基于改进BA-PNN的智能变电站二次设备故障定位方法
2024-04-22曹海欧王义波孙弘毅杨金龙
曹海欧,吴 迪,薛 飞,王义波,孙弘毅,杨金龙
(1.国网江苏省电力有限公司,江苏南京 210000;2.国网湖北省电力有限公司,湖北武汉 430070;3.国网宿迁供电分公司,江苏宿迁 223800;4.武汉凯默电气有限公司,湖北武汉 430223;5.三峡大学电气与新能源学院,湖北宜昌 443000)
0 引言
随着我国电力科技的发展,数字技术、通讯技术和控制技术等先进技术相融合正推动传统电力系统向高度数字化、智能化的方向演进[1-3]。智能变电站是智能电网的关键组成部分,其二次系统的网络化虽然加强了设备之间的相互联系,但也带来了巨量的系统状态信息,导致在发生故障时,对故障进行快速定位及分析变得尤为困难[4-6]。深度学习有着卓越的数据分析能力,能够准确快速定位到二次系统的故障点,利用人工智能来实现对二次设备故障的精确分析已成为智能电网建设的一个重要方向。
在传统故障分析方面,文献[7]将数据进行对比,依据结果对设备的运行状况评估,提出了趋势评估策略,但该方法只适用于历史数据较全的情况,当新故障发生时所得结果将出现较大偏差。文献[8]采用举证法,利用二次系统通信链路特征得到了网络发生故障的范围,此方法适用性不强,无法对故障特征进行进一步分析。文献[9]建立了故障树,以此得到设备发生故障时与告警信号的联系,虽能够分析更多的故障特征,但当告警信号较多时,无法准确实现故障定位。
在人工智能的应用方面,文献[10]分析了不同机器学习算法之间的差异,并将其进行综合,提出了二次设备状态评估法,该方法虽然获得了更好的评估效果,但加大了训练量,过程繁杂。文献[11]分析了故障特征,同时利用循环神经网络,能够更为准确地定位故障,同时增强了容错能力,但会面临维度过高导致网络结构过于复杂以及训练样本不均衡问题。文献[12]利用深度置信网络对故障状态进行提取,虽然能实现故障定位辨识,但其搜索范围较大,样本难以获取完全。
本文提出了1 种基于改进蝙蝠算法优化概率神经网络(Bat Algorithm Optimizes Probabilistic Neural Networks,BA-PNN)的智能变电站二次设备故障定位策略。首先,提出了1 种改进蝙蝠算法优化概率神经网络方法来提升PNN 的性能;其次,基于故障特征集搭建BA-PNN 神经网络结构,搭建了基于BA-PNN 神经网络的故障定位模型;然后,根据大量样本对BA-PNN 进行训练,训练成功后,将BAPNN 网络保存为模型。最后,以经典的智能变电站线路间隔示例,通过不同算法的比较和分析,验证所提方法的有效性和准确性。
1 BA-PNN算法
1.1 神经概率网络
