协方差矩阵分解的CNN协作频谱感知
2024-04-22师浩东包建荣
师浩东,姜 斌,包建荣,刘 超
(杭州电子科技大学通信工程学院,浙江 杭州 310018)
0 引 言
随着互联网时代的到来,万物互联的时代将带来几何级增长的数据,现阶段可使用的频谱资源已不能满足用户的日益需求,所以除了寻找更高通信频段,采用动态频谱共享模式以及灵活的频谱资源配置,将会是未来通信技术发展的一个重要方向。认知无线电(Cognitive Radio, CR)技术作为缓解频谱资源稀缺的关键技术之一,其主要目的是让无线通信系统拥有从周围环境学习的能力,可以实时互换信息,检测并使用可用的空闲频谱。安全可靠的频谱感知是CR系统正常工作的前提,是频谱共享得以实现的重要环节。单节点频谱感知主要包括了能量检测(Energy Detection, ED)、匹配滤波器(Matched Filter, MF)检测、循环平稳特征(Cyclostationary Feature, CF)检测等[1]。其中,ED复杂度较低,但在低信噪比下无法区分主用户信号和噪声[2]。MF检测时间短、精度高,但对主用户先验信息要求较高[3]。CF在低信噪比下检测率高,但复杂度高,延迟较大[4]。针对噪声带来的影响,文献[5]用样本特征之差来减少噪声波动带来的影响,文献[6]提出了基于进化博弈论的协作频谱方法,降低了噪声影响,并提高了吞吐量,但其检测阈值及性能都不稳定。文献[7]采用人工蜂群优化,完成了噪声不确定下的协作频谱感知,但其协作频谱感知中检测门限不易确定。文献[8]将支持向量机(Support Vector Machine, SVM)用于频谱感知方法,通过对接收信号预处理后组成的特征向量,最终获得较好分类效果。但其训练时间长,特征参数提取不足。文献[9]在信号分类引入了卷积神经网络(Convolutional Neural Network, CNN),取得了较高识别率。但其未构造特征参数,致使频谱检测效果还有改进余地。
故针对上述检测阈值不稳定、低信噪比下识别率低等问题,采用Cholesky分解及统计量构造、CNN分类等方法,提出了协方差矩阵分解的CNN协作频谱感知方案,具有特征参数提取充分、检测时间短、低信噪比下检测精度高等优势。
1 CNN协方差矩阵分解的协作频谱感知
1.1 频谱感知系统模型
认知无线系统常包含1个主用户(primary user, PU),M个次用户(secondary user, SU)。在频谱检测中,认知基站(cognitive base station, CBS)先对PU检测,判断PU状况并确定空闲频谱。然后,发送接收机(PU-receiver,PU-R)状态,确定空闲频谱。当PU-R在检测区域时,继续检测。否则,释放之前频谱后,SU才可利用。若PU访问SU使用的频段时,则SU退出。并检测其它空闲频段。
