基于预测反馈的混合动力汽车制动机构模糊软切换控制技术
2024-04-18黄波何健
黄波 何健
【摘 要】 汽车制动机构系统的模糊控制多采用耦合模型,由于缺少对控制器参数的优化,导致控制误差较大,整体控制效果不佳。为此,提出基于预测反馈的混合动力汽车制动机构模糊软切换控制技术。根据动力汽车制动机构系统的组成结构,分别建立传统制动模型与再生制动模型,利用最小二乘法将其拟合,得到制动系统的综合动力学模型。根据汽车运行的实际工况,分析模糊软切换方式与各工况的匹配度,以获取模糊控制器的权重系数,采用预测反馈机制设计汽车行驶路径指令,并通过优化控制器输入偏差与辨识参数,设计最佳控制策略。实验结果表明,所提方法的控制误差较小,控制效果更好。
【关键词】 预测反馈;混合动力汽车;制动机构;模糊软切换控制
Fuzzy Soft Switching Control Technology for Hybrid Electric Vehicle
Braking Mechanism Based on Predictive Feedback
Huang Bo, He Jian
(Anhui Automobile Vocational and Technical College, Hefei 230601, China)
【Abstract】 The coupling model is often used in the fuzzy control of automobile brake mechanism system. Due to the lack of optimization of controller parameters, the control error is large and the overall control effect is reduced. Therefore, a fuzzy soft switching control technology is proposed based on predictive feedback for hybrid electric vehicle braking mechanism. According to the composition structure of the braking mechanism system of the power vehicle, the traditional braking model and the regenerative braking model were established respectively. The least square method was used to fit them, and the comprehensive dynamic model of the braking system was obtained. According to the actual operating conditions of the vehicle, the matching degree between the fuzzy soft switching mode and each operating condition was analyzed, so as to obtain the weight coefficient of the fuzzy controller. The predictive feedback mechanism was used to design the vehicle routing instruction, and the optimal control strategy was designed by optimizing the input deviation and identification parameters of the controller. Experimental results show that the control error of the proposed method is small and the control effect is better.
