基于OpenCV 图像识别的农业大棚消防灭火机器人*
2024-04-26宋振南姜丽梅穆春志毕瀚聪
宋振南 ,姜丽梅 ,穆春志 ,严 冉 ,毕瀚聪 ,李 白
(山东华宇工学院,山东 德州 253034)
0 引言
随着科技的高速发展与农业智能化水平的日益提升,农业大棚出现了诸多先进的农作物生产技术。然而,新挑战也逐渐明显,其中包括因电气短路、设备过热等原因导致的农业大棚火灾[1]。大棚火灾的发生会对农作物产生重大影响,对人们生活构成威胁[2]。传统的灭火方式往往需要人力投入,反应时间长,效果有限,而且存在一定的安全隐患。
为了提升处理农业大棚火灾的效率与安全性,近年来越来越多的研究开始关注消防灭火机器人的开发[3]。然而,目前消防灭火机器人多数使用的是复杂传感器设备,价格昂贵,且面临精确识别火源与判断灭火场景难度大、自主导航能力不足等问题。
在此背景下,课题组提出了一种基于OpenCV 图像识别技术的农业大棚消防灭火机器人。OpenCV 作为一个开源计算机视觉库,具有强大的图像处理能力,优势在于实时性强、处理速度快和识别精度高[4]。结合OpenCV 的图像识别技术,消防灭火机器人可以迅速识别灭火环境并计算出最佳的灭火路径。通过使用灵活可靠的摄像头和传感器设备,机器人可以实时获取并分析农业大棚内的火灾相关信息,如火源位置、温度和烟雾浓度等。基于这些信息,机器人可以快速作出判断,确定灭火方案并自主执行灭火操作[5]。
1 国内外研究现状和发展动态
1.1 国内研究现状和发展动态
农业大棚消防灭火机器人的研究和实验在国内得到越来越多的关注。多所高校、科研机构和农业企业正在进行相关研发工作,探索如何利用机器人技术提高农业大棚火灾处理效率和安全性[6]。
研究重点包括机器人的导航、控制系统、传感器技术以及图像识别算法等关键技术领域的创新。通过自主导航和传感器监测火灾信息,机器人能够迅速定位火源位置,实现精准灭火。随着人工智能和机器人技术的不断进步,农业大棚消防灭火机器人的性能和能力也在不断提升。应用机器学习、深度学习和自主控制等技术,提高机器人的应变能力和火灾处理效率[7]。数据共享和云平台的建设将促进农业大棚消防灭火机器人的普及。通过可靠的数据管理和分析,可以实现更高效的监测和预警,减少火灾损失。
政府对农业大棚消防的重视和支持将进一步推动机器人技术在农业安全领域的应用。相应的标准和政策的制定也有助于推动行业的发展[8]。商业化进程逐渐加快,越来越多的农业生产者和企业意识到农业大棚消防灭火机器人的潜力,将投资于相关技术和设备的研发和应用。
1.2 国外研究现状和发展动态
