多变流器互联交直流微网集群一致性功率协同控制
2024-05-07杨天国丁元元
杨天国,何 鹏,张 浩,周 倩,石 侃,丁元元
(1.云南电网有限责任公司德宏供电局,德宏 678400;2.云南电网有限责任公司电力科学研究院,昆明 650214;3.云南电网有限责任公司瑞丽供电局,瑞丽 678600)
由于微电网能够高效灵活接纳分布式新能源和储能,并为需求侧负荷提供可靠供电,得到了极大关注和发展[1-2]。若多个交、直流微电网地理位置邻近,交、直流微电网间可经多个双向DC-AC互联,直流微电网间可经多个双向DC-DC互联,最终形成多变流器互联交直流微网集群。集群系统可发挥子系统间互动协同能力,充分调动所有分布式电源、储能等的备用容量,共同应对集群内新能源出力的随机性及负荷波动性,以及单一子系统备用容量不足等复杂场景,提升全系统运行稳定性及供电灵活性[3-4]。
多变流器互联交直流微网集群系统通常采用分层控制架构,包括就地控制层、上层协调及优化层等[5-6]。协调及优化层往往基于多子系统、多设备间信息交互及通信来实现二次恢复控制、协调和优化等运行目标;就地控制层面,系统内交、直流微电网及互联变流器等仅通过就地量测信息实现快速稳定控制[7-8]。具备高可靠性及灵活性的就地控制层稳定控制系统是多变流器互联交直流微网集群系统在复杂场景,特别是非计划暂态冲击下系统稳定运行的关键,这也是本文的研究重点。多变流器互联交直流微网集群就地控制层面主要面临子系统间功率协同互济、多运行模式控制和多互联变流器功率分配等控制问题。
在子系统间功率协同互济方面,发展多变流器互联交直流微网集群,其目的在于充分利用子系统间功率互济能力,减少新能源出力及负荷等功率扰动对单一子系统的暂态冲击,提升系统整体运行稳定性和可靠性。文献[9]提出一种DC-AC 互联舰船交、直流配电系统分布式储能协同控制方法,然而交、直流子系统中分布式储能需通过快速通信获取另一子系统的频率或直流电压信息,通信故障将影响系统运行可靠性;文献[10]针对交直流微网群,提出一种基于多智能体系统的一致性协同控制,各设备利用邻近通信实现联络线功率扰动抑制,但所提控制策略仍须依赖通信网络,影响系统非计划暂态冲击时系统性能;文献[11-12]提出一种不依赖通信的交直流混合微电网自治运行控制方法,使得互联交、直流子系统频率、直流电压标幺值相同,分布式电源、储能按照其额定容量比进行功率分配,然而互联DC-AC采用电流源型控制,当任一子系统因故障失去稳定运行能力时,另一正常子系统难以为其提供有效支撑,且无法实现所提功率分配控制目标;文献[13]提出一种互联DC-AC 二阶段改进下垂控制,实现交直流微电网功率分配,然而所提互联DC-AC控制本质上属于电流源型控制,只有在子系统均正常运行时才能达到相应控制目的。
在多运行模式控制方面,与交流系统只有并、离网等运行模式不同,交、直流微网集群系统主要有如下模式:①正常运行模式,即系统内子系统、装置均正常工作,系统实现多子系统间功率协同互济;②交、直流微电网支撑模式,即交、直流微电网无法维持自身频率或直流电压稳定时,集群系统其他正常子系统能够为其提供交流电压、频率或直流电压支撑,维持故障子系统功率平衡。针对正常模式下子系统功率协同互济研究,前文已有论述。对于交流微电网支撑模式,文献[14]将虚拟阻抗添加到互联DC-AC下垂控制,可同时实现交流微电网电压、频率支撑及环流抑制;文献[15]提出互联接口变流器虚拟惯性控制,为交流系统提供交流电压、频率支撑。这一策略仅能在与之互联的子系统正常运行时才能发挥作用,当互联子系统失去自身稳定时,无法为故障交流微电网提供支撑。对于直流微电网支撑模式,文献[16]在互联DC-AC 直流电压下垂控制中增加辅助频率控制项,使互联DC-AC不仅能为直流微电网提供支撑,还能为交流微电网提供功率支援;文献[17-18]提出一种互联变流器广义直流电压下垂控制,可工作于直流电压控制、直流电压下垂控制等模式,为直流系统提供直流电压支撑。该策略仅能在与之互联的子系统正常运行时才能发挥作用,当互联子系统失去自身稳定时,难以为故障直流微电网进行有效支撑。此外,文献[19]提出考虑电动汽车灵活储能的交直流微电网协调控制,实现系统多运行工况间切换,但所提控制采用基于中央控制器的分层控制架构,在系统发生故障等场景下需要非计划运行模式切换时,系统控制模式切换必然受到状态感知、通信延时及控制器切换等影响,无法实现多模式自适应平滑切换。
