基于3S 架构的智能农机集成控制工程研究
2024-04-26贾思秀
贾思秀
(中南林业科技大学,湖南 长沙 410004)
0 引言
科学技术的发展推动了农业生产的智能化和自动化进程,也促使机械电子工程向智能化和自动化方向发展,从而提高了对控制技术的需求和要求。控制工程与机械电子工程之间存在着互补性的关系。二者的发展不仅可以加速机械电子工程的进步,也可以为其提供更多的可能性和发展方向。因此,本文对智能农业机械集成系统的实现进行了研究,重点探讨了3S 集成框架、WebGIS 等相关技术在智能农业机械中的应用方法,以3S 技术为核心,以构建基于WebGIS架构的农业机械服务管理集成平台为目标。同时,针对计算机领域新提出的物联网、云计算、B2C 电子商务模式等概念,分析了如何将其应用于智能农业机械并融入到3S 技术框架中,以便更好地发挥其自身优势,建立一系列技术框架模型,并快速开发出稳定高效的智能农业机械集成系统。
机械工程在农业机械集成中的创新应用是当前的研究热点之一,而未来计算机视觉技术将与深度学习技术等智能技术相结合,基于大规模数据集在农业生产管理各个环节中的应用,更广泛地解决农业生产管理的各种问题[1-2]。这样可以解决当前的农业难题,更好地提升农业自动化系统的经济性、普适性和鲁棒性,从而促使农业自动化设备和系统向更智能的方向发展[3]。然而,由于数据来源不足,上述研究仅停留在理论层面,缺乏实践意义。本文在参考大量文献的基础上,对物联网、云计算、B2C 模式和3S(GPS、RS、GIS 技术)集成技术进行了研究和分析,并将这些技术整合在一起,从而找到了一个适合智能农业机械集成系统的基本框架模型。基于3S 技术和系统的软件需求,完成了系统结构体系、功能模块、性能指标、工作流程和数据库的设计[4]。同时,选定了系统结构体系、功能模块、性能指标、工作流程和数据库,并运用相关的软件开发技术进行了研发工作。
1 农机一体化智能机电系统
1.1 总体系统设计
本文从智能农业机械集成系统的数据需求出发,将系统涉及的数据分为两类,分别在智能农业机械集成平台上进行数据共享和服务[5-7]。业务数据包括农业机械服务组织、内部数据、作业数据三个方面,涵盖了基本地理数据、农业机械的遥感影像、订单以及不同用户的相关信息数据,可为业务系统提供数据支持;资源数据包括与数据备份、资源管理和维护、用户角色权限等有关的信息,可为业务应用提供数据支持。智能农业综合管理系统建立在网络基础上,因此采用了浏览器/服务器架构(Browser/Server, B/S)的开发方式;J2EE 采用了三层结构,分别是表现层、中间层和数据服务层。为了保证系统的通用性、高效率、可移植性和安全性,本文选择了Java 平台作为系统开发和部署的平台;软件系统开发使用了Java 语言和WebGIS 相关技术,并在研发过程中引入了物联网、云计算和B2C 电子商务模式等技术。将3S 技术用于数据采集、管理、计算、分析和展示,形成了智能农业机械集成系统。基于B/S 设计模式和J2EE 三层架构的原则,结合系统的实际功能需求,将系统划分为用户层、应用层和数据层三个层次,集成系统结构如图1所示。
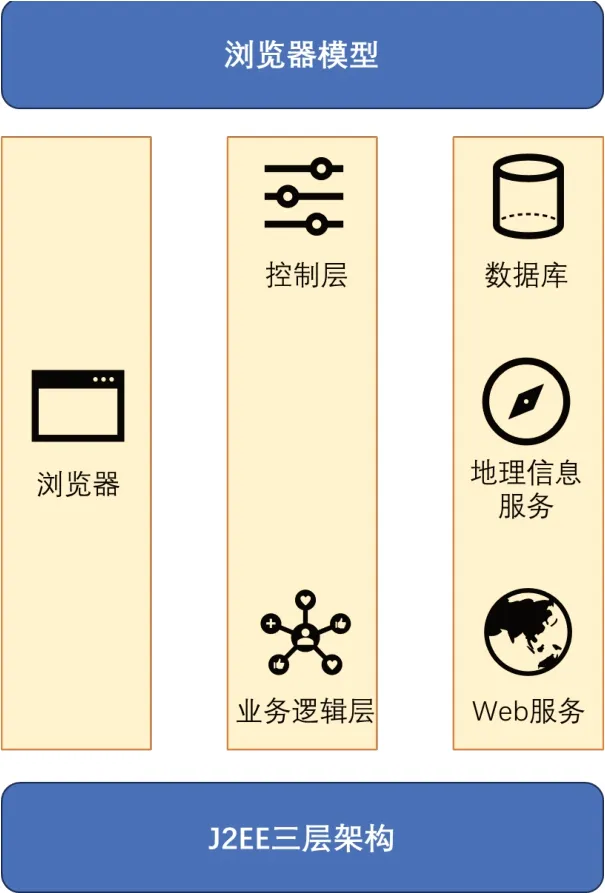
图1 集成系统结构
从图1 可以看出,用户层是系统与用户交互的界面,系统的各种功能页面可以在不同的浏览器中展示。本文采用了JQuery 框架和Ajax 技术来开发网页交互功能。借助OpenLayers 技术,实现了WebGIS 的各种地图功能。用户可以通过浏览器中的HTTP(超文本传输协议)请求,使用互联网的传输协议,向应用层发送请求指令。系统处理这些请求后,返回所需的数据结果,完成用户的操作功能。
