电力隧道巡检机器人关键技术研究
2024-04-25尚英强邰宝宇
赵 洋 郭 甜 尚英强 邰宝宇 刘 青
(国网北京电缆公司,北京 100022)
0 引言
电缆隧道是指用于容纳大量电缆的走廊或隧道式构建物,可对电缆进行充分的保护[1]。经过城市多年的发展,地下电缆隧道已成为复杂交错的网络,许多电缆隧道面临着坍塌、积水、有毒气体蔓延、设备老化、支架锈蚀等问题[2],为确保隧道内电缆的安全运行和设备的稳定运转,维持整个电网的持续运行,对电力隧道的定期巡检必不可少。可由于各种问题的复杂多样,人工巡检的难度极大,巡检人员的安全得不到充分保障。而电力隧道巡检机器人的出现,弥补了传统人工巡检的缺陷,避免了多种事故的发生。
电力隧道检测机器人的发展起源于21世纪初,华盛顿大学研制了一款用于隧道检测的机器人[3-4]。我国虽然起步较晚,但电力隧道机器人检测技术也在飞速发展[5]。而随着现代科技的持续推进,机器人技术、传感器技术、互联网建设和智能控制技术得到了迅速发展,电力隧道检测机器人将适用于更为复杂的环境,实现更多的功能。
国内外对电力隧道巡检机器人的研究已趋于成熟,各项运行要求也基本实现,本文围绕机器人导航和定位技术、环境感知技术、机器人运动控制技术、电力供应和能源管理技术、操作控制和通信技术、安全保护和故障处理技术等六个方面对现有电力隧道巡检机器人的技术研究和应用状况进行了综述与分析,以便全面理解电力隧道巡检机器人的运行规则。
1 机器人导航和定位技术
对于电力隧道检测机器人而言,导航和定位是非常关键的问题,在运行过程中,电力隧道检测机器人很容易受到外部环境、噪声和其他因素影响,不可能完全准确地实施命令,其具体位置与理论位置会存在偏差,需要对电力隧道检测机器人定位位置进行修正,以确保信息的准确。同时,扫描成像、路径规划等功能的实现也离不开电力隧道检测机器人的具体位置。因此,导航和定位、对偏差的修正技术决定了电力隧道检测机器人的定位精度,能支持电力隧道检测机器人的功能实现。
电力隧道检测机器人的定位方法主要有两类:直接定位和间接定位[6]。直接定位是指通过外部的定位手段如GPS、信标等对电力隧道检测机器人进行定位,不需要机器人本身装载定位设备,定位难度较小,运行效率偏高,但这种定位方式对环境和设备有较高要求,现有的电力隧道环境十分复杂恶劣,直接定位难度极大。间接定位是指通过电力隧道检测机器人本身装载的各类传感器进行定位,如惯导定位、里程计定位等,这种定位方式设计难度较大,运行系统较复杂,为了确保定位的精确性,还需要使用相应的算法以减小定位的误差,但这种定位手段对外部环境没有要求,定位精度高,是最主流的定位方法。
