岩占比与实际揭露的围岩占比情况如图3—7所示,围岩类别按照GB 50487—2008《水利水电工程地质勘察规范》进行划分。由分析可知,各TBM在掘进过程中揭露的围岩条件与勘察结果相同的段落长度仅占掘进总长的51%,且围岩条件越差,勘察准确率越低。定义围岩符合率为勘察设计阶段与实际揭露围岩类别一致的段落长度与二者中该类围岩长度最大值之比,则Ⅱ类、Ⅲa类、Ⅲb类、Ⅳ类、Ⅴ类围岩的符合率分别为63%、42%、37%、35%、22%。
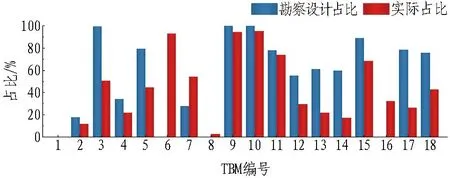
图3 Ⅱ类围岩占比
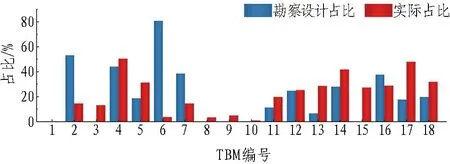
图4 Ⅲa类围岩占比
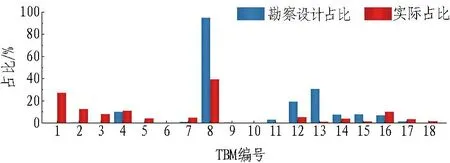
图6 Ⅳ类围岩占比
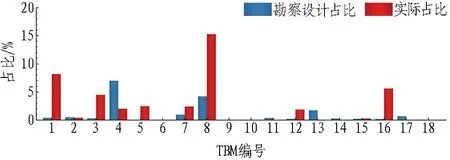
图7 Ⅴ类围岩占比
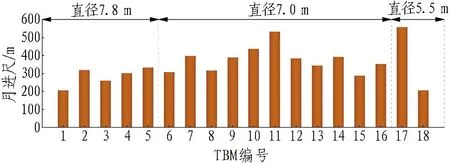
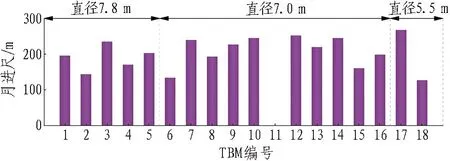
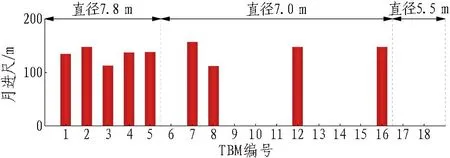
2.2 掘进效能
XE、KS、SS隧洞各台TBM掘进的平均月进尺和累计每延米换刀数统计结果分别如图8—12所示。各类围岩下掘进效能统计见表2。其中,Ⅱ、Ⅲa类围岩不需要进行支护,而Ⅲb—Ⅴ类围岩中支护施作占用了一定时间。由此可以看出,多数设备平均月进尺较为接近,但极差较大,TBM17在各类围岩中的掘进效率均为最快,月进尺约为TBM18的2倍。此外,各设备在掘进经济性方面差异显著,以Ⅱ类围岩为例,TBM8每延米换刀数最少,仅为0.031把,而TBM3每延米换刀数则达到0.486,刀具损耗成本相差高达15倍,这是由围岩岩性、刀具质量、设备刀盘设计和加工质量、司机操作等多方面因素造成的。
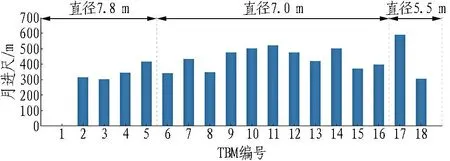
(a) 平均月进尺
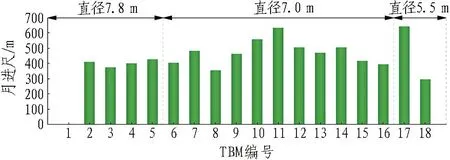
(a) 平均月进尺
(a) 平均月进尺
(a) 平均月进尺
(a) 平均月进尺
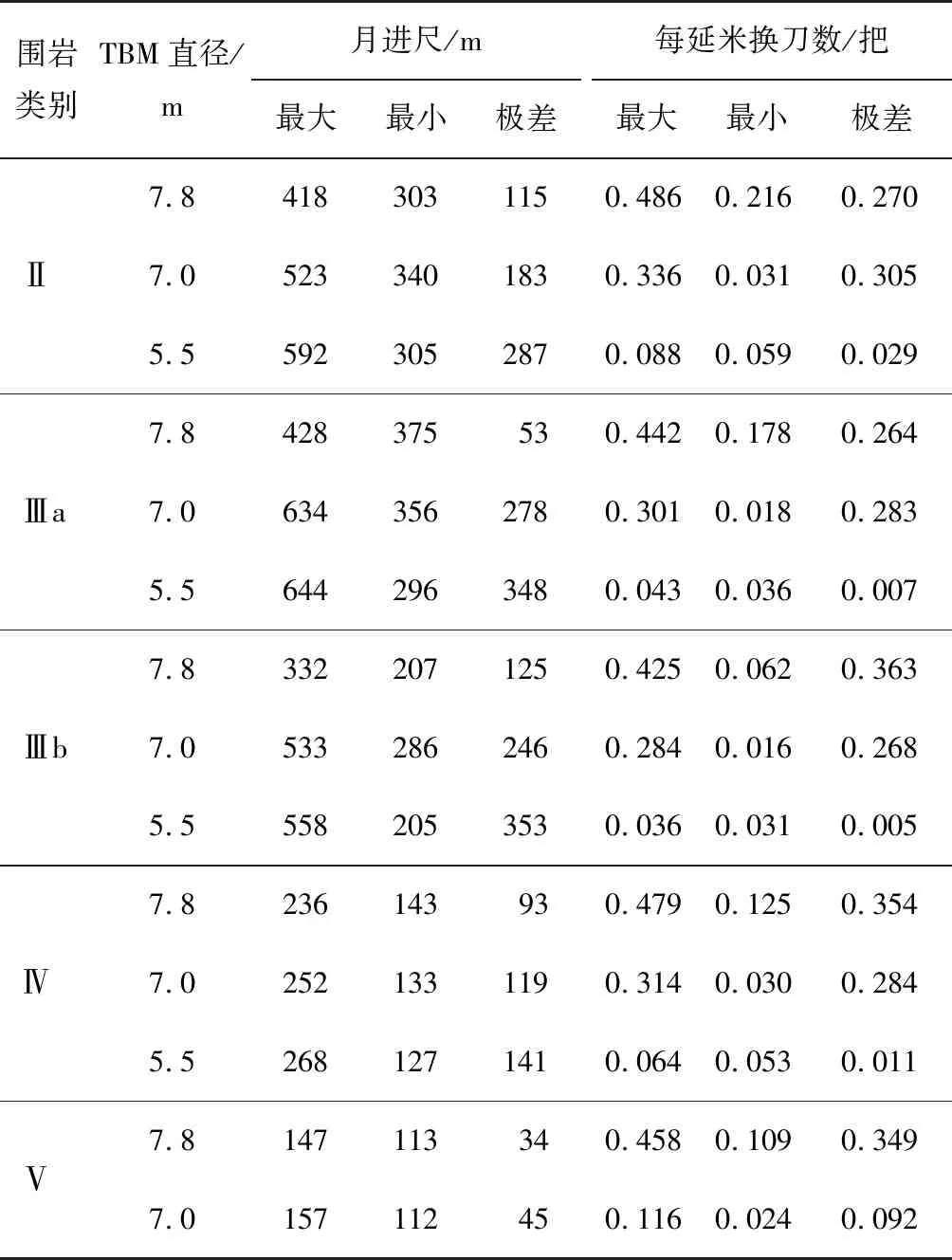
表2 掘进效能统计结果
2.3 掘进参数
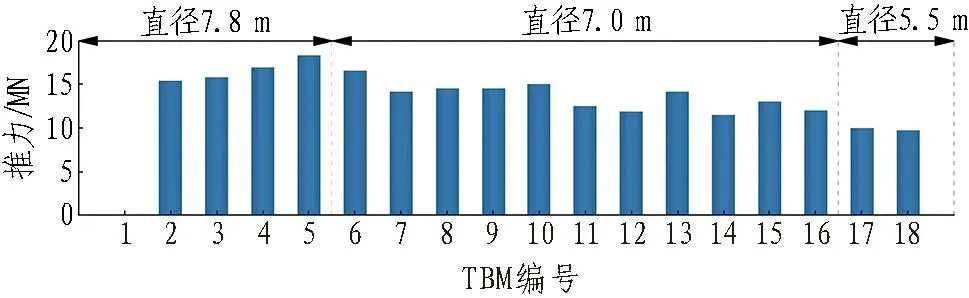
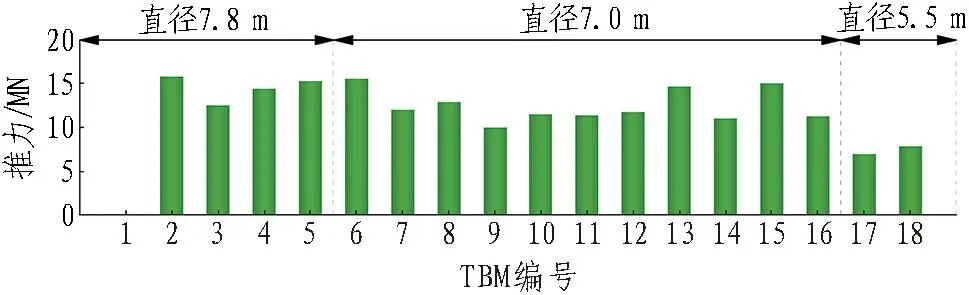
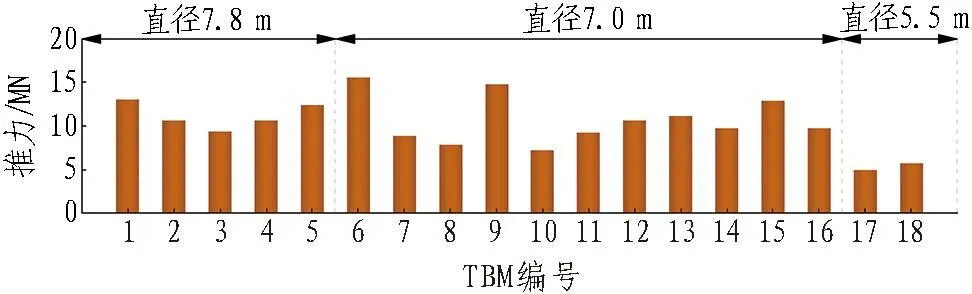
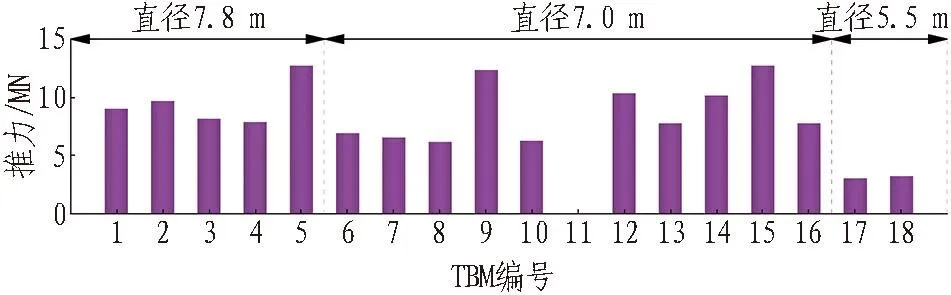
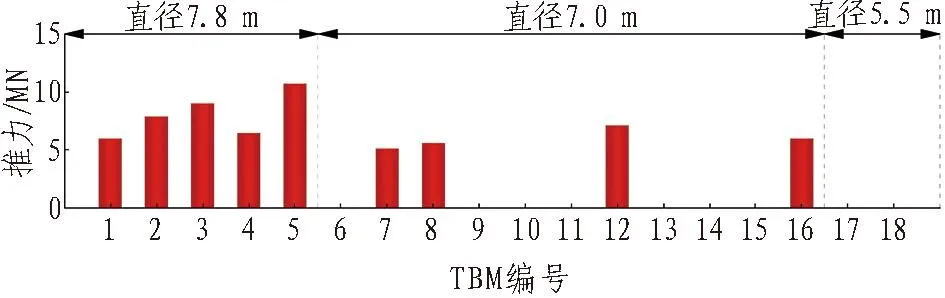
XE、KS、SS隧洞掘进参数均值的柱状图如图13—17所示,统计结果如表3所示。由此可以看出,即使在同类围岩中,由于岩性、抗压强度、司机经验等多方面原因,各台TBM所采用的推力、刀盘转矩和贯入度也存在较大差异。
(a) 推力
(a) 推力
(a) 推力
(a) 推力
(a) 推力
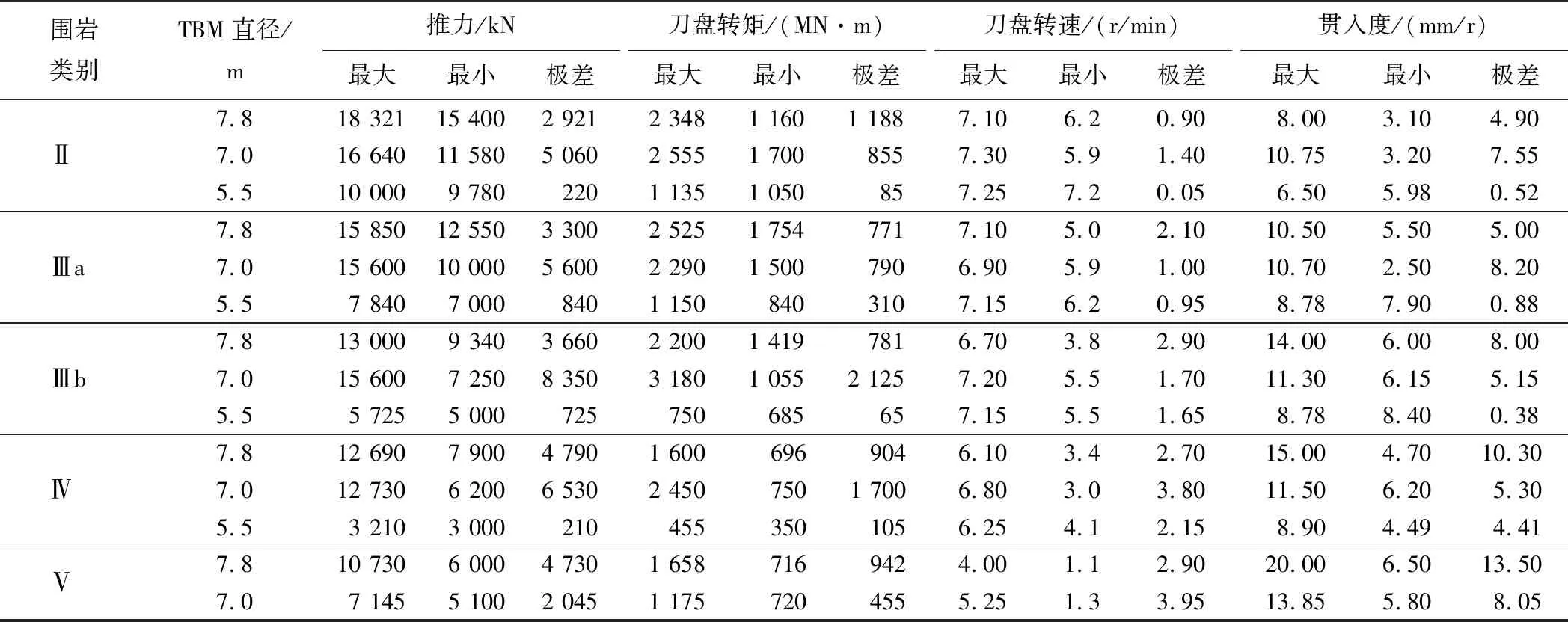