PNN 的实质是1 个分类器,通过实现贝叶斯决策,获得分类的结果,具体实现方法为概率密度函数的无参估计[13-14]。概率神经网络的拓扑结构由输入层、模式层、求和层和输出层4 部分组成,其结构如图1 所示。其中,xt为输入层输入的特征量,t为特征量的总数,该层神经元的个数与样本特征量的数量相同;xi,j为第i分类中的第j个样本,该层神经元个数与输入样本的数量相同,假设其独立且同分布;Pi(xt)为第i类分类的高斯分布概率分布函数(Gaussian Distribution Probability Distribution Function,PDF),该层的神经元个数和PNN 分类模式的数量相同;D(xt)为输入层xt的输出,对求和层Pi(xt)进行概率评估。

图1 PNN结构图Fig.1 PNN structure diagram
在PNN 体系结构中,通常用高斯函数作为计算单元[15]。求和层神经元将从模式层获得的每个类别的输出加起来[16],Pi(xt)可表示为:
式中:d为训练数据集的维数;Ni为第i类模式总数;xt为模式层矩阵;xij为样本层矩阵;σ为平滑参数。
D(xt)可表示为:
式中:k为模式层分类数。
1.2 蝙蝠算法
蝙蝠算法(Bat Algorithm,BA)是1 种根据蝙蝠的回声定位能力和其他相关行为得到的仿生优化算法[17-18]。设蝙蝠在Pz位置随机飞行,速度为Vz,最大声波脉冲频率为fmax,最小声波脉冲频率为fmin,n为虚拟蝙蝠的数量。对于给定查询空间中的位置Pz和速度Vz的变化,每个时间步长s内估计的位置和速度的解可以表示为[19]:
式中:fz为个体蝙蝠声波脉冲频率;β为从均匀分布中获得的随机数;P∗为从n个蝙蝠中获得的当前局部最佳位置;和分别为z次迭代中蝙蝠个体在步长s+1 处飞行的速度和位置。
每个蝙蝠都是根据响度和脉冲发射率参数的随机值分配的,这2 个参数控制密集局部搜索。
在局部搜索中选择最优解后,使用随机游动生成新的解,此时位置更新可以表示为:
式中:Pold为最优蝙蝠个体的位置;Pnew为随机游动后的最优蝙蝠个体的位置;ε为变化系数,ε∈[-1,1];Ar为i次迭代中种群的平均响度。
1.3 改进BA优化概率神经网络
在传统PNN 中,由于高斯函数的性质与随机变量的性质相似,通常使用高斯函数作为计算单元。为了将PNN 的性能通过合并达到优化,本文选择使用拉普拉斯分布。拉普拉斯分布具有尖峰和较宽的尾部,有助于获得非线性决策边界,提高了模型对异常值的鲁棒性。高斯分布和拉普拉斯分布的差异如图2 所示。此时,第i类求和神经元输出Fi(xt)的表达式为:
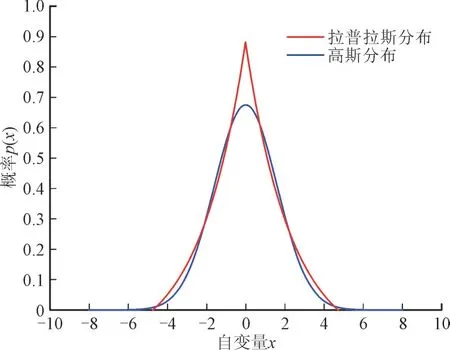
