下肢助残训练机器人设计与仿真分析
2024-04-22张同瓒卢绍田王成军何祎文
张同瓒,卢绍田,王成军,何祎文
(安徽理工大学 人工智能学院,安徽 淮南 232001)
0 引言
目前,随着我国人口老龄化不断加剧,以及因疾病或意外事故等诸多原因导致患有肢体运动障碍疾病的患者不断增多。在依赖传统药物进行治疗的同时,使用外部机械进行辅助治疗的比重也不断增加,一些研究人员设计出了用于辅助患者康复的下肢助残训练机器人。
目前,康复助残外骨骼机器人的知名品牌主要包括奥地利SCHEPP、瑞士Hocoma、美国Woodway、以色列Rewalk、美国EKSO、日本Cyberdyne、新西兰Rex Bionics等品牌。其中使用最广泛的是瑞士Hocoma公司的Lokomat,该平台已经是全球使用非常广泛的机器人康复平台[1]。可见在助残康复医疗领域,技术前沿领域仍主要集中在发达国家。国内用于下肢康复训练的机器人于2020年开始大规模进入临床试验阶段。
目前,国内下肢存在运动功能障碍的患者主要包括脑瘫、偏瘫、截瘫等后遗症在内的残疾人有近1500万,因衰老导致步行能力丧失的失能老人近4000万,同时每年增加2000多万脑损伤、脊髓损伤新发患者。而亟需康复技术人员约35万人,但从事康复工作的专业人员还不到2万人。因此,增加外骨骼康复机器人来协助进行康复训练意义重大。
现有的康复机器人大体可分为3类,即“站立式”、“多体式”和“坐卧式”,如图1所示。本文设计的下肢助残训练机器人结构的定位是:站立式、完全穿戴式、运动辅助型机器人[2-3]。本研究主要聚焦于结构设计、运动学分析、静力学分析等,其中重点在于根据人体结构并考虑影响下肢运动的关节[4](主要包括髋、膝、踝关节)设计出合理的结构。

图1 下肢助残机器人分类[2]
通过对图1 所示的不同类型下肢助残机器人进行对比研究,进行运动学分析与静力学分析。并使用SoildWorks等基础建模工具进行设计,单腿自由度分布采用髋+膝+踝的设计,然后设置不同的参数进行拓扑优化、静力学分析与运动学分析,得到最优的拓扑结构,将其作为最终优化方案。将最终的优化方案与未优化的方案进行对比与评估,从成本与效果等方面进行考量,确定最后的设计方案,其具体步骤如图2所示[5]。

图2 设计流程图
1 结构设计
1.1 结构介绍
根据患者下肢的康复要求,下肢助残训练机器人总体结构图如图3所示。其主体结构包括腰部结构、气动推杆、髋关节、大腿联动件、膝关节、小腿连接件、气动弹簧、踝关节等。其中足掌地板、气动弹簧力起到辅助支撑的作用。力传递由下往上依次为踝关节、小腿连接件、膝关节、大腿连接件、髋关节、气动推杆,最后传到腰部,以人体的腰部作为支撑。

图3 下肢助残机器人总体结构图
1.2 下肢各关节的运动分析
以中国男性平均身高172 cm、体重61.4 kg为例。该下肢助残机器人涉及的人体参数如表1所示。
表1 正常成年人行走相关参数[6]
在患者穿戴进行康复训练时,下肢助残训练机器人的关节与人体关节联动,实现同步运动,因此只需要控制好髋关节、膝关节与踝关节,即可在一个合适的范围内运动。根据对本校成年人关节转动的大量数据,取平均值得到表2中的数据。

表2 青少年运动时各个关节角度范围
为了简化结构模型,本方案设计的关节点采用单个铰链进行简化代替,如图4所示。

图4 整体示意简图
2 运动学仿真分析
2.1 正运动学建模
根据机械装置作用位置的不同,可分为髋关节康复机器人、膝关节康复机器人、踝关节康复机器人及多关节结合康复机器人,根据图4中所示,下肢助残训练机器人属于多关节康复机器人,其关节分别对应人体下肢的髋关节、膝关节及踝关节,且全部为旋转关节,单侧下肢位姿变换(θ)指数积公式[8]为
式中:θi为髋关节、膝关节与踝关节的转动角度;ξi为相同3个关节轴承的单位运动旋量,计算公式如式(2)所示;ξi的李代数在式中使用ξ^i表示;指数运算eθiξ1定义如式(3)所示;i为旋转关节轴数。
式中:ω为单位角速度矢量,ν为单位线速度矢量,r为旋转轴任意点的位置矢量,ω^为ω的反矩阵。
式(1)所示为下肢助残训练机器人的初始位姿,在通过选择髋关节支架中点,将其作为基准坐标系{U0},从而求解得双足跟末端位姿矩阵(θ)[9]为
式中:i=1、i=2分别为左腿、右腿,PUS1为左髋关节在坐标系惯性坐标系{S}中的位置矩阵,PUS2为右髋关节坐标系在惯性坐标系{S}中的位置矩阵。
然后代入连杆相关参数,通过所列计算公式可求解出位姿的显式表示(cos θ的缩写使用cθ表示,sin θ的缩写使用sθ表示):
进而求得足跟末端运动方程为(px、py和pz分别为x、y和z方向的位移):