在国外,农业大棚消防灭火机器人的研究和开发已取得显著进展。一些企业和研究机构已经推出了商用的农业大棚消防灭火机器人,并将其应用于实际生产中。随着农业大棚消防灭火机器人需求的增加,产业链也在逐渐形成,涉及硬件制造、软件开发、数据分析、系统集成等环节的企业开始崛起[9]。
除了农业安全,农业大棚消防灭火机器人还可以帮助提高生产效率和节约人力成本。因此,在一些发达国家,还出现了将机器人与自动化农业生产相结合的趋势。
2 整体设计
农业大棚消防灭火机器人系统设计如图1所示。
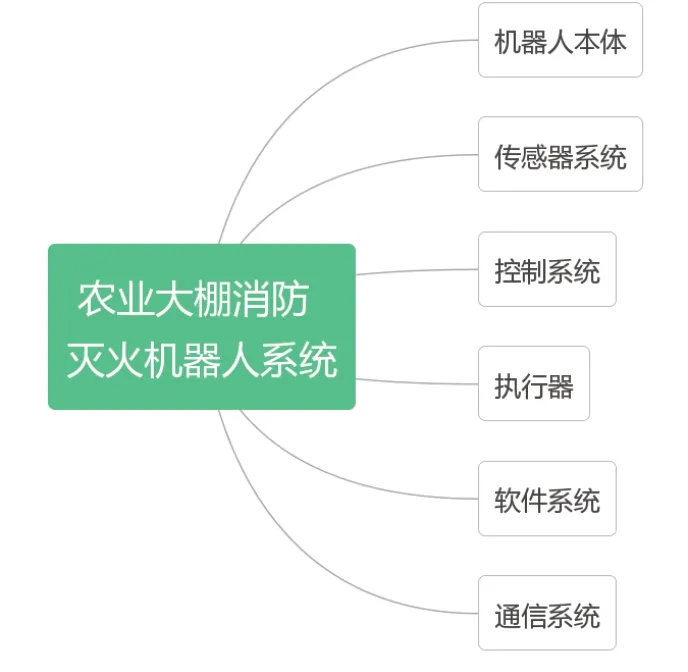
图1 系统设计
1)机器人本体设计:需要考虑机器人的尺寸、重量、形态和材质等因素,以满足不同的操作场景和任务需求。
2)机器人硬件设计:包括机器人的动力系统、传感器系统、执行器等硬件部分的设计和选择。动力系统可以采用电池或太阳能等便携式动力系统。传感器系统主要用于监测环境温度、湿度、氧气浓度等参数以及火灾的状态。执行器主要用于开启或关闭喷水管道、喷嘴等,实现机器人灭火操作。
3)控制系统设计:这是农业大棚消防灭火机器人的核心,控制系统需要能根据传感器获取的参数自主判断环境中是否存在火灾,并根据判断结果控制机器人的移动和操作。控制系统可以采用在机器人上嵌入小型控制器的方式,控制机器人的移动、喷水时间、喷水量等。
4)软件开发:包括通过机器学习等方法训练灭火行为和相应的算法,开发控制机器人执行灭火操作的软件。软件可以部署在机器人上,以实时应对环境中出现的火灾。农业大棚消防灭火机器人的软件还需要与云端数据中心等系统协同,共享数据并保持实时联网。
3 系统总体需求
3.1 火灾检测需求
1)系统需要能够准确快速地检测大棚内部的火灾情况,包括火焰、烟雾和温度等指标。
2)系统需要具备良好的环境适应性,能够在各种光照、温度和湿度条件下进行可靠的火灾检测。
3.2 精准目标定位需求
1)系统需要能够准确定位火灾的位置,以便机器人能够快速到达并执行灭火任务。
2)系统需要具备较高的定位精度,避免误差引导机器人到错误的位置。
3.3 高效灭火操作需求
1)系统需要能够准确快速地检测大棚内部的火灾情况,包括火焰、烟雾和温度等指标。
2)系统需要具备良好的环境适应性,能够在各种光照、温度和湿度条件下进行可靠的火灾检测。
3.4 图像检测需求
1)火焰检测:机器人需要能够准确地检测农业大棚内可能存在的火焰。通过图像检测,识别出火焰的位置和大小,以便及时采取灭火措施。