图2 拉普拉斯分布与高斯分布的差异Fig.2 Difference between Laplacian distribution and Gaussian distribution
式中:Wij为第i分类第j样本的权重向量;σij为第i分类第j样本的平滑参数。
此外,为了保证分类的准确性,利用向量的分布差来代替范数差,在PNN 中第i分类第j样本的权重向量Wij可以表示为[20]:
式中:Avg_distancei为范数距离,表示第i分类中不同样本距离分类中心的平均值;rij为第i分类第j样本的距离期望值;μi为第i分类中所有样本的距离期望值。
PNN 的网络性能取决于平滑因子σ,如果平滑因子的选取不当,算法会收敛不到合适的解[21]。本文根据神经网络的准确性、特异性和灵敏度提出了1 种基于BA 的适应度函数来选取PNN 的平滑因子的方法,改进优化算法的效果取决于决定解质量的适应度函数。
设神经网络的灵敏度函数为A,特异性函数为B,则A,B可分别表示为:
式中:TP为正样本识别个数;FN为未被识别的正样本个数;TN为负样本识别个数;FP为未被识别的负样本个数。
为了获得最佳的分类模型,需要获得尽可能大的灵敏度和特异性,BA-PNN 的适应度函数Minf(A,B)可表示为:
式中:φ为p1和p2达到平衡时的熵,表示p1和p2达到平衡时,式(9)可以取得最值的程度。
适应度函数如图3 所示。图3 内部点的位置表示σij。利用BA 算法寻找σij的最优解,其声波脉冲频率f和随机数β需要满足约束:
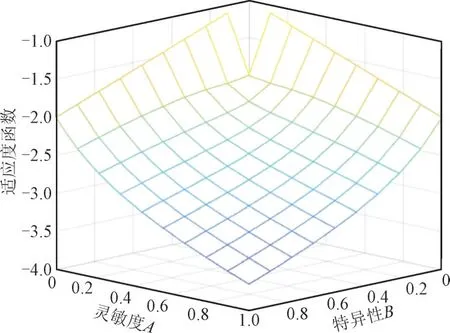
图3 适应度函数Fig.3 Fitness function
BA-PNN 算法分为2 个阶段。在第1 阶段,设计一种新的适应度函数,基于BA 求解模式层中的平滑因子最优值σi。在第2 阶段,在求和层中将平滑因子σi代入到拉普拉斯分布中计算每个样本输出的总和。训练流程图如图4 所示。
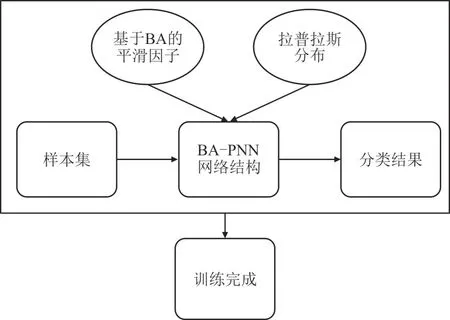
图4 BA-PNN训练流程Fig.4 BA-PNN training process
2 二次设备故障特征信息分析
2.1 故障元件与故障信息的关联映射
当二次设备(合并单元、继电保护装置、测控装置等)发生故障时,故障信息以报文的方式通过站控层和间隔层网络发送给继电保护信息系统,信息系统的数据采集单元采集得到报文,再由管理单元分析报文,完成配置、预整理、过滤等一系列措施后,得到故障信息。基于大量的二次设备故障历史信息,分离出与故障元件紧密相关的故障信息,并通过查阅相关文献资料及技术规范[22-25],二次设备常见的故障特征信息如表1 所示,包含二次设备采样值(Sampled Value,SV)和二次设备通用面向对象的变电站事件(Generic Object Oriented Substation Event,GOOSE)。
