多风电场支撑电网频率稳定的动态差异化时序协同控制策略
2024-04-30邱宇琛刘先超李国庆
姜 涛,邱宇琛,刘先超,李国庆
(现代电力系统仿真控制与绿色电能新技术教育部重点实验室(东北电力大学),吉林省吉林市 132012)
0 引言
在全球能源低碳转型背景下,加快构建新能源占比逐渐提升的新型电力系统是实现中国能源低碳、清洁转型的关键[1]。随着风电、光伏等新能源发电在电力系统中渗透率不断提升,系统惯量下降趋势明显,由传统同步机主导的电网调频模式压力日益增大,系统频率稳定面临严峻挑战[2]。
近年来,借助风电场参与电力系统频率调节的技术手段愈加引起电网运行人员和相关专家关注。为应对系统扰动引发的频率波动[3],不少国家规定风电场应具备主动调频能力[4-5]。根据能量储备形式,风电场短期频率支撑控制策略可分为功率备用控制和转子动能控制两类。功率备用控制[6-9]通过变桨、超速或其组合控制使风机运行在次优跟踪模式以留取调频备用功率;而转子动能控制则借助风机控制灵活、可塑性强的优势,使其短时偏离最优运行点释放动能以实现调频,相较前者,该控制方式能保证较好的经济效益。
当前,风电机组参与系统频率调节的转子动能控制策略主要为构建与频率[10]、转速[11]、时间[12-13]相关的有功参考值功率函数,以在频率响应期间增发有功平衡负荷扰动。其中,基于模拟同步机的频率-功率函数控制设计最具代表意义,已得到广泛研究与应用,是众多调频方法的基础。但现有转子动能控制在调频结束后风机进入转速恢复过程易出现系统频率二次跌落(secondary frequency dip,SFD)[14],严重时甚至超过负荷扰动引起的最低点[15]。为解决该问题,文献[16-17]通过修改风机退出调频的运行轨迹,借助限转矩直线或平滑曲线等务类函数,规避传统恢复至初始运行点的“路径”,从而减小退出调频时产生的功率骤降量,以抑制SFD。但该方法延长了转速恢复时间,抑制效果过于依赖退出功率减载量或变系数函数的选取,在风速受扰场景下存在动态参数量化困难、运行轨迹易偏离预设状态的现象[18]。随着储能技术的发展,通过风电与储能协同为解决该问题提供了新思路,借助储能对风电场退出调频时的功率骤降量进行填补[19-20],可有效避免SFD,但由于储能存在成本高、频繁充放电将严重影响储能使用寿命等不足,降低了风电场运行的经济性。此外,综合考虑最大频率偏差和SFD 相斥关系的控制策略也较为常见,如优化相关调频参数[21-23]或 设 计 场 站 内 机 组 两 级 协 调 分 配 方 法[24-26]等。但现有的整定方法涉及的动态参数过多,在线应用较为困难,而所提机组两级分配方法的设计目前也仅限于单个风电场,对于数量众多、运行工况差异较大的多风电场并网系统未计及其对同步机组调频效果的影响[27],同时忽视了多场站间交互配合及“能量协同”这一潜力。事实上,随着电网中风电渗透率的急剧增长,如何针对含高风电渗透率的电力系统,设计实用、可靠的调频控制策略,协同不同工况的风电场站调频资源,实现有限调频能力的更大化利用亟待深入研究。
为此,本文以经典、实用化的综合惯量控制(SFPD)为研究对象,从场站交互机制出发,提出一种多风电场动态差异化时序协同的频率支撑控制策略。首先,基于SFPD 调频原理,从能量视角分析了多风电场调频存在的不足及最优“有功轨迹”实用性转化方案;然后,综合考虑系统频率关键指标和务风电场实际工况,逆向设计不同场站参与调频投入时序和任务分工;最后,通过3 机9 节点测试系统和某实际电网算例,验证了所提控制策略的有效性和实用性。