在多互联变流器功率分配方面,当子系统间互联传输功率较大时,往往通过多并联变流器柔性互联,共同分配传输功率。文献[20]提出一种适用于交直流混合微电网多互联DC-AC 变流器的统一控制策略,实现多互联DC-AC变流器按照其额定容量承担传输功率的目的;文献[21]提出基于直流电压下垂控制的分层控制,不仅实现了多互联DC-AC变流器功率分配,还可为直流微电网提供直流电压支撑。然而,上述研究仅仅考虑了交、直流子系统间多DC-AC变流器功率分配问题,多变流器互联交直流微网集群中互联变流器类型更加多样,还存在直流子系统间通过多DC-DC柔性互联的问题。
综上可知,针对多变流器互联交直流微网集群系统,解决多子系统功率协同互济、多运行模式自适应切换及多互联变流器功率分配等问题,对于提升全系统运行稳定性、可靠性及供电灵活性十分关键。然而,当发生新能源出力及负荷非计划性暂态冲击,或某一子系统失去自身交流电压、频率或者直流电压支撑能力等工况时,现有研究往往是针对某一特定控制目标提出相应控制策略,难以同时实现子系统间功率协同互济、多运行模式自适应平滑切换及多互联变流器功率分配等目标,且往往依赖状态感知及快速通信,同时通信网络故障将严重影响系统运行可靠性。
针对上述问题,本文提出一种适用于多变流器互联交直流微网集群系统的一致性功率协同控制。集群系统基于就地量测直流电压和频率等信息,在不依赖状态感知及控制器切换等情况下对任一子微电网内功率波动、支撑单元故障等复杂工况作出响应,同时实现子系统间功率协同互济、多互联变流器功率分配及多运行模式自适应平滑切换等目标。从稳态层面分析所提控制的可行性,并基于小信号模型研究控制参数对小扰动动态特性的影响。最后,基于PSCAD/EMTDC 仿真模型验证了所提控制的有效性。
1 多变流器互联交直流微网集群
1.1 系统介绍
本文以如图1 所示的多变流器互联交直流微网集群为对象进行研究,集群包括2个直流微电网和1 个交流微电网,交流微电网通过2 个DC-AC 与直流微电网#1互联,直流微电网#1和#2之间通过2个DC-DC 互联。每个微电网均包含支撑单元和功率单元两类,支撑单元用于控制微电网母线频率或直流电压稳定;采用最大功率跟踪控制的分布式新能源及具备恒功率运行特性的电力电子设备、负荷等均可看作功率单元[22]。为方便理论研究,每个微电网只包含1个支撑单元和功率单元,均经相应电力电子设备与母线互联。功率单元采用定功率控制,利用调整功率设定值模拟分布式电源或者负荷功率变化。值得指出的是,图1中的拓扑可以拓展到更多交直流微网互联的场景。
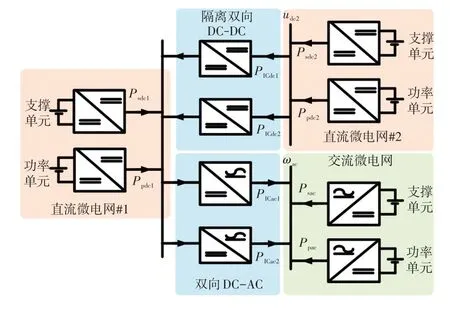
图1 多变流器互联交直流微网集群系统拓扑Fig.1 Topology of AC/DC microgrid cluster system with multiple interconnected converters
图1中,udci为直流微电网#i的母线直流电压,i=1,2;Psdci、Ppdci分别为直流微电网#i内支撑单元和功率单元的输出功率;ωac为交流微电网的母线频率;Psac、Ppac分别为交流微电网内支撑单元和功率单元的输出功率;PICdcj为隔离双向DCDC#j的传输功率,j= 1,2;PICack为隔离双向DCAC#k的传输功率,k=1,2;箭头方向为功率流动的正方向。本文所有变量及控制策略均基于标幺值系统。
1.2 运行控制目标
针对图1 中的多变流器互联交直流微网集群系统,期望所提控制策略仅仅利用就地量测电气信息,能够同时实现如下控制目标。
(1)子系统间功率协同互济。发展多变流器互联交直流微网集群,旨在充分利用系统内所有分散支撑单元的相互支撑能力,减少新能源出力及负荷等功率扰动对单一子系统的暂态冲击。系统正常运行时,期望所提控制仅仅基于就地量测信息,使多变流器互联直流、交直流微网集群系统形成一有机整体,所有分散于各微电网中的支撑单元均能对局部子系统内非计划性暂态冲击自动响应,并按照其下垂系数比合理承担功率,提升单一子系统暂态冲击下的运行性能,实现子系统间功率协同互济。
