基于ANSYS的折臂式高空作业车工作臂模态分析
2024-04-22冯辉农权孟杰史尚昆罗芸莹
冯辉,农权,孟杰,,史尚昆,罗芸莹
(1.贵州詹阳动力重工有限公司,贵阳 550006;2.太原科技大学,太原 030024)
0 引言
高空作业车主要用于运送工程装备或工作人员到指定高度作业的工作平台,现已广泛应用于建筑业、园林业、消防等有相关需求的领域[1]。折臂式高空作业车是通过与折臂相连接的液压缸的伸缩实现高空作业平台的升降。随着高空作业车工作臂工作高度的增大,工作臂的迎风面积也随之增大,风载对工作臂的安全性和稳定性影响会愈加明显,这会对安置在工作平台上的工作人员和货物产生较大的威胁,因此分析工作臂在施加风载时的模态和频响是十分重要的。陈鑫[2]对多种工作环境下的折臂式高空作业车的作业部分进行计算分析,确保其在实际中的可用性及安全性,同时对高空作业车的作业部分进行了轻量化处理,降低其质量及制造成本。王昭君等[3]以重力法为理论基础,通过ADAMS对在极限工况下的折臂进行模态分析。李向良等[4]主要对折臂式高空作业车的工作臂进行结构分析和优化,使工作臂能够承受要求的应力与应变,为以后更加系统、更加深入的研究提供了研究基础。王添羽等[5]对作业车的工作环境作了具体分析,利用TRIZ方法分析了在不同环境下工作臂的情况,并针对分析结果提出了相应的优化方法。
本文以某种折臂高空作业车为研究对象,对其利用ANSYS Workbench进行模态和频率响应的有限元分析。在验证有限元模型正确性的同时,在模态分析的基础上进行频谱响应分析,找出结构问题所在并针对其提出解决方法。
1 工作臂的组成与结构特点
工作臂包括上臂、下臂、基本臂及飞臂。整个工作臂的升降工作主要是通过液压缸的伸缩来完成的,上臂、下臂和基本臂在液压缸的协助下完成工作臂的大幅升降工作,飞臂通过飞臂液压缸完成飞臂的摆动,在一定程度上可以实现工作平台的小幅升降,适合在作业车微调高度时使用,将工作人员或物资更精准地送达指定地点[6]。
折臂式高空作业车三维模型如图1所示,其工作过程如下:下拉杆、上臂、上拉杆和下臂通过折叠臂变幅油缸的伸缩实现对整个折叠臂的升降;飞臂通过飞臂变幅油缸的伸缩实现飞臂的翻转及工作平台的升降。
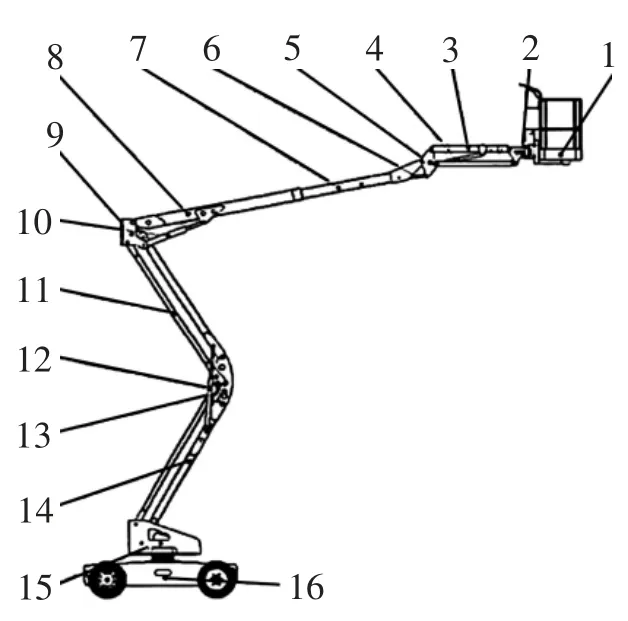
图1 工作臂三维模型
2 有限元模型建立
2.1 确定建模方案
本文中,折臂式高空作业车的结构由于实际模型太过复杂,因此只对其主要结构(下臂、上臂、基本臂、飞臂和工作平 台) 使 用Solid Works 软件进行建模[7]。在建模过程中将旋转平台与基座视为一个整体,将上臂、下臂、基本臂、飞臂以及工作平台视为独立存在的部件,同时对各臂间的联接点以及销轴之间解除约束,以便于接下来的网格划分。