【Key words】 predictive feedback; hybrid electric vehicles; brake mechanism; fuzzy soft switching control
〔中图分类号〕 V249.1 〔文献标识码〕 A 〔文章編号〕 1674 - 3229(2024)01- 0047 - 07
0 引言
随着越来越多节能减排政策的提出,新能源汽车已成为主要发展方向,其中混合动力汽车逐渐成为人们的首选。混合动力汽车通过发电机和动力电池之间的电气连接为整个车辆提供电力,同时在各自的范围内保持每个模块的最高效率。然而,由于驾驶条件的复杂性和可变性以及驾驶员动作的随机性,整车的平顺性容易受到影响。因此,应根据车辆的行驶情况设计相应的制动机构系统控制策略,从而有效降低车辆的垂直震动,以确保行车安全。
王玉文等 [1]提出高速开关阀控位置伺服系统的模式切换控制,设计“比例-积分-微分控制器(Proportional-Integral-Derivative,PID)+模式切换”控制器,以位置误差的PID控制器输出值和主阀两腔压力作为工作模式切换的依据,通过工作模式的实时切换,实现了主阀的高精度位置控制,但该方法未考虑到控制过程运行参数的变化,使得最终控制效果不理想。王永涛等[2]提出基于改进灰色预测单神经元PID的不间断稳定电压(Uninterruptible Regulated Voltage,URV)伺服控制系统,建立序列-残差联合灰色预测模型,通过对预测残差的二次预测修正,取代测量结果进行控制运算,实现对控制系统的精准控制,但该方法缺乏全局观,无法求取最优切换指标,故控制性能不佳。本文以预测反馈机制为依托,针对混合动力汽车制动机构设计一种模糊软切换控制技术,以更好地提升制动系统在各工况下的自适应能力,为行车安全提供保障。
1 混合动力汽车制动机构模糊软切换控制技术设计
1.1 混合动力汽车制动机构建模
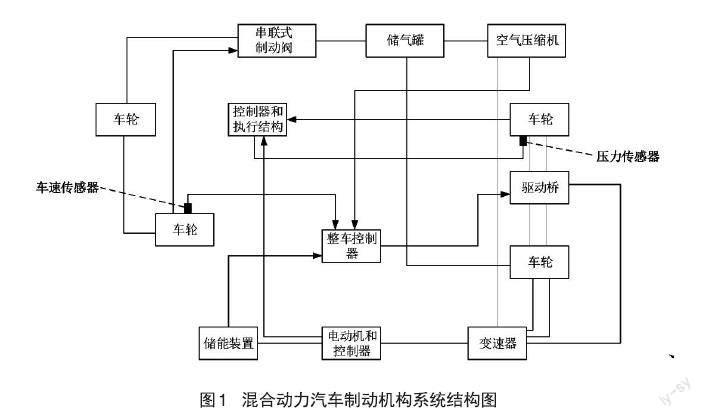
为了研究模糊控制混合动力电动汽车制动机构的运行,有必要为所研究的制动机构对象及其相关的外部扰动建立相应的模型。一般混合动力电动汽车的制动机构包括传统制动系统和再生制动系统。在发电机的作用下,制动机构运动可分为高频运动和低频运动。因此,在对汽车制动机构进行建模时,需要根据其内部结构分别建立相应的模型并进行拟合,得到综合数学模型。混合汽车制动机构系统的结构如图1所示。
为了便于分析,以传统制动系统和再生制动系统的质心为坐标原点,分别建立为北东坐标系和参考坐标系。由于汽车运动速度慢、范围小、时间短的特点[3],通常将北东坐标系视为惯性坐标系,将系统的矢量坐标值变量进行积分,得到以下形式:
[η0=PxoyΘaob v0=UxoyΩaob τ0=FxoyMaob ] (1)
式中,[η0]、[v0]、[τ0]分别表示在标准坐标系下系统的位置矢量、速度矢量和姿态矢量;[Pxoy]表示在传统制动系统坐标系[xoy]下制动系统的位置;[Θaob]表示在再生制动系统坐标系[aob]下制动系统的姿态角;[Uxoy]表示[xoy]下系统的平均速度;[Ωaob]表示[aob]下系统运动的角速度;[Fxoy]表示[xoy]下系统的最大力矩;[Maob]表示[aob]下系统的平均力矩。
根据欧拉旋转定理,以系统线速度为控制输入,角速度为控制输出,则可得到系统的运动机理为:
[T0=T1η0+v0+τ0+k0] (2)
式中,[T0]表示制动系统的运行过程;[T1]表示时间变量;[k0]表示待定常数。
进而可得到制动系统在发电机驱动作用下的传递函数:
[GS=T0k1ST2+1] (3)
式中,[k1]表示离散化系数;[S]表示系统的能量损耗;[T2]表示系统波动因子。
将制动机构系统表达为离散时间系统[4],则有:
[xt=GS+xt+Δtxt-α0] (4)
式中,[xt]表示制动系统的离散化方程;[t]表示采样周期;[Δt]表示采样周期变化量;[α0]表示系统的性能特征值。
由于研究对象为不含中频运动的系统,因此可假设在姿态角和位置角很小的情况下,推导传统制动系统的数学模型[5],即:
[β1=Rψxtv1] (5)
式中,[β1]表示汽车传统制动系统的数学模型;[Rψ]表示旋转矩阵;[v1]表示系统的初始运行速度。
对于再生制动系统的建模,为了简化操作,通常只考虑系统的三自由度动力学模型[6],可以得到如下向量方程:
[M0=β1τ1Cv+Dv] (6)
式中,[τ1]表示速度传感器产生的力矩;[Cv]和[Dv]分别表示整车控制器和变速器的速度;[M0]表示系统惯性矩阵。
在建立汽车再生制动系统的数学模型时,基于动量定理,根据汽车运动时同一方向上的力和转矩之间的关系,导出动力学方程。假设汽车是一个刚体[7],其所在位置处的空气阻力为0,则车身的质量分布相对于参考坐标系的平面是均匀对称的。根据以上假设可以得到下式:
[sk=-M0ε0xksgns'k] (7)
式中,[sk]表示系统的惯性矩阵;[ε0]表示外界环境干扰力;[xk]表示阻尼系数矩阵;[s'k]表示状态趋近律函数;[sgn.]表示结构函数。
另外,假设附加质量的中心和重心一致,从而可以得出与车体附加质量相关的向心力矩阵[8],即:
[vk=1-q1sk-ε1sgnv'k] (8)
式中,[q1]表示平衡系数;[ε1]表示单调饱和性系数;[v'k]表示替换符号函数。
由此可得到汽车再生制动系统的数学模型为:
[β2=vk1+e-α2+Scs] (9)
式中,[e]表示系统增益量;[α2]表示奇异线性变换函数;[Scs]表示系统气动力。
采用最小二乘法将汽车的传统制动系统模型和再生制动系统模型进行超平面拟合,得到:
[β=λ1β1+λ2β2] (10)
式中,[λ1]、[λ2]分别表示对应模型的连接权重;[β]表示汽车制动系统的数学模型。
根据混合汽车动力机构的基本结构,基于其运动特性和动力学原理,分别建立传统制动机构模型与再生制动机构模型,并利用最小二乘法加固两者拟合,得到制动系统综合模型,为切换权重系数的确定提供了有利条件。
1.2 模糊软切换权重系数的确定
混合动力汽车制动机构建模后,确定模糊软切换权重系数。模糊软切换控制的权重主要衡量模糊控制器的控制方式与汽车当前运行条件的匹配程度[9]。在实际工况条件建立后,通常通过不同操作条件下的条件差异切换控制模式。如果在工况之间建立模糊规则,则可以根据相应的模糊规则确定制动系统在该工况下的比例,然后根据车辆在不同工况下的运行状态设计相应的模糊软切换控制策略。本文通過全局模型确定软切换权重系数,具体计算过程如下。
被控对象处于第[i]种工况的概率为:
[pi=wi'i=1mβ] (11)
式中,[wi']表示属于第[i']种模糊规则的隶属度值;[m]表示汽车工况数量。
制动系统的串联式制动阀在汽车运行时产生的能量变化为:
[E1=2A1?h1?piT1-T0] (12)
式中,[A1]表示系统的总温度;[h1]表示制动器摩擦系数;[T1]、[T0]分别表示制动系统的稳定温度和初始温度。
使用正方形网格覆盖第[j]个分模糊规则的网格数[10],则由其定义的采样分形维数为:
[d0=1+log2E1Δ1+Δ2dj] (13)
式中,[Δ1]、[Δ2]分别表示横向和纵向网格数;[dj]表示系统特征突变点。
以优化对象为目的,建立用于平滑切换的性能指标函数,即:
[Jt=ft?rt+d0?eτ] (14)
式中,[ft]表示指标辨识误差函数;[rt]表示平滑函数;[eτ]表示模型与真实被控对象之间的匹配函数。
在某一时刻,只存在一个最佳切换权重系数投入到控制器中[11],则对于切换的初始值定义如下:
[ν0=ηw?sJt] (15)
式中,[ηw]表示车体高频运动位置向量;[?s]表示密度函数,其计算公式为:
[?s=hsω0] (16)
式中,[hs]表示自由度全谱功率函数;[ω0]表示阻尼项常数。
由全局模型向量可以得出模糊软切换权重系数为:
[u0=?sv0utkt] (17)
式中,[ut]表示系统的控制输入向量;[kt]表示全局模型向量;[u0]表示模糊软切换权重系数。
在汽车制动机构系统动力学模型基础上,根据汽车所处工况类型,采用全局模型计算被控对象的隶属度函数,结合切换性能指标函数,确定模糊软切换权重系数,为最终实现汽车制动机构软控制提供数据基础。