(2)多运行模式自适应平滑切换。集群正常运行时,各互联变流器的控制作用是实现子系统间功率协同互济。当任一交流或直流微电网因支撑单元故障失去交流电压、频率或者直流电压稳定控制能力时,故障子系统内不平衡功率使该子系统母线频率或直流电压异常,甚至导致系统崩溃。此时,期望所提控制能使相应故障子网互联变流器在不依赖通信、状态感知及控制器切换的情况下实现运行模式切换,使其他正常运行的子系统为故障子网提供交流频率或者直流电压稳定支撑。
(3)多互联变流器功率分配。子系统间传输容量较大时,交、直流微电网间可通过多个双向DC-AC互联,直流微电网可通过多个双向DC-DC变换器互联。此时,期望所提控制策略使集群系统在满足子系统间功率协同互济、多运行模式自适应平滑切换的同时,实现多互联变流器按其额定容量比合理承担子系统间传输功率。
2 一致性功率协同控制
为实现第1.2 节所述运行控制目标,本文提出多变流器互联交直流微网集群一致性功率协同控制策略,其基本控制框架如图2所示。该框架主要包含互联变流器(DC-DC、DC-AC)柔性控制和交、直流微电网下垂控制。
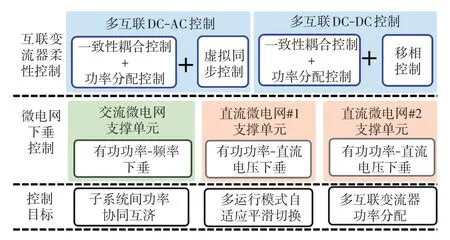
图2 基本控制框架Fig.2 Basic control framework
2.1 交、直流微电网下垂控制
在交、直流微电网中,支撑单元均采用下垂控制,具体控制策略分别如图3 所示。图3 中,uacs、Cacs分别为交流微电网支撑单元直流侧电源电压和电容,kqac、Qsac分别为交流微电网支撑单元无功功率下垂控制环节的下垂系数和输出功率,ωset、uacset分别为交流微电网支撑单元的频率和电压的设定值,θac、uacref分别为交流微电网支撑单元内环电压控制的输入相位和电压幅值,ωB、uacB分别为交流微电网的频率和电压的基值;udcsi、ildcsi分别为直流微电网支撑单元直流电源侧电源电压和电感电流,Ldcsi、Cdcsi分别为直流微电网#i支撑单元直流电压源侧电感和直流母线侧电容,useti、urefi分别为直流微电网#i支撑单元电压设定值和下垂控制生成的直流电压参考,Gudci(s)、isrefi分别为直流微电网#i支撑单元直流电压控制器和直流电压控制生成的电流参考,kdci为直流微电网#i支撑单元下垂控制的下垂系数。由图3 可知,交、直流微电网内支撑单元稳态输出功率与其相应频率和直流电压满足的下垂特性可表示为
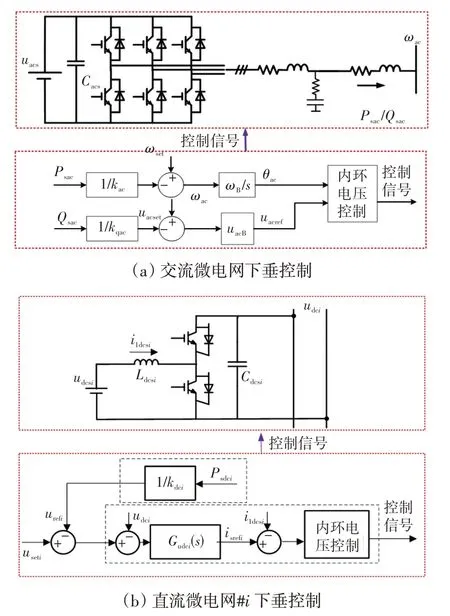
图3 微电网支撑单元下垂控制Fig.3 Droop control of support units in microgrids
式中:ωset为交流微电网频率设定值;kac为交流微电网支撑单元有功功率下垂控制的下垂系数;useti为直流微电网#i的直流电压设定值。
由式(1)可知,按照各支撑单元额定容量比可设定下垂系数,实现微电网内功率自主分配。然后将设计一个仅仅利用就地量测信息,使集群内所有支撑单元按照其额定容量比承担功率,实现子系统间功率协同互济、多运行模式自适应平滑切换及多互联变流器功率分配等目标的互联变流器控制。
2.2 互联变流器柔性控制
互联变流器控制是集群在无互联通信条件下同时实现子系统间功率协同互济、多运行模式自适应平滑切换及多互联变流器功率分配的关键。为此,基于各微电网下垂特性,提出互联DC-AC 和DC-DC柔性控制,如图4所示。
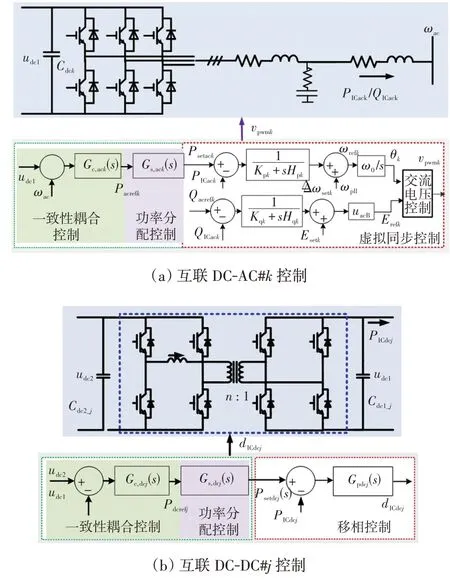
图4 互联变流器柔性控制Fig.4 Flexible control of interconnected converters