1 能量视角下调频问题描述与实用性转化
本章从能量视角分析多风电场采用SFPD 策略参与电网频率主动支撑存在的不足,并结合最优“有功轨迹”针对多风电场调频进行实用化转化。
1.1 风电SFPD 策略
稳态运行情况下,风机通常运行在最大功率点跟踪 (maximum power point tracking,MPPT)模式,机械功率PT与最优跟踪电磁功率指令PMPPT(v,ωr)保持平衡。当频率跌落超过死区时,风机SFPD 启动,其基本控制原理如附录A 图A1 所示。SFPD 控制包含下垂控制和虚拟惯量控制两部分,采集频率偏差和频率偏差变化率作为输入信号生成有功增量ΔP,其输出的电磁功率Pref(v,ωr)表达式为:
式中:Δf为系统频率变化量;kH和kD分别为SFPD 环节的惯性系数和下垂系数;ωr为风机转子转速;v为环境风速。
1.2 能量视角下多风电场调频问题描述
图1 建立了计及多个风电场的系统频率响应模型。图中:ρ为系统风电渗透率;kHi和kDi分别为风电场i的惯性系数和下垂系数;Hg为系统同步机组的等效惯性时间常数;D为系统的等效阻尼系数;R为同步机组一次调频的调差系数;Ts为汽轮机的惯性时间常数;Fs为汽轮机的特征系数;KL为负荷调节系 数;WFi表 示 风 电 场i;为务风电场有功增量总和,其中n为风电场总数。
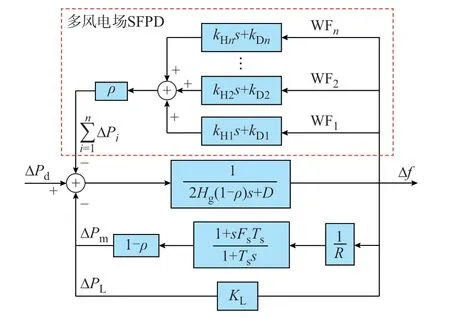
图1 含多风电场的电力系统频率响应模型Fig.1 Frequency response model of power system with multiple wind farms
由图1 可得,风机在动能释放阶段的系统等效时域转子运动方程可描述为:
式中:ΔPm为同步机有功输出;ΔPi为任意风电场i的有功增量;ΔPL为负荷调节变化量;ΔPd为负荷突增量。
为便于求解,参考文献[14],式(2)可进一步采用二阶微分方程描述系统频率f的变化过程:
进一步,得到从动能释放时刻ton开始,系统频率解析式为:
其中
对式(4)进行求导,可得最大频率偏差Δfmax及第1 次频率跌落时间tnadir1分别为:
式中:β=arctan(η1/k1)。
1)风电动能释放阶段(ton-toff)能量解析显然,根据式(4)可求出Δf(t)和dΔf(t)/dt,若忽略该过程机械转矩变化,进一步可得风机在任意时刻t释放的动能之和为:
式中:toff为动能释放阶段结束时刻;ΔPti为任意风电场i的机械功率变化量;h和γ为中间变量,其表达式如式(12)所示。
2)风电动能回收阶段(toff-tend)能量解析
风机退出调频后,沿着MPPT 轨迹进行转速恢复,可求得风机在动能回收阶段的能量之和为:
式中:tend为动能回收阶段结束时刻;ωi为任意风电场i等效机组转速;ωoffi和ωendi分别为任意风电场i等效机组退出调频时刻转速和最终稳态转速;kopt为最优功率跟踪系数;PMPPTi为任意风电场i的最优跟踪功率。
一次调频结束后,务风电场机组转子转速回到初始转速。根据能量守恒定律,可求ton-tend全过程风电场释放的动能之总和为:
式中:JWTi为任意风电场i的转动惯量。
根据式(10)至式(13)可得,若考虑系统受最大潜在负荷扰动ΔPd影响,务同步发电机的调差系数R、务风电场的惯量参数kH及下垂参数kD均已知,影响含多风电场电力系统调频效果两个关键问题为:
1)能量W1透支程度在高风电渗透率电力系统参数kH和kD累积影响下不断增大,“掩盖”了同步机调速器对于扰动幅度的判断,压缩了同步机有功支撑发挥空间,不能尽早激发其调频备用;
2)务风电场无时序差退出调频,等效于“第2 次负荷突增”,加大了转子“回收”能量W2的压力,而由同步机主导的低惯量频率响应难以在瞬时有效填补功率缺口,将导致频率再一次恶化。
1.3 能量视角下调频“最优”轨迹实用性转化
为解决1.2 节存在的能量释放呈现“无序”状态问题,本节结合文献[22]调频“最优”有功轨迹对传统SFPD 控制进行实用化改进。
由于不同“有功轨迹”形式的动能控制策略完成始末MPPT 点“路径”闭环代表着风机调频过程能量释放与回收的不同“充放”特性。因此,对于有限转子动能势必存在一条最优有功轨迹,可实现频率最佳提升效果,调频控制问题可等价为:
式中:ΔEk(t)为t时刻的可用动能;ΔEk,max为最大可用动能限值;Rmax为系统初始频率变化率安全阈值;Δfmax为系统频率跌落最大偏差。
参考文献[22],利用优化方法对式(10)进行求解,可刻画风电最优有功出力轨迹,其包含3个关键特性:
1)在初始阶段,有功出力近似于一阶惯性环节响应,目的在于激发同步机惯量响应;
2)在出现频率最低点之前,充分释放转子动能,风电出力增发到最值,减小最大频率偏差;
3)随后,风电有功出力缓慢平滑退出,降低SFD 风险。
本文为避免调频效果受限于机组层面调频参数的影响,结合上述3 个关键特性,从场站交互机制视角出发,综合考虑初始过程频率变化率阈值、一次跌落及SFD 的三重影响,多逆向时间尺度下设计不同工况风电场调频有功出力变化时序,优化风机调频过程能量“充放”特性,提升系统频率支撑响应性能。
2 多风电场动态差异化时序SFPD 控制
2.1 动态差异化时序协同SFPD 控制框架
结合风电参与电力系统调频需求,本文所提动态差异化时序协同SFPD 控制框架如图2 所示。按照“场群调频权责明晰、能量差异化协同配合”的思路,将地区电网风电场划分为3 个批次的风电场群(以下命名为:第1 批次风电场群、第2 批次风电场群和第3 批次风电场群)。其中,第1 批次风电场群主要用于改善频率初期跌落过程的变化率,第2 批次风电场群延时辅助提升第1 次频率跌落最低点,第3 批次风电场群缓解SFD。3 种风电场群的选取方法将在2.2 节展开探讨,按照动态差异化时序协同控制多风电场有功出力提供频率支撑效果,具体实现过程如图3 所示。图中:ΔPW为多风电场有功出力变化量。
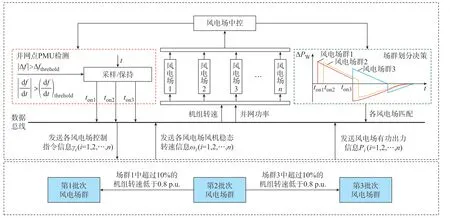
图2 多风电场协同SFPD 控制策略框架Fig.2 Strategy framework of collaborative SFPD control for multiple wind farms
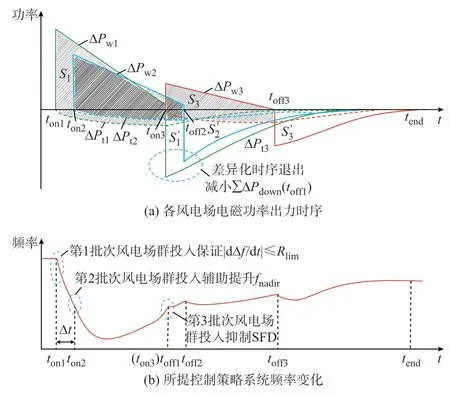
图3 所提控制策略有功输出时序Fig.3 Active output timing of proposed control strategy
当系统受扰后,在时刻ton1超过调频启动阈值Δfthrehold或| Δf/Δt|threhold时,务风电场调整电磁功率增量ΔPw参与调频。首先,由ton1计算第2、第3 批次风电场群惯量响应启动时刻ton2、ton3及闭锁时刻toff1、toff2、toff3分别为:
式中:Δt表示第1、2 批次风电场群投入时间间隔;ton-off为务风电场群惯量响应到闭锁时间间隔。
第1、第2 批次风电场群分别在t1和t2时刻投入,参与系统调频,分别释放动能S1和S2用于补偿系统功率缺额:
式中:ΔPw1(t)和ΔPt1(t)分别为第1 批次风电场群的电磁功率和机械功率;ΔPw2(t)和ΔPt2(t)分别为第2 批次风电场群的电磁功率和机械功率。
风电场群差异化时序投入目的在于:1)尽可能让同步发电机及时充分释放其有功备用;2)避免风电机群同一时刻退出而导致系统大规模功率缺额,一定程度缓解SFD。
第1 批次风电场群惯量闭锁后,第3 批次风电场群启动辅助前两批次风电场群完成转速恢复,释放S3填补能量缺口+:
式中:ΔPw3(t)和ΔPt3(t)分别为第3 批次风电场群的电磁功率和机械功率。
就调频效果而言,所提策略实质是通过多次“小程度频率跌落”替代了传统无协同控制策略较大程度SFD,这样做的出发点是既保证初始频率变化率在安全范围、提升系统频率最低点这一核心需求,又能合理有效地控制风电能量透支速度,从而减小风电转子能量回收电网的“反噬”作用。
需要指出的是,风电场调频能力取决于自然条件等因素,具有不确定性,故本文设计3 个批次风电场群的归类处于实时动态调整中,通过实时评估当前风电场的调频能力为实时更新调频场群分类提供依据,以保护风电场安全运行,实现差异化调频的效果。具体实现规则如下:若第1 批次风电场群出现超过10% 的机组的转速低于“预警”转速0.8 p.u.时,则第2 批次风电场群将调整某一高风速风电场至第1 批次风电场群,以保证惯量响应频率变化率的安全性。第3 批次风电场群同样具备该控制功能,这里不再赘述。
2.2 各批次场群选取方法
综合考虑系统最大潜在扰动场景和恶劣风速工况,本文所提参与系统频率主动支撑的务批次风电场群选取方法如下。
1)第1、第2 批次风电场群选取:第1、第2 批次风电场群选取须考虑系统在受到最大潜在扰动时,投入第1 批次或第2 批次风电场群后系统频率轨迹始终处于安全范围内[28]:
根据式(20)和式(21)可得系统频率轨迹约束下第1、第2 批次风电场惯量-下垂系数调频需求。
进一步,根据惯性-下垂系数需求可得第1、第2批次风电场群所释放动能需满足如下约束:
式中:kwindDi为风电场群内风电场i的下垂系数;η为安全裕度系数;K1和K2分别为第1、第2 批次风电场群可释放动能,其表达式如式(23)和式(24)所示。
式中:Hwindi为场群内任意风电场i等效机组惯量时间常数;ωi,min为场群内任意风电场i等效机组最低保护转速;N1和N2分别为第1、第2 批次场群风电场数量。2)第3 批次风电场群选取:第3 批次风电场群主要用于辅助前两批次风电场群的转速恢复,故第3 批次风电场群可释放的动能须大于前两批次风电场群在预设安全边界下释放的能量总和,即
式中:K3为第3 批次风电场群可释放动能;N3为第3批次场群风电场数量;λ为安全裕度系数。
结合系统风电场实际规模,可确定满足式(20)至式(25)的务批次场群的最小风电场数量N1、N2、N3。此外,考虑第1、第2 批次风电场率先进入调频阶段,易受风速不确定性影响,应优选规模较大的风电场作为第1、第2 批次场群,并留有足够的安全裕量,利用风电功率汇聚效应削弱恶劣风速工况影响,优选规模较小的风电场作为第3 批次场群。务批次风电场群调频容量应满足如下关系:
式中:Ewind1、Ewind2、Ewind3为务批次风电场群的调频容量大小。
2.3 关键参数选取
1)投入时间间隔Δt。第2 批次风电场群应在系统第1 次频率跌落前投入,且不低于最低限定时间差Δtlim,即
针对Δt的具体设定,参考文献[27],可结合地区电网规模、新能源渗透率、设定的惯性-下垂系数,通过仿真遍历务典型场景下不同扰动程度的Δt值,进而可拟合出适用不同典型场景下的Δt值。
在实际控制中,为实现动态调整Δt值,还须根据式(24)对系统扰动功率ΔPd进行预估[29]。
式中:H为系统惯量时间常数。
2)风电参与调频时间ton-off。本文所提控制策略由多个风电场群交替参与完成。因此,为保证所提控制策略具备较强鲁棒性,调频过程中应保证参与调频机组释放动能具有可持续性,故所设定惯量响应时间应相对偏小,依据并网电源一次调频导则[30],本文设定ton-off=10 s。
2.4 协同控制策略流程
本文所提多风电场频率主动支撑控制策略主要包括附录A 图A2 所示两个部分,详细说明如下:
1)风电中控离线预决策:正常情况下,多风电场按照预置顺序参与调频,务风电场每5 min 预测风速,并检测场站内机组运行工况,通过上述量测信息,将地区风电场群按照实际工况进行动态调整,量测信息每5 min 更新一次,保证控制策略的有效性。
2)多电场在线响应:当检测到频率/频率变化率超过阈值时,激活多风电场协同频率控制策略,风电场按照匹配的投入顺序依次参与系统调频。
3 仿真分析
本章分别以3 机9 节点测试系统和某实际电网为例,对所提控制策略有效性和实用性进行分析验证。
3.1 3 机9 节点测试系统
3 机9 节点测试系统拓扑结构如附录A 图A3 所示,该系统包含两台同步机组G1、G2 和3 个风电场WF1、WF2、WF3,每个风电场由一台等值风机替代,3 个风电场的机组数量分别为70、65、35,同步机组G1、G2 的输出功率分别为160 MW 和100 MW;L1、L2、L3 分 别 为90 MW、100 MW、110 MW 的负荷,风机最低转速限值为0.7 p.u.,最高转速限值为1.2 p.u.。
根据本文风电场分群原则,将WF1、WF2、WF3 分 别 设 置 为 第1、2、3 批 次 风 电 场 群,Rmax=-0.6 Hz/s。分别在不同负荷扰动场景和风速场景下对比以下3 种调频控制方式的效果:方法1——务风电场均不参与调频;方法2——务风电场采用传统SFPD 控制策略;方法3——务风电场采用所提控制策略。
1)不同负荷扰动场景
为验证所提控制策略在不同负荷扰动下的有效性,在WF1、WF2、WF3 风 电 场 风 速 分 别 为11.5、8.9、9.5 m/s 的场景下,设置系统在50 s 时分别突增50 MW 和80 MW 负荷,仿真结果如图4 和图5 所示。图中:Wmin表示转速最低限值,Wmin=0.7 p.u.。
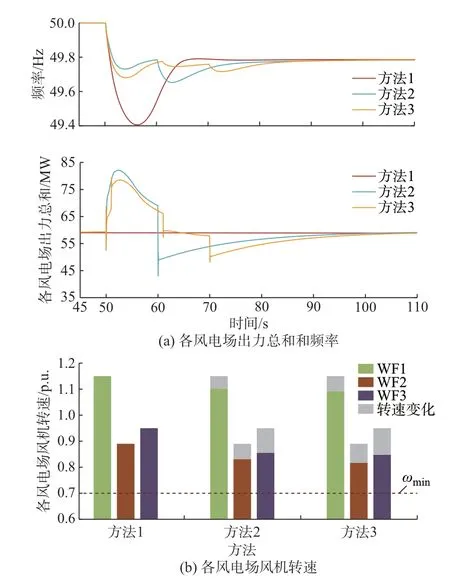
图4 负荷突增50 MW 时的仿真结果Fig.4 Simulation results when load suddenly increases by 50 MW
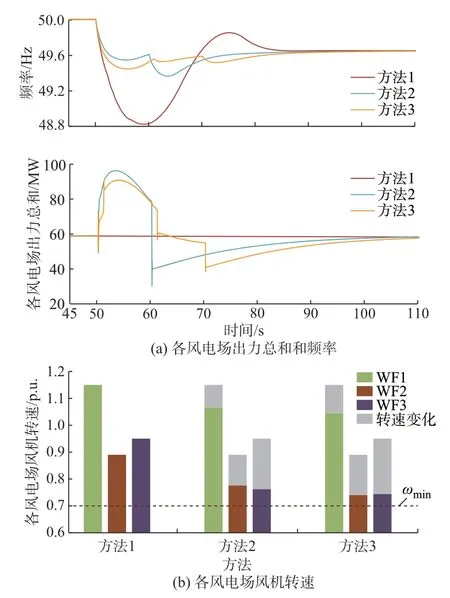