在进行有限元分析时,考虑到小孔、倒角和圆角等细小结构在分析过程中会增加计算机的工作量,同时其本身存在与否对工作臂整体结构的性能影响十分微小,因此在建模过程中对其进行忽略。这对提高计算效率和保证计算的精准性有重大意义。在以上工作完成后,将所建模型的文件格式转为step.格式,将其导入到ANSYS中,建立有限元模型。
2.2 网格划分
网格处理时要充分考虑被分析主体的结构、受力方式、连接方式等因素[7]。工作臂主要是由钢板焊接而成,因此材料选用默认的结构钢,其密度为7850 kg/m3,弹性模量为2×105MPa,泊松比取0.3。
为提高分析结果的精准性,本文采用的自动网格划分,单元结构设置为0.005 m。鉴于四面体网格比六面体网格的复杂结构适应性更高,在划分四面体网格时计算机的工作量也较低,同时划分网格的类型对于最终分析结果的影响也很小,所以本模型中所使用的网格划分为四面体网格。最终生成的网格单元数为51 584,节点数为86 368,采用正交质量评估,得到网格的平均质量为0.699 56,网格质量符合要求。
2.3 约束与载荷处理
折臂式高空作业车在工作时主要受到的载荷有在工作平台上物体的重力、工作平台及工作臂自身的重力、工作臂侧面所受到的载荷和其受到的风载等。在工作臂处于最大伸展状态时,风载主要作用在工作臂的侧边,会引起工作臂的振动,使工作臂工作时的稳定性受到影响,从而产生晃动。因此本研究对工作臂分别施加10 m高的五级风风载和15 m高的五级风风载,五级风风压在区间40~71.6 Pa。因此在本研究中在水平方向上施加其最大值71.6 Pa的压力,并且在工作臂的下臂的下端面施加约束的条件下进行模态和频响分析。
3 模态分析
3.1 模态分析理论
臂架的动力特性方程为
式中:M为质量矩阵;K为刚度矩阵;C为阻尼矩阵。
由于本文所选用的分析臂架结构动力特性的方法为模态分析,所以应使F(t)=0、C=0,将初始条件代入式(1)得到:
工作臂的振动为简谐振动,因此位移x的计算式为
将式(3)代入式(2)中,得到:
解出式(4),其结果ωi就是自然角频率[8]。其自然频率f的计算式为:f=ωi/(2π)。自然频率f对应的振型就是ωi对应的向量x。
3.2 模态分析结果
对已经进行网格化和约束、载荷处理后的工作臂模型,在工作平台上作用有竖直载荷的条件下分析其12阶模态,最终得到的各阶模态对应的频率和最大偏移量如表1~表3所示,选取主要模态所对应的振型图如图2~图5所示。由分析所得数据可知,随着模态阶数的增长,工作臂的固有频率也随之增加。从4阶模态开始,固有频率的增加速度加快,增长速度近似为线性增长,在10阶模态之后增长速度大幅提高。最大偏移量在前4阶模态稳定在0.3左右,在第5阶模态时达到峰值0.625 56 m,后在第7阶模态达到0.527 27 m,其余模态稳定在到0.4 m左右基本保持稳定。