对于互联DC-AC#k,Cdck为直流侧电容,Gs,ack(s)为互联DC-AC#k功率分配控制器,Kpk、Hpk分别为有功控制环节的下垂系数和惯性系数,Psetack为外环功率设定值,Δωsetk为有功控制环节产生的频率变化量,ωpll为锁相得到的频率,ωrefk为Δωsetk与通过锁相得到的频率ωpll相加的频率参考,θk为ωrefk通过积分产生的相位;Qacrefk、QICack分别为无功功率设定值及实际值,Kqk、Hqk分别为无功控制环节的下垂系数与惯性系数,Esetk为无功控制环节电压幅值设定值;vpwmk为交流电压控制残生的控制信号;Gc,ack(s)、Pacrefk分别为互联DC-AC 一致性耦合控制的控制器和生成的功率参考值,Gc,ack(s)采用PI 控制。对于互联DC-DC#j,Psetdcj为外环功率设定值,Gc,dcj(s)、Pdcrefj分别为互联DC-DC 一致性耦合控制的控制器和生成的功率参考值,Gc,dcj(s)采用PI 控制;Gs,dcj(s)为互联DC-DC#j功率分配控制器;Gpdcj(s)、dICdcj分别为移相控制器和生成的移相比;Cdc1_j、Cdc2_j分别为直流微电网#1 和#2 侧的直流电容。
互联DC-AC#k采用两电平电压源型变流器拓扑,互联DC-DC#j采用基于DAB的隔离双向DC-DC变流器以实现两侧电气隔离及功率灵活控制[23]。互联DC-AC和互联DC-DC控制系统均包含外环控制和内环控制两部分,外环、内环控制设计思路如下。
1)外环控制设计
外环控制是实现集群子系统间功率协同互济和多互联变流器功率分配的关键。为此,互联DCAC和互联DC-DC外环采用图4所示的互联变流器柔性控制,均包含一致性耦合控制和功率分配控制环节。
(1)一致性耦合控制。由第2.1节可知,各交、直流微电网中支撑单元均采用下垂控制,因此支撑单元可通过自主感知相应微网母线频率,直流电压动态按下垂系数比合理分配微网内部功率。若互联变流器能将各微电网母线频率、直流电压进行耦合,实现各交、直流微电网频率和直流电压标幺值一致,则可实现集群内所有支撑单元间接自主联动,统一按照其下垂系数比分配功率,实现子系统间功率协同互济。依据上述思想,本文针对互联DC-AC和互联DC-DC,基于就地量测频率或直流电压等信息,设计一致性耦合控制,即
由式(2)可知,由于互联DC-AC 和互联DC-DC一致性耦合PI控制的无差控制特性,稳态时,交、直流微电网频率和直流电压将满足ωac=udc1=udc2,即集群系统内所有微电网频率和电压标幺值一致,进而各微电网内支撑单元依据式(1)的下垂特性,实现集群内所有支撑单元按其下垂系数比进行功率分配,实现子系统间功率协同互济。
(2)功率分配控制。为进一步实现多互联变流器功率分配,在一致性耦合控制基础上,增加图4中的功率分配控制。
针对多互联DC-AC,由于外环采用相同的一致性耦合控制环节,在此基础上增加采用比例控制的功率分配控制器Gs,ack(s),进而生成内环功率参考输入Psetack。为使多互联DC-AC 按照其额定容量分配互联传输功率,Gs,ack(s)的比例系数应满足的关系为
式中:ε1、SDC-AC#1分别为互联DC-AC#1 功率分配控制的比例分配系数和额定容量;ε2、SDC-AC#2分别为互联DC-AC#2 功率分配控制的比例系数和额定容量。
同理,针对多互联DC-DC,为实现多DC-DC 按照其额定容量分配互联传输功率,功率分配控制器Gs,dcj(s)的比例系数应满足的关系为
式中:μ1、SDC-DC#1分别为互联DC-DC#1 功率分配控制的比例分配系数和额定容量;μ2、SDC-DC#2分别为互联DC-DC#2 功率分配控制的比例系数和额定容量。
综上可知,当集群系统内互联DC-AC 和互联DC-DC采用上述外环控制时,可仅基于就地量测电气信息,使各交、直流微电网频率、直流电压标幺值一致,进而实现集群内所有支撑单元间接自主联动按照其下垂系数比分配功率,且子网间多互联变流器能按照其额定容量合理分配传输功率。
2)内环控制设计
在外环控制基础上,设计内环控制,使互联DC-AC 和互联DC-DC 不仅能够准确快速跟踪外环控制生成的功率设定值,实现子系统间功率互济及多互联变流器功率分配,还能实现多运行模式自适应平滑切换,。为此,互联DC-AC和互联DC-DC分别采用图4中的内环控制。