当PU通信未被干扰时,第i个次用户SUi对PU信号检测,接收信号采用二元假设模型表示为:
(1)
其中,ri(k)表示第i个次用户在时刻k所接收的连续时间序列,hi(k)为表示在时刻k第i个传输信道损耗系数;s(k)表示PU的信号,ni(k)表示均值为0、方差为σ2的加性高斯白噪声;H0表示不存在PU信号,H1表示存在PU信号。
1.2 数据预处理
设SU有L根天线,次用户在k时刻接收到L个连续时间序列,接收到的信号通过采样后得到L×N维矩阵Rk,然后求出其协方差矩阵为N×N维的矩阵SN。然后,将其通过Cholesky法分解,得
SN=XXT,其中X为下三角矩阵,表达式为:
(2)
其中,N为采样点数,Xi,j≥0,i与j都为整数,计算的表达式为:
(3)
其中,Si,j代表矩阵SN的第i行,第j列元素。
在H0条件下,矩阵X对角元素基本相同,其它元素趋近于0。但在H1条件下,矩阵X对角线元素不同,其它元素值相对较大。故将矩阵X全部元素之和与斜对角线元素之和的比值为统计量为:
(4)
其中,Tk表示每个次用户产生的第k个统计量,每个次用户产生的特征向量为:Tk=[T1T2…Tk]T,M个次用户产生的特征向量构成的特征矩阵为:
(5)
其中,TMk表示第M个次用户产生的第k个统计量;将TMk归一化后作为CNN频谱感知的数据集。
1.3 CNN频谱感知
本文CNN采用3个卷积层、2个池化层、1个全连接层,如下图所示。
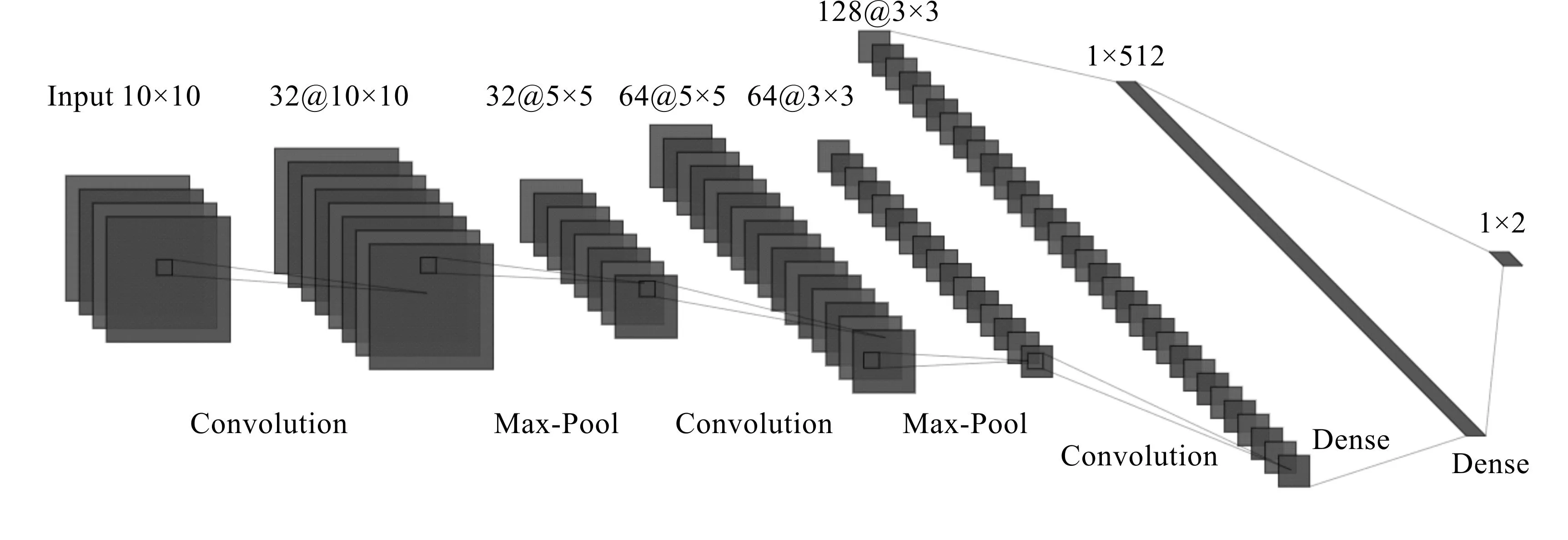
图1 CNN结构图
(6)
其中,w表示权值,b表示偏置值,是CNN反向传播时不断优化的参数,lw,b表示训练数据经过CNN后的映射标签。
在梯度下降优化方面,采用Adam(Adaptive Moment Estimation)优化器算法,主要是通过梯度的一阶矩估计和二阶矩估计来调制每个参数的学习率,更新过程为:
(7)
该算法计算m时有momentum加速下降的属性,计算v时有adagrad阻力的属性,更新参数时把m和v都考虑进去,计算效率高。
1.4 算法流程设计
算法分为数据预处理和CNN频谱感知两部分,流程图及步骤如下:
步骤1:对SU接收信号N次采样,得到L×N维矩阵,求出其协方差矩阵,之后通过Cholesky法分解得到下三角矩阵X;
步骤2:将X的全部元素之和与斜对角线元素之和的比值作为统计量,然后M个次用户产生的统计量组成一个统计矩阵,作为单个训练样本;
步骤3:按照步骤1和步骤2,在不同信噪比下,分别产生H0和H1条件下的样本,分别用“0”和“1”标记后,在不同梯度下降优化算法下,设置不同的epoch和batch,通过CNN训练训练集,选择accuracy最高并且loss最低的优化器,确定系统模型参数,再通过测试集测试得到检测结果。

