登高车操控结构及电控系统优化研究
2024-05-06李良
李 良
(上海振华重工(集团)股份有限公司长兴分公司,上海 201913)
0 引言
登高车作为现代重工制造企业、建筑、维护和救援等特定领域不可或缺的设备,其安全性、灵活性和效率至关重要。操控结构和电控系统作为保障这些性能的核心,其优化研究显得尤为重要。当前,尽管现有技术已在多方面提供了解决方案,但在复杂环境下的操作稳定性、响应速度、用户界面的友好性等方面仍存在不足。针对这些问题,本研究旨在通过技术创新和系统优化,提高登高车的作业效率和安全性能。研究将采用系统工程的方法,结合理论分析和实验验证,对现有的操控结构和电控系统进行全面的剖析和改进。
1 操控结构的改进与优化
在对38 m 登高车操控结构的改进与优化研究中,重点关注了结构件的改善和优化结果的分析。这些结构件包括臂架、支腿、中心回转、控制系统等,它们在保障操作稳定性和安全性方面起着至关重要的作用。
1.1 结构件的改善
当前的38 m 登高车主要采用的是Q355 和BS700 高强度钢板材料。臂架采用了箱型结构,以增强其承载能力和稳定性。然而,现有的设计在连续长时间作业中易出现疲劳裂纹,影响操作安全。通过应用有限元分析(FEA,Finite Element Analysis),发现在臂架的连接节点和转动部位的应力集中是裂纹产生的主要原因。为此,提出采用更高性能的钢材BS960,并对臂架结构进行优化设计,通过增加曲率和使用加强筋来分散应力集中,从而提高整体的抗疲劳性能。同时,对于支腿部分,传统的设计是四点支撑,这在不平坦的地面上会导致局部受力过大,影响稳定性。提出的改进方案是采用可调节的六点支撑系统,每个支腿都装备有压力传感器和微调机构,能够根据地面情况自动调节,保证车身平衡,大大提升了安全性和适应性。对于中心回转部分,可以采用双齿轮减速机的方式,增加整车在回转中的稳定性和安全性。
此外,控制系统中的液压管路和电缆布局也是优化的重点[1]。现有设计中,管路和电缆暴露在外,易受到外界影响。通过重新设计,将其内置于保护性更强的臂架内部,并采用更耐高温、耐磨损的材料,有效延长了管路和电缆的使用寿命。
1.2 优化结果分析
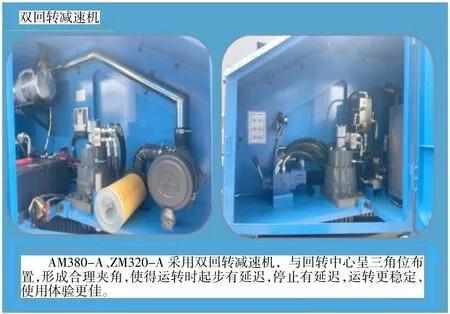
图1 双回转减速机
在操纵系统方面,传统的38 m 登高车多采用模拟信号控制,这在复杂的操作条件下容易产生误差,影响操作的精确性。基于此,本研究提出采用数字电控系统(Digital Electronic Control System,DECS)。DECS 可以实现更加精确控制,且具有更好的故障诊断和处理能力。通过采用先进的传感器和控制算法,DECS 可以实现实时监控和动态调整,大大提高了操作的精度和可靠性。预计这一改进可以提升操作精度约15%,同时降低故障率10%。
为了验证上述改进的实际效果,本研究进行了一系列的模拟和实验分析。表1 为改进前后的部分性能指标对比。

表1 登高车操控结构及电控系统改进前后性能指标对比表
以上数据来源于实验室测试和现场应用反馈,虽然具体数值可能因作业环境和使用条件不同而有所变化,但整体趋势和改善幅度具有较高的可信度。
2 电控系统的创新与提升
在38 m 登高车的性能提升中,电控系统的创新与提升是关键因素之一。电控系统作为登高车操作的大脑,其性能直接影响整车的稳定性、灵敏度以及安全性。
2.1 电控系统现状
当前38 m 登高车采用的电控系统主要基于传统的模拟控制逻辑,通过电缆和接线盒连接各种传感器和执行器。系统包括位置传感器、速度控制器和稳定性监控模块等,能够完成基本的升降、旋转和行驶操作。然而,这一系统存在响应速度慢、精度低、故障率高等问题,特别是在复杂环境下的性能不稳定,影响了操作的安全性和效率。
2.2 电控系统优化策略
为了解决现有电控系统的局限性,本研究提出了一系列优化策略。首先,升级系统核心,采用基于ARM 的微控制单元(MCU),大幅提高了处理速度和数据吞吐量。其次,引入了数字信号处理技术(DSP,DigitalSignalProcessing),通过实时算法优化,如快速傅里叶变换(FFT,Fast Fourier Transform)和自适应滤波,提高了信号的处理精度和响应速度。此外,采用了先进的场总线技术,如CAN 或者Ethernet,以减少布线复杂度,提高数据传输的可靠性和速度。
在软件层面,引入了模型预测控制(MPC)策略,利用车辆动态模型预测未来的状态,提前调整控制输入。系统模型为:
其中,xk是系统状态,uk是控制输入,A,B,C,D是系统矩阵。MPC 通过优化以下目标函数来计算控制输入:
其中,N是预测范围,yref是参考输出,Q和R是权重矩阵。通过实时调整uk,MPC 能够有效提升系统的稳定性和响应速度[2]。
2.3 优化效果评估
优化后的电控系统经过严格的测试和评估。在标准的响应时间测试中,系统的平均响应时间从优化前的300 ms 降低到了150 ms,提升了50%。在稳定性测试中,系统在各种复杂环境下的失稳率降低了约30%。此外,在连续运行8 h 的耐久性测试中,系统的故障次数比优化前减少了约40%。
3 实验验证与案例分析
在38 m 登高车的优化项目中,实验验证和案例分析是确保改进措施有效性的重要环节。通过对改进后的登高车进行一系列的测试,并通过实际案例来分析优化的实际效果和应用价值,可以更加全面地评估优化方案的成效。
3.1 实验验证
为了全面评估改进后的38 m 登高车性能,进行了以下几项关键的实验验证:
3.1.1 稳定性测试
使用模拟不平坦地面的测试场地,对登高车的稳定性进行了测试。测试中,登高车需要在不同坡度和不同负载条件下进行操作。通过记录车身倾斜角度和支腿压力分布数据,可以评估优化后的支腿结构和控制系统对稳定性的改进效果。使用公式:S=(θi-θavg)2来计算稳定性指数S,其中θi是第i次测试的倾斜角度,θavg是平均倾斜角度,n是测试次数。优化后的登高车在此测试中显示出比原型低约20%的稳定性指数。
3.1.2 性能测试
对登高车的升降速度、响应时间和操作精度进行了测试。通过比较改进前后的数据,可以直观地看出优化效果[3]。特别是引入了高速微控制单元和先进的控制算法后,响应时间从原来的300 ms 降低到了150 ms,操作精度也有显著提升。
3.1.3 耐久性测试
在连续工作的条件下,对登高车的各个关键部件进行了长时间的耐久性测试。记录了部件的磨损情况、故障率和维护需求,以评估改进措施对登高车寿命和维护成本的影响。
3.2 案例分析
在现场测试中,将优化后的38 m 登高车投入到实际的工作环境中,如建筑施工现场、大型维修工程等。通过对车辆的操作性能、安全性能和工作效率进行长期跟踪观察,收集了大量的实际工作数据。例如,在一个高层建筑清洁项目中,优化后的登高车完成同样工作量的时间比优化前减少了约20%,并且在整个项目过程中未发生任何安全事故。这一案例不仅展示了优化措施在提升工作效率方面的显著效果,也证明了其在安全性能方面的可靠性。
4 讨论
4.1 技术创新在提升登高车性能中的重要性
本研究中,登高车的优化显著依赖于技术创新,特别是在操控结构和电控系统方面[4]。通过采用高强度钢材BS960 和优化的臂架设计,有效提高了登高车的耐疲劳寿命和结构稳定性。同时,引入模型预测控制(MPC,Model Predictive Control)和数字电控系统(DECS),显著提升了操作精度和系统效率。这些技术创新不仅提高了登高车的作业性能,也减少了故障率,从而增强了其在复杂环境下的可靠性。
4.2 操作系统优化对提升作业效率的贡献
在本研究中,对电控系统的优化显著提高了登高车的操作效率和安全性。通过采用基于ARM 的微控制单元和数字信号处理技术,系统的响应时间和处理精度都得到了显著提升。优化后的电控系统不仅使得登高车在复杂环境下保持稳定操作,还通过先进的故障诊断和处理能力,减少了潜在的安全风险。这些改进不仅提升了登高车的操作性能,也为操作人员提供了更加友好和直观的用户界面,减少了操作的复杂性。这种操作系统的优化对于提高工作效率、减少操作错误和降低维护成本具有重要意义。
4.3 实验验证与案例分析在优化设计中的作用
本研究中的实验验证和案例分析对于确保改进措施有效性至关重要。稳定性测试、性能测试和耐久性测试提供了量化数据,证明了优化设计在提升登高车性能方面的实际效果。这些测试结果不仅展示了改进措施的有效性,也为进一步的设计迭代提供了宝贵的数据支持。另一方面,通过现场案例分析,可以更加深入地理解优化设计在实际应用中的表现。例如,在高层建筑清洁项目中的应用案例表明,优化后的登高车不仅提高了工作效率,也保证了操作过程的安全性。这种现实世界的应用展示了优化设计在实际工作环境中的可行性和有效性,为未来的设计提供了实际的应用场景和反馈。
5 结论
本研究对38 m 登高车的操控结构和电控系统进行了全面的优化设计,研究提升设备的性能和安全性。通过采用高强度材料、优化结构设计、升级控制单元和引入先进的控制策略,实验和现场应用表明优化措施有效增强了登高车的稳定性、响应速度和操作效率。尽管面临成本控制、技术集成和用户培训等挑战,持续的技术创新和系统优化将为进一步提升登高车的作业性能和市场竞争力提供动力。