水陆两栖仿生海龟机器人设计与分析
2024-04-22丁钰骐耿兴华周思衡王野舟石孟施凯祥
丁钰骐,耿兴华,周思衡,王野舟,石孟,施凯祥
(大连理工大学 机械工程学院,辽宁 大连 116023)
0 引言
随着机械、电子、计算机和人工智能等学科的发展,机器人技术已从制造业发展至诸如建筑、救援、军事和医疗等非制造业,但是目前大多机器人受工作环境限制较大,例如水下机器人大多不具备陆上行进功能[1],导致使用该类机器人时需将其运送至指定水域后进行作业,完成作业后也需设备对其进行打捞。为了解决上述问题,学者们参考多种动物的运动方式,设计了水陆两栖仿生机器人。蒋波等[2]参考蛇的运动原理设计了一台水陆两栖蛇形救援机器人,利用蛇的蠕动方式,实现水陆行进功能,具有较高的灵活性。因两栖机器人还需要应对斜坡等地形,相比于蠕动行进,采用腿式行进具有更高的稳定性。毛润泽等[3]将海豚的水中游动方式与蜥蜴的陆地行走方式相结合,设计了一台水陆两栖新型仿生无人遥控潜水器,但鱼尾摆动的运动方式载体稳定性较差,影响其水下作业性能。为此,有学者采用稳定性更高、更易于控制的喷射推进方式,王宇等[4]结合六足昆虫的生理特性与乌贼的喷射推进方式设计了一台水陆两栖六足机器人,实现水下多姿态稳定控制。但水下喷射推进方式又限制了仿生机器人的起动、加速性能和运动灵活性。
水陆两栖仿生机器人的运动机构、推进方式、水陆形态转换方式等因素都会影响两栖功能实现效果[5]。由于海龟兼具水下游动与陆上行进能力,而其水下行进方式——扑翼推进运动又具有显著优越性:其融合了鸟类飞行和鱼类游动两种运动特性,但又区别于昆虫飞行的高频气动特性和鱼尾摆动的单驱动特性[6],尽管此类扑翼动物体形较大,但具有爆发力强、机动性高、稳定性好等特点[7]。因此,面对上述挑战,针对仿生机器人对水陆工作环境的适应性问题,本文通过对海龟扑翼运动特点和水陆运动转换方式的分析,基于仿生学方法,设计了一台水陆两栖仿生海龟机器人;分析仿生机器人在扑翼运动过程中水翼转角的变化特性;构建水翼外板水下受力模型,针对水下扑翼运动中关键零件的受力情况,进行流固耦合力学仿真分析和优化;并通过样机试验验证所设计的水陆两栖仿生海龟机器人构建的合理性。