表3 掘进参数统计结果
Ⅱ类围岩中,推力的极差为5.06 MN,相当于同类围岩中最大值的30%;刀盘转矩极差为1.19 MN·m,相当于最大值的51%;刀盘转速极差为1.4 r/min,相当于最大值的19%;贯入度极差为7.55 mm/r,相当于最大值的70%。
Ⅲa类围岩中,推力的极差为5.60 MN,相当于同类围岩中最大值的36%;刀盘转矩极差为0.79 MN·m,相当于最大值的34%;刀盘转速极差为2.1 r/min,相当于最大值的30%;贯入度极差为8.2 mm/r,相当于最大值的76%。
Ⅲb类围岩中,推力的极差为8.35 MN,相当于同类围岩中最大值的54%;刀盘转矩极差为2.13 MN·m,相当于最大值的67%;刀盘转速极差为2.9 r/min,相当于最大值的43%;贯入度极差为8.0 mm/r,相当于最大值的57%。
Ⅳ类围岩中,推力的极差为6.53 MN,相当于同类围岩中最大值的51%;刀盘转矩极差为1.70 MN·m,相当于最大值的69%;刀盘转速极差为3.8 r/min,相当于最大值的56%;贯入度极差为10.3 mm/r,相当于最大值的69%。
Ⅴ类围岩中,推力的极差为4.73 MN,相当于同类围岩中最大值的44%;刀盘转矩极差为0.94 MN·m,相当于最大值的57%;刀盘转速极差为3.95 r/min,相当于最大值的75%;贯入度极差为13.5 mm/r,相当于最大值的68%。
整体而言,推力和刀盘转矩的最大极差都出现在Ⅲb类围岩中,这可能是因为Ⅲb类围岩包含的围岩强度和完整性范围跨度较大,从而导致推力和刀盘转矩表现出显著差异;而刀盘转速和贯入度的最大极差都出现在Ⅴ类围岩中,这可能是由于Ⅴ类围岩条件较差,掌子面不稳定容易发生局部或整体垮塌,进而造成刀盘局部或整体脱空,导致贯入度变化较大,而掌子面的不稳定性也会造成出渣需求出现较大差异,进而导致刀盘转速变化较大。
综上所述,根据18台TBM的掘进经验可以看出,对于相同的设备和地质条件,不同的施工队伍、不同的TBM司机,在不同的时间段,掘进效能也可能存在明显差异,尤其是刀具损耗成本相差很大。主要原因是施工人员对复杂多变的地质环境、地质信息认知缺乏,存在大量地质信息感知盲区,且即使是相同的围岩类别围岩条件也存在一定差别。此外,还存在操作人员主观因素的影响,对于特定的地质环境掘进状态无法做到及时调整,对掘进参数的选择存在一定的盲目性和随机性。
3 TBM隧洞智能辅助掘进系统总体架构
TBM隧洞智能辅助掘进系统总体架构如图18所示,其主要包含以下部分:
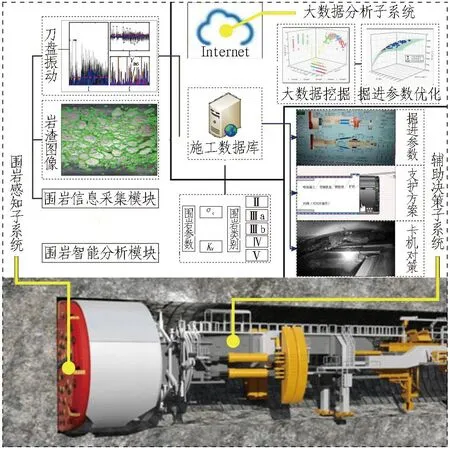
σc为岩石单轴抗压强度; Kv为岩体完整性系数。
1)围岩感知子系统。围岩感知子系统负责在掘进过程中准确识别掌子面前方围岩信息,使TBM可以及时根据前方地质变化调整掘进策略。围岩感知子系统主要包含围岩信息采集模块和围岩智能分析模块。
2)大数据分析子系统。大数据分析子系统负责对TBM掘进过程中产生的海量数据进行存储、管理、挖掘和利用,主要包括施工数据库模块、大数据挖掘模块和掘进参数智能优化模块。