目前,实现电力隧道检测机器人的准确导航与定位,需要采用光学方法的三维成像技术保证形状测量的一致和现场事物的准确,其中TOF三维成像、扫描三维成像、结构光投影三维成像和立体视觉三维成像这四种技术较为成熟[7],四种技术对比如图1所示。
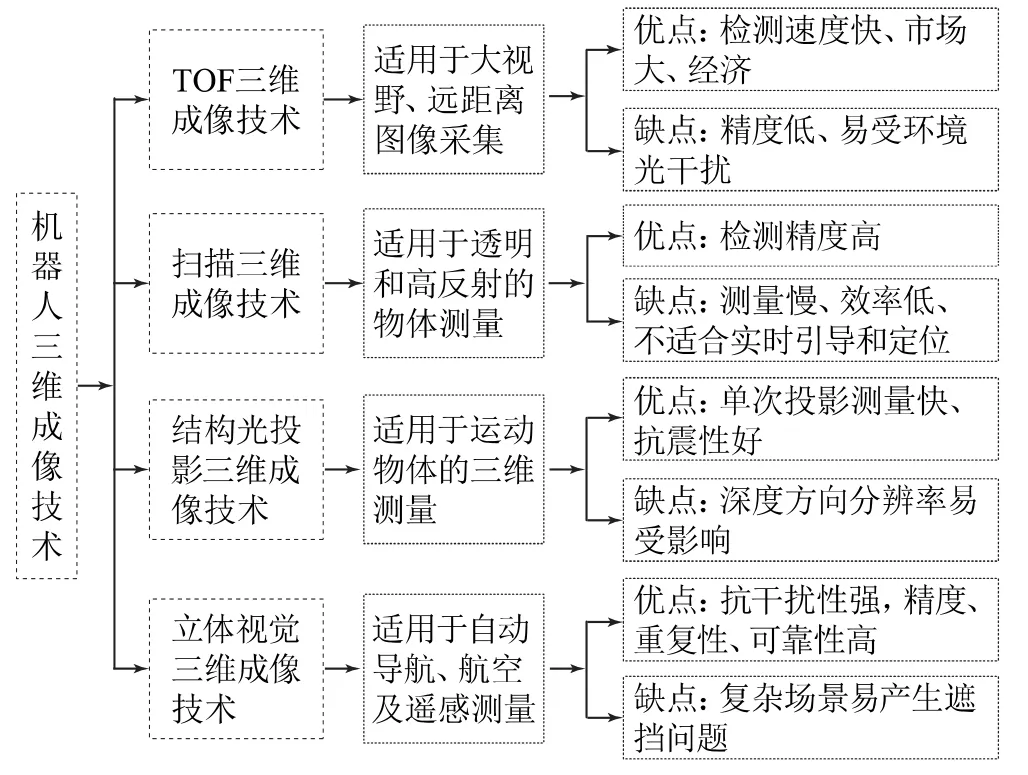
图1 四种三维视觉成像技术比较
2 环境感知技术
电力隧道检测机器人在隧道中自主运行的前提是确定其周围环境的可行驶区和不可行驶区,确定自身与周边环境的相对位置关系与姿态,对环境进行感知。由此可见,环境感知技术是电力隧道检测机器人自主运行的前提。
目前,电力隧道检测机器人环境感知技术主要有两类:视觉巡线和激光SLAM[8]。视觉巡线技术是通过基尔霍夫变换,提取机器人轨道信息,进而拟合出周围环境的可行驶区。这类环境感知技术成本低,实现效果好,但在光线较暗、轨道被积水覆盖而出现反光等异常情况下,机器人轨道信息无法被完整准确地提取出来,可能会导致系统失灵。而激光SLAM(Simultaneous Localization and Mapping)技术对环境的识别不依赖于可见光,它是通过激光雷达和点云提取周围环境的准确可靠信息,测距精度高,测量距离远,在与IMU、里程计等传感器融合后能够实现对环境的可靠感知,可用于感知隧道内部环境,监测障碍物和测量距离等参数,虽成本较高,但却是现有的一种可靠环境感知技术。激光SLAM技术示意图如图2所示。

图2 激光SLAM技术示意图
3 机器人运动控制技术
现有的电力隧道检测机器人主要分为轮式、履带式、腿式、蛇形式、跳跃式、复合式和导轨式,每类机器人都存在不足,不能用任意一种电力隧道检测机器人去适用国内所有隧道的巡检任务,要借鉴国内外机器人移动机构的成功经验,完善机器人运动控制技术,通过高效的路径规划和运动控制算法,实现巡检机器人能在狭窄和复杂的隧道环境中移动和转向,使其具备适应各种地形的移动能力,包括攀爬、爬行、爬坡和通过狭窄通道的能力。电力隧道检测机器人的机械系统主要由巡检移动机构及其所搭载的装置组成,涉及的原理方案设计包括移动方式、驱动方式、转向方式三个部分[9],通过对移动机构、驱动系统、轮子结构的设计实现对电力隧道检测机器人的运动控制。
4 电力供应和能源管理技术