1.3 基于预测反馈的模糊软控制策略设计
基于上述模糊软切换权重系数的确定,设计基于预测反馈的模糊软控制策略。在实际场景中,由于外部环境处于不断变化中,这要求汽车能够随时改变方向、灵活转弯和前进[12]。本文阐述的基于预测反馈的汽车制动机构系统的模糊软切换控制方法如图2所示。
制动系统在车辆运行初期的姿态定义为[S1],考虑路面的随机变化,基于车身的垂直速度和加速度,并结合车辆自身结构的设计,形成双输入单输出控制模型[13],为了确保车辆各部件的运行不受干扰,控制器应确保系统的动态偏转保持在一定的行程范围内,以降低碰撞的概率,即:
[W1=X'-S1u0] (18)
式中,[W1]表示制动结构与其他部件碰撞的概率;[X']表示本身车体运动行程。
软切换控制策略的关键在于设计输入和输出的比例因子,使系統的输入控制变量适应模糊域,系统输入能够充分利用模糊规则,提高控制精度[14]。
由于车速传感器获得值的延迟,可以使用指数平滑迭代方法来预测下一时刻车身可能的角变化速度,即:
[v=φ0W1+1-φ0vt-1] (19)
式中,[φ0]表示折扣因子;[vt-1]表示[t-1]时刻的平滑值。
将路径的跟踪误差定义为[σ0],则行驶路径指令为:
[γd=arcsin-kh-vσ0] (20)
式中,[kh]表示行车轨道角。若[kh>0],行车轨迹角随着路径指令[γd]的变化而变化,进而可将路径跟踪误差调节到近似为0[15]。
对于模糊控制器的自适应律表示如下:
[θ=-γdhyxy+ηy] (21)
式中,[hy]、[xy]分别表示增益矩阵和波动矩阵;[ηy]表示系统随机矢量[16-17]。
若切换时刻为[i+1T],在前一时刻[iT]时的输出控制量为[ui],则存在如下式:
[ui=θ+ρki+1T-iT+Ii] (22)
式中,[ρk]表示控制器的输入偏差[18-19];[Ii]表示偏差积分。
在未切换前,将控制器的输入偏差积分[Ii]置零,则有:
[Ii=0] (23)
则可由式(22)和(23)确定[ρk]。
在[i+1T]的突变时刻[20-22],使下一时刻的控制量[ui+1]与当前控制量[ui]相等,则由下式计算控制器的辨识参数[ρi],即:
[ui+1=ui=θ+ρki+1T-iT+Ii+1] (24)
通过上式计算,可保证汽车制动系统在两个工况切换时刻已确定好控制器的最佳参数[ρk]和[ρi][23-26],则可在进入新的稳定工况后重新在线计算控制器的参数以备顺利进行软切换控制。至此,完成基于预测反馈的混合动力汽车制动机构模糊软切换控制技术的设计。
2 实验论证
2.1 实验准备
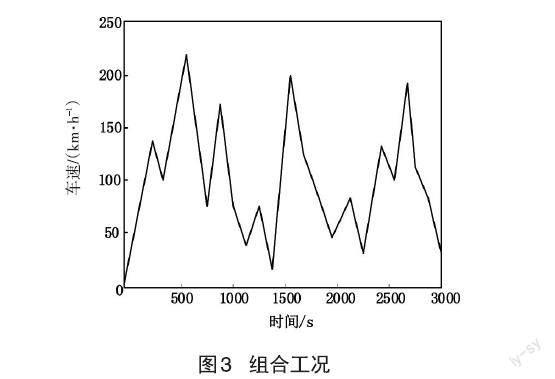
将MATLAB仿真软件作为实验的开展平台,通过构建汽车制动机构系统动力学模型,实现本文所提策略。将刚性路面、柔性路面、对接路面和半刚性路面4种路段作为组合工况,如图3所示。
在实验中,通过研发与生产技术的集成,实现了闭环实验并验证所提出的模糊软开关控制策略的性能。该平台具有快速开发车辆控制策略的功能,主要包括GNU编译器套件(GNU Compiler Collection,GCC)、代码编辑器和软件检测模块。将文中建立的制动系统动力学项目输入到仿真平台的调试模块中,并根据预测反馈机制参数设定,对控制器的内部参数进行优化,便于主控制器的识别。
为保证本文所提控制策略在保持控制器最佳控制参数的同时,汽车能够根据当前所处的实时运行工况使制动系统在高效率区间工作,设置动力电池的电荷释放率为0.50%,平均变化值为0.20,并将汽车匀速行驶作为闭环循环工况。
2.2 实验说明
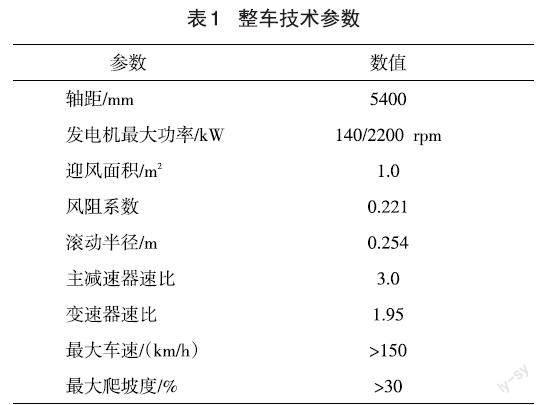
选用Insight串联式混合动力汽车作为实验案例,以其中的制动机构系统作为试验对象,整车技术参数如表1所示。
将实验平台的水平给进速度给定值设置为1.5 m/s,在5 s时添加200 N的负载扰动。设置在汽车匀速行驶工况下的仿真条件为:绝对风速6 m/s,平均风向角120°,空气阻力系数0.35;模糊控制器的参数为:增益系数10.25,积分系数3.60,微分系数8.39。
