基于仿生水母的水下机器人结构设计与试验研究*
2024-04-24张冬冬江一行范云杰
张冬冬,江一行,范云杰,孙 垒
(浙江机电职业技术学院 智能制造学院,浙江 杭州 310053)
0 引 言
作为水下工作的极限作业机器人,水下机器人凭借其机动性好、自动化程度高等优势,可代替人们完成水下探测、水下管道检修等具有一定危险的水下工作。
随着仿生技术的发展,近年来基于各类水下生物的仿生机器人研究逐渐深入,如仿生鱼、仿生乌贼等。而水母因为其特有的喷射推进运动方式,与其他躯体波状游动或胸鳍拍动推进的方式相比,具有噪音小、隐蔽性好、能耗低等优点,其仿生研究工作逐渐得到关注[1],国内外研究人员在仿生水母机器人研究工作上已取得一定的成果。
美国弗吉尼亚理工学院BRESSERS S等人[2]研发了一款名为“JetSum”的仿生水母机器人,通过形状记忆合金(shape memory alloys,SMA)薄片的通电加热后弯曲及恢复来模拟伞状体的运动,实现水母机器人的喷射推进目的;但这种驱动方式容易受到水温等环境因素的影响。闫兴坤[3]通过对水母的运动机理和形态研究,设计出了一种仿生水母机器人,以伞状体为主要仿生对象,采用串联机构进行了机械臂设计,并对其进行了仿真分析和控制算法研究;但其结构较为复杂,且缺乏对转向机构的设计。王琦等人[4]为了解决较小尺寸机器人实现高效轨迹控制的难题,设计并研制了一种微型仿水母机器人,通过重心调整机构和仿水母推进器的协同控制,有效实现了水下轨迹可控目的,并通过实验进行了验证;但该研究对水母生物本身的仿生设计不足,且动作原理与水母生物存在一定的差别。谭俊哲等人[5]根据水母喷射推进的方式,设计了一种以SMA弹簧作为驱动材料的仿生水母机器人,并采用数值模拟的方式研究了不同工作状态下水母机器人的运动阻力特性;但该运动容易受到环境温度的影响,且方案缺乏转向系统设计。
上述研究内容主要是集中于水母生物某单一结构的仿生或运动特性的研究,其整体仿生效果不佳,且机械结构较为复杂。部分学者采用SMA驱动方式,虽然简化了结构,但其驱动效果容易受到水温等因素的影响,增加了水母机器人的运动不确定性。
针对上述问题,笔者基于对水母生物特性的研究,采用特征提取和功能耦合的方式,设计一种仿生水母机器人,运用矢量法对其关键推进机构进行运动学解析,并对实际设计案例进行刚柔耦合分析和模态分析,基于设计和分析结果进行实物样机的制作与调试。
1 水母机器人仿生设计
1.1 生物特征介绍及运动功能分析
水母是海洋中一种古老的无脊椎动物,其身体结构与普通鱼类不同,不仅没有骨骼,且其含水量可达95%以上。
某类水母生物运动功能部位如图1所示。