图2 CNN协方差矩阵分解的协作频谱感知算法流程图
2 算法性能对比与分析
2.1 实验数据准备
本次实验数据集均在Matlab 2018平台上仿真产生,用于训练与测试的CNN框架是基于Python3.8环境下的Tensorflow-2.3.0深度学习框架。主用户信号采用BPSK信号,噪声采用均值为0、方差为1的高斯白噪声,次用户数M固定为10个,天线L为10根,采样点数N为100。
2.2 CNN频谱感知模型训练精度
训练次数epoch设为100,batch设为100个,图3为在不同优化算法下的训练精度。
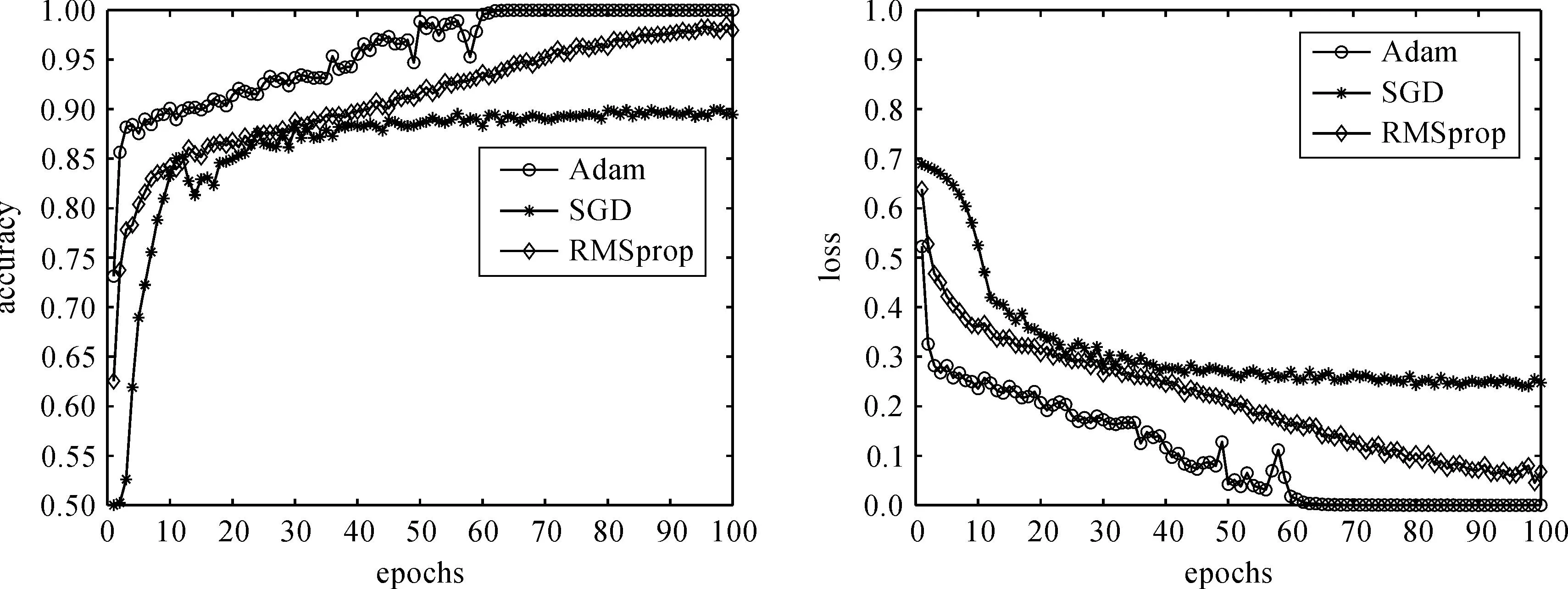
图3 不同优化算法下的训练精度及损失值
由图3得,训练过程中accuracy值整体稳步上升,Adam优化性能最佳,该优化器在训练次数达到60次时,accuracy值稳定在约100%,loss值基本稳定在0左右。原因如下:Adam本质是momentum和RMSprop的结合,经偏置校正后,每次迭代学习率都有确定的范围,使参数较平稳;而且,式(8)中的m和v都得到更新,计算效率高,适合非静态目标和稀疏梯度的问题,为不同参数计算不同自适应学习率,适合大数据集和高维空间,故Adam学习算法优于其它算法。
2.3 算法性能比较及分析
图4左边为6种算法在虚警概率Pfa=0.1时,检测概率Pd对比图,SNR取值范围为:-20 dB~0 dB;右侧是SNR为-13 dB时,6种算法的接收者操作特征(Receiver Operating Characteristic, ROC)曲线图。
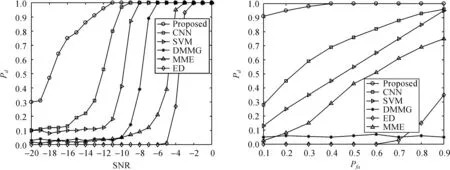
图4 各算法的检测概率及ROC曲线
由图4可得,当SNR为-15 dB时,本算法Pd比传统CNN和SVM各高约60%和69%。其原因如下:SVM是对协方差矩阵的特征值检测,虽然解决了阈值不精确问题,但未充分利用其携带的所有信息。CNN模型在处理高维矩阵方面比SVM更具优势,故CNN检测概率整体高于SVM。其次,与传统CNN相比,所提方案通过式(3)的Cholesky分解和与式(6)的统计量计算,将PU与噪声信号的特征提取出来,增强了PU信号的影响,达到更好的分类效果。
3 结束语
本文主要提出了一种CNN协方差分解的协作频谱感知算法,具有低信噪比下检测精度高、时间短等性能。其优势如下:对信号协方差矩阵Cholesky分解后构建统计量,可降低噪声干扰;对多个次用户统计量融合,提高协作性并减少误差;通过CNN信号分类,自主学习确定决策阈值,可提高其精度。因此,所提方案的检测精度可获得显著提高,适用于5G时代下复杂的多噪声环境。