1 水陆两栖仿生海龟机器人方案设计
1.1 海龟两栖运动分析
海龟水下行进时,主要由前水翼扑翼运动提供动力。扑翼运动可分为两阶段:1)水翼垂直于前进方向并快速向后划水,提供前进动力,如图1(a)所示;2)水翼平行于前进方向并缓慢向前划水,流体阻力较小,如图1(b)所示。
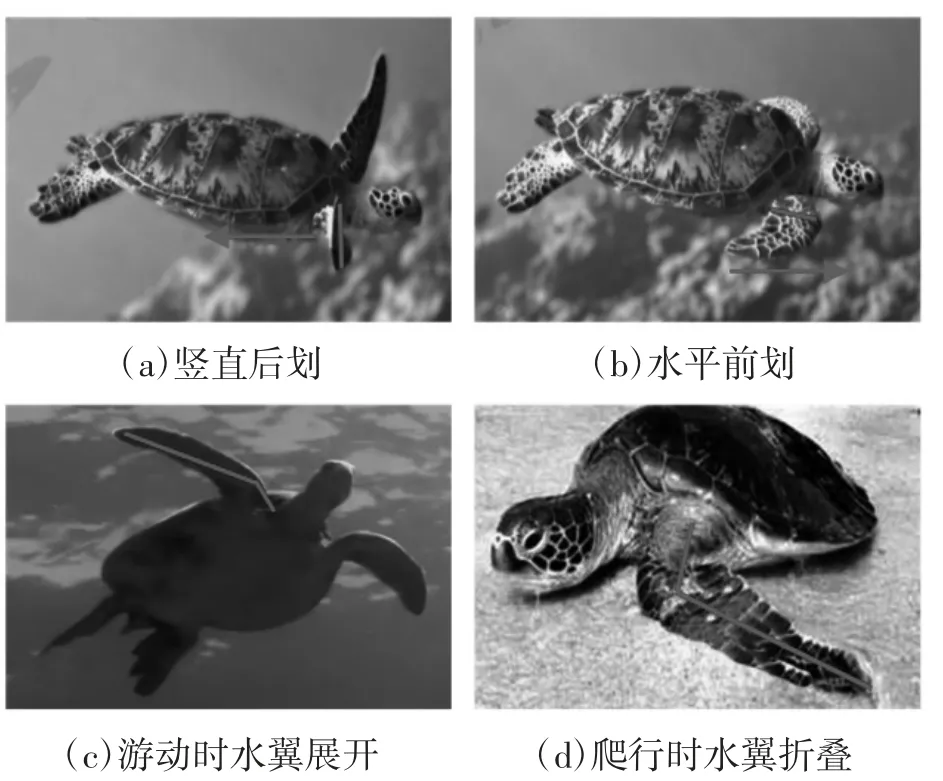
图1 水翼形态变化
海龟上岸爬行时,水翼的展开状态(如图1(c))转换为折叠状态(如图1(d)),缩短水翼与地面接触点和身体重心的距离,便于陆上爬行[8]。
1.2 水陆两栖仿生海龟机器人总体方案设计
该仿生机器人的仿生重点是前水翼扑翼运动和前水翼水陆形态转换方式。同时,该仿生机器人还具有转向和沉浮功能。真实海龟的转向通过前水翼不对称运动实现[9],考虑到仿生机器人两水翼独立运动时,机构稳定性难以保证,因此合并了两套水翼驱动机构,使两水翼同步运动,保证了机构稳定性,通过后腿翻转机构实现仿生机器人的转向。真实海龟的沉浮运动通过改变水翼攻角实现,为简化前水翼机构,采用重心调节机构改变仿生机器人倾角,进而改变前水翼攻角,实现沉浮运动。
根据上述分析,设计了水陆两栖仿生海龟机器人(如图2)。该仿生机器人运动机构包括驱动水翼进行扑翼运动的扑翼传动机构、可进行水陆姿态切换的可变形自锁水翼机构、实现转向的后腿机构和调节海龟重心以实现沉浮的重心调节机构。

图2 两栖仿生海龟机器人
2 机械结构设计
2.1 扑翼传动机构
扑翼传动机构由中央平面四连杆机构和两侧SRRR空间连杆机构组成,将电动机输出轴的匀速转动转换为扑翼运动,具体结构如图3所示。
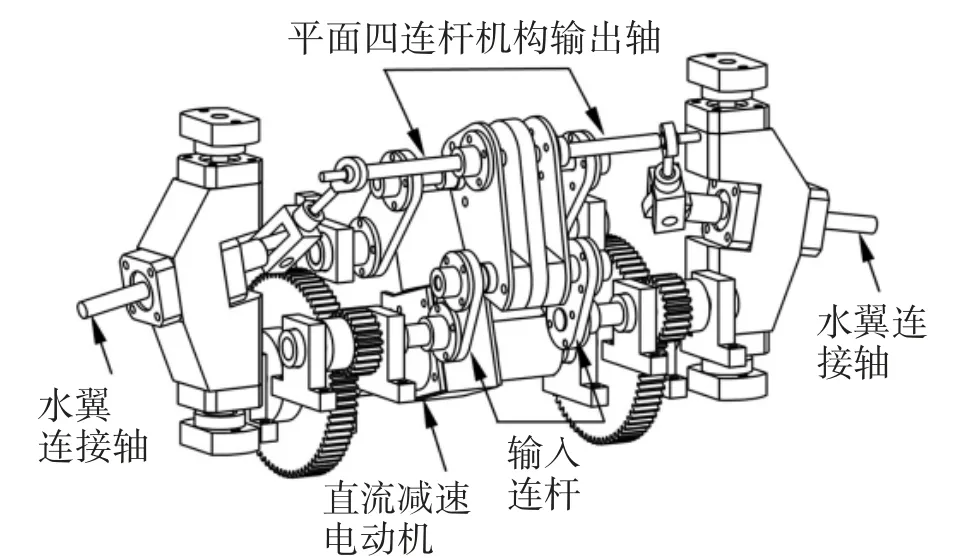
图3 扑翼传动机构结构
平面四连杆机构将输入连杆的匀速转动转换为输出轴具有急回运动特性的类椭圆运动。该机构由多个连杆零件构成,为了提高强度和稳定性,连杆零件均为双层结构,每个转动副由两个轴承确保稳定性。为了使该机构左右受力对称,以保证水翼运行平稳,选用双轴伸直流减速电动机,通过左右两组齿轮将电动机输出转矩传递至输入连杆的左右两侧。SRRR空间连杆机构将平面四连杆机构输出轴的类椭圆运动进一步转化,使水翼向后划水时速度达到最大值,且水翼平面与海龟前进方向垂直,最大化水翼推力。