图1 水母运动功能部位
水母的身体就像一把展开的伞,普通水母的伞状体通常可以长到200 mm以上,伞状体下面有一些须状的条带,也就是水母的触手。
相比于躯体波状游动或胸鳍拍动推进的大部分鱼类身体结构,水母独特的身体构造也决定了其具有与众不同的运动方式。伞状体是水母游弋的主要动力来源,水母采用收缩伞状体挤压内腔的方式,改变其内腔体积,喷出腔内的水,通过喷水推进的方式进行移动。
水母借助触手可以有效地改变运动方向,水母在水中需要换向时,就会把触手弯曲,通过触手的弯曲使得前进时水流发生变化,最终达到换向的目的。
1.2 特征提取及功能耦合
有赖于简单的运动方式,水母具有简洁的外形。笔者采用特征提取、规则化等方法,对水母生物的外部造型特征及结构特征进行提取与总结。
为了使生物的结构优势在仿生设计中得到较准确的表达,笔者将水母运动功能部位结构特征与仿生水母机器人主要功能进行耦合设计[6-7]。
确定仿生水母机器人的主要功能包括:
1)游动前进。仿生水母通过仿伞状体喷射水流方式来提供动力,实现机器人的游动;
2)转向调整。仿生水母通过以仿触手伸展方向及角度调节来控制水流产生的分力,配合伞状体的主动力,最终逐渐完成转向动作;
3)上浮下潜。仿生水母通过浮力调节以及伞状体的拍打速度调整机器人的上浮与下潜状态。
1.3 方案设计
根据仿生水母机器人的功能要求进行方案设计,获得整体机构原理如图2所示。
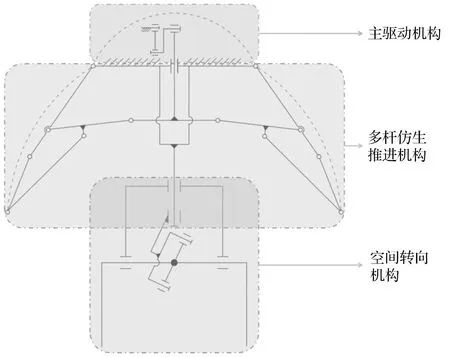
图2 仿生水母机器人机构原理图
仿生水母机器人机械系统由三大机构组成,分别为主驱动机构、多杆仿生推进机构和空间转向机构。其中,主驱动机构为多杆仿生推进机构提供动力,是仿生水母机器人游动的主要动力;多杆仿生推进机构安装在水母机器人的中部(模拟真实水母伞状体内腔),通过多杆仿生推进机构的摆动,模拟水母通过伞状体内腔的收缩与扩张,来喷射水流推进自身的动作;空间转向机构安装在仿生水母机器人的底部(模拟真实水母的触手部分),其通过方向和角度配合调节来模仿水母触须灵活的姿态,并利用触手叶片滑动水流产生分力,以达到改变水母的前进方向的目的。
笔者根据图2所示的机构原理,并结合各部分尺寸参数要求,进行虚拟样机的设计,获得了仿生水母机器人的三维结构模型,如图3所示。

图3 三维结构模型
2 多杆推进机构运动学求解
多杆推进机构是仿生水母机器人的核心机构之一,也是水母机器人模拟水母伞状体喷射腔体内水流的执行部分。因此,多杆推进机构的运动参数解析对于提高水母机器人的喷水推进效率和机器人水下运动控制具有重要意义。
根据图2所示的机构原理图,可以得到多杆推进机构的向量表示方式,如图4所示。

图4 多杆推进机构的向量表示
图4中:ri表示图中的各个向量,θi表示向量ri从正x轴逆时针测量的方向[8]。
根据闭环向量方程可得到机构的两个公式表示如下:
r1+r2+r3+r4+r5=0
(1)
r6+r7+r8-r9=0
(2)
将式(1)简化到x轴和y轴后,可以得到:
r1cosθ1+r2cosθ2+r3cosθ3+r4cosθ4+r5cosθ5=0
(3)
r1sinθ1+r2sinθ2+r3sinθ3+r4sinθ4+r5sinθ5=0
(4)
同理,将式(2)简化到x轴和y轴后,可以得到:
r6cosθ6+r7cosθ7+r8cosθ8-r9cosθ9=0
(5)
r6sinθ6+r7sinθ7+r8sinθ8-r9sinθ9=0
(6)
由图4可知:θ1=90°,θ2=0°,θ3=θ6,θ5=180°。将其代入式(3)~式(6),可以得到:
r2+r3cosθ3+r4cosθ4-r5=0
(7)
r1+r3sinθ3+r4sinθ4=0
(8)
r6cosθ3+r7cosθ7+r8cosθ8-r9cosθ9=0
(9)
r6sinθ3+r7sinθ7+r8sinθ8-r9sinθ9=0
(10)
为了消除公式中不必要的变量,将式(7)~式(10)转化为:
r2+r3cosθ3-r5=-r4cosθ4
(11)
r1+r3sinθ3=-r4sinθ4
(12)
r6cosθ3+r7cosθ7+r8cosθ8=r9cosθ9
(13)
r6sinθ3+r7sinθ7+r8sinθ8=r9sinθ9
(14)
对式(11)和式(12)的两边分别取平方后相加,根据三角函数公式sin2θ+cos2θ=1,得:
(15)
同理,由式(13)和式(14)可以得到:
(16)
式(15)和式(16)为多杆推进机构尺寸综合时的闭环方程。因此,共有10个未知数,包括8个未知常数和2个未知变量。此外,r1和θ3分别为输入变量和输出变量,它们须在尺寸综合前给出[8]。
为了获得后续研究工作的载体,笔者基于式(15)、式(16)给定了一个设计实例。
其尺寸参数如表1所示。