表1 各阶模态分析(一)

表2 各阶模态分析(二)

表3 各阶模态分析(三)
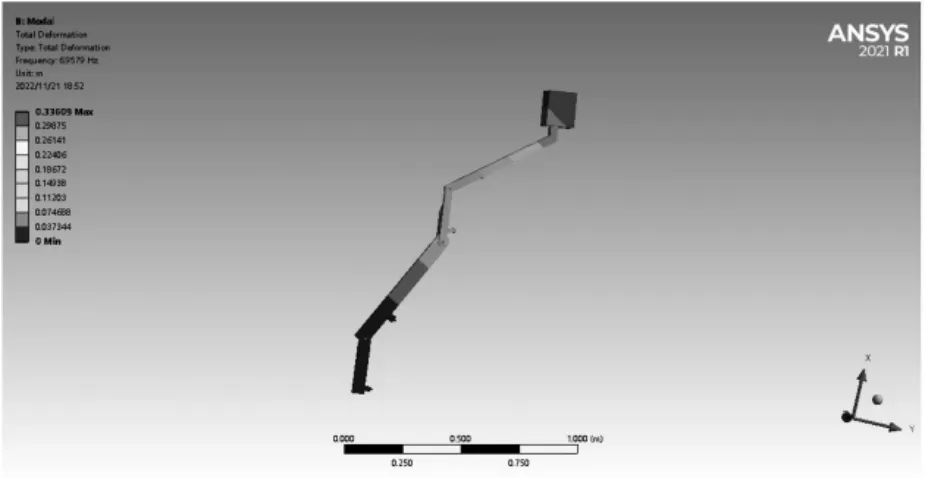
图2 1阶模态

图3 5阶模态

图4 9阶模态

图5 12阶模态
4 谐响应分析
4.1 谐响应分析理论
臂架在激振力为简谐载荷的情况下,其简谐响应的运动方程为
式中:θ为激振力频率;F为简谐载荷的幅值向量。
节点位移响应的计算式为
式中:ψ为位移响应滞后激励载荷的相位角度;A为位移幅值向量。
再将式(6)代入式(5)中,得到式(7)为节点频率和位移的关系:
4.2 谐响应分析结果
根据上文所做的模态分析,可以得出工作臂的固有频率在0~586.69 Hz之间,因此在谐响应分析中所选区的分析范围为0~600 Hz,在这区间内平均选取10个点进行分析,分别对给下臂、上臂、基本臂施加71.6 Pa的风载和给下臂、上臂、基本臂和飞臂施加71.6 Pa的风载两种情况下的谐响应,边界约束与模态分析一致。对工作臂整体进行求解,提取其在两种工况下x、y、z方向上的变形频谱图,提取结果如图6、图7所示[9]。

图6 10 m风载工作臂变形响应图

图7 15 m风载工作臂变形响应图
对图6和图7进行分析可以发现,工作臂变形的峰值在180 Hz附近,与上文模态分析中第7阶模态的固有频率190.97 Hz相近,这说明本文通过模态及谐响应分析工作臂的方法是正确的。因此该折臂式高空作业车在使用时应避免在180 Hz附近的工况下工作,避免发生共振现象。
5 结论
本文以某折臂式高空作业车为设计目标,以折臂在不同高度风载作用下的模态分析和谐响应分析结果为主要分析目标,对其动力特性进行分析,得出以下结论:
1)在对臂架整体的应变云图和应力云图进行分析后发现,在工作臂联接点处容易出现应力集中现象。可通过增加工作臂各部件在联接点处的厚度,或更换使用材料以增加工作臂的强度和刚度。
2)谐响应分析中,在风载的作用下,共振频率主要出现在工作臂整体的固有频率附近,该现象表明仿真结果是合理的。变形响应图表明臂架的最大变形幅值出现在第7阶的固有频率附近,因此在实际使用中,应避免在其固有频率180 Hz以及更高频率的环境下工作,防止臂架出现的共振现象威胁工作设备及工作人员的安全。