融合残差SENet的毫米波大规模MIMO信道估计
2024-04-30刘庆利杨国强张振亚
刘庆利,杨国强,张振亚
(大连大学 a.信息工程学院;b.通信与网络重点实验室,辽宁 大连 116622)
0 引 言
为了满足5G无线通信系统的更高要求,将毫米波与大规模多输入多输出(Multiple-Input Multiple-Output,MIMO)系统相结合已成为一种重要的物理层技术而受到了广泛研究[1]。同时,在进行信号技术处理时,精准地估计出信道状态信息(Channel State Information,CSI)对于充分利用毫米波带宽和大型阵列天线增益至关重要[2]。因此,研究在大规模MIMO系统中进行精准的信道估计具有重要意义。
近年来,随着无线智能通信研究的逐步深化,神经网络已经在资源分配、调制分类、信号检测、信道编码等方面展示出优异的性能[3]。有学者将信道矩阵看成二维图像[4-5],利用神经网络从接受的信号中恢复原始信号完成信道估计。文献[6]针对波束域毫米波大规模MIMO系统提出了一种基于学习去噪的近似消息传递的神经网络,该神经网络将降噪卷积神经网络(Denoising Convolutional Neural Network,DnCNN)[7]融合到了LAMP(Loop-mediated Isothermal Amplification)算法中,从噪声信道中去除噪声恢复原始信号,然而其网络训练时针对的是特定的噪声集,因此只能在小范围的信噪比(Signal-to-Noise Ratio,SNR)下完成信道估计。文献[8]提出了一种改进的卷积盲去噪网络,通过引入噪声估计子网、非盲去噪子网,能够在较大的信噪比范围下完成信道估计,提高了对噪声信道的鲁棒性,然而该方法仅将导频看作为单位向量完成信道估计而忽略了导频信息,这极大地限制了其网络的适用性和实用性。文献[9]通过引入条件生成对抗网络(Conditional Generative Adversarial Network,CGAN),将导频作为条件和接收信号一起输入到生成网络中完成信道估计,提高了网络的实用性,然而其网络并未对噪声进行单独处理,在噪声条件下估计精度并不理想。
上述基于卷积神经网络(Convolutional Neural Network,CNN)的信道估计算法忽略了导频所包含的先验信息,实用性较差,而基于CGAN的算法则没有考虑到光线追踪户外场景下的噪声干扰,在低SNR下精度较差。针对上述问题,本文提出了一种融合残差挤压激励网络(Squeeze-and-Excitation Network,SENet)的条件生成对抗网络(Residual SENet-Conditional Generative Adversarial Network,RSENet-CGAN)。该网络以CGAN为基础,将导频作为网络的条件输入,并将SENet网络模块融合到条件生成对抗网络的生成器中,通过SENet网络中的注意力机制来抑制噪声特征,降低噪声干扰。在户外光线追踪场景的仿真实验下,该算法取得了比正交匹配追踪(Orthogonal Matching Pursuit,OMP)、CNN、DnCNN和CGAN更高的估计精度。
1 系统模型
本文考虑一个典型的时分双工的毫米波大规模MIMO系统,在基站侧的上行信道进行信道估计。系统模型如图1所示,该系统具有K个配备单天线的用户和配备有M个天线的基站。
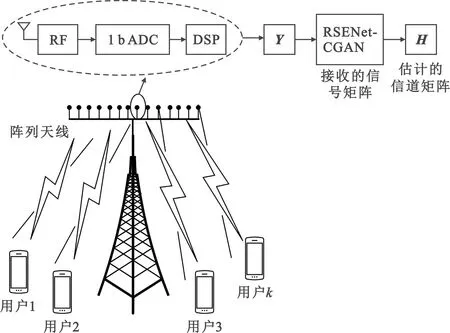
图1 MIMO系统模型Fig.1 MIMO system model

