三杯风速传感器非水平风场测量性能
2024-04-19白赢策刘昕贺晓雷
白赢策 刘昕 贺晓雷
(中国气象局气象探测中心,北京 100081)
引言
三杯风速传感器外形小巧轻便,具有便于组装、性能高效、安全可靠的特点。广泛运用于气象、农业、海洋等领域,保有量巨大,其信号输出值均为电信号,准确度会随时间变化、环境变化而漂移,为保证其测量数据的准确可靠,需定期对其进行计量校准工作。
当前背景下,三杯风速传感器在计量检定条件中的应用场景,主要是依据国标GB/T 33691—2017杯式测风仪测试方法[1]和计量检定规程JJG(气象)004—2011自动气象站风向风速传感器[2]开展工作。通过工装夹具将其安装固定在风洞试验段,使得三杯风速传感器垂直于风洞底面内壁,风杯旋转的平面平行于标准风洞内风场气流的角度。通过记录被测三杯风速传感器的实测风速与标准风洞的实测风速,并用二者相减得到示值误差或通过计算得到测量不确定度[3-4],作为三杯风速传感器检定结果的评判标准。这种计量检定方法在气象行业已十分成熟,普及率很高,用三杯风速传感器的测量性能衡量量值传递的标准情况,具有计量保障的重要意义。
目前对于气象风速已有的研究成果,在标准器测量影响因素的分析研究方面主要体现在:皮托管检测杆直径大小、安装角度对被测量流速的影响[5];皮托管的测风误差分析和GUM评定不确定度的偏差修正等[6]。在风场阻塞实验研究方面主要体现在:通过建立模型对阻塞效应进行实验修正,提出半经验阻力系数修正理论[7-8];利用CFD建模研究阻塞效应修正平均风载荷[9]等。有学者以船舶为载体,采用测量平台设备模拟其运动状态,对现有的风速传感器进行测量数据的动态补偿[10];还有学者基于风洞数据对海岛局部风场特性的拟合,对海岛坡顶高度、坡度和湍流强度等变化进行数值模拟研究[11]。
然而针对于气象计量行业的风速传感器在非水平风场下的测量性能研究仍处于相对空白阶段。在常规实际的气象观测场景下,自然界近地面的风受水平气压梯度力、地转偏向力、摩擦力等影响,在进入三杯风速传感器测量范围内时往往来自于非水平方向。这一普遍存在的问题所造成的计量与观测间的差异,从某种程度上造成了量值传递的断链。为解决这不可避免的差异对实际观测带来的影响,弥补风速计量领域在此方向的缺失,保证测量数据的准确、可靠性,并建立计量环境与观测场景之间的联系[12]是十分必要的。
本文设计了三杯风速传感器在非水平风场内测量性能研究实验,加入了主体由角度编码器构成的自动化转盘系统,运用多种数理统计的方法对实验结果进行分析,提出对三杯风速传感器的示值误差显著影响的变量,总结实现了一套风速量值修正算法,为后续新一代三杯风速传感器的算法设计探索方向,为其作为计量器具的型式评价提供思路,并为后续类似应用场景的研究做出铺垫。
1 技术路线
设计技术路线应在参照自动气象站风向风速传感器检定规程的前提下,贴合实验要求,在合理范围内对细节进行改动[13]。本文技术路线流程如图1所示。

图1 技术路线流程
2 实验设计
2.1 主体设备结构
三杯风速传感器测量风速的本质,是因风杯在风场内气流的带动下旋转,使得在传感器内部的截光盘切割红外光束产生电磁脉冲,最终通过算法将电流信号转化为风速值输出的过程。传感器内部截光盘与风杯所在平面平行,在计量检定条件下也平行于风洞试验段内水平风场的方向。[14]
现设计装置如图2所示[15-17],通过控制倾角调节装置,改变三杯风速传感器在风洞试验段内的倾斜角度θ[18-19](倾角调节装置连杆与初始位置的夹角,左倾为正,右倾为负)。在θ分别为0°、±10°、±20°、±30°、±40°、±45°时设置11组样本,每组选取2 m/s、5 m/s、10 m/s、15 m/s、20 m/s、25 m/s、30 m/s、35 m/s、40 m/s共9个标准风速值作为样本点。记录每一组的倾斜角度θ以及每个样本点的指示风速ν和实测风速ν′。