2.2 可变形自锁水翼机构
该机构由平面五连杆机构和自锁弹簧组成,水翼分为水翼肩板、水翼外板和水翼骨架,水翼外板由水翼骨架固定。仿生机器人水下行进时,水翼处于游动展开状态,如图4(a)所示,前进推力主要由水翼外板提供。海龟上岸后的首个扑翼周期中,当水翼末端运行至最低点时,水翼外侧的A点触地,产生地面支持力,机构克服自锁弹簧回复力开始变形,当变形通过自锁临界点后,机构转换至爬行折叠状态[10],如图4(b)所示。变形过程中,水翼外板向上旋转离地,水翼肩板向下旋转至前端触地,爬行时提供摩擦力使海龟前进。自锁弹簧可保证水翼稳定地自锁于游动或爬行状态,从游动状态切换至爬行状态时,只需保证水翼外板下降触地后,继续下降一段较短的距离,使连杆机构运动经过自锁临界点,即可切换至爬行折叠状态。
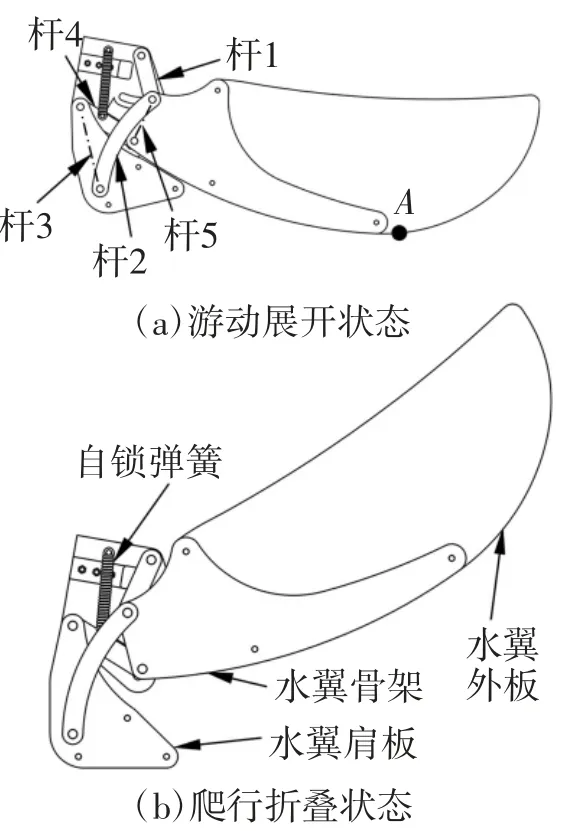
图4 可变形自锁水翼机构结构
2.3 后腿机构
后腿机构由平行四边形机构和左右两个RSSR空间连杆机构[11]组成,具体结构如图5所示。平行四边形机构首先将后腿舵机输出轴的转动传递至左、右腿的空间连杆机构主动连杆,通过空间连杆机构带动左、右腿翻转,当空间连杆机构主动杆转至左(右)极限位置时,上方连杆向下转至最低处,后腿向左(右)摆至最大角度,且接近竖直状态,使海龟尾部获得横向冲量,实现转向。海龟直行时,后腿处于中间位置,且近似平行于水平面,不产生横向冲量。该机构与传统船舵系统相比,后腿动作更接近真实海龟。
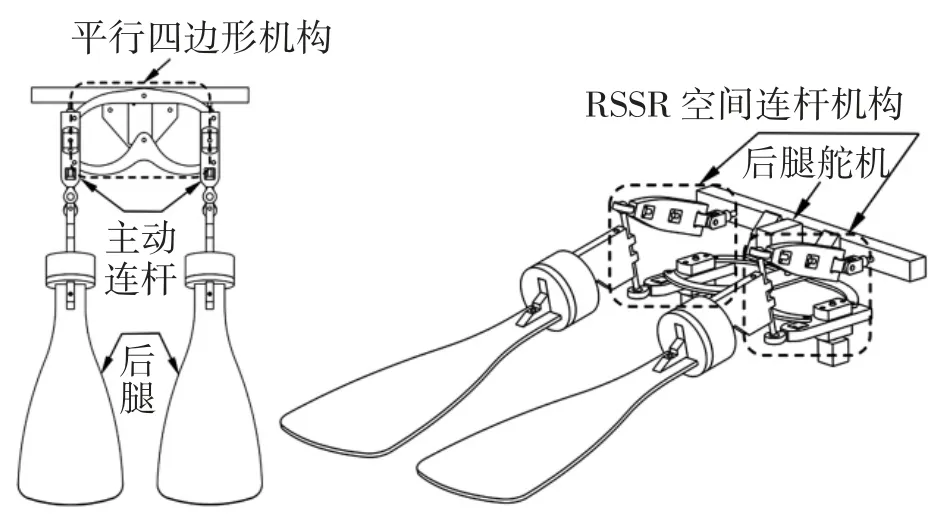
图5 后腿机构结构
2.4 重心调节机构
重心调节机构由步进电动机、同步轮与同步带、导轨与滑块和移动配重等组成,具体结构如图6所示。步进电动机驱动同步轮,通过同步带带动移动配重在导轨上前后移动,改变仿生机器人的重心与浮心相对位置关系,从而改变其水下俯仰角[12],水翼攻角随之改变。同时保证仿生机器人所受浮力与重力相等,在静水中处于悬浮状态,即可通过水翼攻角的变化实现仿生机器人的上浮或下沉。