3)辅助决策子系统。辅助决策子系统负责将大数据分析子系统挖掘出的不同地质条件的最优掘进参数提供给操作人员,并根据围岩感知结果分析围岩稳定性,预测卡机的可能性,提供支护方案及卡机应对措施。辅助决策子系统主要包括掘进参数选择模块、支护方案模块和卡机对策模块。
4 TBM掘进过程围岩感知
快速、准确认知TBM掘进时掌子面围岩信息是实现TBM安全高效掘进的前提。现有的认知途径主要包括前期的工程地质勘探和掘进期间的超前地质预报,但目前这2种方法很难做到精准预测,且即时性较差,满足不了智能掘进对地质信息的高标准要求,因此TBM掘进过程中围岩感知十分重要。
4.1 基于岩渣图像识别的围岩感知技术
岩渣形态与围岩特性和掘进参数密切相关,因此可利用岩渣中携带的信息对掌子面围岩条件进行分析。传统上采用筛分法获取岩渣级配,费时费工,难以满足TBM掘进过程中对围岩信息实时性的要求。因此,引入图像识别技术克服以上问题,其可在掘进过程中对岩渣进行快速、实时、非接触式分析。
岩渣图像识别技术主要包括图像采集和智能分析2大步骤。
4.1.1 岩渣图像采集方法
为快速采集岩渣图像信息,在皮带输送机的接力驱动机构前方支架上设置渣片拍照系统。该系统通过工业级线阵相机和伺服控制系统,有效解决高速物体拍摄时的运动模糊问题,可在TBM施工的严苛环境中实时拍摄高清晰岩渣图像,并通过无线通信模块将图像传输至设置于TBM主控室的上位机进行存储和处理。伺服控制系统的作用是: 根据测速轮传来的脉冲信号计算皮带机的运行速度,判断TBM是否处于掘进状态;在闲置时间关闭拍照箱电源,以节约电能并延长设备寿命; 另外,根据运行速度实时调节线阵相机的行频,保证拼接后的图像不会在垂直扫描线的方向上被拉长或压缩。岩渣图像采集设备如图19所示。
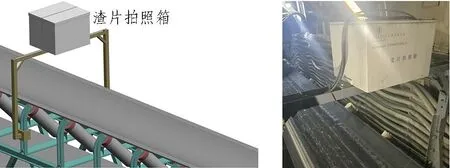
(a) 布置方式 (b) 现场照片
4.1.2 岩渣图像智能分析算法
岩渣图像智能分析算法的作用是建立岩渣图像与围岩信息(围岩物理力学参数、完整程度、围岩类别)之间的映射模型。岩渣图像感知模型建立过程如图20所示,具体如下:
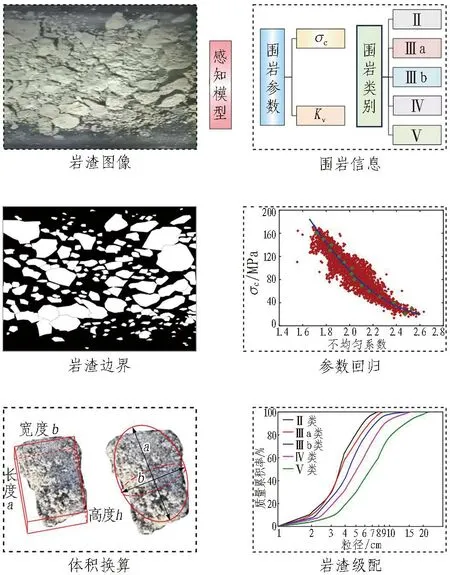
图20 岩渣图像感知模型建立过程
1)岩渣边界识别。岩渣边界识别的核心问题是将岩渣(图像主体)与皮带(图像背景)分离。采用先进的深度神经网络架构和优化技术,精确识别岩渣区域及边界。通过2阶段训练策略,提高了模型的泛化能力。
2)岩渣几何参数获取。设计了高效的岩渣实例分割算法,支持岩渣几何参数(面积、周长、圆度、长细比、等代体积)的自动计算及统计。
3)围岩图像感知模型训练。通过现场数据构建岩渣参数与围岩物理力学参数、类别参数间的映射关系,建立围岩图像感知模型并进行训练,从而完成“岩渣图像—岩渣边界—岩渣参数—围岩参数—围岩类别”的闭环映射关系,实现围岩特征的智能、实时感知。
4.2 基于刀盘及主机振动监测的围岩感知技术
TBM破岩主要是通过刀具对围岩施加楔入和挤压作用,诱发围岩表层产生局部脆性张拉裂纹以实现分离围岩的效果[11]。在围岩产生张拉裂缝直至崩落的过程中,由刀具挤压作用所积累的应变能将以极高的速率释放,产生作用于刀具上的应力波。这一应力波的频谱特性与围岩破裂时的能量释放特性有关,因此也与围岩的强度、刚度、脆性等固有属性密切相关,这为通过TBM机械振动特性预测围岩条件提供了可能。基于刀盘及主机振动监测的围岩感知也可在不干扰TBM正常掘进的前提下实时、自动获取围岩信息,适合与岩渣图像识别技术互为补充和印证。