图2 风洞试验段标准装置及自动化转盘系统示意
当三杯风速传感器处于倾斜状态时如图3所示。

图3 三杯风速传感器倾倒状态下的风速示意
根据式(1)计算实测风速水平方向的分量ν″,并与指示风速值相减得到示值误差Δν如式(2)所示。
ν″=ν′cosθ
(1)
Δν=ν″-ν
(2)
2.2 主要变量来源
2.2.1 指示风速ν的计算
用风洞参数数据采集器和数字压力计采集实测风压值(Pa)、流场温度值(℃)、流场湿度(%)和室内大气压力值(hPa),用数据采集器读取风速传感器的输出值,根据指示风速计算公式,计算出各风速点上的指示风速ν[20]。
首先用皮托管的测量结果计算指示风速。将微压计在各实验点上的读数平均值减去初始零位值,得出实测风压值并计算标准状态下的相当风速值V[21]。
(3)
其中,Pv为指示风压值。
然后根据实验过程中检测到的流场内温度、湿度和大气压力平均值,计算出风速值的空气密度修正系数Kp。
(4)
其中,t为流场内温度;u为流场内湿度;P为环境大气压力;ew为流场温度为t时的饱和水汽压。
再计算总修正系数K。
(5)
其中,z为微压计工作液体的密度修正系数(工作液体为蒸馏水时,z=1);ξ为皮托管系数;Kc为微压计系数(当采用二等微压计时,Kc=1)。
最后计算得出指示风速值ν。
ν=KV
(6)
2.2.2 实测风速ν′的采集
实测风速ν′的输出值通过三杯风速传感器配套的数据采集装置读取,传感器数据输出值为频率信号,需通过其内部算法方程将频率信号转化为风速值[22]。
实验依据计量检定规程,规范地在每个风速样本点重复操作3次,并把输出值换算成计量单位为m/s,取其算术平均值,记为该风速样本点下的实测风速ν′。改变倾斜角度θ和风速样本点后,重复上述步骤。
3 仪器设备溯源
实验用标准器[23]包括:①ZOGLAB 40 m/s开口式直流低速风洞,出厂编号:WZ860040-ES20181212003A,溯源单位:国家气象计量站。②Mensor 2101型数字压力计,出厂编号:532083,溯源单位:中国计量科学研究院。③NPL型标准皮托静压管,出厂编号:7534/2,系数k=1.001,溯源单位:中国计量科学研究院。
三杯风速传感器选取三台同型号不同编号的ZQZ-TF型风速传感器[24],出厂编号分别为HFS10.0092、FS12.1748和Z110200496940144151 201511182262112,溯源单位:国家气象计量站。具有动态特性好、精度高、灵敏度高等特点。工作原理为在风场作用下,三杯式回旋风杯组旋转,通过主轴带动磁棒盘旋转,其上36只磁体形成18个小磁场,风杯组每旋转一圈,在霍尔开关电路中感应出18个脉冲信号,其频率随风速增大而线性增加。
4 收集样本
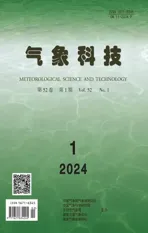
按照实验流程进行标准实验,收集三个同型号不同编号的风速传感器在11组规定风速样本的点条件下,不同倾斜角度θ对应的指示风速ν和实测风速ν′的值(单位m/s)[25],选取其中一个传感器的实验原始记录作为示意见表1,并计算得出实测风速水平方向的分量ν″和示值误差Δν[26]。
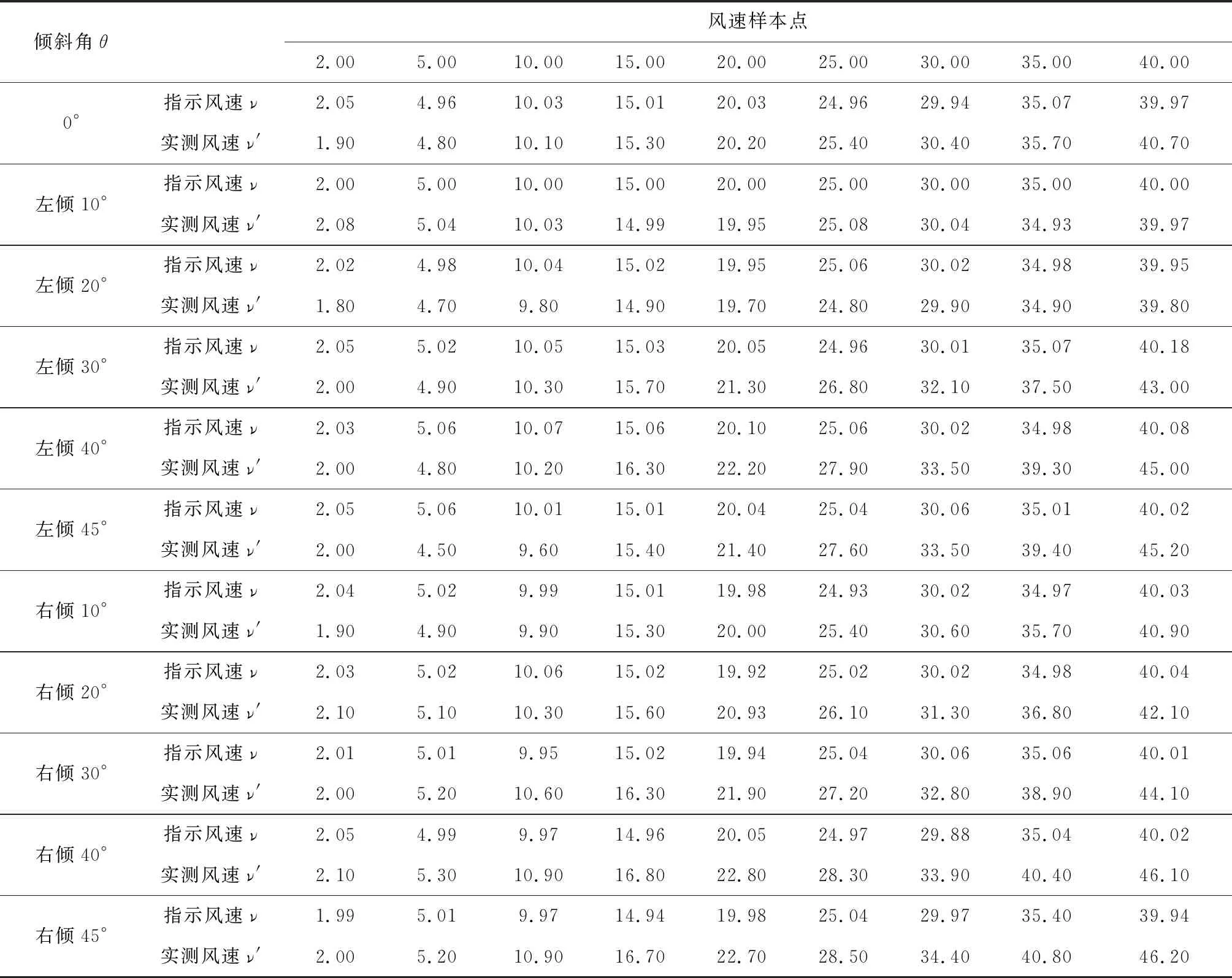
表1 实验原始样本集(部分)
5 数据分析
5.1 示值误差Δν单因素方差
对样本数据中的示值误差Δν进行单因素方差[27]分析结果见表2。可以看出误差平均数与方差和角度之间的关系,即当倾斜角度θ越偏离标准位置时,示值误差平均值的绝对值和方差也越大,亦即三杯风速传感器的准确度越低。假设检验遍及值P小于0.05待变组间有显著差异。