表1 设计案例对应各尺寸参数取值
根据实例参数取值,笔者采用SolidWorks软件建立多杆推进机构的三维模型,并获得其极限位置状态,如图5所示。

图5 多杆推进机构三维模型及其极限位置状态
3 仿真分析
3.1 刚柔耦合分析
多杆推进机构在水下工作时需要为仿生水母机器人的游动提供动力。根据作用力与反作用力原理,机构在喷射水流时会受到来自水体的反作用力,因此需要对结构的强度和刚度进行仿真分析,以确定其能够满足工作要求。
多杆推进机构的两种位置状态如图6所示。

图6 多杆推进机构的两种位置状态
机构由扩展状态转为收缩状态的过程即为喷射水流的过程。在不考虑机构运行时的速度以及加速度影响时,喷射出的水流重力则可以近似等于多杆推进机构受到的来自水体的反作用力[9]。
根据设计模型,可以测算出多杆推进机构由扩张状态转为收缩状态时喷射出的水流体积约为V排≈V扩-V缩=3.1 L-2.5 L=0.6 L,则多杆推进机构受到的反作用力约为Ft≈6 N。
在多杆推进机构的扩展和收缩过程中,其受力状况比较复杂。笔者采用刚柔耦合分析的方式,研究其在不同扩展程度下的应力和变形响应[10-13]。
由于机构呈中心对称分布结构,为了简化计算,可以对单个多杆组合进行分析,需要将简化后的模型导入ANSYS Workbench环境瞬态动力学模块,在完成材料定义、柔性体创建、网格划分、以及考虑安全系数的载荷施加等步骤后,进行刚柔耦合仿真分析,得到刚柔耦合分析结果,如图7所示。

图7 刚柔耦合分析结果
由图7(a)可知,当机构处于最大扩展状态时,其最大等效应力最大。
由图7(b)、图7(c)分析结果可知:结构在考虑安全系数后的载荷作用下,应力主要集中在多杆机构铰接处,最大等效应力约为4.92 MPa,远小于PE材料的许用强度,最大变形量约为3.89 mm,变形分布呈均匀变化的状态。
因此,多杆推进机构的结构强度和刚度能够满足仿生水母机器人水下游动时的需求。
3.2 模态分析
笔者所设计的仿生水母机器人主要针对的是海洋探测、水质监察以及军事侦察等应用场合。
由于海洋生物较为丰富,机器人在工作时容易受到其他大型海洋生物或生物群体的破坏与干扰,所以需要设置声学驱鱼装置[6]。因此,仿生水母机器人结构不仅需要满足水下工作时的强度刚度要求,还需避免驱鱼装置在工作时与机器人基体结构发生共振而影响活动部件的正常运行,这就需要对结构进行模态仿真分析。
模态是结构的固有振动特性,模态分析是动力学仿真的基础,主要用于研究结构的固有频率、模态振型等特性[14-18]。采用ANSYS Workbench等仿真软件可以完成结构的计算模态仿真分析。
模态分析的动力学基本方程表示如下:
(17)
式中:[M]为结构质量矩阵;[C]为结构阻尼矩阵;[K]为结构刚度矩阵;{F(t)}为激振力矢量函数;{μ}为位移矢量。
笔者所设计仿生水母机器人不考虑激振力和阻尼的影响,因此式(17)可简化为:
(18)
其对应的特征值方程为:
(19)
式中:ωi为第i阶模态的固有频率,i=1,2,3,…,n。
笔者对机器人结构进行简化处理,然后将其导入至AWE环境进行仿真计算,得到前12阶计算结果,如表2所示。