4.2.1 刀盘及主机振动采集系统
刀盘及主机振动采集系统主要由振动加速度传感器、数据采集仪以及数据分析系统3部分构成。为降低工人活动产生的干扰,加速度传感器设置于刀盘、盾尾、主梁和撑靴等位置,如图21所示。
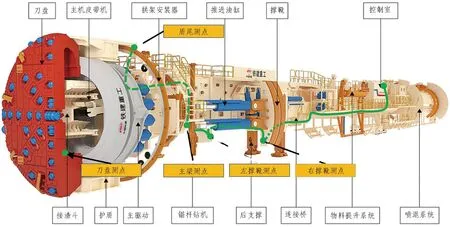
图21 刀盘及主机振动采集系统
4.2.2 刀盘及主机振动智能分析算法
刀盘及主机振动感知模型建立过程如图22所示,具体如下:
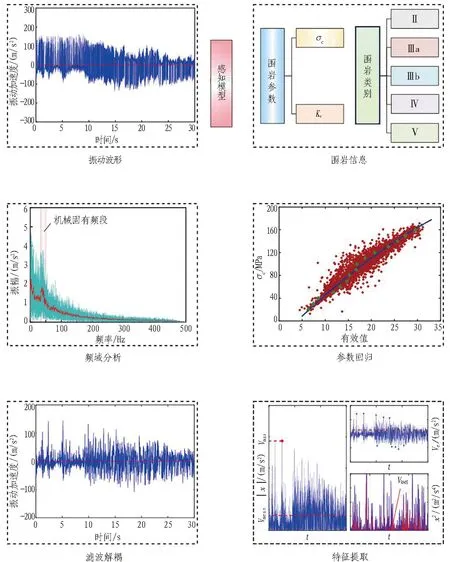
Vmax、Vmean、Ve、VRMS分别为振动加速度峰值、平均幅值、平均极值、有效值。
1)振动信号滤波降噪。围岩破碎产生的应力波经刀具、刀盘等介质传导至TBM机体内部的过程中,会混入机械运转产生的固有振动。这一部分振动主要取决于TBM刀盘驱动的输出功率,对于以分析围岩条件为目标的智能算法而言是信号中的噪音。由于TBM机械固有振动为平稳信号,故可在相同刀盘驱动输出功率的条件下,取多段刀盘振动波片段进行傅里叶变换,寻找其频谱特性高度相似的频段即为TBM机械固有振动的主频段。通过均衡器抑制该频段后,即可得到与围岩类别存在明显相关性的原始振动波形。
2)振动信号时频分析及特征提取。在刀具的连续旋转挤压作用下,围岩表面的“表层挤碎—裂纹发展—裂纹贯通—岩片崩落”过程不断循环发生。这一过程中围岩的能量释放是非均匀、非连续的,且受诸多随机因素影响。因此,破岩产生的振动信号是非平稳的,需要借助小波变换进行时频分析,确定表征围岩破裂过程的频带,提取该频带上的振幅峰值、能量分布等局部特征。
3)模型训练。以提取到的特征指标及对应的围岩参数作为训练样本对模型进行训练,建立“振动波形—振动时频谱—振动特征—围岩参数—围岩类别”的映射关系。
5 TBM掘进数据库建立及大数据分析
5.1 TBM掘进数据库建立
TBM掘进施工过程中,控制系统会全方位监控机器的运行状态,包括总推力、掘进速度、贯入度、油缸行程、油缸压力等。此外,围岩智能感知系统捕获的多源信息可能以图像、视频、波形等形式存在,形成了海量数据。为揭示数据中蕴藏的相关关系、提取有用的掘进信息,需建立TBM掘进数据库。TBM掘进数据库存储的数据主要有地质及围岩情况、掘进参数、掘进日报、岩渣图像、振动时程曲线、TBM设备参数、支护方案、工程基础信息等,其概念结构E-R(实体-联系)模型如图23所示。
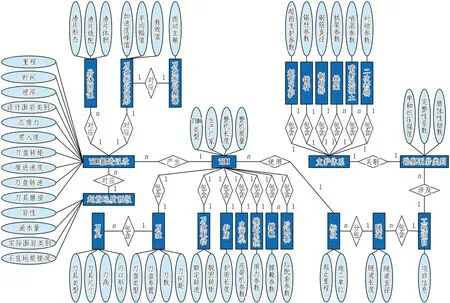
图23 TBM掘进数据库E-R模型
5.2 掘进数据预处理
由于TBM工作时产生的数据量很大,难免有非正常的数据混杂在正常工作状态的数据中,干扰分析结果,所以分析前应对数据进行预处理,以保证分析结果的正确性和可靠性。数据的过滤主要分为3步,分别为非掘进状态数据过滤、非稳定掘进状态数据过滤和异常数据过滤。
非掘进状态包括撑靴换步、支护延误、正常维保、刀具检修、异常故障等状态。异常状态参数过滤采用的判别函数如下:
(1)
G=g(F)·g(r)·g(T)·g(p)
。
(2)
式中:G为TBM掘进状态判别值,G=1代表掘进状态,G=0代表非掘进状态;F为推力;r为刀盘转速;T为刀盘转矩;p为刀具贯入度。
