基于有限状态机的绝缘子检测机器人越障控制
2024-04-22刘宁波张静鑫
刘宁波,张静鑫,舒 莹
(安徽明生恒卓科技有限公司,安徽 合肥 230093)
0 引言
电力市场经济的发展对配电网[1-2]供电可靠性提出了更高的要求,配电网输电线路的安全运行保障至关重要。巡检机器人作为替代人工的长距离巡检作业移动平台,近年来被电力应用领域所重视。配电网输电线路中,线路绝缘检测是基础作业,配电网输电线路外部绝缘材料若出现漏电现象,不仅会影响配电网的运行,还会给人们带来人身安全的威胁,因此给电力输电线路配备绝缘子检测专项检测机器人,就显得尤为重要。但是,由于近年来配电网输电线路复杂性逐渐提高,绝缘子检测机器人在巡检过程中,经常会遇到各类障碍物从而影响机器人的巡检效果,因此基于机器人自身设备状态,对其进行必要的越障控制,成为当前电力系统亟待解决的问题。
文献[3]在机器人上搭载传感器设备,利用传感器对周围数据实施采集处理,并建立数据融合器对采集数据实施融合,建立周边环境数据集合;再基于数据集合分析结果对机器人行进路线展开越障规划;最后根据规划结果进行移动,从而实现对机器人的越障控制。文献[4]基于地面力学原理,对巡检周边路面参数展开分析,确定周边路面特性;再利用柔性动力学线段模型构建机器人的行走虚拟样机模型,结合路面参数进行虚拟模拟机器人行走路径规划;最后将模拟结果发送至机器人中控界面,控制机器人完成实际巡检环境的安全越障。文献[5]通过D-H法对机器人展开推导,建立雅克比矩阵;再结合拉格朗日动力学方程得到机器人操作臂惯性矩阵,同时构建出机器人动力学的评价指标;最后根据机器人逆运动学反解,获取空间轨迹衡量指标,寻找机器人最佳越障轨迹,完成越障。
由于未能在越障控制前,对机器人展开详细的动力学分析,导致上述方法在对机器人进行越障控制时,获得的控制效果较差。因此,为了提升绝缘子检测机器人越障控制效果,本文提出基于有限状态机的绝缘子检测机器人越障控制方法。
1 绝缘子检测机器人动力学分析
1.1 机器人运行环境特点及结构分析
绝缘子检测机器人需要搭载高清摄像机、红外热成像仪[6]等检测仪器作为载荷系统,沿配电网输电线路方向进行绝缘子路径巡检,巡检过程中主要沿输电线路进行直线段的无障碍、跨越及避让障碍的行驶。绝缘子检测机器人结构如图1所示。
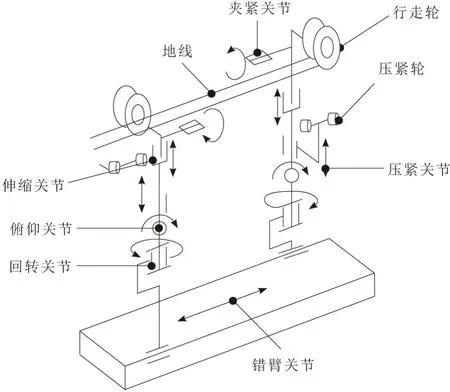
图1 绝缘子检测机器人结构
1.2 机器人越障动力学分析
在开展机器人动力学分析前,需要对机器人重心变化下的越障绕线偏转状态展开具体分析,获取抓线臂绕线偏转模型,如图2所示。
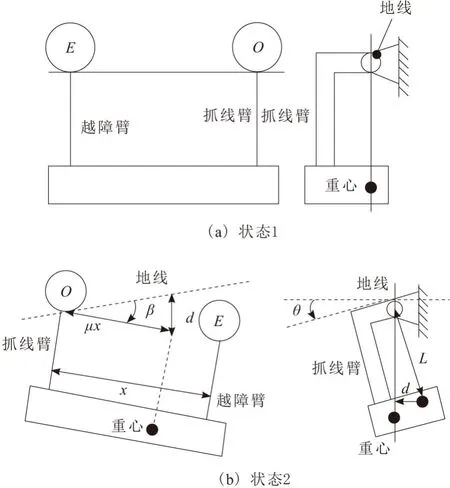
图2 机器人抓线臂绕线偏转模型
基于图2可知,重心移动系数为μ,偏转模型中机器人的抓线臂为O,越障臂为E,重心在与地线垂直面上所移动的距离为d, 越障臂与地线之间夹角为β,移动距离记为x,抓线臂偏转角度为θ,检测机器人臂长为L。基于上述参数设定结果,对绝缘子检测机器人的平衡摆角展开计算,结算结果为
θ≈[μ×sinβ/L]x
(1)
式中:sinβ为绝缘子检测机器人越障臂导轨与地线之间正弦夹角。
基于上述计算结果可知,对绝缘子检测机器人在由于移动而产生的重心偏移下出现的抓线臂转角影响较大的参数为β和x。