OpenLayers 是一个用于开发WebGIS 客户端的JavaScript 库,其部署在Web 服务器上的应用层主要由控制层和业务逻辑层组成。其中,控制层由Struts框架管理,确保了用户界面与业务逻辑层之间的有效交互。Spring 框架的引入则进一步拓展了其在应用层的作用,使得它不仅仅局限于业务逻辑的实现,还能够通过与Struts 的整合,利用Java 代码访问位于数据层的服务。这样的结合优化了数据的访问和处理流程,提高了系统的效率和响应速度。最终,应用层能够根据用户的请求指令,有效地查找和处理数据,然后将结果返回给用户界面,使用户能够对数据进行操作和交互[8-10]。
数据层包括了GeoServer 服务器、PostgreSQL 数据库以及一些分布式的Web 服务和地图服务。应用层利用对GeoServer 服务器和PostgreSQL 数据库的访问,获取基本的地理信息数据和业务数据。应用层中的Java 功能代码可以直接调用数据中心发布的农业机械终端监测数据服务,或者使用互联网调用已发布的遥感影像和矢量地图的切片服务,并将数据反馈到应用层中的用户手中。数据层为整个系统的运行提供了充分的数据支持。
1.2 系统模块设计
智能农业机械集成系统主要面向农民、农机服务组织和政府等用户。不同用户有不同的功能需求,且不同用户之间存在一定的数据逻辑关系。因此,在设计系统模块时,应根据用户的功能需求和相互关系,设计系统的各个功能模块。智能农业机械集成系统主要包括农机作业服务系统、农机作业调度和监督管理系统、农机作业辅助决策系统三个子系统。每个子系统由不同的功能模块构成。智能农业机械集成系统的总体模块设计如图2所示。

图2 智能农机集成系统
农机作业服务系统主要包括主页、供应信息、订单管理、作业分配四个模块,为农民提供了农机服务组织检索、地图显示操作、订单管理(增删改查)、将订单分配给农机服务组织等功能。农机作业调度和监督管理系统由主页、订单管理、作业调度、作业监督、作业分析、信息管理、轨迹点管理等模块组成,使农机服务组织能够管理订单、调度作业、监控农机和操作员以及管理组织内的相关信息。农机作业辅助决策系统的主要内容包括主页上的农机动态和专题动态、作业分析、应急管理(包括临时订单和紧急事件)、作业质量监测、服务组织管理、用户管理等。政府用户可以利用这些功能来监测和管理农机服务组织、作业质量和紧急事件,帮助农民拓展订单,并对当地的农业生产和农机服务组织的各种数据进行统计和分析,为当地的农业生产、经济发展和政策制定提供数据支持。
1.3 过程设计
根据用户的主要功能需求,智能农业机械集成系统的业务流程主要包括以下几方面:需求服务、订单调度、农机作业、动态监管、统计分析、辅助决策。
1)需求服务。农民可以在这个服务网站上找到农机服务机构,并提交他们的服务需求;也可以通过电话向农机服务机构和相关政府部门提出需求,然后由农机服务机构和政府部门工作人员完成订单的填写,最后通知农民订单的处理结果。
2)订单调度。农技推广机构根据订单的要求,将所需的机械和机械人员送达指定地点,并为农民进行农技推广。
3)农机作业。农机服务机构通过手机短信通知操作员。操作员根据订单的要求驾驶农机到达作业现场,进行农业作业,并及时将作业任务和状态信息传输到系统。
4)动态监管。通过农机移动终端传输的数据,控制农机的运行轨迹和状态,实时定位农机和操作员。同时,可以回放农机的运行轨迹点,估算作业面积。
5)统计分析。根据农机、操作员和作业时间的情况,农机服务机构对作业面积、作物类型和作业类型进行统计和分析。
6)辅助决策。政府对农机服务机构、农机数量、农机作业面积、作物类型、作业质量、作业时间等信息进行实时了解,为制定各种农业生产计划和扶持补贴政策提供科学、全面、直接的数据支持。
1.4 数据库设计