通过统计掘进数据发现,在TBM一次完整掘进过程中,推力上升阶段为50~100 s,停机之前的推力下降阶段为30~200 s,这2阶段的掘进参数急剧变化,数据并不具有代表性,也需进行滤除。
剔除非掘进状态和非稳定掘进状态数据后,对掘进参数进行归一化,利用拉依达准则(3σ准则)对正式掘进阶段异常数据进行过滤,最终得到可用于分析的数据。
5.3 掘进数据关联分析
基于数据库数据,可研究掘进参数与围岩参数的映射关系。分别采用线性、对数、逆、二次、幂、复合、S、增长和指数等多种模型对各地质参数与掘进参数的关系进行回归,模型公式如式(3)所示。采用决定系数(R2)评价各回归公式的优劣,选择回归效果最优的模型建立回归公式。决定系数计算方法如式(3)所示:
(3)

5.4 高效掘进参数范围分析
分析前期人工控制掘进过程中的宝贵经验,可为掘进方式的改进提供指导。对此,首先将数据库中的样本按照围岩类别分组,然后以平均单刀破岩量100 m3/把为分段区间,分别把各类围岩内的样本数据进行分组,从而保证了各组内的岩体条件近似一致。选取各组中掘进速度大于一定分位数的数据作为掘进特征样本点,如图24所示。
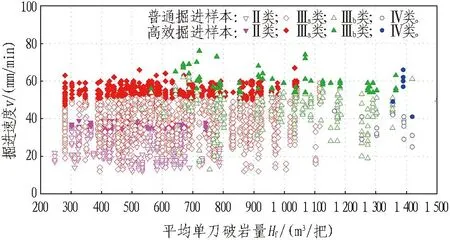
图24 高效掘进样本点示意图
分别绘制各类围岩条件下掘进特征样本点对应总推力和刀盘转速的分布直方图,同时绘制正态分布拟合曲线,如图25所示(以Ⅱ类围岩为例)。分别取上、下侧0.875分位数作为建议取值区间的最小值和最大值,计算人工经验控制下不同类别围岩高效掘进参数的取值区间。
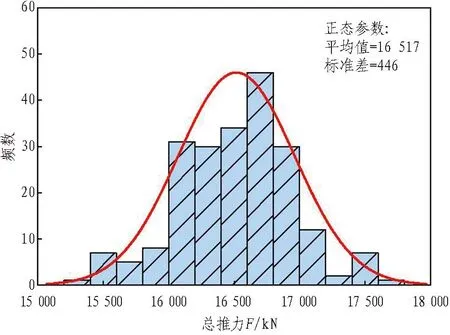
(a) 总推力
6 TBM隧洞掘进参数优化
智能优化算法的目标是根据施工数据中提炼出的规律,寻找各种情况(不同地质条件、TBM直径、TBM类型等)下的最优掘进参数和支护参数,并随着TBM掘进不断基于新采集的数据样本进行结论验证和增量学习,为智能辅助决策系统建立知识库。
6.1 多目标智能优化算法
TBM智能掘进技术的最终目标是为司机提供能使掘进效能最大化的掘进参数,这本质上是一个多目标优化问题。多目标优化问题的目标之间通常具有不可公度性和矛盾性,当目标函数处于冲突状态时,不存在使所有目标函数同时达到最大值或最小值的最优解,只能寻求一个非劣解的集合,即Pareto最优集。Pareto最优集在目标函数空间中的像即为Pareto前沿,如图26所示。
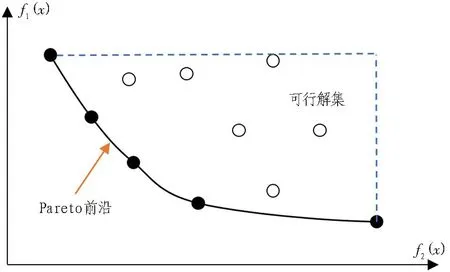
图26 多目标最优化问题中的Pareto前沿
鉴于传统的数学规划方法在求解多目标优化问题时计算较为复杂且效果欠佳,Coello等[12]在Eberhart等[13]的粒子群算法(PSO)的基础上提出了多目标粒子群(MOPSO)算法。算法流程见图27。
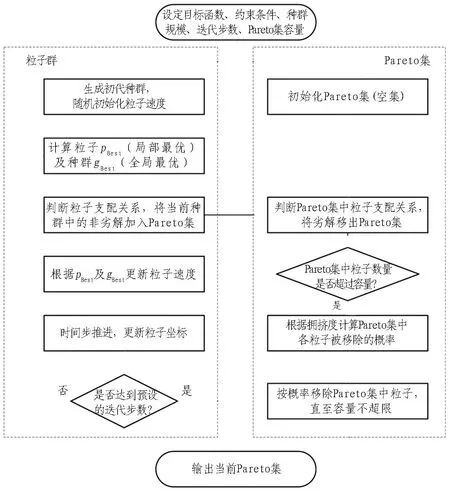
图27 多目标粒子群(MOPSO)算法流程图
6.2 掘进效能优化模型
6.2.1 设计变量
设计变量是影响目标函数中的可变参数。综合考虑围岩参数和掘进参数对掘进效能的影响,选择岩石单轴抗压强度σc、岩体完整性系数Kv、岩石石英质量分数q、总推力F、刀盘转速r5个参数作为TBM掘进参数辅助决策问题的设计变量。