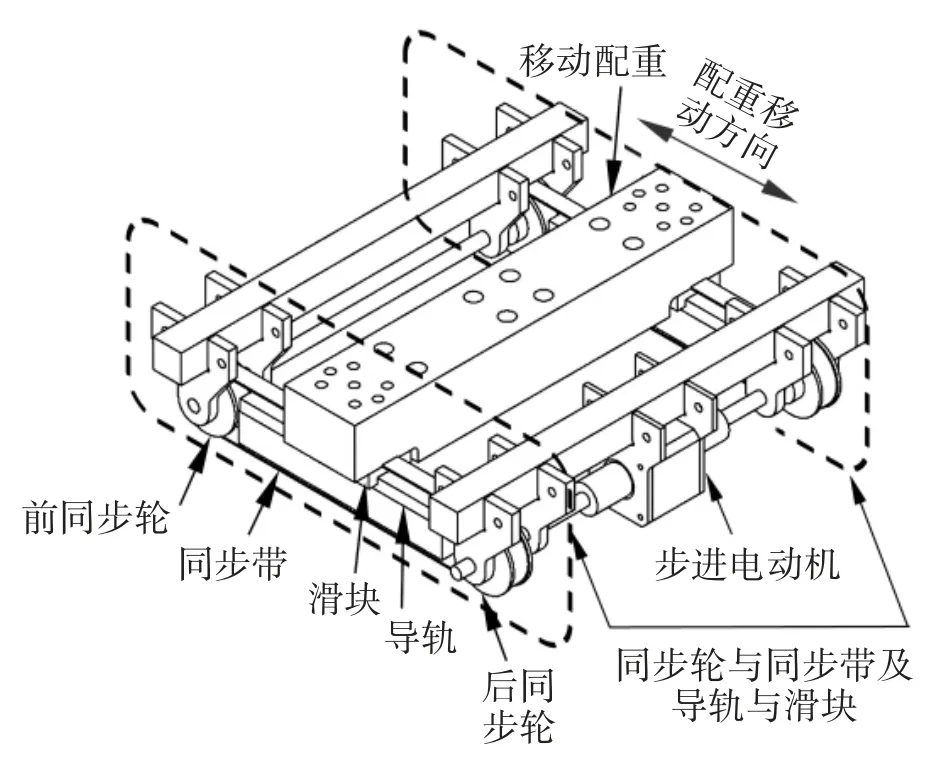
图6 重心调节机构结构
3 运动特性及力学分析
3.1 水翼传动机构运动仿真
使用Inventor软件对水翼传动机构进行运动仿真,以分析其运动特性。分析图7(a)和图7(c)平面四连杆机构输出轴的轨迹和速度曲线,可看出平面四连杆机构输出轴运动至A点时,速度达到最大值,此时水翼向后划水,获得最大冲量推动海龟前进。分析图7(b)和图7(d)水翼末端和平面四连杆机构的轨迹和速度对比曲线,可看出SRRR空间连杆机构将平面四连杆机构输出的类椭圆运动转化为了扑翼运动,并使运动速度进一步提高,验证了该机构可实现扑翼运动。
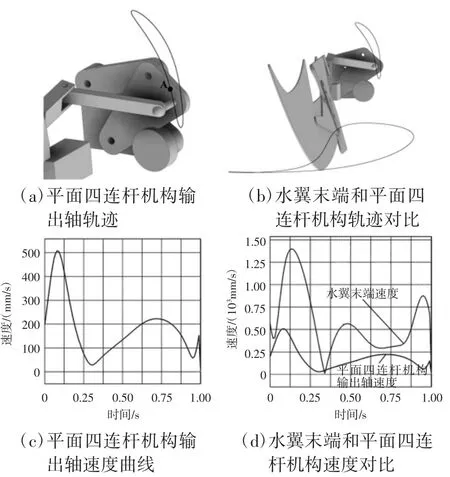
图7 水翼末端轨迹与速度传动过程对比图
3.2 水翼转角计算与分析
扑翼运动是实现水下行进的关键运动,为此对水翼转角进行计算与分析。如图8所示,水翼进行扑翼运动时有两个自由度:一是绕轴1的公转运动,公转转角θ3为轴2在水平面上的投影与海龟前进方向的夹角;二是绕轴2的自转运动,自转转角β为水翼平面与轴2和海龟前进方向确定平面的夹角。因此水翼运动可由θ3和β关于输入连杆转角α的函数来描述。
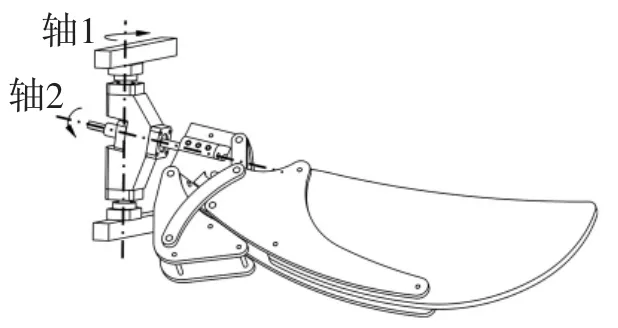
图8 水翼自由度示意图
首先通过平面四连杆机构的几何关系计算其与SRRR空间连杆机构连接点P的位置坐标。如图9所示,设AB、AC、CD、BD、PC、PD长度分别为L01、L1、L2、L3、L4、L5,三角形 板 顶 角γ1、γ2,AB、CD、BD与水平面夹角分 别 为γ0、θ1、θ2。由封闭矢量法[13]得方程组:
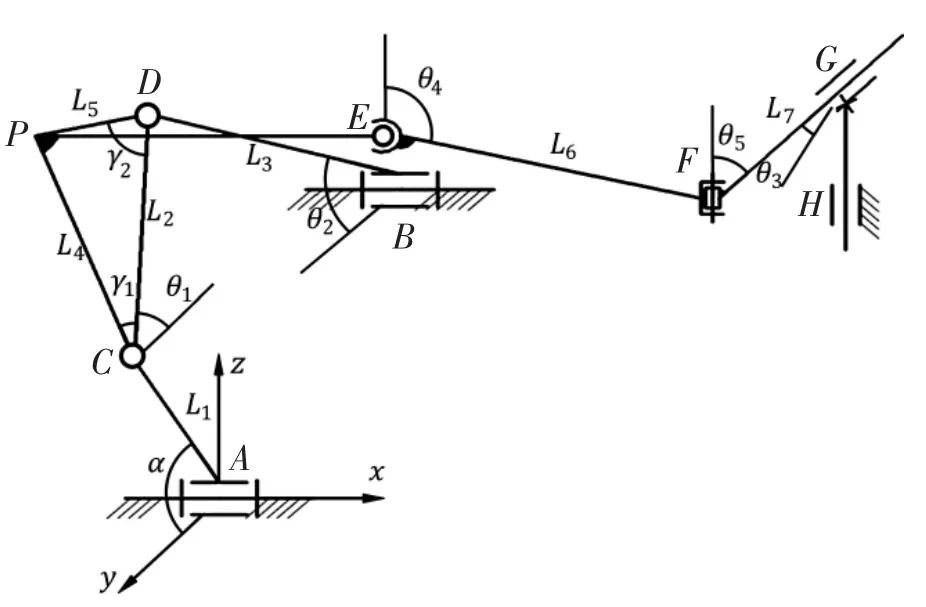
图9 扑翼传动机构简图
可解得θ1、θ2。
求出P点坐标为:
式中:
通过SRRR 空间连杆机构几何关系计算θ3、β。设EF、FG长度分别为L6、L7,轴2与水平面夹角为γ3,轴1与轴2交点为(L04,L02,-L03),EF、FG与垂直于仿生机器人前进方向的平面所成夹角分别为θ4、θ5。由封闭矢量法得方程组:
可解出θ3、θ4、θ5,代入得L6和L7表达式:
由于EF、FG由转动副相连,轴2与L6和L7所确定的平面同步转动,因此水翼平面始终与该平面呈恒定角度,设为水翼安装角度γ4。得水翼自转角度:
代入实际机构参数,使用MATLAB 进行方程求解和函数计算后,分别绘制出水翼公转角度θ3和自转角度β关于输入连杆AC转角α的函数图像,如图10(a)和图10(b)。
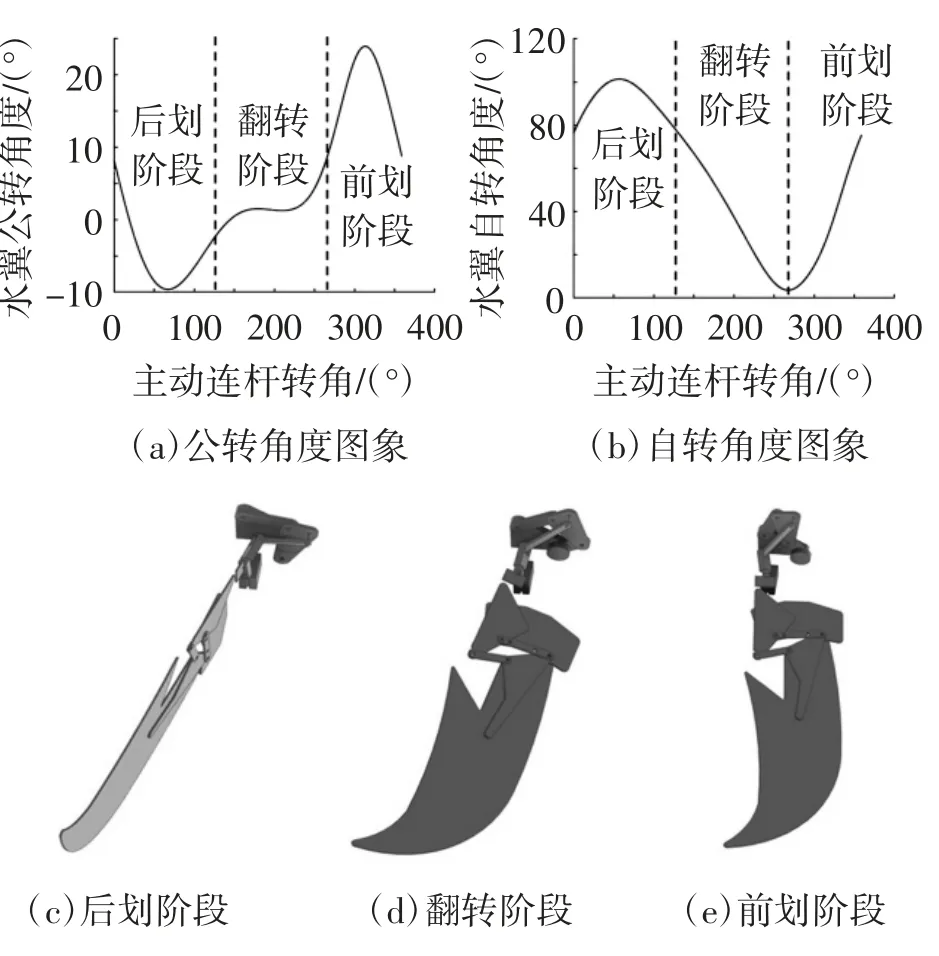
图10 水翼公转自转角度曲线分析
分析水翼公转与自转角度函数图像,可得水翼运动分为3个阶段:第一阶段如图10(c)所示,公转角度为负,自转角度较大,在80°到100°之间,水翼向后划水且水翼平面与前进方向大致垂直;第二阶段如图10(d)所示,公转角度约保持在0°,主要进行自转角度变化,使水翼平面稳定翻转至与前进方向平行;第三阶段如图10(e)所示,公转角度为正,自转角度约为0°,使水翼向前划水时流体阻力较小。因此该机构能够模拟真实海龟的扑翼推进运动。
3.3 电动机转矩计算与分析
电动机所需提供的转矩由水翼划水时水的反作用力决定,为便于研究,将水的作用力等效为作用于水翼平面形心的集中载荷,设水翼形心至轴1的距离为L8,至轴2距离为Δl,水翼面积为S。由于水翼同时参与公转和自转运动,而只有垂直于水翼平面的速度分量对流体起推动作用。为此推导出水翼垂直于该平面方向的速度分量和水翼推进力公式如下:
设平面四连杆机构中P点受L3所提供的约束力F=Fx+Fy。对机构进行受力分析,得
对平面四连杆机构中的三角形板进行受力分析,设齿轮转动比为i,得电动机需提供转矩为
代入实际参数,使用MATLAB软件计算后,绘制电动机需提供转矩M关于输入连杆转角α的图像如图11所示,电动机需提供最大转矩为0.022 N·m。5840-3650直流无刷减速电动机在所需转速下额定转矩为3.92 N·m,可安全驱动扑翼运动。
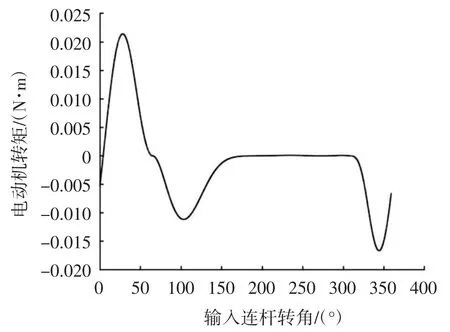