(1)
(2)
(3)
式中:B表示系统带宽;d表示天线间距。K个用户的毫米波信道矩阵H定义为
H=[h1,h2,…,hk,…,hK]
(4)
式中:H∈M×K。使用来自用户侧的导频信号在基站端执行信道估计,K个用户同时向BS发送长度为τ的导频序列,然后在BS端一位量化之后接收的信号Y表示为
Y=sgn(HΦ+N)
(5)
式中:Y∈M×τ;Φ∈K×τ是K个用户的导频序列,Φ中每个用户的导频是相互正交的;N∈M×τ是从高斯分布中提取的基站处的噪声矩阵。符号函数sgn(·)是一个用于一位量化的元素操作,定义如下:
(6)
Y是一个量化信号,其元素从集合{1+j,1-j,-1+j,-1-j}中取值。因此,信道矩阵H可以看作为一个具有双通道的二维图像,两个通道分别表示信道的实部和虚部,那么信道估计问题就可以转化为从接收信号的二维图像中恢复信道矩阵的二维图像的过程。本文采用RSENet-CGAN网络从已知的导频序列Φ和高度量化的接收信号Y中恢复信道矩阵H,同时考虑在户外光线追踪场景下环境噪声对信道的影响,采用卷积神经网络中的图像去噪技术去除噪声干扰,并对网络模型进行训练和测试,完成信道估计。
2 基于RSENet-CGAN的信道估计
信道估计的过程主要由残差去噪和基于CGAN的信道估计两部分构成:首先通过残差SENet完成对接收信号的残差去噪,去除噪声干扰;然后采用训练好的CGAN网络进行信道估计,根据RSENet网络传入的接收信号和导频序列恢复原始信号,完成信道估计。
2.1 基于RSENet的图像去噪网络
SENet[11]是一种基于通道注意力机制的网络模型,通过SENet可以从大量的图像信息中提取更为有效的特征信息,极大地提高了图像处理的效率。同时由于网络层数的加深,神经网络容易出现梯度消失、网格退化的问题,将ResNet[12]的残差结构引入到SENet模型中,构建了一个RSENet的网络模型。
RSENet的网络结构如图2所示,其网络主要分为挤压、激励、放缩和残差操作4部分。

图2 残差SENet模块结构Fig.2 Structure of residual SENet module
1)挤压操作
首先通过池化操作对输入特征图X∈H×W×C进行全局池化操作。该操作通过在空间维度H×W上聚合特征映射为一个通道描述符的一个实数,该实数具有全局的感受野。该挤压操作能够获取到输入的通道特征以及空间关系,压缩后的多维统计量z∈C的第c个元素为
(7)
式中:uc(i,j)为X的第i行第j列的元素。
2)激励操作
通过两个全连接层获取非线性的跨通道的交互,同时通过降低维度来限制网络模型的复杂性。全连接层通过权重参数W生成每个通道的权重,最后通过Sigmod激活函数将权值限制到0与1之间,即
s=Fex(z,W)=σ(g(z,W))=σ(W2δ(W1z)
(8)
式中:W1和W2为两个全连接层的参数;δ(·)与σ(·)为ReLU和Sigmoid激活函数。得到的s为X各个通道重要程度的权重。
3)放缩操作(Scale)

xc=Fscale(uc,Sc)=Scuc
(9)
(10)

4)残差操作

2.2 基于条件生成对抗网络的信道估计


图3 模型整体流程结构Fig.3 The overall process structure of the model
2.2.1 生成网络
RSENet-CGAN的生成器网络模型结构如图4所示。网络模型引入U-Net[13]架构,与常用的编码器-解码器结构相比,U-Net架构增加了跳跃连接,将编码器块和解码器块的特征图通过级联层进行组合,以保留特征图在不同分辨率下的像素细节,在改善图像细节方面有着较好的效果(每个残差块通过跳跃连接将前端的特征信息传递到后端,防止网络退化)。整个U-Net架构使用了3个编码块和4个解码块,每个编码块由1个卷积层、1个BN和1个LeakyReLU激活函数层构成,每个解码块由1个反卷积、1个BN和ReLU构成。
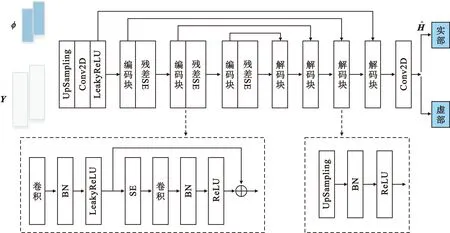
图4 RSENet-CGAN的生成网络Fig.4 The generative network of RSENet-CGAN
低分辨率信道图像首先通过编码块的卷积操作对信道图像进行特征提取。BN层的批量归一化使得每一层有近似相同的分布,有效避免消失梯度问题,能够提高网络模型的收敛速度。在解码块中通过反卷积逐层放大图像尺寸同时通过跳跃连接保留卷积前的像素细节来降低图像放大时图像细节的丢失,恢复超分辨率信达图像。
编码块和解码块采用不同的激活函数:编码块采用ReLU作为激活函数以更好地挖掘信道特征信息;由于解码块中的反卷积计算量更大,因此采用收敛速度更快的LeakyReLU作为激活函数。同时,为了降低噪声对于网络模型的干扰,提高网络的泛化能力,在编码块后引入SENet网络模块,通过SENet的通道注意力机制提高对信道图像重要特征的提取,并通过激励和放缩操作降低噪声特征权重来抑制噪声干扰。最后将残差网络融入到SENet中,能够解决由于网络层数的加深而导致梯消失,网格退化的问题。
2.2.2 判别器网络
原始CGAN中判别器是一个简单的卷积神将网络,对于生成器生成的信道图像的判别效果不佳。为了提高判别器网的准确度,使用了判别器中的patch结构[14]来识别输入细节。与常规判别器不同,常规判别器将输入映射到一个单个标量输出表示真或者假,而使用patch结构的判别器将输入映射到感受野,其中每个元素表示输入的部分是真的还是假的。
如图5所示,判别器网络的前端由1个卷积层、1个LeakyReLU层、1个Droupt层和3个编码块组成,1个编码块由1个卷积层、1个BN层、1个LeakyReLU层和1个Droupt层构成。针对在训练时判别器网络很容易出现过拟合现象,在编码块中引入了Dropout机制[15]来解决这一问题。具体做法是在每个编码块的LeakyReLU层后添加Droupt层,参数dropout_ratio的值设置为0.25,即经过Droupt层后25%的输出值会被网络抛弃,即将激活值置零,从而减小网络的大小,有效防止网络过拟合,提升网络的泛化能力,其中卷积层的卷积核大小全部设置为3×3。在最后一层,使用卷积层代替全连接层来获得感受野,然后平均感受野的所有响应,以提供判别器的最终输出。