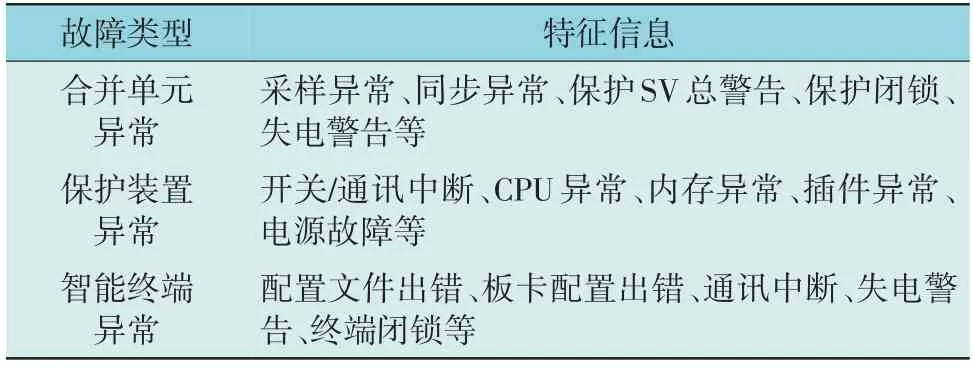
表1 二次设备常见的故障类型及其特征信息Table 1 Common fault types and characteristics of secondary equipment
2.2 故障特征量的选择和表征
对二次设备故障类型进行分类编号,并采集警告信息。采集的数据类型为开关量,当收到警告信息时值为1,无警告信息时值为0。其运行状态信息模型如表2 所示。
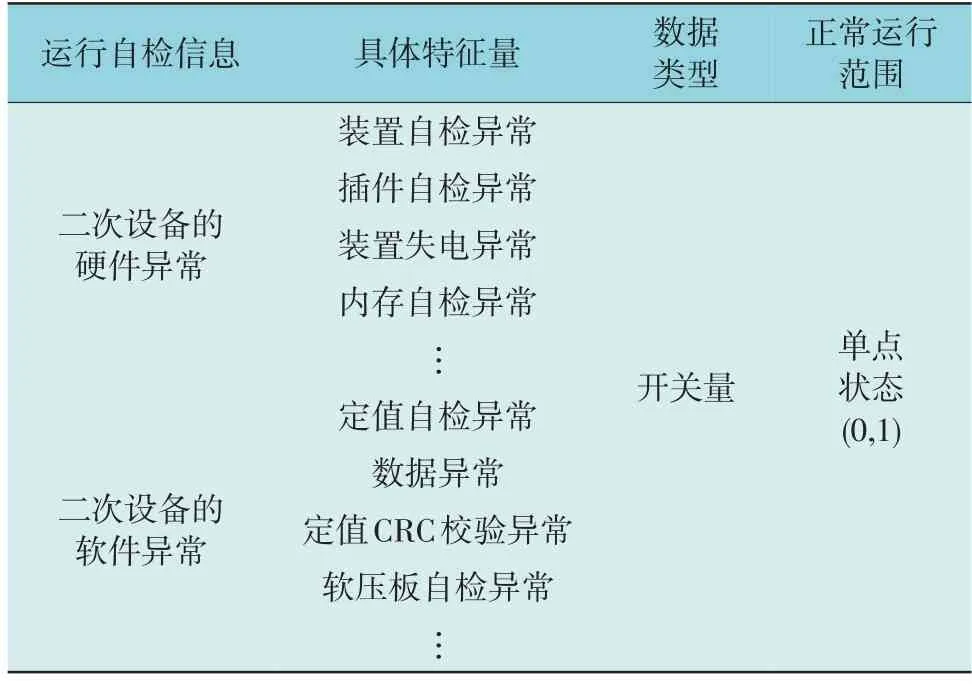
表2 二次设备的运行状态信息模型Table 2 Operating status information model of secondary equipment
当故障发生后,构造故障特征集Xs表征故障,第s起故障事故的故障特征集Xs为:
式中:XZTs为二次设备运行状态数据;XSGs为SV/GOOSE 接收状态数据;XCYs为采样值数据;N为故障事故的数量。
二次设备运行状态数据XZTi主要为智能终端、合并单元和保护装置的自检信息状态,如式(12)所示:
式中:k,m和u分别为二次系统中智能终端、合并单元和保护装置的总数;XML_m,XPL_u和XIT_k为故障时第m个合并单元、第u个保护装置和第k个智能终端的软硬件自检信息,包括自检异常Scan、同步异常Cab、版本错误Ver、装置闭锁Lout、内存出错Mer、校验出错Cer等。
SV/GOOSE 链路状态信息XSGs主要包括二次设备的SV/GOOSE 链路报文接收状态XSs和XGs,如式(13)所示:
式中:XSV_l为第l条SV 链路的状态信息;XGOOSE_w为第w条GOOSE 链路的状态信息。
采样值XCYs为保护装置双通道A,B,C 三相电压电流采样值,如式(14)所示。
式中:C1和C2分别为通道1 和通道2 中的三相电压电流采样值;I,U为电流和电压;1,2 为通道1 和通道2。
3 基于BA-PNN的故障定位模型
本文采用深度学习的方法构建一个非线性映射模型,将多维度故障特征数据映射到故障发生处。其相应映射关系如图5 所示。

图5 故障信息和故障类型的映射关系Fig.5 Mapping between fault information and fault types
本文故障定位框架流程图如图6 所示。

图6 基于BA-PNN的故障定位流程图Fig.6 Fault location flowchart based on BA-PNN
1)在特定的故障范围内,运用故障特征集的方法,选择历史故障特征数据。