6.2.2 目标函数
建立目标函数首先要实现对掘进效能的准确预测,基于国内外既有研究成果[14-15],考虑围岩参数及掘进参数对掘进速度及平均单刀破岩量的影响,建立掘进速度及平均单刀破岩量预测模型,如式(4)—(5)所示。
(4)
Hf=β0·σcβ1·Kvβ2·qβ3·Fβ4·rβ5。
(5)
式(4)—(5)中:v为掘进速度,mm/min;Hf为平均单刀破岩量,m3/把;N为刀具数量;q为石英质量分数,%;αi、βj(i=0,1,2,3;j=0,1,2,3,4,5)为待定系数。
基于掘进速度及平均单刀破岩量预测模型,以“高效率、低成本”为目标的TBM掘进效能优化模型可表达为式(6)。
(6)
约束条件:x∈X,X⊆R2。
式中:X为约束集;Vmin代表向量极小化,即目标向量函数f(x)中各子函数均达到极小值。
7 TBM隧洞掘进辅助决策
7.1 辅助决策流程
TBM隧洞掘进辅助决策系统的工作流程如图28所示。基于围岩感知及超前地质预报等得到的地质信息,辅助决策系统为司机提供不同掘进模式下优选的掘进参数和适合的支护措施,司机结合机械状况、工程经验、工期要求等对掘进模式和支护措施进行决策。根据掌子面围岩的感知结果,辅助决策系统还能对卡机的可能性进行预测,并提供相应的应对措施。
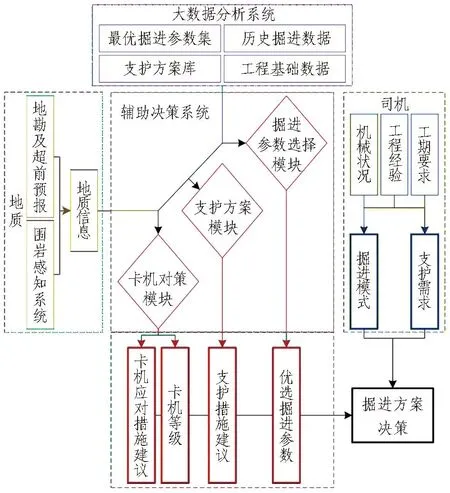
图28 TBM隧洞掘进辅助决策系统工作流程
7.2 掘进模式及参数
TBM最优掘进参数决策是一个复杂的多目标、多元优化问题。由掘进效能优化模型的目标函数可以看出,掘进速度与平均单刀破岩量为负相关,提升掘进速度会降低平均单刀破岩量,反之亦然。根据多目标优化理论,Pareto最优集中的元素代表在效率和经济性之间作出了一定权衡下所能达到的最大掘进效能和对应的最优掘进参数。在实际掘进过程中,司机的掘进策略可能会随着工程进度和成本的实际情况而改变,过度追求掘进速度最大化或刀具磨损最少有时不能满足实际需要。因此,定义以下3种掘进模式。
1)高效掘进模式: 最大化掘进速度,接受一定程度的刀具寿命损失。
2)节能掘进模式: 确保掘进速度满足要求的同时,尽可能减少刀具磨损,使综合效能最大化。
3)经济掘进模式: 尽可能减少刀盘磨损,适当放缓掘进速度。
3种掘进模式对应的掘进效能区间如图29所示。图中红色散点代表经模型优化后得到的Pareto集。各掘进模式对应的掘进参数范围即为落入区间的Pareto边界点坐标。
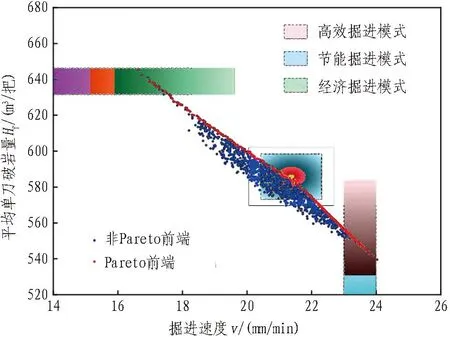
图29 3种掘进模式对应的掘进效能区间
8 工程应用
8.1 系统开发
基于本文中的围岩感知、参数优化和辅助决策等方法开发了TBM智能辅助掘进系统,系统界面如图30所示。系统采用模块化图形用户界面,可通过岩渣图像、刀盘及主机振动识别围岩类别、强度、破碎程度,进行施工数据存储、管理、挖掘和利用,并进一步分析围岩稳定性,提供最优掘进参数和支护方案,预测卡机情况。系统可提供Web用户界面,支持多种主流操作系统和用户终端接入。
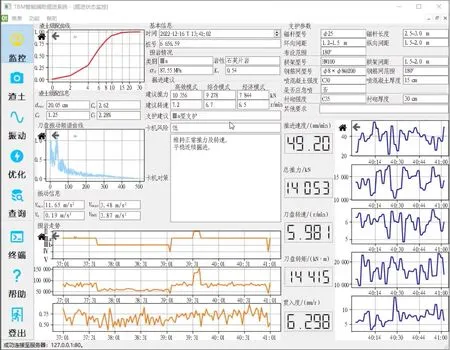
dmax为最大粒径; Cu为不均匀系数; Cc为曲率系数; CI为粗糙度指数。