图5 负荷突增80 MW 时的仿真结果Fig.5 Simulation results when load suddenly increases by 80 MW
由图4 和图5 可知:当系统受到不同程度负荷扰动后,所提控制策略均能有效提升系统频率最低点,且相较方法1 和方法2 效果更佳,两种负荷扰动场景下系统频率最低点提升水平如附录A 表A1所示。
由图4 可知:当系统在50 s 时出现50 MW 负荷突增扰动时,首先由第1 批次风电场群增发9 MW有功功率,缓解系统频率下降趋势,将频率变化率控制在安全范围;然后,第2 批次风电场群滞后第1 批次风电场群1 s 后投入,该过程虽较方法2 导致系统频率偏差在前期过大,但其更大程度地加快了同步机组有功功率的释放,前2 个批次风电场群风机出力总和在53 s 附近达到最大值82.5 MW,有效提升了系统频率跌落最低点;最后,在第1 批次风电场群调频结束后,第3 批次风电场群快速启动,增发有功出力8.75 MW,协同同步机组填补前两批次参与主动支撑的风电场群的功率缺额,第1 批次风电场群在60~61 s 内实现了转速的部分恢复,减缓了能量骤降趋势,61 s 时第2 批次风电场群退出调频,系统频率产生小幅SFD,但远小于第1 次频率跌落值,调频过程中务风电场等值风机转速由1.15 p.u.、0.89 p.u.、0.95 p.u.分别下降至1.03 p.u.、0.730 p.u.、0.735 p.u.,并最终恢复到初始转速,未出现转速越限现象。所提方法相较方法1 的频率最低点可提升0.285 Hz,提升水平达47.58%;相较方法2 可进一步减小8.19%,有效避免了风机同时退出引起严重的SFD 问题。图5 所示系统发生80 MW 负荷扰动情况类似,这里不再赘述。
需要指出的是,方法2 较所提方法3 在频率响应过程10 s 内释放了更多能量,却并未取得更好的调频效果,出现该问题的原因是方法2 未实现风机转子动能更优释放,而本文所提控制策略设计的风电场分群差异化时序投入不仅实现了调频能量的合理配合。同时,相比于方法2 更大程度地利用风机的动能,实现了更好的调频效果。
2)恶劣风速场景
为进一步验证所提控制策略在恶劣风速场景下的有效性,设置一组风速斜坡扰动场景,50 s 时系统发生80 MW 负荷扰动,仿真结果如图6 所示。
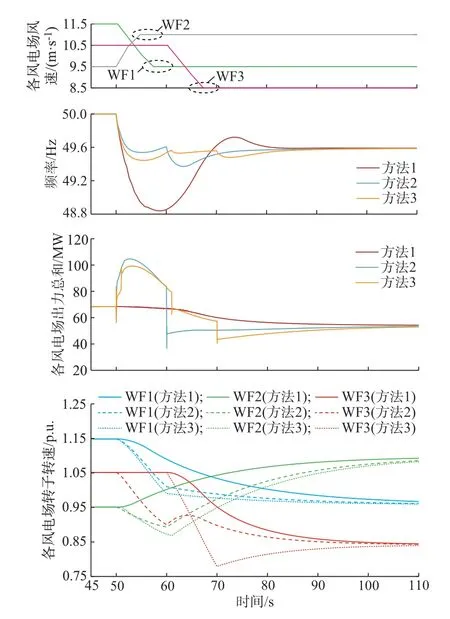
图6 3 机9 节点测试系统中恶劣风速场景的仿真结果Fig.6 Simulation results for severe wind speed scenarios in 3-machine 9-bus test system
由图6 的仿真结果可知:在恶劣风速场景下,3 种控制方法的系统频率第1 次分别跌落至48.889、49.590、49.493 Hz;方 法2 和 方 法3 第2 次 频 率 分 别跌落至49.421 Hz 和49.581 Hz。可以看出,尽管风电场的风速在调频期间均出现了变化,但所提控制策略相比其他方法仍具有良好的控制性能。