基于扩频多址的差转游标测距方法与应用
2024-04-30刘庆元王佳钰史学威杨文波陈祝明
刘庆元,王佳钰,史学威,杨文波,陈祝明
(电子科技大学长三角研究院(衢州),浙江 衢州 324003)
0 引 言
面向复杂工业现场的定位系统是工业安全系统的重要组成部分。与办公、生活等商用和民用的通信环境相比,工业场景的无线通信环境更加复杂[1]。以危险化学品生产环境为例,危险化学品的毒害、爆炸、腐蚀等性质会对定位设备造成影响,生产环境结构复杂,穿管布线具有很高的施工成本,还可能增加新的安全隐患,定位设备的高频维护也会增加企业运维成本。为了加强对安全生产的监管、及时发现隐患,需要对危险化学品生产环境进行人员定位、智能巡检。《工业互联网+危化安全生产》[2]要求规范巡检流程,提升巡检数字化、智能化,对巡检作业人员要实时定位,并且实现多人巡检定位[3]。因此,面向工业现场的定位系统要做到低功耗、低成本、低安装施工量,还需要具有很高的定位精度,能够实现多址定位。
传统室内定位系统无法满足复杂工业现场的定位需求,如蓝牙定位的精度不够、超宽带定位成本高等[4]。目前,室内定位系统是以距离测量为基础的,高精度的距离测量决定了高精度的定位,基于游标法[5]的转发式定位系统可以通过测量时间间隔来实现高的测距精度。这种系统主要由询问器和转发信标组成,其转发信标电路结构简单,易于实现低成本和低功耗,但在多个询问器同时工作时无法正常测距。因此,询问器需要具备多址访问技术来解决这一工程问题。
直接序列扩频(Direct Sequence Spread Spectrum,DSSS)技术可以采用正交的伪随机(Pseudo-Noise,PN)码序列来实现码分多址[6]。PN码具有类似白噪声的相关特性,干扰信息与伪随机序列不相关。在接收端经过扩展后,落入信号频带内的干扰信号功率大幅降低,所以扩频系统抗干扰、抗多径的能力得以增强。扩频码的选择直接影响扩频系统的性能,其类型有m序列、Gold序列等,本文方法采用由两个m序列构成的具有良好正交性能的Gold序列作为扩频码。
本文基于复杂工业现场定位的实际需求,综合游标法和DSSS技术,提出了一种基于扩频多址的差转游标测距方法并构建了相应的测距系统。
1 游标测距法原理及其转发测距时的问题
传统的游标测距方法是基于游标测时的,使用游标法测量时间间隔[7],进而计算出距离。游标法测时的原理[8]如图1所示。

图1 游标法测时原理Fig.1 Principle of time measurement using vernier method
游标法测时需要有两个时钟信号,这两个时钟信号的频率和周期之差都极小,较高频率信号为主时钟,其周期为T1,较低频率信号为游标时钟,其周期为T2。每次当游标时钟上升沿到来时,相对于主时钟上升沿都会产生一段较小的延迟:
ΔT=T2-T1
(1)
然后发射端发送与主时钟完全同步的脉冲信号,经过传输时延t之后接收方收到该信号,t即是待测的短时间间隔。开始测量后发射端持续发射脉冲信号,当游标时钟上升沿到来时,对发射脉冲上升沿进行鉴别,如果它们发生重合,则开始对游标时钟进行计数。此后便关注接收脉冲,当游标时钟上升沿每次到来时,对接收脉冲上升沿进行鉴别,如果它们发生重合,则立即停止计数,假设游标时钟计数结果为K。这就是一次完整的测时过程,可知过程耗时T为
T=KT2=KT1+t
(2)
可以得出时间间隔t=KΔT。因此,测量出t就可以计算出待测距离,而游标法测距的测量精度就取决于游标法测量时间间隔的精度,为主时钟与游标时钟周期的差值ΔT。若主时钟与游标时钟周期无限接近,则测量精度理论上可以达到很高的水平[9]。
这种传统的游标测距法只适用于单一询问器和转发信标的场景,而在实际应用场景中,往往会存在多个询问器和多个转发信标,这就要求询问器不仅能够接收和识别自身发射的测距脉冲,还要能够识别出是哪一个信标转发的。
2 基于扩频多址的差转游标测距系统