随着电力隧道检测机器人的不断发展,其高效经济的电力供应和能源管理成为被广泛研究的对象,以保证并延长巡检机器人的工作时间和续航能力。其主要的充电形式有两种:有线接触式充电方式和无线非接触式充电方式[10]。
有线接触式充电方式是利用导线或金属作为传输能量的媒介,实现对机器人的充电。这种充电方式效率较高,一般在95%以上,而且操作简单,经济实惠,便于推广,是现有的常用、主流的充电方法。但导线或金属裸露在隧道中,极易受到外部环境的影响,容易发生线路锈蚀和放电现象,安全性方面不能充分保障。
无线非接触式充电方式几乎克服了有线接触式充电方式的所有缺陷,安全系数高、设备损耗低,传输更灵活。无线非接触式充电技术主要有三种:以电磁感应原理进行无线充电、以磁耦合谐振原理进行无线充电和以电磁辐射原理进行无线充电。三种充电形式的对比如表1所示。
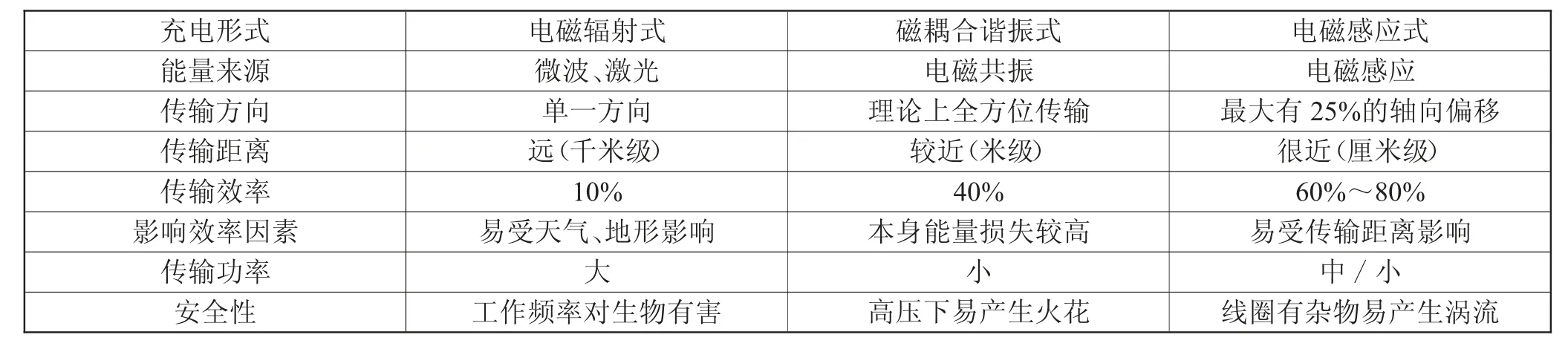
表1 三种无线非接触式充电形式的对比
5 操作控制和通信技术
电力隧道检测机器人操作控制和通信技术由终端操作部分、通信部分、机器人本体部分三部分构成,其主体部分如图3所示。
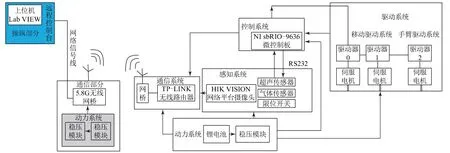
图3 机器人操作控制和通信技术系统主体部分
由图3可知,操作员可通过操作上位机发出遥控命令,根据采集回来的画面以及通信系统发送的信号实时控制机器人运动,实现巡检机器人在狭窄和复杂的隧道环境中移动和转向,可以进行攀爬、爬行、爬坡,可以通过狭窄通道,并能实现图像采集与拍照定位[11]。此系统能使操作员远程操控巡检机器人并接收实时数据反馈,能够在隧道环境中保持良好的信号传输。
6 安全保护和故障处理技术
隧道环境的多样性决定了巡检机器人在投入前要进行大量的试验,机器人本身要进行安全保护测试,包括碰撞检测、自动停止、全向移动等,以确保巡检机器人和操作人员的安全。而当隧道内发生故障时,机器人也能通过状态终端和监控终端及时捕捉故障信息,并采取相应的修复措施[12]。机器人本体状态与隧道状态检测系统如图4所示。
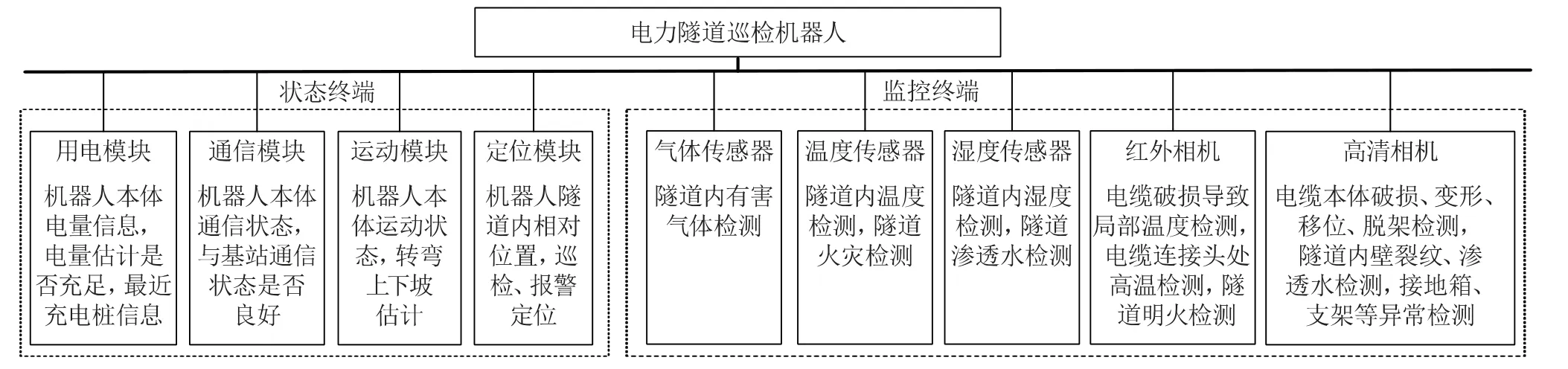
图4 机器人本体状态与隧道状态检测系统
7 结束语
随着机器人技术、传感器技术、互联网建设和智能控制技术的不断发展,电力隧道巡检机器人将越来越成熟,可在复杂多变的环境中实现更多的功能,大大提高检测效率,降低人员劳动强度,保障巡检人员的安全,从而有效保障电力线路和设备的安全可靠运行。