所提方法在50 s 时,第1 批次风电场群风速由11.5 m/s 下降为9.5 m/s,风机出力处于变动中,但仍率先投入参与调频,快速增发15 MW 有功功率,有效遏制了系统频率快速下降趋势,使得系统频率变化率处于安全范围内;随后,第2 批次风电场群间隔1 s 后投入,辅助提升了系统频率最低点,前2 个批次的风电场迅速释放转子动能,在52.5 s 时2 个批次的风电场群增发出力至最大值98.5 MW,有效提升了系统的频率最低点,相比于方法1,频率提升了0.709 Hz,提升水平高达54.37%;最后,第3 批次风电场群在风速由10.6 m/s 下降为8.5 m/s 时投入,以辅助前两批次风电场群的转速恢复,在60 s 时增发有功功率10.5 MW,抑制系统SFD 效果明显,相比于方法2 的频率最低点仍可进一步提升12.44%。由此可见,所提方法在恶劣风速场景下,仍可有效利用风机蕴藏的调频潜力。
3.2 某实际电网仿真系统分析
为验证所提控制策略在实际电力系统中应用的可行性,本节进一步在中国某省西部电网仿真系统中对所提控制策略进行仿真、验证。
某省西部电网拓扑结构见附录A 图A4。该区域电网包含2 座火电厂和6 个不同规模大小的风电场。其 中,风 电 场LF(WF1)、RS(WF2)、XAL(WF3)、SL(WF4)、DB(WF5)和HLP(WF6)的额定功率分别为180、99、99、49.5、49.5、180 MW。
根据本文所提风电场群划分原则,设置风电场LF(WF1)和RS(WF2)为第1 批次风电场群;风电场XAL(WF3)、SL(WF4)、DB(WF5)为第2 批次风电场群;风电场HLP(WF6)为第3 批次风电场群,Rmax=-0.6 Hz/s。
1)最大潜在负荷扰动场景
设置系统在40 s 时发生300 MW 负荷扰动,务风电场初始相关参数如表1 所示,仿真结果如图7所示。
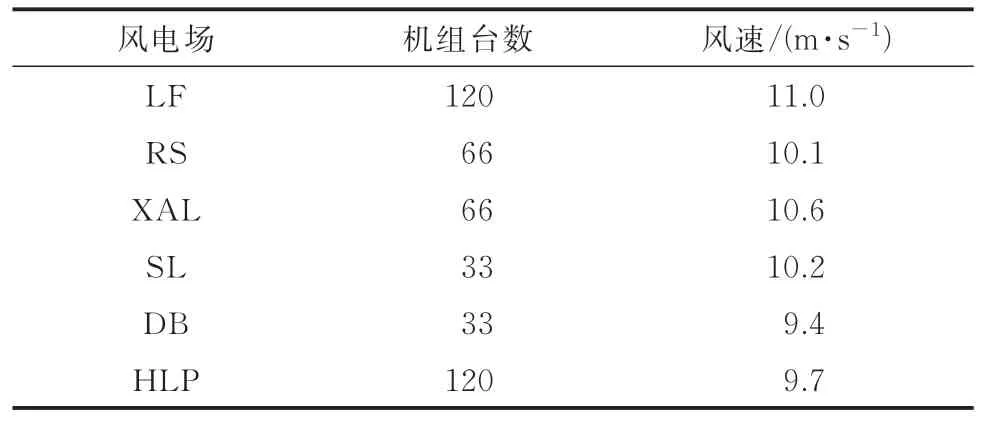
表1 各风电场运行状态Table 1 Operational status of each wind farm
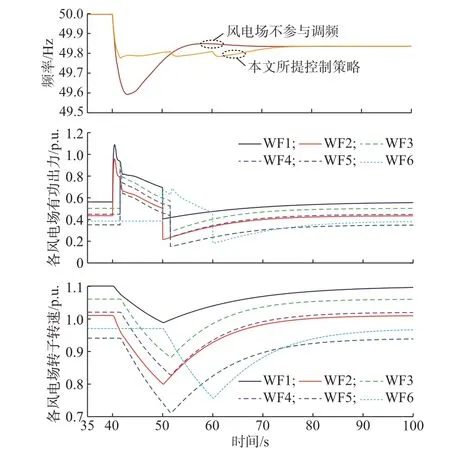
图7 最大潜在负荷扰动仿真结果Fig.7 Simulation results of the maximum potential load disturbance
由图7 仿真结果可知:系统在40 s 时发生300 MW 负荷扰动后,第1 批次风电场群中风电场LF(WF1)和RS(WF2)分别迅速增发出力97 MW和55 MW,在频率下跌阶段将频率变化率控制在安全阈值内;然后,第2 批次风电场群中风电场XAL(WF3)、SL(WF4)、DB(WF5)在第1 批次风电场群投入1.5 s 后投入,分别增发有功功率53 MW、27 MW、23 MW 有功功率,以提升系统频率最低点;最后,第3 批次风电场群中风电场HLP(WF6)投入,快速出力44 MW,用于减缓系统频率的SFD。在此过程中,风电场WF1 至WF6 等值风机转速分别由1.10、10.01、1.06、1.02、0.94、0.97 p.u.下降至0.99、0.805、0.735、0.88、0.715、0.75 p.u.,并最终恢复到初始转速,未出现转速越限现象。针对提升频率最低点这一难题,所提控制策略相较风机无控制措施可减小频率偏差0.201 Hz,最低点提升水平高达44.96%,且SFD 抑制效果明显。由此可见,所提策略在实际电网中具有良好的适用性,务批次风电场群可持续配合,总体改善系统频率响应特性。
2)恶劣风速场景
为进一步验证所提控制策略在实际电网恶劣风速场景下的适用性,设置以下2 组恶劣风速场景:恶劣风速场景1——第1 批次风电场群中风电场RS 风速过低,调频能量存在潜在不足;恶劣风速场景2——务风电场调频期间风速斜坡变化。