针对互联DC-AC#k,内环采用图4(a)中的电压源型虚拟同步控制,包括有功控制、无功控制及交流电压控制等环节。有功控制环节将外环功率设定值Psetack与就地量测传输有功PICack之差作为输入,并通过下垂控制产生频率变化量Δωsetk。为使互联DC-AC能准确跟踪外环功率设定值,Δωsetk与通过锁相得到的频率ωpll相加获取频率参考ωrefk,进而通过积分产生交流电压控制的相位θk,稳态时ωpll和ωac相等。无功控制环节将无功功率设定值Qacrefk与传输无功功率实际值QICack之差作为输入,并通过具备模拟惯性的下垂控制产生电压幅值参考Erefk。
针对互联DC-DC#j,内环采用图4(b)中的移相控制,将外环功率设定值Psetdcj与就地量测传输有功功率PICdcj之差作为移相控制器Gpdcj(s)的输入,生成移相比dICdcj。其中,移相控制器Gpdcj(s)采用PI控制器。
2.3 一致性功率协同控制策略工作原理
本节将从稳态运行层面分析所提控制策略实现集群子系统间功率协同互济、多运行模式自适应平滑切换及多互联变流器功率分配等控制目标的工作原理。
1)正常运行模式
由图4 中的互联DC-AC 和DC-DC 外环一致性耦合PI 控制的无差控制特性,可得稳态时各交、直流微电网母线频率及直流电压满足的关系为
由各交、直流微电网母线处功率平衡可得
由互联DC-AC、DC-DC 功率分配控制及式(1)交、直流微电网支撑单元下垂特性,可得各支撑单元稳态输出功率分别为
互联DC-AC、DC-DC传输功率稳态值分别为
由式(7)、式(8)可知,采用所提控制正常运行模式,集群可在无互联通信下实现子系统间功率协同互济,多互联变流器能按照其额定容量承担互联传输功率。
2)直流微电网支撑模式
以直流微电网#1 支撑单元故障退出为例进行分析。假设系统正常运行时,直流微电网#1支撑单元突然退出运行,即支撑单元输出功率Psdc1=0,互联DC-AC 及DC-DC 仍然采用所提控制(无需任何通信、状态检测及控制策略切换),由于外环一致性耦合PI 控制无差调节作用,仍会使各母线直流电压、频率趋于相等,稳态时仍满足式(5)关系。
由各交、直流微电网母线处功率平衡可得
由式(1)和交、直流微电网支撑单元下垂控制特性,以及互联DC-AC、DC-DC功率分配关系,可推导出稳态下正常运行的支撑单元输出功率分别为
互联DC-AC及DC-DC传输功率稳态值分别为
各微电网稳态直流电压和频率分别为
由式(10)~(12)可知,采用所提控制,当直流微电网#1支撑单元退出后,集群系统仍能够重新回到新的平衡点,故障直流微电网#1的母线电压得到有效支撑,且其他正常运行的支撑单元仍能按照其下垂比合理承担功率。
3)交流微电网支撑模式
以交流微电网支撑单元故障退出为例,阐述所提一致性功率协同控制策略如何实现由正常运行模式无缝切换到交流微电网支撑模式。
假设系统正常运行时,交流微电网支撑单元突然退出运行,即支撑单元输出功率Psac=0 ,互联DC-AC 及DC-DC 仍然采用所提控制(无需任何通信、状态检测及控制策略切换),由于外环一致性耦合PI 控制无差调节作用,仍会使各母线直流电压、频率趋于相等,稳态时仍满足式(5)关系。
由各交、直流微电网母线处功率平衡可得
由式(1)和交、直流微电网支撑单元下垂控制特性,以及多互联DC-AC、DC-DC功率分配关系,可推导得到稳态下正常运行的支撑单元输出功率分别为
互联DC-AC、DC-DC传输功率稳态值分别为
各微电网稳态直流电压和频率分别为
由式(14)~(16)可知,采用所提控制策略,当交流微电网支撑单元退出后,集群系统仍能够重新回到新的平衡点,故障交流微电网的母线频率得到有效支撑,且其他正常运行的支撑单元仍能按照其下垂比合理承担功率。
3 多变流器互联交直流微网集群小信号建模
采用模块化建模,在系统稳态运行点进行线性化处理,建立正常运行模式集群系统小信号模型,包括交、直流微电网小信号建模、互联DC-AC 小信号建模及互联DC-DC小信号建模等。
1)交、直流微电网建模