2)构建BA-PNN 神经网络框架,基于拉普拉斯分布和BA 平滑因子σij对输入的数据进行分类,输出故障位置结果。
3)根据大量样本对BA-PNN 进行训练,通过对参数进行改进,来获得最高的定位准确度。
4)完成训练,将BA-PNN 网络保存为模型。当二次系统遇到故障或异常时,只要有断面故障特征数据,即可得到故障部分的位置。
4 算例分析
4.1 算例简介
为验证所提智能变电站二次设备系统故障定位方法的有效性,本文以典型智能变电站线路间隔为例,检验所提的故障定位方法,图7 为其保护区段拓扑结构。其中,J1—J12 表示光纤编号。
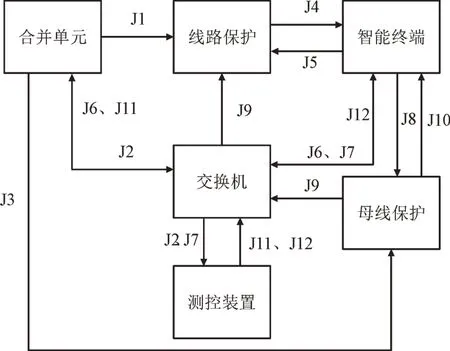
图7 保护区段拓扑结构Fig.7 Topology of protected section
在该保护区段中含12 条链路,该间隔的报文信息流如表3 所示。

表3 报文间隔信息流Table 3 Packet interval information flow
建立的训练样本的输入矩阵如表4 所示,一共选择7 个特征量,输入节点为7,每1 列为1 个样本值。由于篇幅原因,故障分析中故障位置最多为2个,仅展示6 个样本的输入矩阵。
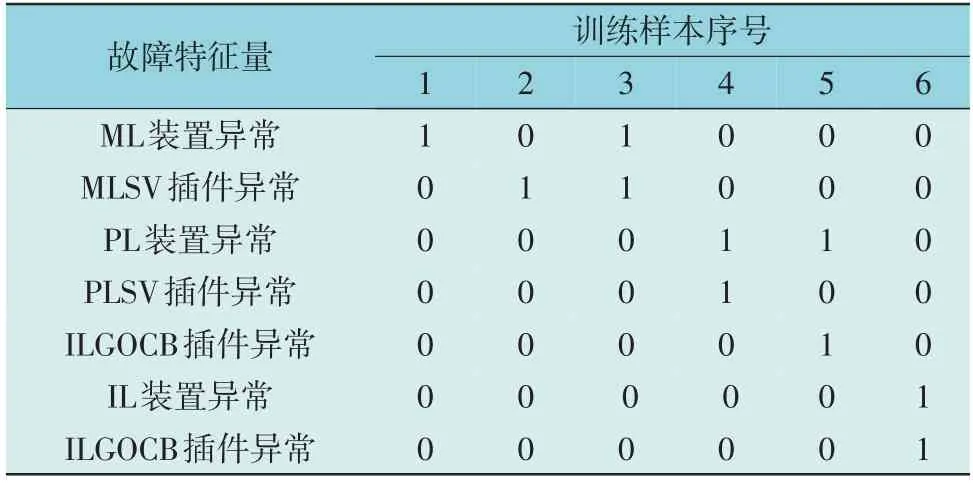
表4 6个训练样本的输入矩阵Table 4 Input matrix of training samples
4.2 BA-PNN神经网络的样本训练
对6 个样本进行故障类型编号,并对每个故障类型进行故障定位模拟,其中训练样本总数为4 703,测试样本总数为1 192。对测试样本进行检测以得到最终的训练效果,如果检测的正确率达到95%以上,训练结束。BA-PNN 训练结果如表5 所示。

表5 BA-PNN训练结果Table 5 Results of BA-PNN training
为了证明算法的稳定性,将测试样本作为模型的输入,进行故障类型预测,选择50 个样本运用到模型中。模型预测分类结果如图8 所示。

图8 BA-PNN预测结果Fig.8 BA-PNN prediction results
在选出的50 个预测样本中,样本10 和样本22预测错误,BA-PNN 的预测正确率达到96%,满足系统对精确度的要求。
4.3 BA-PNN神经网络优化情况
在样本训练故障定位模型的过程中,选择平滑因子和训练样本为自变量,模型准确率为因变量,对BA-PNN 训练模型的性能进行分析,计及参数变化对故障定位精度的影响,其结果如图9 所示。
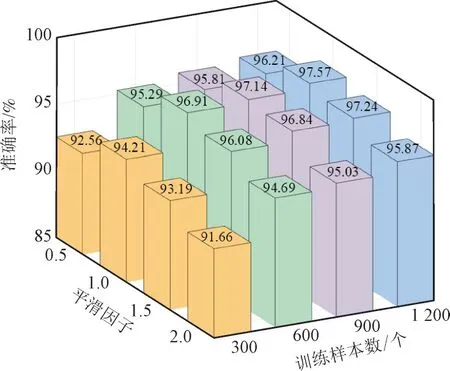
图9 不同参数下的定位准确度Fig.9 Positioning accuracy under different parameters