8.2 试验段设置
为验证TBM智能辅助掘进系统在实际掘进中的应用效果,在XE隧洞K136+980~+045分别设置Ⅱ、Ⅲa、Ⅲb和Ⅳ类围岩的对比试验段。该段位于剥蚀构造低山丘陵区,地形略起伏、开阔,隧洞埋深26~120 m,岩性为华力西期花岗岩,岩石中石英质量分数为25%~35%,岩石坚硬,较完整。为避免同类围岩中参数差异过大对试验结果产生干扰,各类围岩试验段均连续设置,其中一段由司机根据主观经验选取掘进参数,另一段由智能辅助掘进系统选取掘进参数。试验段设置见表4,试验方案流程如图31所示。
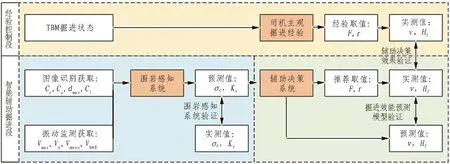
图31 试验方案流程
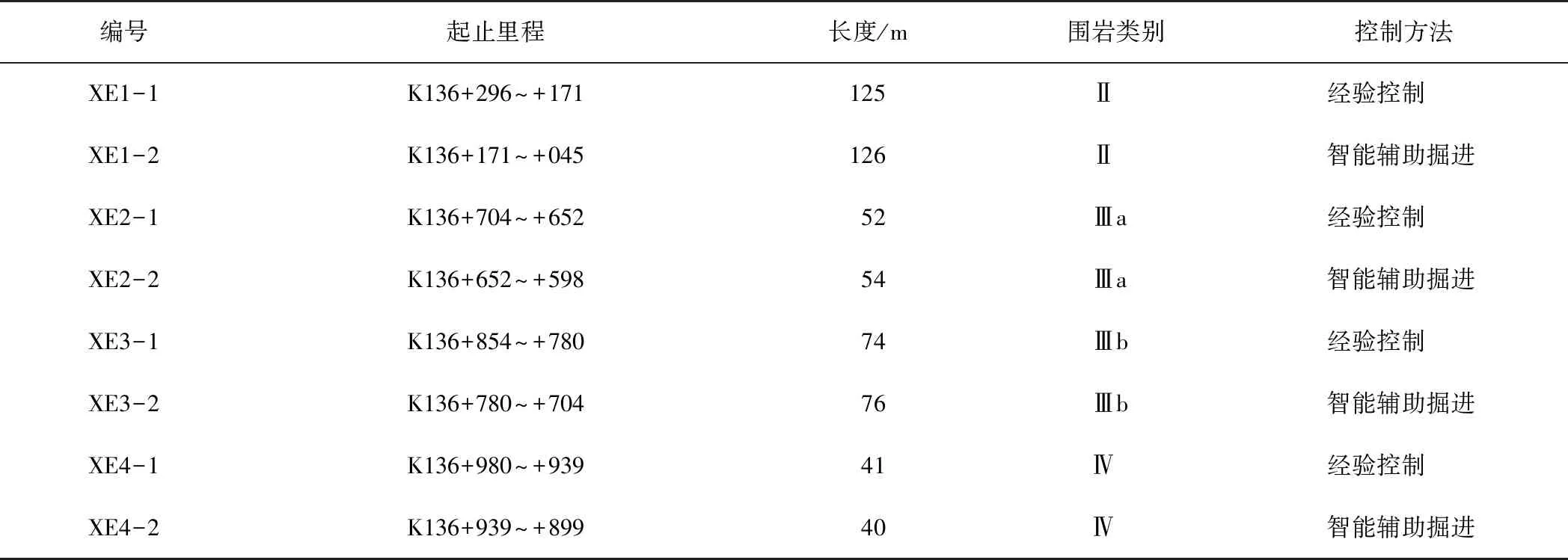
表4 试验段设置
8.3 围岩感知
通过试验段掘进过程中采集的岩渣图像和刀盘振动信息对前方围岩进行感知,引入曲率系数(Cc)、不均匀系数(Cu)、最大粒径(dmax)和粗糙度指数(CI)作为岩渣级配特征量化指标,振动加速度峰值(Vmax)、平均幅值(Vmean)、平均极值(Ve)、有效值(VRMS)作为刀盘振动量化定量指标。以上述指标为输入量,根据问题属性建立2个神经网络,其中一个为回归网络,输出量为岩石单轴抗压强度(σc)和岩体完整性系数(Kv); 另外一个为分类问题,输出量为围岩类别。神经网络结构如图32所示。神经网络建立完成后对参数进行优化。
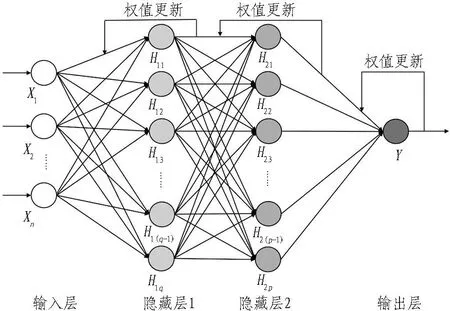
图32 围岩智能感知神经网络
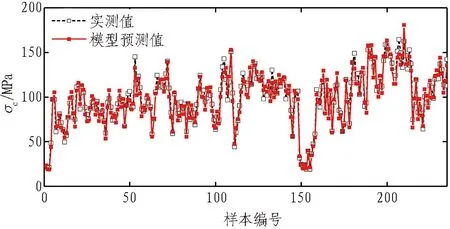
使用取自XE隧洞的独立测试样本对围岩智能感知模型的预测效果进行验证,模型预测值与实测值对比见图33。模型预测值均集中在实测值附近,无异常预测结果出现。预测的岩石单轴抗压强度均方根误差和平均绝对百分比误差分别为6.94和5.8%,预测的岩体完整性系数均方根误差和平均绝对百分比误差分别为0.04和5.9%,围岩类别预测准确率达93%,Kappa系数为0.85。可见,围岩智能感知模型可通过岩渣图像及刀盘振动实现对围岩参数较为准确的预测。
(a) 岩石单轴抗压强度
8.4 掘进参数优化及辅助决策
8.4.1 设计变量
依据前文分析,综合考虑围岩参数和掘进参数对掘进效能的影响,选择岩石单轴抗压强度σc、岩体完整性系数Kv、岩石石英质量分数q、总推力F、刀盘转速r共5个参数作为设计变量。
8.4.2 目标函数
基于参数间相关性分析结果,采用岭回归方法求解式(4)和式(5)中的未知系数。岩石单轴抗压强度、岩体完整性系数及石英质量分数与掘进速度的关系为负相关,设定边界条件为αi>0;岩石单轴抗压强度、岩体完整性系数、石英质量分数、总推力及刀盘转速与刀具寿命的关系为负相关,设定回归边界条件为βj<0。掘进速度预测模型及平均单刀破岩量模型参数回归结果分别见表5和表6。
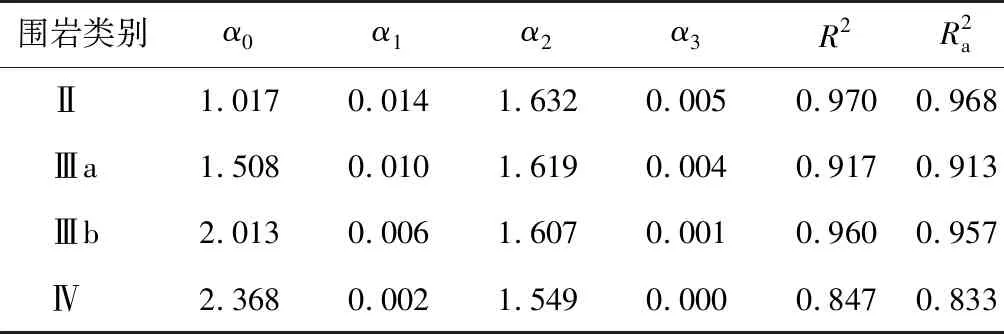
表5 掘进速度预测模型系数取值
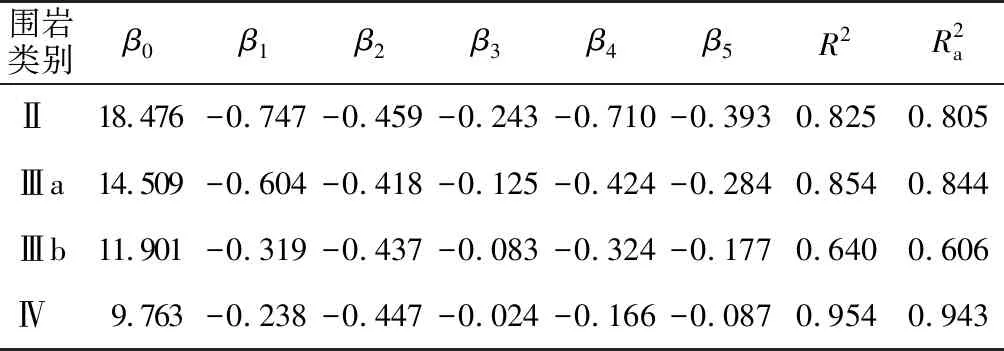
表6 平均单刀破岩量预测模型系数取值
8.4.3 约束条件