设定绝缘子检测机器人越障过程中,滑轮半径为r,钢丝绳弹性系数为α,滑轮转角为φ,传感器电压为v1,控制器电压为v2,获取机器人运动方程[7]为
(2)
式中:T1、T2为不同滑轮线路的转矩向量;t为当前状态;n为运动学参数数量。
基于上述获取的机器人运动方程,将机器人越障时的钢丝绳形变长度设为y1=(rφ-x),越障臂的移动速度设为y2=dx/dt,滑轮角速度设为y3=dϑ/dt,以此将式(2)中的2个方程联立,获取钢丝绳形变长度的一阶导数,具体为
(3)
当绝缘子检测机器人的臂长为0时,机器人的电机磁场电流为I=V/R,电机扭矩为Tn。基于上述计算结果获取机器人系统状态方程为

(4)
式中:J为机器人转矩雅克比矩阵。
2 基于有限状态机的越障控制算法
在上述绝缘子检测机器人的动力学分析结果基础上,建立越障运动学模型,对机器人实施越障扰动控制,从而实现对机器人的越障路径规划,完成绝缘子检测机器人的越障控制。
2.1 机器人越障运动学模型建立
在开展机器人越障控制过程中,有限状态机[8-9]指含有有限个状态变换的概念集,包含有限状态、输入以及状态迁移规则的集合,数学表达式为
M=(P,Ψ,γ,p0,F)
(5)
式中:P为机器人控制系统状态数据集合;Ψ为故障事件输入集合;γ为状态迁移函数;p0为初始状态;F为终止状态集合。
基于上述获取的相关参数,建立机器人绝缘子检测时的自主越障控制模型。模型建立流程如下:
a.对机器人传感器检测信息实施离散化处理。设定手臂前方无障碍向量为χz0,障碍向量为χz1,其中z表示机器人运动位置。以此建立绝缘子检测机器人前臂、中臂、后臂的行走障碍信息集合,过程为
η0={χ00,χ01};η1={χ10,χ11};η2={χ20,χ21}
(6)
式中:η0、η1、η2分别为前、中、后臂的障碍信息集合。
基于上述建立的行走障碍信息集合,对机器人运动关节的数据信息实施离散化处理,建立关节状态信息集合为η3={C0,D0,E0,F0,G0,ι0},机器人前行走臂、中行走臂以及后行走臂状态分别为C0、D0、E0,前压紧臂、后压紧臂状态为F0、G0,机器人行走状态为ι0。基于上述建立的集合,获取机器人避障时的传感器检测信息集合η={ηk|ηk∈η0,η1,η2,η3}。
b.获取机器人越障姿态,并对获取的姿态集合与上述建立的关节状态集合实施对应处理,建立的越障姿态集合为
Vi={V0,V1,V2,…,V6}
(7)
式中:V0为机器人行走常态;{V0,V1,V2,…,V6}为越障时的越障动作序列;Vi为第i个越障姿态。
c.最后,根据上述建立的机器人越障动作序列,将根据有限状态机理论建立的传感器数据集合η作为迁移条件,建立越障运动控制模型,模型表示为
(8)
式中:κi,j为第i个机器人越障姿态Vi向第j个姿态Vj迁移时的控制函数;ζi,j为监督函数;MF为建立的机器人越障运动控制模型。
2.2 绝缘子检测机器人越障扰动控制
基于上述建立的机器人越障运动控制模型,获取越障控制目标函数,结合B样条曲线[10]跟踪方法对模型实施求解,获取模型最佳越障路径规划结果,实现绝缘子检测机器人的越障控制。
设定越障控制模型的自适应加权系数为μ(k),检测绝缘子时得到扰动增量Δζ、Δυ,以此建立越障控制模型的空间路径规划函数,结果为