2)烟雾检测:烟雾是火灾的早期指示之一,因此机器人需要能够识别并准确检测大棚内的烟雾。通过图像检测技术,确定烟雾的分布情况和密度,以便评估火灾的严重程度并采取相应的措施。及早发现和处理烟雾有助于防止火灾进一步蔓延,保护大棚内的作物和设施安全。
3.5 自主导航和避障需求
1)系统需要具备自主导航能力,能够在复杂的农业大棚环境中进行路径规划和障碍物避让,确保机器人安全到达火灾区域。
2)系统需要配备合适的传感器和算法,能够实现环境感知和障碍物检测,保证机器人在导航过程中的安全性和可靠性。
3.6 远程监控和数据共享需求
1)系统需要具备远程监控能力,允许操作人员通过网络或移动设备对机器人进行实时监控和控制。
2)系统需要支持与云端数据平台和其他设备的数据共享,以便进行数据分析和决策。
3.7 可靠性和稳定性需求
1)系统需要具备高可靠性和稳定性,确保在各种工作环境和条件下正常运行。2)系统需要具备一定的自我诊断和故障恢复能力,能够及时发现并处理可能出现的故障和问题。
4 硬件设计以及算法
4.1 摄像头模块
使用高分辨率摄像头,配备适当的镜头,以便清晰采集大棚内部的图像数据,用于火灾检测和目标识别。其中,火灾检测算法是通过分析摄像头采集的图像数据,结合烟雾传感器和温度传感器的数据,进行火灾检测和识别,准确判断是否存在火灾。目标识别算法是利用图像处理和机器学习算法,分析摄像头采集的图像数据,识别火灾目标和火势变化的关键特征,并判断目标位置和尺寸信息[10]。检测算法效果如图2 所示,检测算法收敛如图3 所示。目标检测算法如下:


图2 检测算法效果
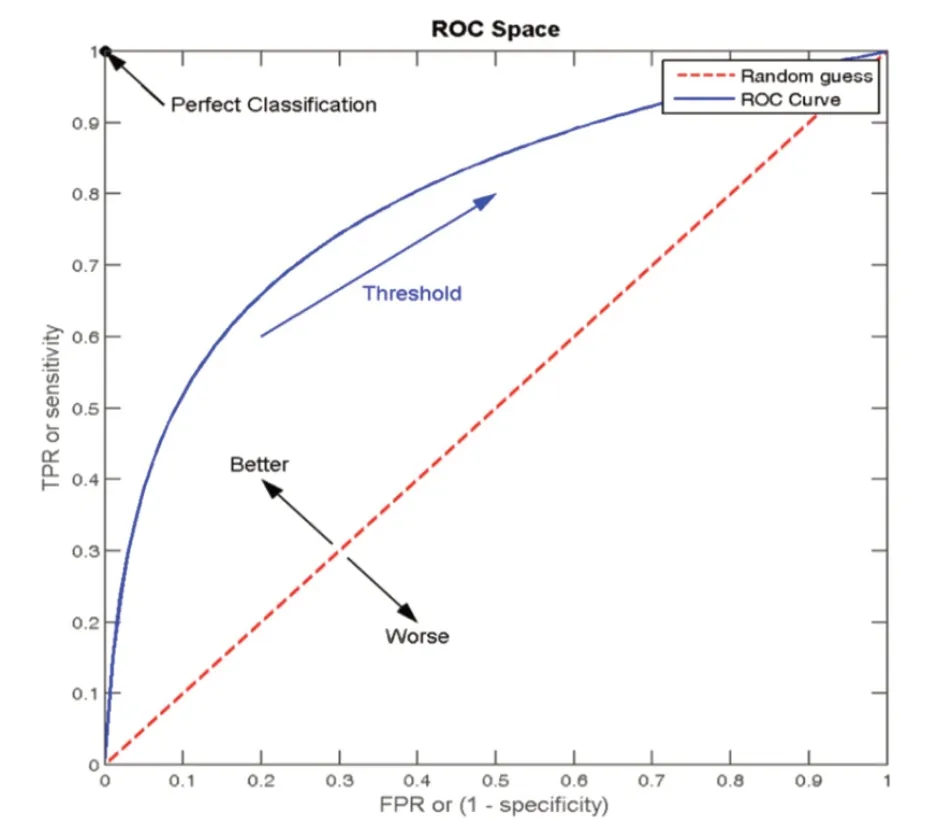
图3 检测算法收敛
4.2 传感器模块
1)烟雾传感器:用于检测大棚内部的烟雾浓度变化,一旦火灾爆发,可及时发出警报信号。2)温度传感器:用于监测大棚内部的温度变化,根据设定的阈值判断是否存在火灾,并辅助确定火灾的规模。
4.3 导航和定位模块
用GPS、惯性导航单元(IMU)等技术,实现机器人的自主导航和准确定位功能,确保机器人能够精确到达火灾现场。结合导航和定位系统提供的信息,设计算法确定机器人到达火灾现场的最短路径和避开障碍物的策略。
4.4 喷水装置
具备可调节水流、喷射角度和喷射距离的喷水装置,用于执行灭火操作。根据火灾的规模、位置、火势变化以及环境条件,结合喷水装置的能力和机器人的运动特性,制定最佳的灭火策略,包括喷水量、喷射角度和喷射距离等参数调整。
通过将硬件设计和算法融合在一起,农业大棚消防灭火机器人能够准确检测火灾、自主导航到达现场,并配备喷水装置执行灭火操作。这样能够提高火灾的检测和识别的准确性,同时增强机器人的灭火能力和适应性,确保在紧急情况下能够迅速、有效地进行灭火救援。整体实物如图4所示。