针对传统游标测距法应用中的问题,本文提出了一种基于扩频多址的差转游标测距方法及测距系统。系统在询问器中增加了DSSS技术,采用31位Gold序列对信号进行直接序列扩频处理,以提高抗干扰能力,区分不同询问器的测距信号[10];在转发信标中采用差频转发技术,利用不同的转发频率来区分不同的转发信标。测距系统的组成如图2所示。
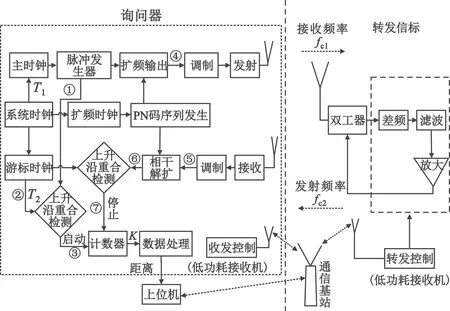
图2 系统组成框图Fig.2 Block diagram of system composition
询问器包括时钟控制模块、扩频/解扩模块、调制/解调模块、射频收/发天线、游标时钟计数器以及数据处理模块;转发信标包括差频模块以及转发控制模块;通信基站用于对询问器和转发信标的通信和调度。
系统的工作流程如下:
首先,询问器的时钟控制模块产生周期相近的主时钟和游标时钟信号,并且产生与主时钟信号同步的主时钟脉冲作为测距信号。假设主时钟和游标时钟的频率分别为fclk1和fclk2,且fclk1>fclk2,两频率十分接近,可知主时钟和游标时钟的周期分别为T1=1/fclk1和T2=1/fclk2,则游标法分辨率为两周期差ΔT=(T2-T1)。当主时钟信号和游标时钟信号的上升沿重合时启动游标时钟计数器。计数启动脉冲初始化保持低电平,如图3所示。当主时钟脉冲与游标时钟的上升沿重合时,上升沿对应时刻就被作为启动计数的时刻。计数启动脉冲置为高电平,激励游标时钟计数器开始计数。
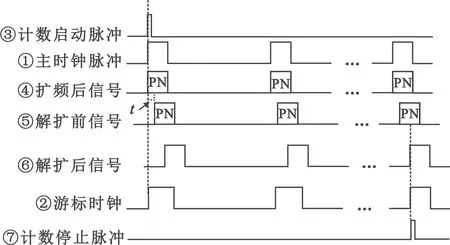
图3 时间测量过程Fig.3 Time measurement process
系统采用正交的Gold码进行扩频,要求扩频码的位数满足多址测距的要求,能够区分多个不同的测距信号。研究以正交Gold序列作为扩频码的扩频系统的误比特率,绘出图4所示的误比特率-信噪比曲线,分析多址对扩频的影响。
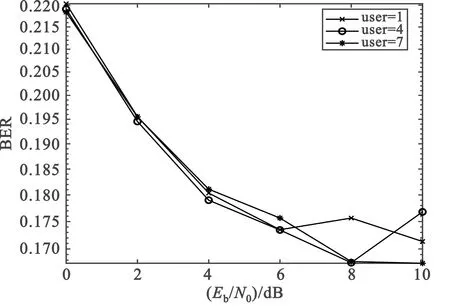
图4 正交Gold序列性能曲线Fig.4 Performance curve of orthogonal Gold sequence
正交Gold序列之间互相关值约为0,性能基本不会随用户数增加而下降。本文的系统采用正交的Gold码作为扩频码,系统可以区分不同标签的测距信号,性能基本不会受多个地址的影响。
将Gold序列与主时钟信号生成的脉冲序列进行直接序列扩频即可得到扩频后的测距信号,如图3中扩频后信号,已调制后发射载波频率为fc1的测距信号。
转发信标持续接收载波频率为fc1测距信号,对测距信号进行差频和放大处理,差频后发射的测距信号载波频率为fc2,采用双工器实现收发信号的隔离。
询问器接收端持续接收载波频率为fc2,测距回波信号,对接收到的信号进行解调处理,然后对整形得到的数字信号进行相干解扩。解扩采用的是数字匹配滤波器[12],首先要预先存储接收整数周期的参考序列,然后接收序列逐位移入移位寄存器,两组移位寄存器的对应比特进行模2加,然后将模2加的结果累加。只有当对应寄存器的数据完全一致时,输出最大值N(N=2n-1),而当其他的正交PN码序列输入的时候,累加的结果为-1。然后经过门限比较电路,根据累加的结果与预设的门限值进行比较判决,从而恢复出主时钟脉冲。
计数停止脉冲初始化为低电平,如图3,当解扩后信号与游标时钟信号的上升沿重合时,将计数停止脉冲置为高电平,令计数器停止计数。解扩前信号与主时钟脉冲存在着时延t,即待测量的时间间隔。根据游标法原理,游标法是以牺牲时间为代价来提高时间测量精度的,每经过一个周期,游标时钟与解扩后测距信号的上升沿之间的间隔就缩小ΔT,所以最终的计数结果乘以ΔT就等于待测时间t。
假设计数器的计数结果为K,通过计数器测得的计数结果可以计算出待测时间t。由游标法原理得
t=K(T2-T1)=KΔT
(3)
式中:ΔT为周期差;t即测距信号的传播时间。
当测量出测距信号的传播时间后,就可以计算出距离。询问器与转发信标之间的距离为t/2时间内测距信号的传播距离d为
(4)