图5 RSENet-CGAN的判别网络Fig.5 The discriminant network of RSENet-CGAN
2.2.3 损失函数的设计
原始CGAN网络的生成器部分只添加了一个条件约束,这使得网络会过于自由,然而在模型训练阶段仍然会出现模型崩塌,生成的信道图像不稳定的问题。为了有效提高模型训练的稳定性,在原始CGAN模型的损失函数中添加了一个回归损失项,最终要计算的目标损失是
(11)

对抗网络损失项用于提升生成器和判别器的准确率,引入的回归损失项用于提高生成器生成的信道图像与真实信道图像的相似性,进而降低网络模型的不稳定问题。其中对抗网络的损失如式(12)所示:
LCGAN(Gψ,Dθ,Y,H,Φ)=
E[lgDθ(H,Φ)]+E[lg(1-Dθ(G(Yψ,Φ)))]
(12)
回归损失主要分为L1损失与L2损失:L1损失又叫最小绝对值误差,主要用于计算实际值与预测值之间的绝对值之和;L2损失又叫最小平方误差,主要用于计算实际值与预测值之间的平方差之和。L1损失相较于L2损失收敛速度慢且没有稳定的解,因此采用收敛速度更快的L2损失作为回归损失,表达式为
L2=E[‖H-Gψ(Y,Φ)‖2]
(13)
式中:H表式信道矩阵;Gψ(Y,Φ)表示在输入接收信号Y和导频序列Φ后生成器生成的信道矩阵;‖H-Gψ(Y,Φ)‖2表示真实的信道矩阵与生成的信道矩阵的平方差。网络模型的优化过程即使得L2损失不断减小的过程。
3 仿真设计与结果分析
3.1 仿真数据与参数
仿真配置:GPU为GeForceRTX2080Ti;CPU为Intel i5-9400F;内存为32 GB;操作系统为Ubuntu 19.10;深度学习框架为Tensorflow2.0。训练使用的数据集通过DeepMIMO生成,场景采用的是户外大规模MIMO的毫米波光线追踪场景。该场景是一个十字路口,水平街道长600 m,宽40 m,垂直街道长440 m,宽40 m。两条街道两侧都有楼房,水平街道两侧建筑物的底座尺寸为30 m×40 m,垂直街道建筑物的底座为60 m×60 m。具体的仿真参数设置见表1。

表1 室外大规模MIMO仿真信道参数Tab.1 Outdoor massive MIMO simulation channel parameters
在参数设置时将用户数k固定为32,根据设置的天线数量可以生成4个信道矩阵H分别为64×32,128×32,192×32和256×32的数据集。接收信号Y的相应数据集由信道矩阵数据集和使用1 b量化的导频序列生成,同时在接收信号中加入不同信道比的高斯白噪声。数据集按照70%,20%,10%划分为训练集、测试集和验证集。DeepMIMO根据场景参数生成用户与天线阵列之间的信道向量。