表2 示值误差的单因素方差分析
5.2 示值误差Δν各倾斜角θ下平均值变化趋势
结果如图4所示,当倾斜角度θ增大时,示值误差Δν的平均值越来越小,准确度越来越低。且当倾斜角度θ的绝对值相同时,左倾状态下的示值误差Δν平均值的变化量始终比右倾状态下大,可以认为三杯风速传感器在实际应用状态下, 风从传感器底部向其顶端运动时,即当传感器处于高水平面,近地面空气做上升运动时,对传感器准确度的影响更大[28-29]。
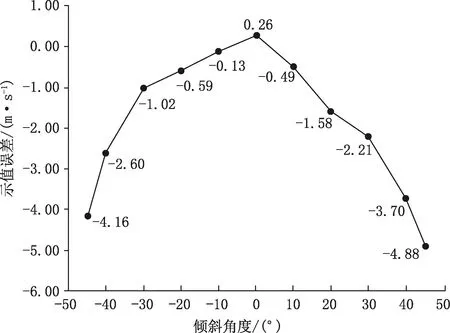
图4 各样本点示值误差平均值随倾斜角度的变化趋势
5.3 左倾45°情况下风速指标变化趋势
选取其中一台风速传感器左倾45°样本组,将其实验数据用图5表示。可以看出,在以计量检定条件为参照设计出的实验当中,指示风速ν和实测风速ν′有很强的一致性。以ZQZ-TF型三杯风速传感器为主要实验对象时,同一样本点下,三杯风速传感器的实测风速值ν′多数情况下均大于气象风洞的指示风速ν。由于在计量检定过程中,二等标气象用风洞所提供的指示风速通常作为标准点不可改变,故使用实测风速水平方向的分量ν″与之对比,发现实测风速水平方向的分量ν″却均小于指示风速ν。指示误差Δν随样本点风速增大而减小。