鉴于在相同围岩类别内掘进参数差别较小,在此区间内一般可满足正常掘进的需求,结合总体数据集的统计分析结果给出不同围岩类别条件下掘进参数的约束条件,如表7所示。
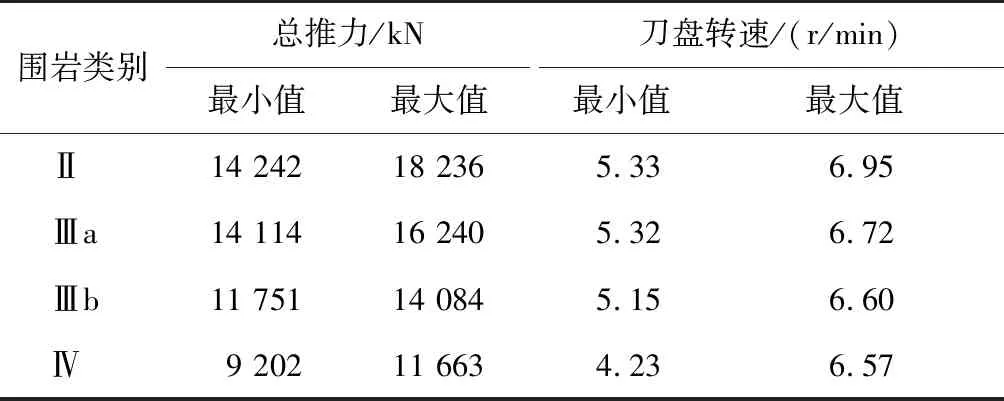
表7 掘进参数的约束条件
8.4.4 掘进参数辅助决策
分别对Ⅱ—Ⅳ类围岩应用掘进效能优化模型,并分别取Pareto集中掘进速度在前10%(对应于高效掘进模式)、掘进速度在其中位数两侧±5%(对应于节能掘进模式)和平均单刀破岩量在前10%(对应于经济掘进模式)元素对应的掘进参数,经统计后取其上、下侧15%分位数作为最优掘进参数区间。选择节能掘进模式进行掘进,掘进参数取值如表8所示。由表可以看出,经验控制段选取的掘进参数浮动较大,而智能辅助掘进系统给出的掘进参数更加稳定。
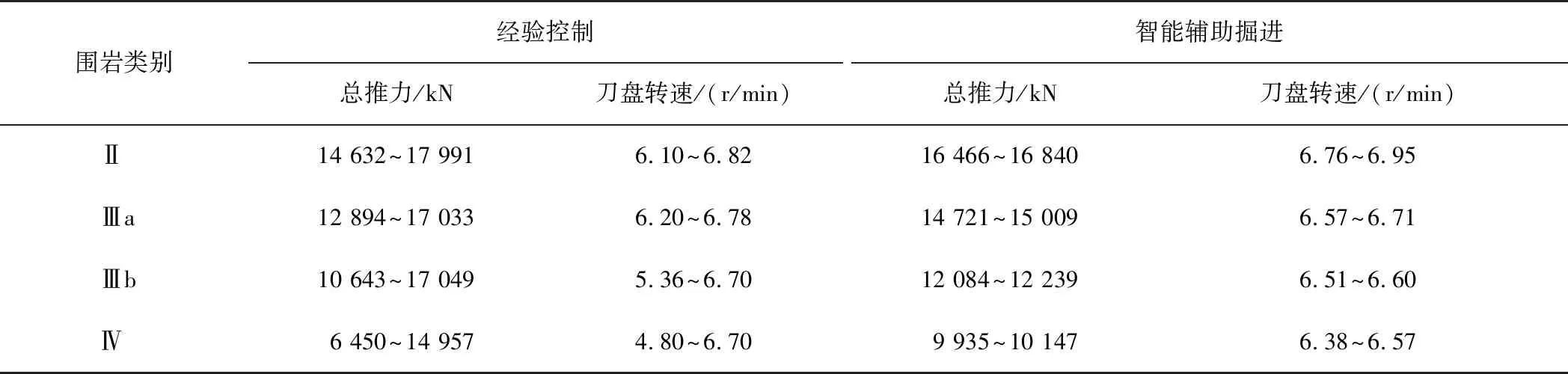
表8 试验段掘进参数取值
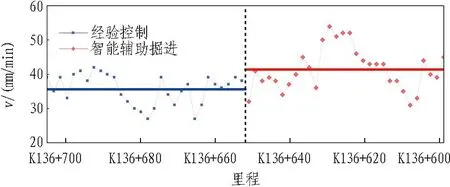
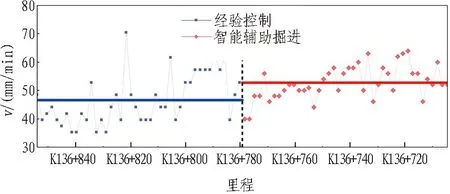
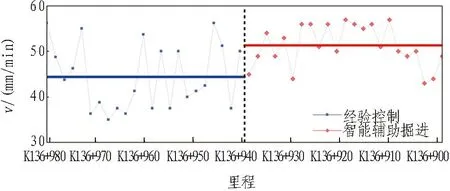
8.5 应用效果
各试验段最终掘进效能随里程的变化曲线见图34—37。图中粗直线代表相应段落掘进效能的加权平均值,其统计结果见表9。各类围岩中智能辅助掘进段的平均掘进速度和平均单刀破岩量普遍高于经验控制段,掘进速度总体提高了15.6%,平均单刀破岩量总体提高了4.5%,且在智能辅助掘进段落未出现因掘进参数选择不当而导致TBM掘进停滞或设备异常损坏等情况,智能辅助掘进技术具有显著优越性。
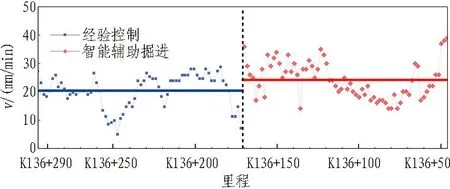
(a) 掘进速度
(a) 掘进速度
(a) 掘进速度
(a) 掘进速度
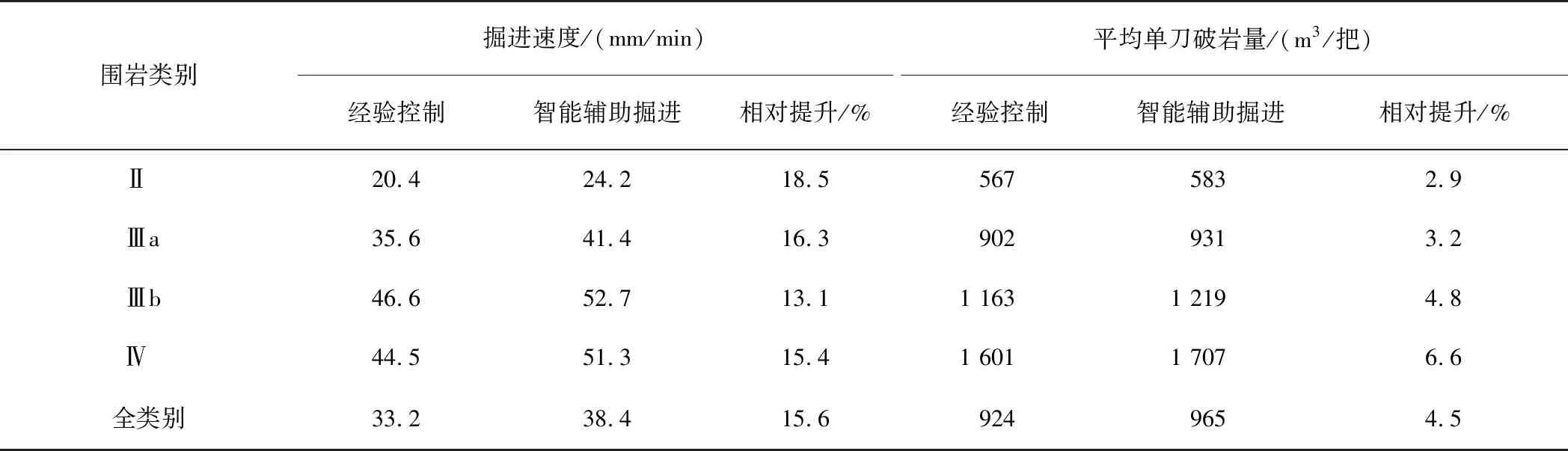
表9 XE隧洞试验段掘进效能统计
9 结论与讨论
本文依托北疆供水二期工程,基于图像识别、数据挖掘和机器学习等技术,构建了由围岩感知子系统、大数据分析子系统和辅助决策子系统3部分组成的TBM隧洞智能辅助掘进系统,并在XE隧洞进行了应用,得到以下结论:
1)通过岩渣图像识别及刀盘振动波时频分析,建立了围岩智能感知模型,实现了对掌子面围岩类别及力学参数的实时判别。试验段应用表明,预测的岩石单轴抗压强度平均绝对百分比误差为5.8%,岩体完整性系数的平均绝对百分比误差为5.9%,围岩类别预测准确率达93%。
2)以岩石单轴抗压强度、岩体完整性系数、岩石石英质量分数、总推力、刀盘转速作为设计变量,建立了掘进速度及平均单刀破岩量预测模型,基于MOPSO算法构建了以“高效率、低成本”为目标的掘进参数优化方法,提出了3类掘进模式,实现了不同场景下掘进参数的精准选取。
3)TBM智能辅助掘进技术在XE隧洞Ⅱ—Ⅳ类围岩中成功应用,掘进速度提高了15.6%,平均单刀破岩量提高了4.5%,且未发生因掘进参数选择不当而导致的TBM掘进停滞或设备异常损坏等问题。
4)在完成围岩智能感知以及掘进参数工况自适应动态调控的基础上,可进一步构建包含远程监控、数据上传、故障诊断等功能的智能化决策控制系统,从而形成高度智能化隧道掘进技术,最终实现TBM隧洞的安全高效掘进。