(14)
式中:‖·‖表示矩阵范数计算;E表示期望。通过计算10lg{·}来获得NMSE,NMSE的值越小表示模型估计的精确度越高。
3.2 仿真结果分析
图6比较了在SNR为0 dB时,基于RSENet-CGAN的毫米波大规模MIMO系统中导频序列长度和神经网络的层数对于信道估计精度的影响。从图中可以看出,RSENet-CGAN的估计误差随着神经网络层数的增加而降低,与CGAN网络收敛于8层相比,本文所提出的基于RSENet-CGAN的算法由于引入了残差网络加快了网络的收敛速度,使得网络收敛于7层内,降低了网络模型的复杂度。
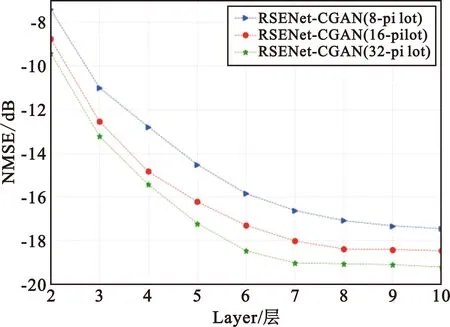
图6 不同网络层数下的NMSEFig.6 NMSE under different network layers
图7比较了CGAN与本文所提的RSENet-CGAN方法在不同的迭代层数下网络模型的损失,其中SNR=0 dB,导频序列长度为8,其他参数保持一致。在不同的迭代次数下,基于RSENet-CGAN的网络损失要优于CGAN,并在50次epoch后达到最优的网络损失后保持稳定。

图7 SNR=0 dB时不同训练次数下的模型损失Fig.7 Model loss under different training times when SNR=0 dB
图8比较了基站天线数对于网络模型估计精度的影响,可以看出,随着基站天线数量的增加,CGAN的估计误差在增大,在基站天线数量由192增加到256时估计误差增加得更为明显,而本文所提出的RSENet-CGAN随着基站侧天线数量增加仍然能保持稳定的估计精度。基站侧天线数量的增加意味着信道矩阵的规模增大,变得更加复杂,因此网络模型的学习难度增加,估计精度下降。而在RSENet-CGAN中,网络引入了残差通道注意力模块来去除噪声,降低了噪声干扰对于模型的影响,同时在生成器中采用U-Net结构提高了信道矩阵二维图像的分辨率,保证了网络模型较强的泛化能力。
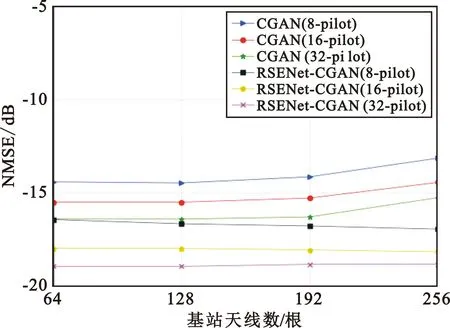
图8 SNR=0 dB时基站天线对网络模型的NMSE的影响Fig.8 Impact of base station antenna on the NMSE ofnetwork model when SNR=0 dB
图9比较了OMP、CNN、DnCNN、CGAN与本文的RSENet-CGAN在不同SNR下的NMSE,SNR的范围设置在-10~30 dB,其中OMP为压缩感知算法,其他的均为深度学习算法。从图9中可以看出,OMP算法受噪声的影响较大,在低信噪比下NMSE较差。RSENet-CGAN由于引入了残差SENet注意力模块,降低了噪声对于网络模型的干扰,在不同的信噪比下都表现优异,相较于CGAN网络模型估计精度平均提高约了2.2 dB。

图9 不同信道估计方法下的NMSEFig.9 NMSE under different channel estimation methods
3.3 运行时间
表2列举了在线估计阶段不同方法完成信道估计所耗费的时间,所得的结果为200次线上测试时间的平均值,通过运行时间的快慢可以反映出算法在实际环境中的实用性。

表2 运行时间比较Tab.2 Run time comparison
由表2可以看出,CNN与DnCNN的计算时间较低,这是因为CNN与DnCNN简单的体系结构和较少的网络层。RSENet-CGAN的计算时间要略高于CGAN,这是因为RSENet-CGAN在CGAN基础上添加了网络模块,然而最终的耗时在实时通信系统的实施传输中是可以接受的。
4 结 论
本文针对传统深度学习的信道估计方法受噪声干扰导致估计精度低、适用性差的问题,提出了一种基于RSENet-CGAN网络模型的信道估计方法,该模型从低分辨率的接收信号中恢复高分辨率的原始信号。在生成器中引入SENet,通过其模型的通道注意力模块来抑制噪声特征,降低噪声干扰,同时将SENet与残差网络相结合来解决网络层数加深出现的梯度消失的问题,引入了联合损失项来提高网络的稳定性。仿真结果表明,RSENet-CGAN网络模型相较于压缩感知OMP和同类型的深度学习算法(如CNN、DnCNN、CGAN)在低SNR下具有更高的估计精度。