图11 电动机转矩曲线
3.4 配重安装位置计算与分析
为了有效实现上浮和下沉功能,需要合理配置仿生机器人内部的固定配重,使其重心位置合理。规定移动配重最大移动距离为250 mm;仿生机器人所受浮力一定,因此悬浮条件下总质量一定;且移动配重移动至极限位置时,规定俯仰角为45°。选择3个主要设计参数:固定配重质量、重心浮心间距和移动配重质量。进行计算和绘图分析,以确定固定配重安装位置。由重心计算公式可得固定配重及其位置坐标关系式为
其中,规定x轴方向为仿生机器人前进方向,y轴方向为仿生机器人高度方向,坐标原点为浮心位置,pw为固定配重质量,px、py为固定配重重心坐标,aw为总质量,kw为框架质量,kx、ky为框架重心坐标,rx、ry为移动配重重心坐标,dx为移动配重移动距离。
整体重心浮心间距与固定配重位置坐标关系为
其中,ay为平衡时的整体重心的y坐标。
移动配重与固定配重质量关系为
代入实际参数使用MATLAB软件计算后,绘制图12所示的重心模拟分析图。
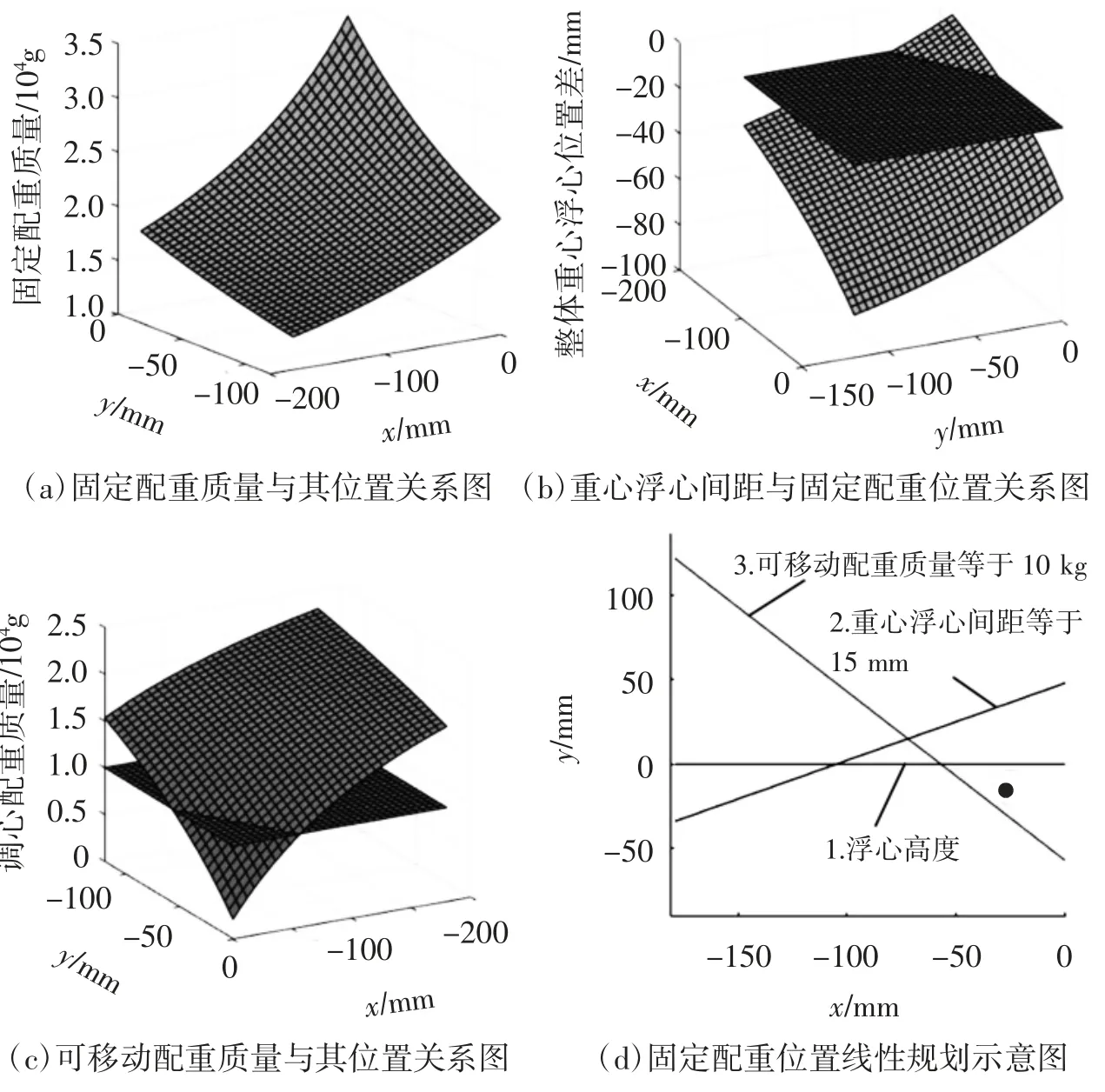
图12 重心模拟分析图
如图12(a)所示,固定配重离浮心越远,所需质量越小。如图12(b)中曲面所示,固定配重在y方向离浮心越远,在x方向离浮心越近,重心浮心间距越小,仿生机器人越不稳定,受扰动易倾覆。规定重心浮心间距大于15 mm,即图中深色平面下方区域。如图12(c)中的曲面所示,为移动配重质量,规定其小于10 kg,即图中深色平面下方区域。
根据上述两个约束条件,即图12(b)和图12(c)中的平面曲面交线,并且固定配重需安装于浮心下方,进行线性规划分析,如图12(d)所示,固定配重位置坐标需位于线1下方,线2下方,线3上方,即图中圆点处三角形区域。最终选择固定配重位置为(-20 mm,-15 mm)。
4 关键零部件力学分析及优化
4.1 水翼外板形变与应变情况动力学仿真
使用有限元分析平台ANSYS与计算流体力学分析软件Fluent,对水陆两栖仿生海龟机器人铝合金材质水翼外板零件进行流固耦合力学分析[14]。