结合交、直流微电网拓扑及其控制策略,可得正常运行模式下,各交、直流微电网小信号模型分别如图5所示。

图5 交、直流微电网小信号模型Fig.5 Small-signal models of AC/DC microgrids
由图5(a)并结合交流微电网支撑单元下垂控制特性及功率单元控制动态,可将交流微电网母线频率动态表示为
式中:“Δ”为相应变量的小扰动变化量;Gcc(s)为交流微电网功率单电流PI控制闭环传递函数。
结合直流微电网支撑单元下垂控制、直流电压控制、电流内环控制动态和功率单元控制动态,以及直流微电网母线电压动态,可将直流微电网母线直流电压动态表示为
式中:Gpdc1(s)、Gpdc2(s)分别为直流微电网#1和#2功率单元电流控制内环闭环传递函数;K1=分别为直流微电网#1 和#2 母线处的等效电容;udc1B、udc2B分别为直流微电网#1和#2的直流电压基准值;PB为功率基值。等效传递函数Geq1(s)和Geq2(s)的具体形式可分别表示为
式中,Gidc1(s)、Gidc2(s)分别为直流微电网#1 和#2 支撑单元电流内环闭环传递函数。
2)互联DC-AC建模
互联DC-AC#k及锁相环控制的小信号模型如图6所示。由图6(b)可得锁相频率变化量Δωpll为
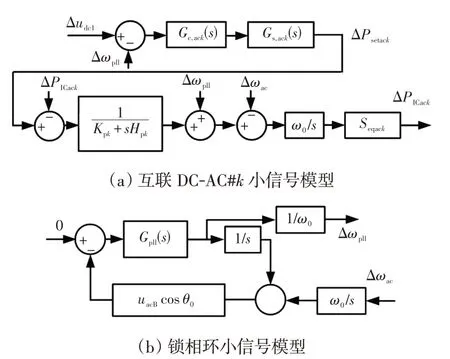
图6 互联DC-AC 及锁相环小信号模型Fig.6 Small-signal models of interconnected DC-AC converter and PLL
式中:Geqpll(s)为锁相环闭环传递函数;Gpll(s)为锁相环PI 控制器;θ0为稳态时的锁相相位角与实际相位角的角度差,稳态值为0。
由图6 及式(20)并结合互联DC-AC 一致性耦合控制、功率分配控制、虚拟同步控制和锁相环控制等动态,可将互联DC-AC#k的传输功率变化量ΔPICack表示为
式中,Guωk(s)、Gωωk(s)为等效传递函数,其具体形式可表示为
式中:Seqack为描述ΔPICack与功角Δδk间的数学关系;ω0为角速度基值。
3)互联DC-DC建模
互联DC-AC#j的小信号模型如图7所示。由图7 结合一致性耦合控制、功率分配控制及移相控制等动态,互联DC-DC#j传输功率变化量ΔPICdcj可表示为
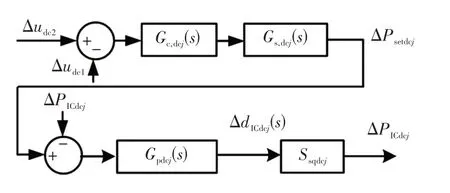
图7 互联DC-DC 小信号模型Fig.7 Small-signal model of interconnected DC-DC converter
式中,Seqdcj为描述ΔPICdcj与移相比ΔdICdcj间的数学关系,具体形式可表示为
式中:n为隔离双向DC-DC 变比;DICDCj为稳态时占空比;udc10、udc20为两侧电压的稳态值。
4)全系统小信号建模
基于交、直流微电网小信号模型、互联DC-AC小信号模型及互联DC-DC小信号模型,可建立多变流器互联交、直流微网集群全系统小信号模型,如图8所示。基于图8所示的全系统小信号模型,可用于分析所提控制策略对系统小扰动特性的影响。

图8 全系统小信号模型Fig.8 Small-signal model of whole system
4 仿真验证
4.1 系统配置
基于PSCAD/EMTDC 建立图1中的集群仿真模型。仿真模型中,开关频率为10 kHz,基准功率为100 kW,交、直流微电网直流电压和频率的基准值分别为750 V 及50 Hz;交、直流微电网支撑单元额定容量比为1∶1∶2,并按照此比例设定各支撑单元下垂系数;互联DC-AC 额定容量比为2∶1,各互联DC-AC 或者DC-DC 按照上述比例设置其功率分配控制的比例分配系数;各微电网、互联DC-AC 及DC-DC 基本参数分别如表1~7 所示。在交流微电网、直流微电网发生暂态功率扰动等变化时进行仿真,对图8中所建小信号模型及小扰动特性进行分析和验证。

表1 交流微电网基本参数Tab.1 Basic parameters of AC microgrid
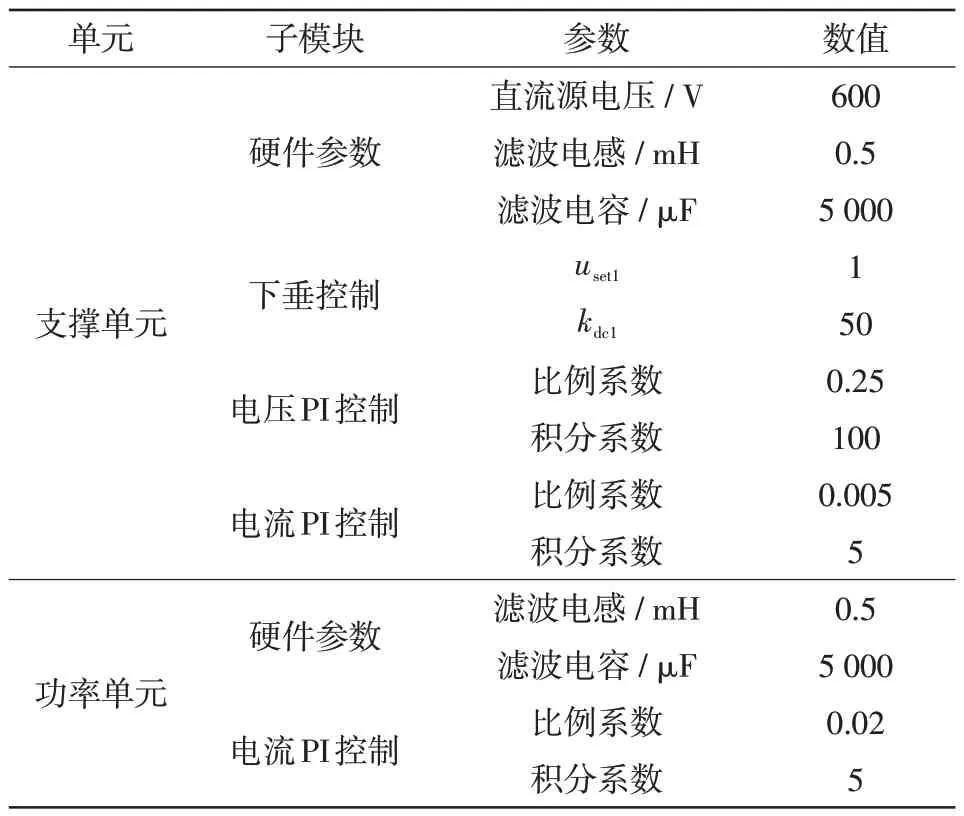