图5 左倾45°样本组风速与示值误差的变化趋势
5.4 主要变量间的相关性
根据式(7)计算主要变量间的相关性系数。
(7)

由表3可见,指示风速ν和实测风速有显著的正相关性ν′(相关系数r=0.994)。这是因为三杯风速传感器作为风速计量设备,本身具有准确度高的特点,符合客观条件。

表3 主要变量之间的相关系数
示值误差Δν除了与指示风速ν(相关系数r=-0.464)和实测风速ν′(相关系数r=-0.434)有一定程度的负相关性外,还与倾斜角度θ的余弦呈显著正相关关系(相关系数r=0.708)。根据计量检定规程要求,三杯风速传感器的最大允许误差应符合式±(0.5+0.03ν),实验结果符合其规律。
而三杯风速传感器倾斜角度θ的变化,也代表着其所处的风洞试验段环境从水平风场变为非水平风场的变化。示值误差Δν与倾斜角度θ的余弦值呈显著正相关关系(相关系数r=0.708),表示三杯风速传感器在非水平风场作用下所测得的数据准确度较低,受影响明显。
5.5 拟合实测风速ν′
三杯风速传感器在非水平风场下的量值修正算法如下:
ν′=b0+b1ν+b2cosθ
(8)
式中,b0为常数项,b1为指示风速ν的回归系数,b2为倾斜角度θ的回归系数。
根据表4回归分析结果,三杯风速传感器处于非水平风场下时,模型R2=0.991,模型线性关系检验P<0.05,表面模型成立。根据系数检验结果,指示风速ν和倾斜角度的余弦值cosθ均能显著影响实测风速ν′。最终量值修正算法的拟合方程如下:
(9)
表4 非水平风场状态下的回归分析

6 结论
依据国标GB/T 33691—2017杯式测风仪测试方法和计量检定规程JJG(气象)004—2011自动气象站风向风速传感器设计实验,通过改变三杯风速传感器在风洞试验段内的倾斜角度,模拟其在自然界所处非水平风场环境下的情况。实验过程中所使用装置均为气象行业内风速最高标准,且均已溯源,通过对实验样本数据进行分析得出如下结论。
三杯风速传感器的示值误差的绝对值随其所处风场偏离水平方向的程度增大而增大。并且其示值误差与倾斜角度的余弦值呈现显著相关性,相关系数为0.708。同一倾斜角度的情况下,风速样本点越高,示值误差越大。

本文通过探索三杯风速传感器在非水平风场内的测量性能,给出了一套量值传递算法,为三杯风速传感器的计量性能指标提出新的讨论方向,也为新一代机械式三杯风速传感器作为计量器具的新产品型式评价提供思路[30]和参考指标。