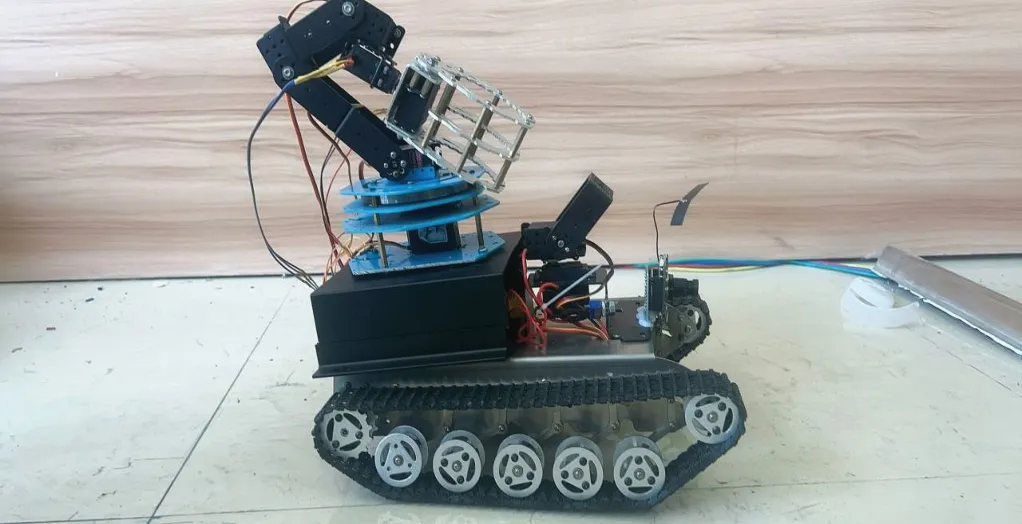
图4 整体实物
5 软件设计
5.1 用户界面设计
用户界面应该易于使用且直观。它应该包括一个主界面,显示系统的各个功能和选项,并提供实时视频监视窗口。最好的用户界面应该是可定制的,可以根据用户的具体需求进行自定义。此外,用户界面应该考虑到易于导航、易于查看、易于理解的虚拟按钮等方面的设计。
5.2 火灾监测模块设计
火灾监测模块是整个系统的关键部分。它必须处理视频流,对图像进行预处理和分析。对于预处理功能来说,它通常需要对图像进行去噪、缩放、裁剪等操作,以使图像更容易分析。一旦图像被预处理,就可被送入算法模型进行火灾检测。对于算法模型来说,它可以是基于机器学习、深度学习等技术所实现的。
5.3 报警和通知设计
火灾检测系统需要能及时向用户发出警报。系统可以通过蜂鸣器、电子邮件、短信等方式通知用户,但必须确保这种通知机制已经正确设置。通知机制需要定期测试,以确保在火灾发生时能够准确通知用户。
5.4 数据存储和分析设计
对于大多数火灾检测系统来说,数据存储是至关重要的。相关数据,如整个视频流、火灾检测结果和其他相关的控制数据等,必须存储在可靠的数据库中。此外,数据应该是结构化、组织性和可扩展性的,以支持数据分析和查询。同时,数据分析是必不可少的,它可以帮助用户理解火灾的发生频率、时间和地点等相关信息,并为用户提供指导、预防和应对的有用信息[11]。
5.5 系统安全性和可扩展性设计
安全性和可扩展性是构建火灾检测系统的两个主要考虑因素。关于安全性,必须确保系统的安全设置,如访问控制、信任边界、防火墙等,都得到了妥善的实现。另一方面,系统的可扩展性,如添加其他监测摄像头、传感器等,也必须考虑到,以确保系统在日后的扩展和升级中具有良好的灵活性。
6 结论
系统软件设计对于火灾检测系统至关重要。通过设计直观易用的用户界面,用户可以方便地与系统进行交互,并实时监视火灾情况。火灾监测模块的设计需要充分考虑图像预处理和火灾检测算法的优化,以提高检测准确度和性能效率。报警和通知功能的设计能够及时向用户发送警报,以便他们可以采取行动应对火灾。数据存储和分析模块的设计将数据保存在可靠的数据库中,并提供数据分析功能,以提供关于火灾发生频率和位置的洞察,帮助用户制定相应的防火措施。系统安全性和可扩展性的设计能够确保系统的安全性和灵活性,以适应不同规模和需求的环境。综上所述,系统软件设计的优秀实施将增强火灾检测系统的功能和性能,提供更可靠的安全保障。