智能农业机械集成系统中使用的Web 地图主要调用了天地图发布的WMTS 地图切片服务和遥感影像切片服务。遥感影像主要用于农机作业辅助决策系统下的作业质量分析模块。系统调用了GeoServer发布的WMTS 遥感影像切片服务,该服务提供了田间区域、作物类型、作物产量、作物成熟度、收获范围等方面的实时可靠的监测数据,保证了政府部门统计分析和科学决策工作的顺利开展。其他空间数据、系统业务数据和资源数据都存储在本地PostgreSQL数据库中。系统通过服务请求实时从数据中心获取农机移动终端上传的数据,并将数据保存在本地数据库中,供智能农机集成系统快速使用。智能农机集成系统由三个子系统构成,每个子系统既独立又相互关联,由数据库中的数据组合而成,彼此隔离,互不干扰,但有些数据(如空间数据)是共享的。通过数据表中的ID 标识和分组来确定数据的归属。在设计数据库时,所有数据表和字段都要根据数据、结构、逻辑关系和特定规则设计,确保不同类型和权限的用户能够正确使用。数据之间没有冲突,以避免系统错误。用户信息和空间信息如表1所示。
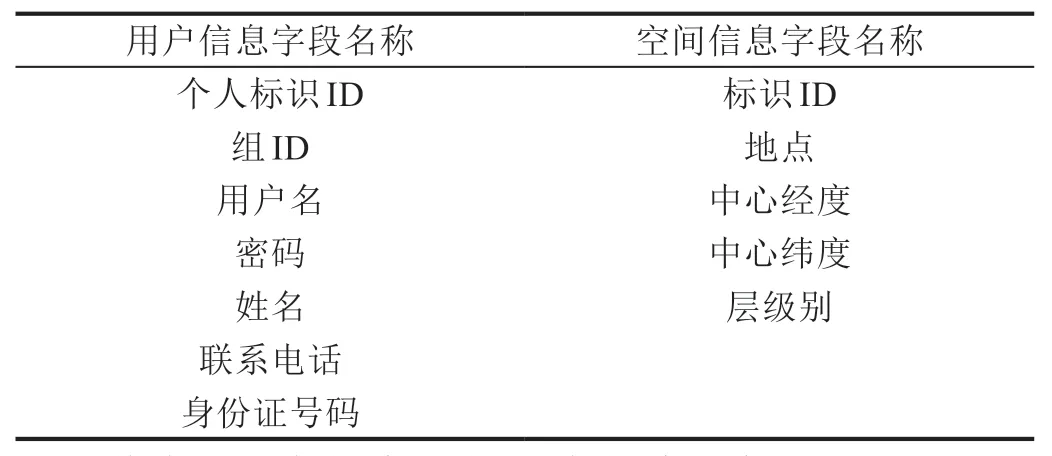
表1 用户信息和空间信息
其中,用户信息包括用户的个人标识ID 和组ID以及用户名、密码、姓名、联系电话、身份证号码等基本注册信息。空间信息包括国家的基本地理信息,并存储了省、市、县、乡、村等各级行政区划的地名、中心点坐标、层级、空间维度等空间信息数据,为电子地图的显示提供了充分的地理信息。
1.5 系统数据平台服务
在智能农业机械大数据系统中,基于对农机分布数据、农机作业数据和农机购买数据等历史数据的分析,对各地区的农机发展情况进行了研究。农机发展情况的分析包括六个方面,即农机拥有量分析、农机新增量分析、农机进口比例分析、农机品牌排名、农机补贴数据分析和农机维修数据分析。将年均增长率引入到农机拥有量的研究中,可以更好地反映农机的发展状况。同比增长率是指本期与上期相比所实现的相对增长率,其公式为:
其中,v表示同比增长率,l表示本期水平,u表示上期水平。
本文对农机拥有量的分析采用了这一指标,例如通过将某一年与前一年同期进行比较计算的增长率。环比增长率是以当前数据为报告期,以前一数据为基期。报告期与基期之间的比较就是环比增长率。农机数量的变化用同比增长率和环比增长率来表示,公式为:
2 智能农机集成系统测试
网络环境对系统的响应速度有重要影响。本文的响应速度实验旨在检测系统中并发请求越来越多时,系统相应的响应时间的变化情况。响应时间的计算是指客户端发出请求后,到达服务器并经过一系列交互(如读取请求文件、查询相关数据库信息等),再从服务器返回客户端并完成响应所花费的时间。在一些测试工具中,响应时间也称为TTLB,响应时间统计如图3所示。

图3 响应时间统计
由图3 可知,随着并发量的增加,响应时间也增加。当并发量为100 时,平均响应时间为228 ms,最大响应时间为713 ms,最小响应时间为181 ms。当并发量为1 000 时,平均响应时间为803 ms,最大响应时间为1 284 ms,最小响应时间为521 ms。
3 结论
农业机械化是衡量农业现代化的一个重要指标。在这一过程中,应该充分利用现代计算机技术,构建一套适应互联网时代的农机服务管理集成系统。这有助于提升中国农机信息化水平,加强政府部门对农业机械化的宏观调控,推动农业机械化和信息化的协同发展。近年来,信息技术在农业生产中的应用日益广泛,农机服务管理的数字化是农业信息化发展的一个代表性案例。建立新型的农机服务管理模式可以帮助农机服务组织在农忙季节及时调度订单,管理旗下的所有农机和操作员,并迅速为农民提供农机服务。这完全改变了传统的农机服务管理方式,使得农机作业服务实现了智能化和信息化。此外,可以建立一套与经济制度相适应的农机信息化服务管理系统,这也是一种将农业生产与信息技术相结合的重要途径。