设上述2 组恶劣风险场景下系统均在40 s 时出现300 MW 负荷扰动,仿真结果如图8 所示。可以看出:在第1 批次场群中,风电场RS(WF2)的风速为7.5 m/s,当机组转速低于“预警”转速0.8 p.u.时,为防止最大潜在扰动造成第1 批次风电场群调频能量不足,第2 批次风电场群由预置状态进入动态调整状态,风电场XAL(WF3)由第2 批次风电场群调整至第1 批次风电场群,风电场LF(WF1)、RS(WF2)和XAL(WF3)率先快速释放动能,分别增发79、44、42 MW 功率,阻拦频率下跌趋势。风电场RS(WF2)由于本身调频潜力有限,在未达到频率响应终止时间时转速已达到转速限值0.7 p.u.,在42 s 退出调频,但在风电场XAL(WF3)支撑作用下未引起系统频率波动。在50 s 时,风电场HLP(WF6)投入并增发出力59 MW,以辅助前2 个批次的风电场群转速恢复。相较无控制措施,所提控制策略可减小最低点频率偏差0.185 Hz,提升水平高达47.04%,同时SFD 效果抑制明显。
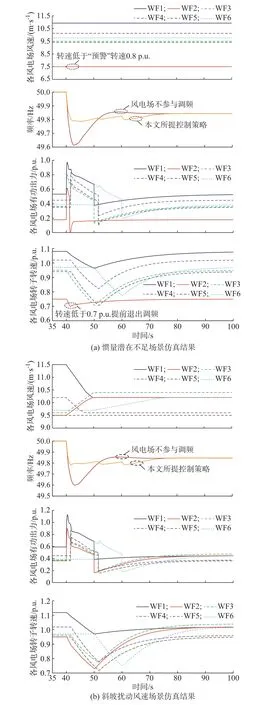
图8 某实际电网仿真系统中恶劣风速场景的仿真结果Fig.8 Simulation results of severe wind speed scenarios in a case of a real power grid
在风速斜坡变化场景下,尽管多个风电场风速均处于上升或下降趋势,所提控制策略调频效果依旧表现良好,务风电场可持续差异化时序输出有功功率,交替完成调频。相较无控制措施,频率最低点频率偏差可减小0.191 Hz,提升水平高达47.2%。
综上所述,本文所提控制策略可有效改善实际电力系统频率响应特性,对于含数目众多的风电场并网系统频率的提升效果显著,通过场站间动态差异化投入可有效抑制系统SFD。
需要指出的是,电力系统是一个强非线性系统,系统故障场景和运行方式多变,本文所提方法虽然对典型场景下控制策略的适应性进行了校核,但仍可能不适应某些低概率的特殊运行场景。对此类问题,可在已整定的多风电场调频控制方案的基础上进一步优化,以提高所提策略的适应性。
4 结语
本文针对新能源高渗透的电力系统调频问题,提出一种多风电场动态差异化时序协同频率支撑控制策略。通过改进的3 机9 节点测试系统和某实际电网算例对所提控制策略进行了分析、验证。相关结论如下:
1)结合最优动能释放曲线对“无序”释放的调频能量进行重新优化,第1 批次风电场群保证了初期过程惯量响应安全,第2 批次风电场群激发同步机惯量响应并辅助提升频率最低点,第3 批次风电场群减缓转速恢复过程的“反噬”作用;
2)在不同负荷扰动、风速场景下,所提控制策略可合理释放和回收转子动能,在保证初期过程频率变化率安全情况下,有效提升了系统频率最低点并抑制SFD,具有良好的鲁棒性;
3)实际电网算例验证了所提控制策略的调频效果显著,可为电网调度人员制定调频控制策略提供参考,具有一定的工程应用价值。
需要说明的是,所提控制策略是针对地区风电场站数目众多的并网系统所设计的一种固定调频控制参数的场站交互机制,其本身是有限范围内的“优化”调整,而非最优设计。本文后续将在此基础上进一步研究多风电场协同最优频率控制策略。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。