表2 直流微电网#1 基本参数Tab.2 Basic parameters of No.1 DC microgrid
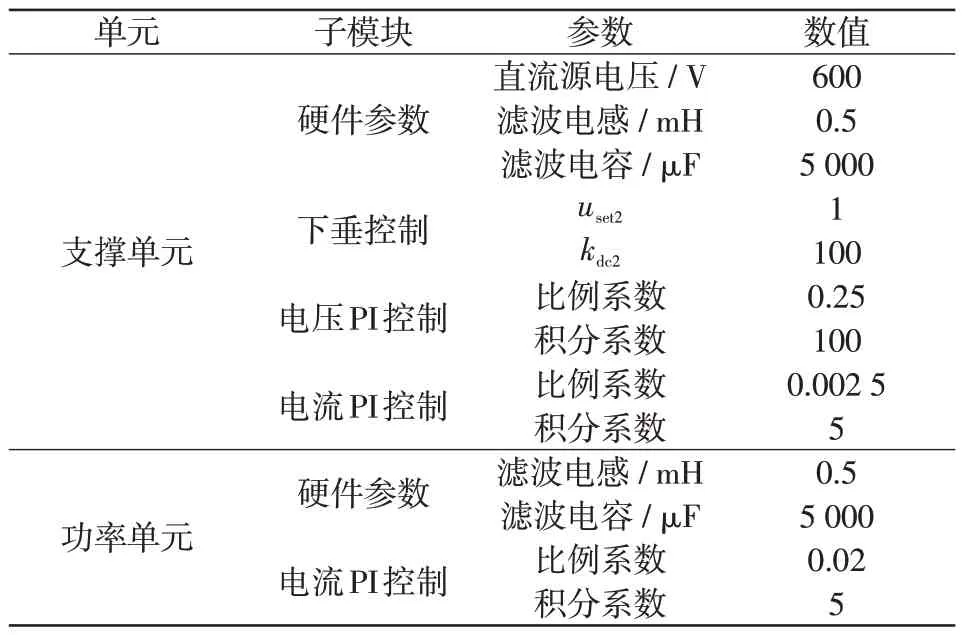
表3 直流微电网#2 基本参数Tab.3 Basic parameters of No.2 DC microgrid
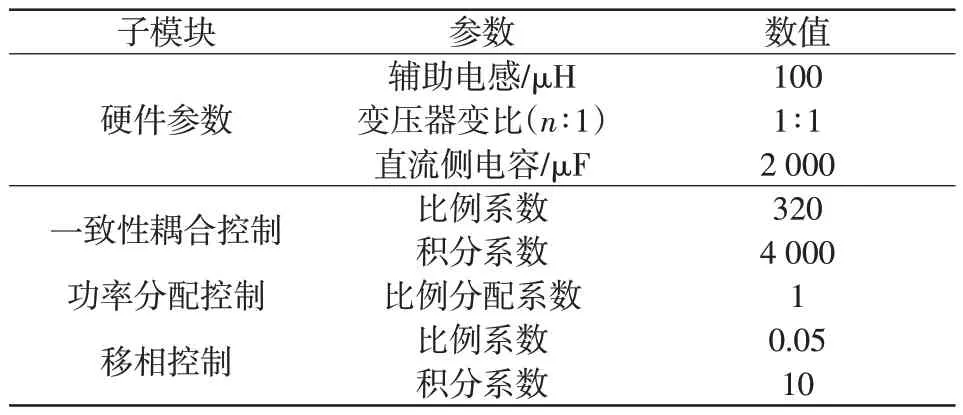
表4 互联DC-DC#1 基本参数Tab.4 Basic parameters of No.1 interconnected DC-DC converter
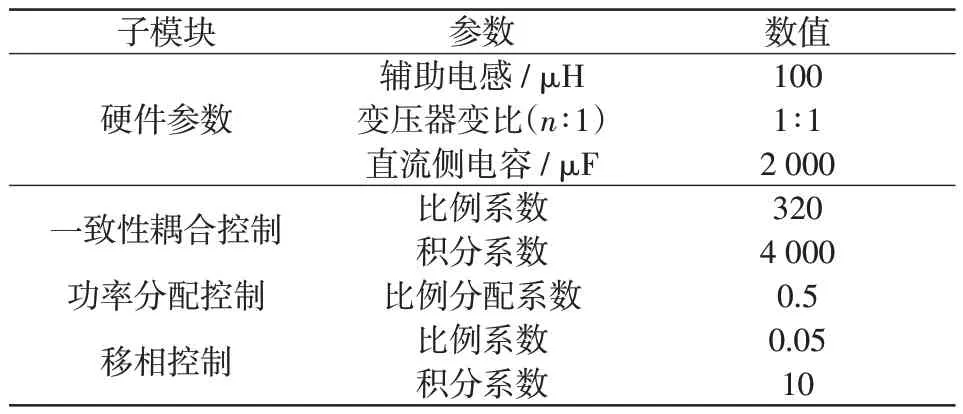
表5 互联DC-DC#2 基本参数Tab.5 Basic parameters of No.2 interconnected DC-DC converter
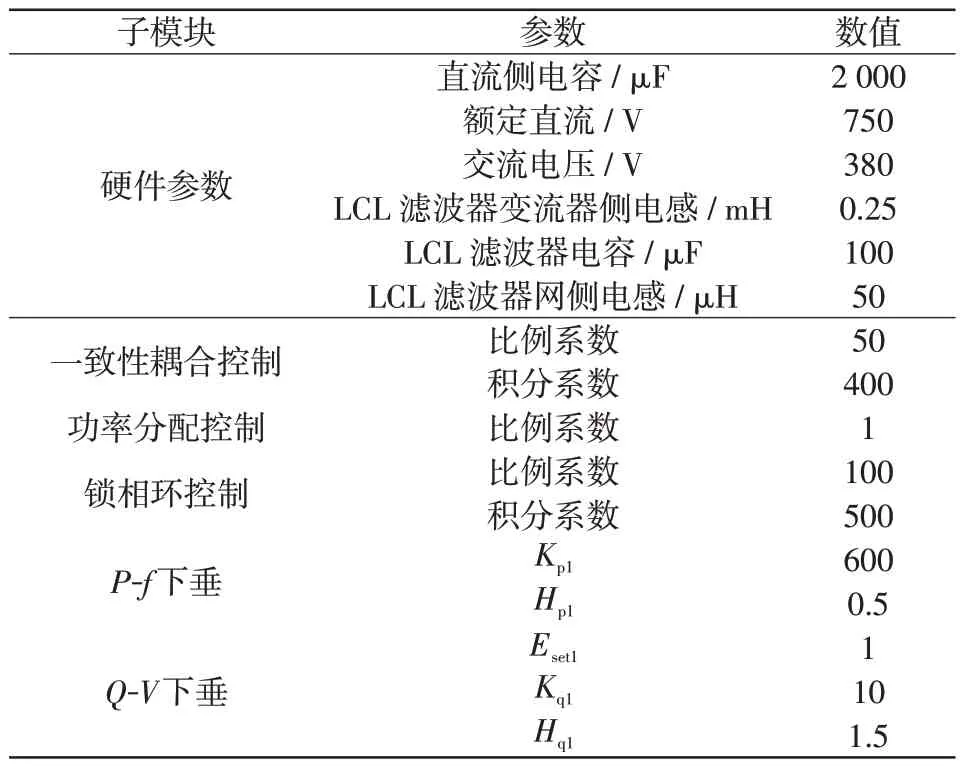
表6 互联DC-AC#1 基本参数Tab.6 Basic parameters of No.1 interconnected DC-AC converter
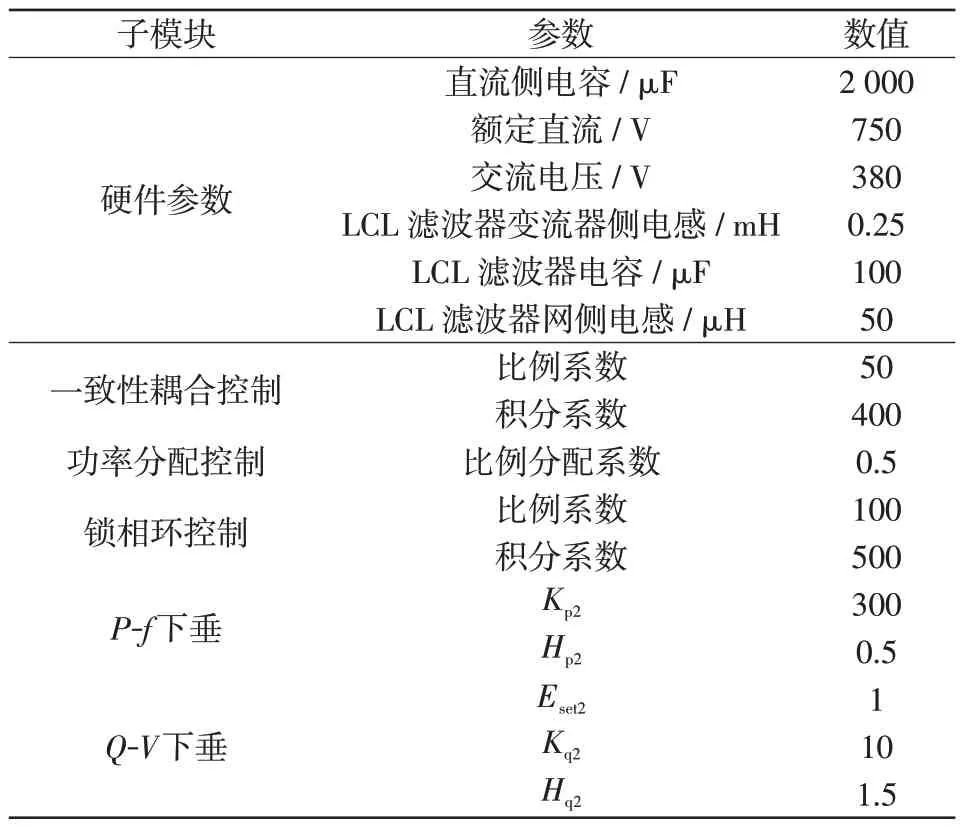
表7 互联DC-AC#2 基本参数Tab.7 Basic parameters of No.2 interconnected DC-AC converter
4.2 场景1 交流微电网发生变化。
当交流微电网发生变化时,采用所提控制时仿真结果如图9所示。具体场景描述如下:前5 s交、直流微电网功率单元输出功率分别为Ppac=-0.8 p.u.、Ppdc1=-0.4 p.u.、Ppdc2=-0.2 p.u.;第5 s时,交流微电网功率单元输出功率由-0.8 p.u.变化到-1.0 p.u.;第7 s时交流微电网支撑单元退出运行。
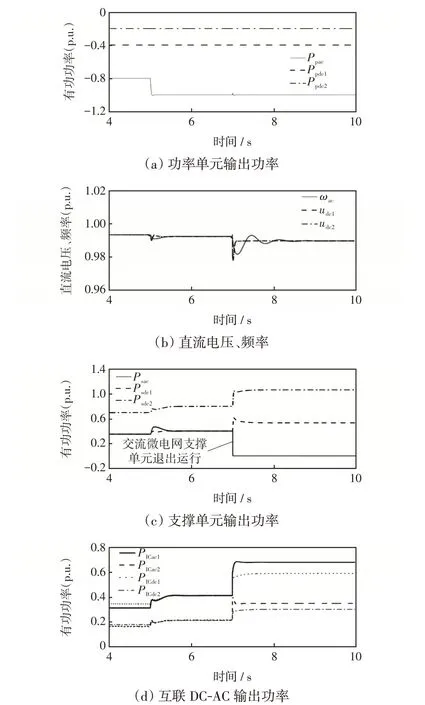
图9 交流微电网发生变化时仿真结果Fig.9 Simulation results when AC microgrid changes
由图9可知,采用所提控制,第3~5 s各交、直流微电网支撑单元功率输出分别约为0.35 p.u.、0.35 p.u.和0.70 p.u.,与式(7)理论计算结果基本一致,集群内所有支撑单元按照其额定容量比分配功率,各互联DC-AC、DC-DC 功率输出分别约为0.300 p.u.、0.150 p.u.、0.165 p.u.和0.332 p.u.,与式(8)理论计算结果几乎吻合;第5 s 交流微电网发生功率扰动后,经过短暂动态调整,各交、直流微电网支撑单元功率输出分别约为0.4 p.u.、0.4 p.u.和0.8 p.u.,与式(7)理论计算结果基本一致,集群内所有支撑单元按照其额定容量比分配功率,各互联DC-AC、DCDC 功率输出分别约为0.4 p.u.、0.2 p.u.、0.4 p.u.和0.2 p.u.,与式(8)理论计算结果基本一致;第7 s 交流微电网支撑单元退出运行后,故障交流微电网频率得到有效支撑,经过暂态调整后恢复稳态运行,稳态频率值约为0.989 p.u.,与式(16)理论计算结果几乎一致。2 个直流微电网直流电压动态基本一致,仿真结果验证了本文理论分析的有效性。
综上,当交流微电网发生变化时,系统可在不依赖通信、状态感知及控制器切换等情况下实现子系统间功率协同互济、多互联变流器功率分配,以及运行模式自适应平滑切换,即由正常运行模式平滑过渡到交流微电网支撑模式,为故障交流微电网提供频率支撑。
4.3 场景2 直流微电网发生变化。
以直流微电网#1发生变化为例进行验证,采用所提控制策略时仿真结果如图10 所示。工况具体描述如下:前5 s交、直流微电网功率单元输出功率分别为Ppac=-0.8 p.u.、Ppdc1=-0.4 p.u.、Ppdc2= -0.2 p.u.;第5 s 时,直流微电网#1 功率单元输出功率由-0.4 p.u.变化到-0.6 p.u.;第7 s时直流微电网#1支撑单元退出运行。