2.2 逆运动学分析
逆运动学求解分解为3个子问题,对下肢助残训练机器人机构进行分析,分为3个步骤:1)求解θ2;2)求解θ1;3)求解θ3。其中逆运动学方程组为(θ1、θ2、θ3分别代表髋关节转动角位移、膝关节转动角位移与踝关节转动角位移,旋转矩阵中位于第一行、第一列的元素使用nx表示):
2.3 踝关节速度矢量与雅克比矩阵计算
踝关节末端的速度矢量用VB表示,当前位姿的单位运动旋量组成速度雅可比矩阵,整理得计算公式组为:
式中:ω′为当前位姿下单位旋转速度矢量,ξi′为当前位姿下单位运动旋量,r′为当前位姿下关节轴上随机任取一点的位置矢量,JS为空间速度雅克比矩阵,JB为物体速度雅克比矩阵,Adg为求解位姿矩阵ST g(θ)的伴随矩阵,θ为各关节角速度,i为各关节轴数[10]。
求解出踝关节末端的具体速度,并计算出雅可比矩阵为
式中:ωx、ωy、ωz分别为绕x、y、z轴的角速度,νx、νy、νz分别为x、y、z轴的线速度,θ23=θ2+θ3。
由式(8)可以计算出,踝关节末端在z轴方向转动速度ωz≠0,在x轴和y轴方向有线速度vx和vy,由踝关节扭动、脚部下落与脚部向前移动3个运动方向合成取得,计算公式为:
通过代入相关参数——足跟末端的操作空间速度矢量,进行逆运算可解出髋关节、膝关节和踝关节的角速度矢量,并分别用ωh、ωk、ωa表示为:
通过利用上述公式进行运动学求解,即可分别求得3个关节的线速度、位移和角速度等信息。并通过运动学计算表明所设计的机械结构可以较好地实现相关功能。
3 静力学分析
作为机械结构的设计基础,静力学分析是设计过程中不可忽视的环节,因为材料的受力状况不仅会影响机器人的使用寿命,而且会影响机器人的基本功能,因此静力学分析不仅可以提高产品质量,而且可以及时发现在设计中存在的不足之处,从而优化出更加合理的设计方案,并在分析的过程中可以为机器人的优化设计积累数据。本文对下肢助残训练机器人模拟在实际工作条件下部分零件的应力、应变情况进行了研究。
3.1 使用材料——低合金结构钢
对康复机器人的关键零部件进行静力学分析与优化设计,通过查阅《工程材料》,发现结构钢具有良好的抗拉强度、屈服强度、较高的强度质量比(这意味着支撑同样的载荷可以使用较少的材料)。结构钢另外两个重要的物理特性是具有较好的延展性和出色的耐腐蚀性。
结构钢主要包括碳素钢和低合金钢两类:
1)碳素结构钢的钢级范围σs为195~285 MPa,具有较低的屈强比σs/σb≤0.65;
2)低合金结构钢的钢级范围σs为255~500 MPa,具有较高的屈强比σs/σb≤0.70[11]。
通过对二者的钢级范围及屈强比进行比较,发现低合金结构钢具有更加优良的性能,其可以在满足应力强度的前提下减少材料的使用,从而有效地控制生产成本。因此本研究在初期选用“低合金结构钢”作为加工材料。然后对气动推杆、髋关节末端等零部件进行静力学分析并进行结构改进。表3为结构钢的基本材料属性。