表2 模态频率
由于结构在自由状态下的仿真结果包含刚体模态,所以前6阶频率为0 Hz或接近于0 Hz[19]。
去除刚体模态后的7~12阶的模态振型如图8所示。

图8 去除刚体模态后前6阶模态振型
模态频率为声学驱鱼装置的选择提供了依据,模态振型为多杆推进机构满足共振频率下继续稳定工作指明了优化方向。
4 实物制作及水下调试
笔者根据仿生水母机器人设计模型进行实物样机制作与调试,即采用3D打印技术获取主要零部件,在多杆推进机构外侧包裹一层柔性透明材料以模拟水母的伞状体内腔,进行控制系统设计,并以电机驱动芯片DRV8833对有刷电机进行脉宽调制(pulse width modulation,PWM)调速,主驱动电机的调速范围为0 r/min~80 r/min。
笔者对安装好的智能控制部分所有电子元器件进行灌胶防水处理。
为实现移动终端对仿生水母机器人的远程控制,笔者设计的通讯方式如图9所示。
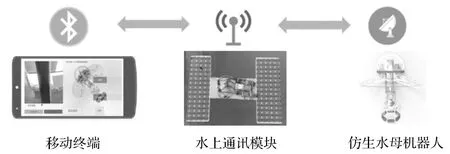
图9 通讯方式示意图
其中,水上通讯模块同时搭载了蓝牙收发装置和无线电收发装置。操作时,移动终端采用蓝牙与水上通讯模块建立连接,水上通讯模块再采用无线电与仿生水母机器人建立连接。通过三点式的通讯设计,实现了远距离移动终端控制目的,也提高了仿生水母机器人的水下无线通讯能力。
笔者通过控制系统调速设计初设主驱动电机的转速约为40 r/min。
仿生水母机器人实物及初步水下试验如图10所示。

图10 实物样机及水下调试
图10(b)所示机器人由位置①运动至位置③时大约耗时6 s,移动距离约为350 mm,表明在当前电机转速下,机器人的直线运动速度约为58.3 mm/s。
图10(c)所示为机器人在保持直线运动速度的情况下通过转向机构实现转向调节,由位置①转向到位置④时大约耗时4 s,转向角度约为90°,表明在当前电机转速下机器人的转向速度约为22.5°/s。
通过样机水下试验,初步验证了上述设计方案的可行性,即仿生水母机器人具有较好的水下运动特性,能够模拟水母生物进行水下移动、上浮、下潜和转向等动作,且结构在试验过程中未发生破坏和较大变形。
5 结束语
为了获得一种噪音小、隐蔽性好的水下探测机器人,笔者以水母生物为对象,通过生物特征提取及功能耦合,设计了一种仿生水母机器人结构;采用矢量法对其关键推进机构进行了运动学求解,并给出了实际设计案例;运用ANSYS进行了刚柔耦合分析和模态分析。
研究结果如下:
1)多杆推进机构在运动过程中最大应力约为4.92 MPa,最大变形量约为3.89 mm,结构强度和刚度能够满足工作要求,低阶频率以及去除刚体模态后的模态振型可为声学驱鱼装置的选择提供依据;
2)实物样机水下试验结果表明,仿生水母机器人具有较好的水下运动特性,能够模拟水母生物进行水下移动、上浮、下潜和转向等动作,且结构在试验过程中未发生破坏和较大变形;
3)仿生水母机器人在主驱动电机初设转速的驱动下直线运动速度约为58.3 mm/s,转向速度约为22.5 °/s。
笔者设计的仿生水母机器人后续可应用于水下探测及军事侦察等场景,这些场景对于机器人的隐蔽性、喷射推进效率、续航能力以及水下复杂环境适应性都有一定的要求。
后续工作中,笔者将基于现有的研究成果开展相关的分析与试验研究。