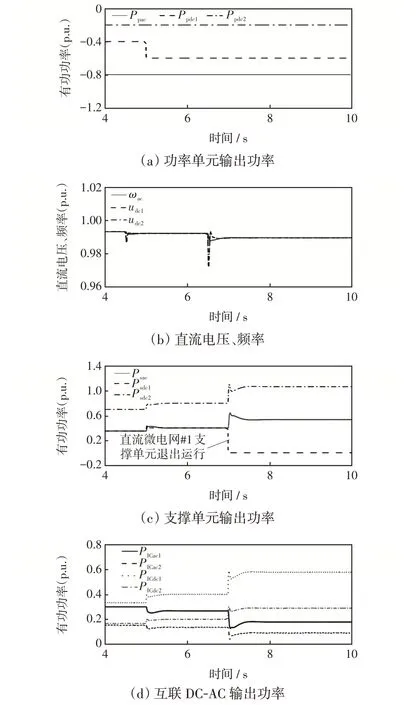
图10 直流微电网#1 发生变化时仿真结果Fig.10 Simulation results when No.1 DC microgrid changes
由图10 可知,第5 s 直流微电网#1 发生功率扰动后,各交、直流微电网支撑单元功率输出分别约为0.4 p.u.、0.4 p.u.和0.8 p.u.,与式(7)理论计算结果基本一致;集群内所有支撑单元按照其额定容量比分配功率,各互联DC-AC、DC-DC 功率输出分别约为0.267 p.u.、0.135 p.u.、0.400 p.u.和0.200 p.u.,与式(8)理论计算结果几乎吻合;第7 s直流微电网#1支撑单元退出运行后,故障直流微电网#1直流电压得到有效支撑,经过暂态调整后恢复稳态运行,稳态频率值约为0.989 p.u.,与式(12)理论计算结果几乎一致。仿真结果验证了本文理论分析的有效性。
综上,当直流微电网发生变化时,系统可在不依赖通信、状态感知及控制器切换等情况下实现子系统间功率协同互济、多互联变流器功率分配,且能实现运行模式的自适应平滑切换,即由正常运行模式平滑过渡到直流微电网支撑模式,为故障直流微电网提供有效直流电压支撑。
4.4 小扰动模型仿真验证及特性分析
基于图8 所示集群小信号模型,分析所提控制策略对系统小扰动动态的影响。为验证所建小信号模型的正确性,在PSCAD/EMTDC 中搭建图1 中的集群详细模型及小信号模型。第5 s 时,直流微电网#1功率单元输出功率由-0.4 p.u.变化到-0.6 p.u.,详细模型与小信号模型仿真结果对比如图11所示。由图11 可知,所建小信号模型与详细模型基本吻合,验证了小信号模型的准确性。
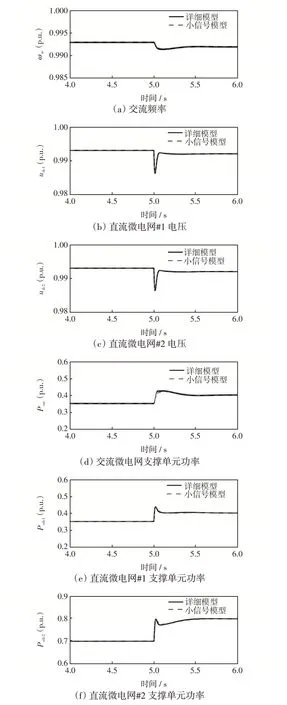
图11 详细模型与小信号模型仿真结果Fig.11 Simulation results of detailed model and smallsignal model
以互联DC-AC虚拟同步控制为例,研究系统控制参数的影响,在互联DC-AC#1虚拟同步控制的有功控制环路下垂系数Kp1分别取50、300 和600 时,所建小信号模型的仿真结果如图12所示。
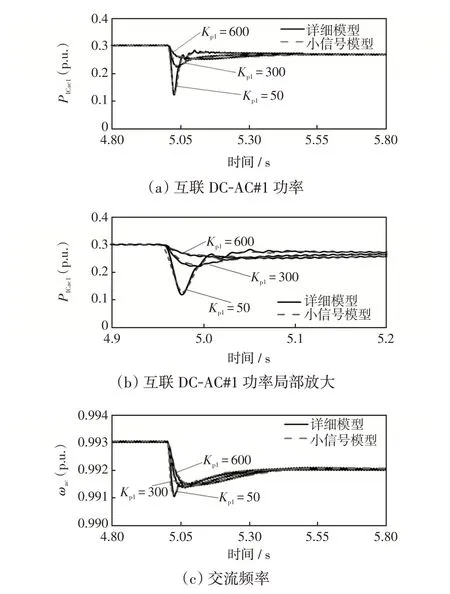
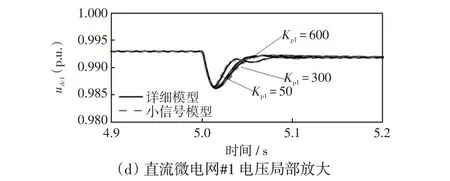
图12 虚拟同步控制有功控制环路下垂系数的影响Fig.12 Influence of droop coefficient of active power control loop in virtual synchronous generator control
由图12 可知,Kp1较小时,互联DC-AC#1 输出功率波动较大;随着Kp1增大,互联DC-AC#1 输出功率动态偏差减小,因此可通过增大互联DC-AC#1虚拟同步控制的有功控制环路下垂系数改善互联DC-AC#1输出功率动态性能。值得指出的是,采用图8可中的全系统小信号模型,可研究其他控制参数的影响,进而指导控制参数优化,改善系统小扰动动态特性。
5 结 论
本文提出一种适用于多变流器互联交、直流微网集群系统的一致性功率协同控制策略,提升全系统运行稳定性、可靠性及控制灵活性,主要贡献和结论如下。
(1)采用所提控制,集群系统仅仅基于就地量测直流电压、频率等电气信息,可在不依赖状态感知及控制器切换等情况下对任一子微电网内功率波动、支撑单元故障等复杂工况做出响应,同时实现子系统间功率协同互济、多互联变流器功率分配及多运行模式自适应平滑切换等目标。
(2)从稳态层面分析所提一致性控制策略在正常运行、交流微电网支撑及直流微电网支撑等模式下的可行性。建立集群系统小信号模型,可从小扰动动态层面分析控制参数对集群系统性能的影响,进而可指导控制参数优化设计。
(3)在PSCAD/EMTDC 软件中搭建多变流器互联交直流微网集群仿真模型,通过仿真对所提方法进行验证。仿真结果和理论分析均验证了所提控制策略的有效性。