表3 结构钢的材料属性
图5和图6分别为对未经过优化和经过优化的气动推杆进行静力学分析所得结果。与优化前相比,优化的结构对未优化结构进行抽空处理,可以有效节省材料。由图5和图6可知,对气动推杆结构进行结构修改后,应力分布最大值从未优化的12 MPa变为优化后的9.7 MPa,形变量从未优化的0.159 34 mm减小为优化后的0.155 mm,应力分布更加合理。从而使得结构设计更加安全,有利于延长使用寿命[12]。
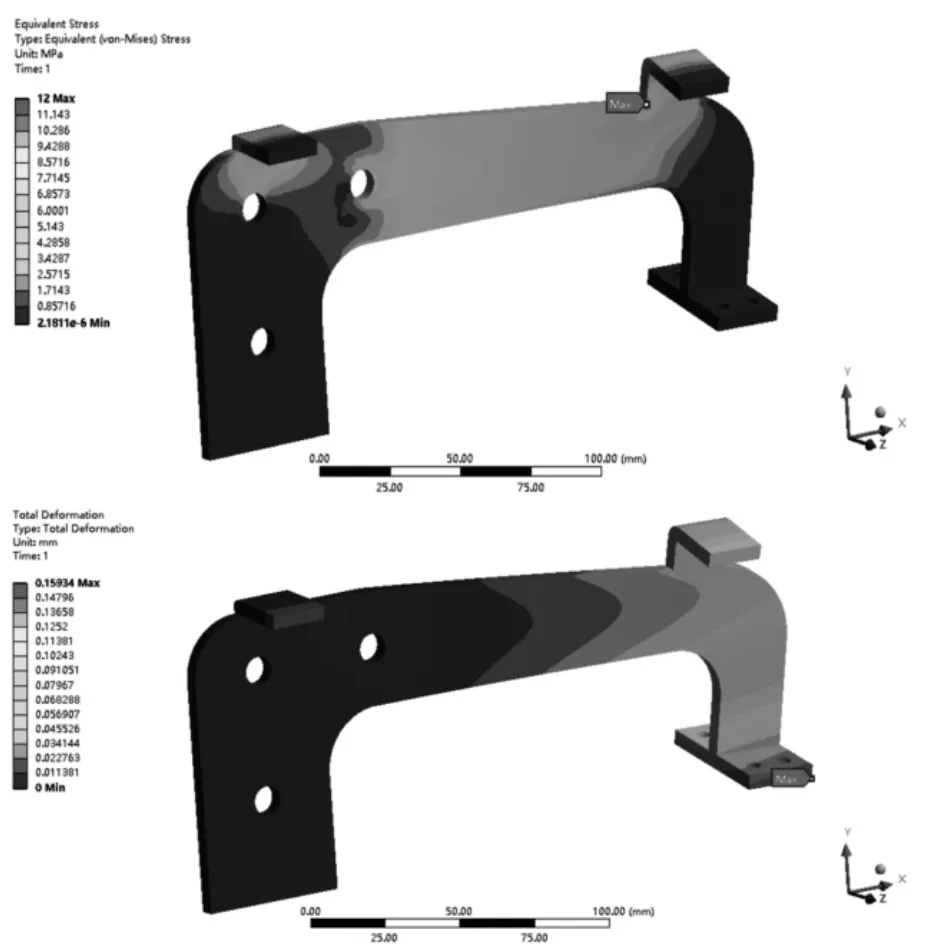
图5 气动推杆未优化仿真分析结果

图6 气动推杆经优化后仿真分析结果
对髋关节末端未优化的静力学分析结果如图7所示。对髋关节末端边缘进行弧度化处理,在外形上做出一定的优化,并进行掏空处理,所得静力学分析结果如图8所示。