式中:v即测距信号在空气中的传播速率,等于光速。由所测传播时间计算出距离后,询问器通过通信基站将距离信息发送给上位机进行显示,完成一次测距。
为了验证系统DSSS扩频和游标测量性能,搭建了系统基带模块进行时间测量精度实验。实验参数如表1所示。

表1 实验参数Tab.1 Experimental parameters
采用数字延时器作为基准延时,利用多组时间延时进行实验,测量结果如表2所示。
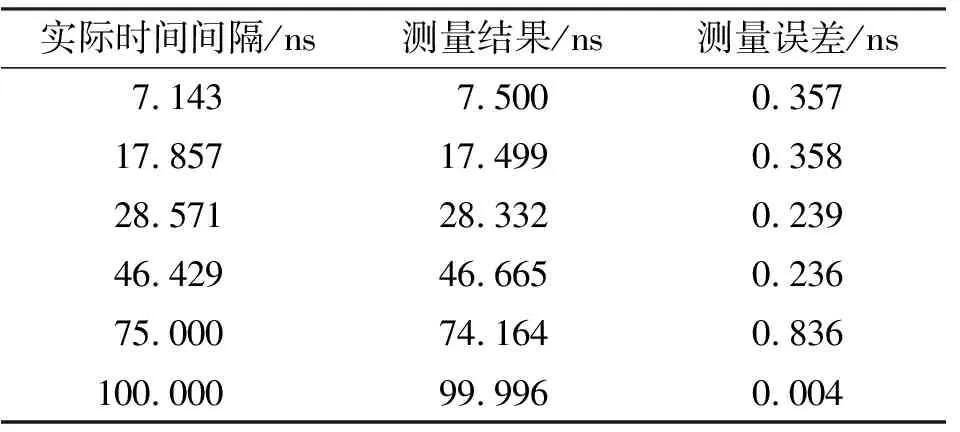
表2 实验测量结果Tab.2 Experimental measurement results
目前实验测量最大误差约等于理论误差0.833 ns,对于光速传播的射频信号,对应的测距精度约为25 cm,这种亚米级的精度测距基本满足了大多数工业场景和室内场景的人员定位管理需求。
3 基于扩频多址的差转游标测距系统的应用
在工业生产中,安全是十分重要的,巡检能够及时发现安全隐患,提高生产的安全性。巡检人员在巡检过程中也可能遇到危险情况或是进入危险区域,对巡检人员进行定位能够规范巡检流程,获取实时位置,便于统一管理。这种巡检人员定位管理的特点在于:一是生产现场区域大,需要布设的转发信标数量多,要求转发信标成本低,施工简单,运维方便;二是巡检人员少,行走速度较慢,所佩戴的定位标签数量少,对其成本、功耗和定位的数据率要求都不高;三是定位精度要求高,能够正确地获取巡检人员的行走轨迹。
目前工业生产中使用的基于Ubeacon信标的定位系统,也可以实现亚米级高精度定位[13]。该系统采用UWB定位技术和Ubeacon信标,Ubeacon信标如图5所示,可以采用内部电池供电、外部无线信号传输,实现快速部署。
由图5中Ubeacon信标电路与转发信标电路结构的对比可以看出,基于DW1000的Ubeacon信标需要通过时钟控制模拟接收机、发射机,同时还包含数字收发信机、电源管理、主机接口与状态控制器等模块。基于CC1352P的转发信标结构主要分为4个部分:主CPU、RF Core、通用硬件模块以及传感器接口。但是相比转发信标,Ubeacon信标电路结构更加复杂,发射超宽带信号会有更高的功耗,同等条件下,Ubeacon信标续航时间更短。
本文提出的基于扩频多址的差转游标测距系统采用了游标法获取高的定位精度,转发信标采用简单的差转电路结构,因此其成本和功耗都很低;采用电池供电和无线通信调度后,安装施工和运行维护的成本也很低,非常适合于工业现场的巡检人员定位管理。
系统由以下核心设备组成:询问标签(即询问器)、转发信标和定位系统上位机。询问标签由巡检人员携带,转发信标布设在工业现场的固定位置,上位机与询问标签通过通信基站进行通信。系统结构如图6所示。

图6 定位系统结构Fig.6 Structure diagram of the positioning system
在工业巡检路线上布设转发信标,当转发信标接收到通信基站发来的调度信号后开启转发功能。巡检人员佩戴询问标签按规划路线进行巡检时,所有的询问标签发射相同载波频率fc1的测距信号,不同的询问标签采用不同的PN扩频码区分。各个转发信标具有不同的差转频率fc21,fc22,fc23,询问标签采用单通道调谐接收机依次接收不同信标转发的载波频率fc21,fc22,fc23的测距信号。
以图6中的询问标签1为例,通过发射3组测距信号以获得3个转发信标的回波信号进行测距,获取3组距离信息s1,s2,s3,3个信标位置坐标已知为(x1,y1),(x2,y2),(x3,y3),解方程组
(5)
即可得到询问标签1的唯一位置坐标(x0,y0)。
4 结 论
本文提出了一种基于扩频多址的差转游标测距方法,采用游标法实现高精度测距,采用DSSS技术以正交的PN码区分发射载波频率相同的不同标签,采用不同的差转频率区分不同的转发信标。这种方法使得转发信标结构简单,成本低,功耗小,易于电池供电;采用无线通信方式后很容易大规模地布设于工业现场以进行人员的定位管理,特别适合于危化安全生产等领域巡检人员高精度定位管理的要求。