(9)
式中:ρ为模型参数的分布状态;g(k)为空间路径规划函数;w(k)为越障路径数量;λk为寻优系数;k为越障次数。
最后,基于上述建立的空间路径规划函数,采用最大似然估计方法,获取机器人最佳越障评估协方差矩阵,通过计算取得最佳越障路径,从而实现机器人绝缘子检测时的越障控制[11-12],结果为
uj(k)=Oj(k)/g(k)×ϖj(k)
(10)
式中:uj(k)为第j个姿态下的最佳越障路径;Oj(k)为第j个姿态下的最佳越障评估协方差矩阵;ϖj(k)为第j个姿态下的模型参数融合向量。
3 测试与分析
为了验证上述机器人越障控制方法的整体有效性,需要对此方法进行测试。
3.1 测试准备
测试过程中以基于有限状态机的绝缘子检测机器人越障控制(本文方法)、基于多传感器信息融合的输电线路巡检机器人自主越障方法(文献[3]方法)、煤矿履带巡检机器人多体动力学建模及越障仿真方法(文献[4]方法)为对比方法进行测试,以验证本文方法的可行性与越障控制性能。测试对象如图3所示。

图3 绝缘子检测机器人
为验证机器人越障方法有效性,基于仿真平台建立仿真环境,将机器人越障障碍物直径大小设为0.38 dm,距配电网电缆中心2 dm,长度为2.4 dm。测试过程中,将机器人越障时的关节角度、电流值大小作为机器人越障控制性能检测指标,结合机器人越障控制实际应用效果,检测不同越障控制方法在实际越障时的有效性。
3.2 越障控制性能测试
采用本文方法、文献[3]方法和文献[4]方法开展机器人越障控制时,对越障过程中的关节转向角度、电流输出大小展开测试,对比结果如图4所示。
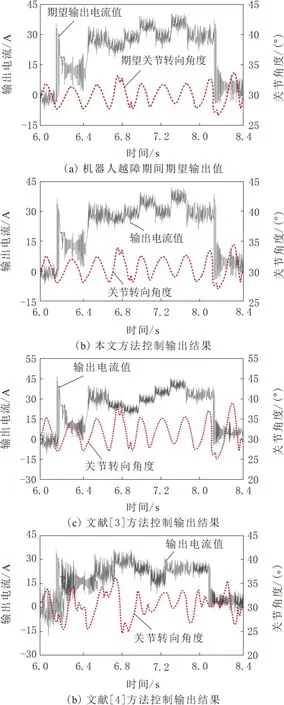
图4 不同方法的机器人关节角度、电流输出测试结果
分析图4可知,在测试过程中,本文方法基于机器人结构对绝缘子检测机器人开展了详细的动力学分析,所以经本文方法越障控制下测试出的机器人越障关节转向角度与输出电流与期望转向角度、输出电流基本一致;文献[3]方法在开展越障路径规划时,采集的周边环境数据中未包含机器人越障姿态变换数据,导致该方法在测试过程中,测试结果与期望输出之间存在一定差距;而文献[4]方法在越障控制时,模拟越障过程未能将实际越障中可能出现的问题考虑其中,因此该方法测试结果与实际期望输出之间存在较大差距。
3.3 越障控制效果对比
基于越障控制性能测试结果,将上述3种越障控制方法运用到实际绝缘子检测中,获取3种方法在越障过程中的控制曲线,结果如图5所示。

图5 不同方法的实际越障控制效果
分析图5可知,文献[3]方法与文献[4]方法在越障控制过程中测试出的越障控制曲线与期望控制曲线之间存在较大差距;而本文方法在控制越障时,测试出的控制曲线与期望控制曲线之间较为接近。由此可知,本文方法在绝缘子检测过程中的越障控制效果更好。
4 结束语
随着配电网的智能化发展,输电线路巡线机器人的检测范围愈加广泛。为保障配电网能够高效率地完成电力输出任务,输电线路绝缘子检测机器人的越障控制显得尤为重要。针对传统越障控制方法中存在的问题,提出基于有限状态机的绝缘子检测机器人越障控制方法,在机器人动力学分析基础上,构建机器人越障控制模型,建立目标越障路径规划函数并对模型实施求解,获取最佳越障路径,以实现绝缘子检测机器人的精准越障控制。