图7 髋关节末端优化前静力学分析结果
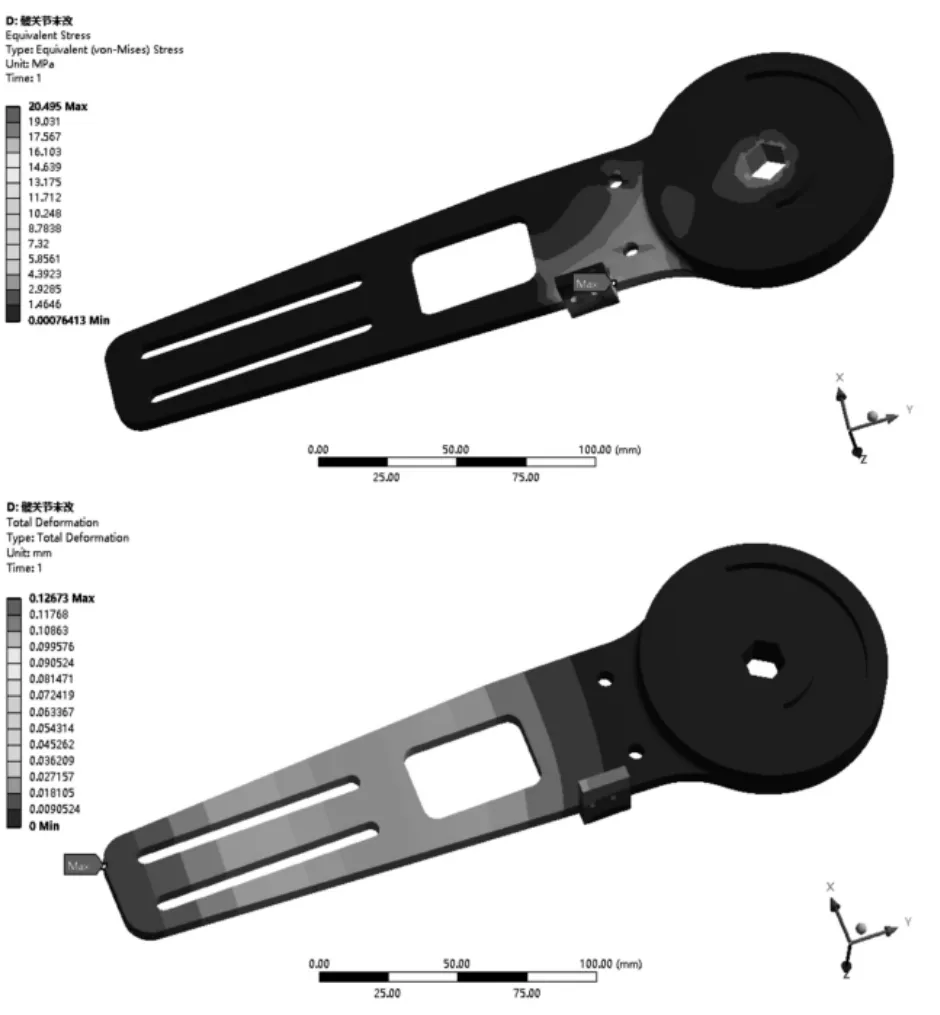
图8 髋关节末端优化后静力学分析结果
对图5~图8中的4组图片数据进行对比分析,所得结果如表4所示。
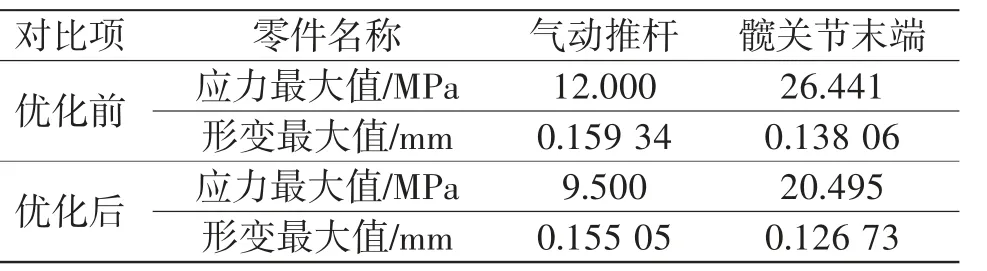
表4 应力分析表
分析表4可知,多个零件经过优化之后受力应变与形变量都得到了一定程度的改善,气动推杆的应力最大值从原先的12 MPa减小为9.5 MPa,髋关节末端从原先的26.441 MPa变为20.495 MPa;气动推杆的形变最大值从原先的0.159 34 mm变为0.155 05 mm,髋关节末端从原先的0.138 06 mm变为0.126 73 mm。可见经过结构优化的零件可使得受力更加合理,应变更加微小,经过多次拓扑优化,最终本文使用上述优化结果进行实物制作。
但通过多次结构优化,零件的性能提升十分有限,如可以采用力学性能更加优越的材料,可以更好地节省材料,更好地满足设计需求、延长使用寿命及提高力学性能。
3.2 进一步优化使用材料——碳素材料
查找相关材料后发现,如采用碳素材料作为结构材料,可以让机械结构质量更加轻便,性能更加优越。碳素材料虽然成分比较单一,但其结构属于乱层结构,其微晶大小大部分在50 A˚左右,集高强度与低模量的优良性能于一体[13],并且这种材料已经在医疗器械上进行了广泛的应用,如心脏瓣膜、骨板、牙根和人工关节等人造关节中,因此如对下肢助残训练机器人的性能做进一步优化,可使用碳素材料作为结构材料,其具体力学性能如表5所示。

表5 医用碳素材料的力学性能[13]
从表5可以看出,医用碳素材料的抗折强度弹性模量相对于人体骨骼具有更好的力学性能。碳素材料可以承受周期性载荷而且不出现退化,其中对于频繁改变的应力,也有良好的抗拉、抗压、抗折和抗扭转应力的强度。而且乱层结构碳素材料可以承受周期性的载荷不会出现退化,可以使得下肢助残训练机器人有更好的抗疲劳性能[13]。因此如对下肢助残训练机器人的力学性能做进一步的提升,可选用碳素材料作为结构材料。
4 结语
随着中国现代医疗条件的不断提高,社会各界对下肢助残训练机器人的应用与升级越来越重视。根据下肢轻度瘫痪肌肉的要求,本研究设计了一种结构简单的下肢助残训练机器人,并进行了分析研究。运动学和静力学分析结果表明,所设计的机器人机械结构应力分布合理,应变较小,有利于实现提高力学性能、延长机械使用寿命的目标。研究结果还表明了该下肢康复训练机器人结构设计的可行性,能够对患者的下肢康复起到一定的作用。