参考海龟水翼运动的典型参数,取水翼拍动角速度为2.09 rad/s[15],仿真计算时步为0.01 s,经过仿真计算得到水翼外板形变云图与应力分布云图,如图13所示。

图13 水翼外板形变云图和应力分布云图
图13(a)中,水翼外板形变从翼根至翼尖逐渐增大,翼尖处形变最大值为17.672 mm。图13(b)中,水翼外板应力从翼根至翼尖逐渐减小,翼根处应力最大值为53.965 MPa,小于铝合金屈服强度。但是经计算,水翼外板质量为1.405 kg,质量较大,运动灵活性较差。
4.2 水翼外板材质与结构优化
为了在保证强度的条件下减小水翼外板质量,在原一体式铝合金水翼外板方案的基础上提出了另两种改进方案:一体式亚克力水翼外板和分体式铝合金骨架水翼外板。3种方案的水翼外板质量如表1所示。

表1 3种水翼外板方案质量kg
方案二为一体式亚克力水翼外板,此方案水翼外板质量较轻,但是由应力云图(如图14(b))可见,翼根处最大应力为96.009 MPa,大于亚克力材料屈服强度,方案不可行。方案三将水翼外板分为骨架部分和翼面部分,骨架为铝合金材质,翼面为亚克力材质。图14(c)中,亚克力翼面由于受到刚性骨架的约束,翼尖处形变量为19.676 mm,与方案二翼尖处形变量99.582 mm相比明显减小。图14(d)中,由于骨架部分刚度较大,水翼外板应力主要集中于铝合金骨架部分,亚克力翼面部分应力最大值为42.239 MPa,比方案二明显减小,小于亚克力材料屈服强度。并且刚性骨架部分应力分布较为合理,骨架根部由于面积较大,应力相对较小,骨架末端由于宽度减小,应力增大,最大值为238.54 MPa,小于铝合金材料屈服强度。同时方案三水翼外板质量比方案一显著下降,因此选择方案三为水翼外板方案。
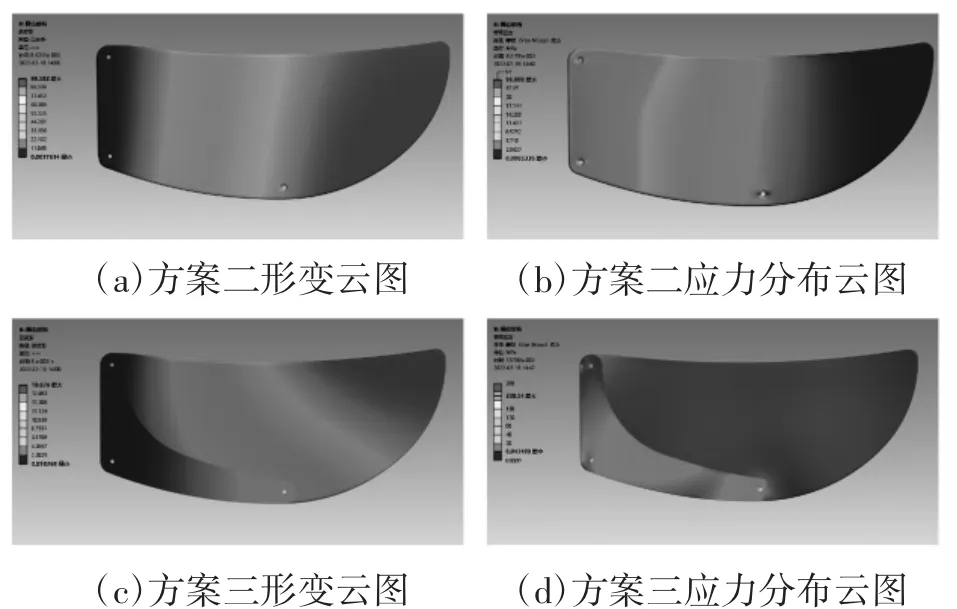
图14 水翼外板优化方案形变云图和应力分布云图
5 样机测试与问题改进
经过仿真分析和理论计算,对部分机构参数进行优化后,研制出了水陆两栖仿生海龟机器人样机(如图15),并对样机行了相关试验测试,如图16所示,表2为试验测得样机主要技术参数。