由图9 可知,训练样本越多,故障定位的分类准确率也越来越高。而最初的分类准确率首先随着平滑因子σ的增加而增加,然后随着σ的增加而降低。
平滑因子的选择对于分类器性能的影响较为明显。为了找出网络内最优平滑因子σ,设置不同的平滑因子,输入数据集测试准确度。使用BAPNN 算法时不同σ与定位准确率的关系如图10 所示。当平滑因子设置为0.7 时,本文算法定位精度可达到94.96%。
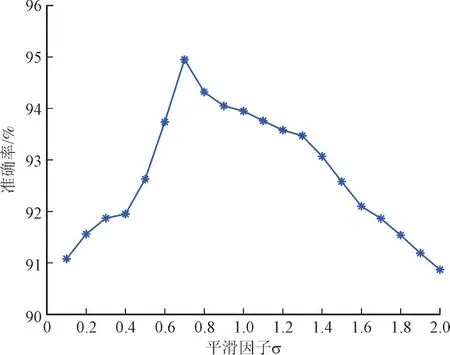
图10 准确度与平滑因子的关系Fig.10 Relationship between accuracy and smoothing factor
4.4 不同方法性能对比
为了更好地说明BA-PNN 算法利用拉普拉斯分布和改进权重系数后的优势,将BA-PNN 与常规PNN 算法进行比较,分析相同平滑因子下不同算法的精度区别,两者方法的测试精度结果如图11 所示。与PNN 相比,BA-PNN 在不同σ条件下测试精度均高于PNN 算法。
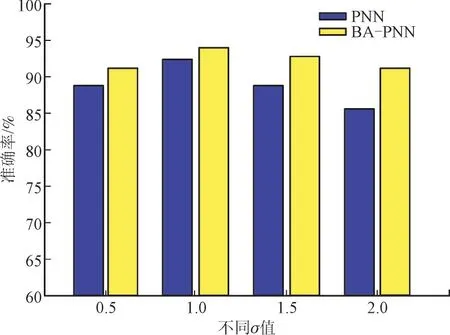
图11 不同方法的测试精度对比Fig.11 Comparison of test accuracy with different methods
为了分析本文所提方法的性能,将传统BP 神经网络算法、PNN 算法和BA-PNN 算法进行对比。按照神经网络在故障定位中的分析流程,输入相同的数据样本进行故障定位分析对比。不同方法的准确性与误差对比结果如图12 所示。

图12 不同定位方法的性能分析Fig.12 Performance analysis with different positioning methods
对比表明,当系统出现故障诊断需求时,BAPNN 算法在准确率和误差率两方面均优于传统神经网络算法和PNN 算法,能够更为精确地对故障进行定位和分析,同时也增强了故障定位分析的鲁棒性。
5 结论
针对概率神经网络在二次设备故障定位中训练规模较大、容易受到平滑因子干扰的问题,本文提出了一种基于BA-PNN 的智能变电站二次设备故障定位方法。
算例表明,将拉普拉斯分布代替高斯分布提升了数据分布量度的准确性,同时适应度函数可以在灵敏度和特异性之间保持平衡,提出基于BA-PNN的二次设备故障定位模型具有准确处理故障定位的能力,与传统BP 算法和PNN 算法相比,具有更高的准确性和更小的误差。但考虑到不同智能变电站存在结构、规模以及配置方面的差异本文所提方法仍然存在一定的局限性。在平滑因子的选择上虽然本文的方法可以迭代出神经网络的最优平滑因子,但面对大规模故障样本时,会加大迭代过程的复杂性,从而增加人工与时间成本。