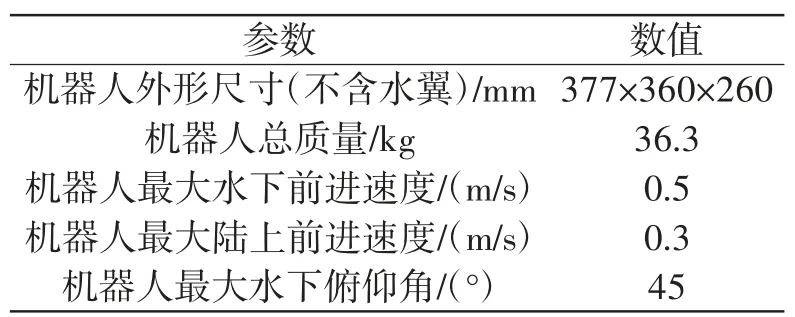
表2 仿生机器人技术参数

图15 仿生机器人样机
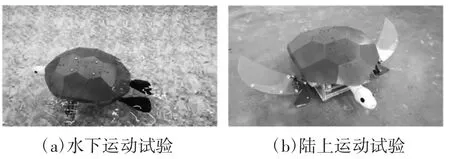
图16 仿生机器人水下与陆上运动试验
仿生机器人主要功能基本实现:可以实现水下扑翼运动,平稳前进、转向、沉浮运动,且达到预设水下最大俯仰角45°;可以实现水翼水陆形态切换,并在地面上平稳前进。
同时,在试验过程中,对发现的问题进行了分析与解决:
1)水下柔性密封胶皮形变情况不一。
由于样机多处密封胶皮所处水下深度不一,导致不同胶皮内外压差不同,部分外凸,部分内凹,且胶皮面积较大,变形导致样机整体形状变化,浮心位置改变,破坏悬浮稳定性。通过在胶皮外侧增加限位挡板,防止胶皮过度外凸。
2)陆上行进时,水翼下端复位后易与地面接触产生阻力。
由于样机通过水翼下端与地面间的摩擦力实现陆上行进,水翼下端复位后会与地面接触,产生阻力并阻碍前进。通过在水翼下端增加单向合页结构,实现水翼后摆时提供推进力,前摆时不产生阻力。
6 结论
针对传统机器人在水陆工作环境下的运动适应性问题,基于对海龟扑翼运动特点和两栖运动实现方式的分析,设计制造了一台水陆两栖仿生海龟机器人。
主要设计内容为:完成可变形自锁水翼机构设计,实现仿生水翼的水陆形态自动转换,以适应水陆不同环境下的运动需求;通过对机构模型的合理简化,对水翼转角和电动机所需提供最大转矩进行了计算与分析,验证了该仿生机器人能够可靠实现扑翼运动,从而实现水下与陆上行进功能;通过流固耦合力学仿真方法分析了水翼外板形变量和应力分布情况,并对其材质和结构进行了优化。最后对试验样机进行了性能测试和分析,测试和分析结果表明:研制的水陆两栖仿生海龟机器人能实现主要功能;对于水下柔性密封胶皮形变情况不一以及地面行进时水翼下端复位后易与地面接触并产生阻力等问题,提出了解决方案。
未来研究工作可以关注以下三点:1)优化仿生机器人主体与水翼的形状,减小流体阻力并最大化地提高水下推进效率;2)对仿生机器人进行轻量化设计,最大化地提高陆上行进效率;3)设计可重复使用的密封机构,便于调试工作。