2.3 模糊软切换控制策略应用结果
将所提方法应用于实验整车制动机构系统的控制中,在无外加力干扰下,取路面上的轨迹点(50,50)(400,400)(800,400)(1000,50)(1500,420)连接而成的曲线作为汽车的预设路径。初始行驶速度设为60 m/s,速度变化为60 m/s→70 m/s→80 m/s→90 m/s。利用文中方法对其制动机构进行模糊软切换控制,得到的运行轨迹跟踪仿真图如图4所示。
从图4汽车速度响应曲线可以看出,利用本文设计的制动机构系统模糊软切换控制策略对其速度进行控制,得到的跟踪速度路径与预设速度路径的拟合程度较高,在整个实验采样期间,特定时间点的控制速度基本与期望速度一致。说明基于预测反馈的汽车制动机构模糊软控制技术能够准确控制混合动力汽车的运行速度,控制效果较好。
2.4 控制误差对比实验分析
为进一步体现本文方法在控制准确性方面的性能,采用文献[1]提出的高速开关阀控位置伺服系统的模式切换控制方法(方法1)和文献[2]提出的基于改进灰色预测单神经元PID的URV伺服控制方法(方法2)作为本文方法的对比方法,将三种方法分别应用于试验混合动力汽车制动机构系统的控制中,并统计不同方法下车身垂向加速度的均方根值,该数值越小,表明控制误差越小,控制效果越佳,结果如表2所示。
由表2数据可知,车辆在不同北向行驶位置中,在本文方法控制策略下的车身垂向加速度均方根值均远小于对比组方法,在变路面激励下能够尽可能保证车辆行驶的平顺性,控制效果较好。方法1的控制效果要明显优于方法2,但从整体来看,其控制性能还不太理想。主要是由于方法1在对接路面等复杂工况时,其控制策略的工况自适应能力较差,不适用于变路面工况,且对于未知工况,其模型构建有限,影响了控制效果。方法2控制误差较大的原因是该方法主要根据工程需要选用相应控制模型的个数和控制策略,但忽略了对轮胎挠度和动载荷等多项影响因素的考虑,故整体控制效果较差。
3 结语
本文以混合动力汽车为研究对象,针对制动机构系统提出一种基于预测反馈的模糊软切换控制策略。通过构建系统的动力学模型与计算控制器的切换权重,结合预测控制与逆动力学原理,得到最佳控制策略。对比实验结果表明,本文设计的方法具有更为理想的控制效果。下一步可以优化所提方法,使其能够适用于汽车的慢时变工况。
参考文献
[1] 王玉文,朱玉川,陈晓明.高速开关阀控位置伺服系统的模式切换控制[J].液压与气动,2023,47(4):36-45.
[2] 王永涛, 肖俊辰. 基于改进灰色预测单神经元PID的URV伺服控制系统研究[J]. 四川兵工学报, 2021, 42(8):251-257.
[3] 李天景,王琨,陆从相,等.四轮驱动混合动力汽车模式切换协调控制[J].车用发动机,2023(1):78-83.
[4] 王国栋,王丽芳,吴艳,等.基于单电流调节器的永磁同步电机深度弱磁控制及模式切换控制策略[J].汽车工程,2023,45(2):219-230.
[5] 金毅仁,陈刚.双套冗余多普勒天气雷达切换控制软件模块设计[J].长江信息通信,2023,36(2):12-16.
[6] 左曙光,罗莹.一种用于主动磁轴承不平衡补偿的切换控制法[J].机电产品开发与创新,2023,36(1):92-96+103.
[7] 刘景霞,王硕秋.微电网并离网平滑切换控制策略研究[J].电工技术,2023(2):29-31+35.
[8] 赵奕州,何冬辉,林茂盛,等.燃气轮机发电机组双燃料切换全程自动控制策略[J].东北电力技术,2023,44(1):12-15+21.
[9] 陈铁锋,杜文.基于距离度量的火电机组协调系统软切换预测控制[J].热能动力工程,2021,36(3):87-92+121.
[10] 蔡佳浩,王前進,辅小荣,等.矿井主要通风机切换过程供给风量优化控制研究[J].工矿自动化,2023,49(1):140-145+161.
[11] 王新宇,王生铁,刘瑞明,等.交直流混合微电网并离网平滑切换控制策略研究[J].内蒙古工业大学学报(自然科学版),2022,41(6):531-540.
[12] 李霞,李明烨,张孝铭,等.人机混驾交通流交织区换道模型切换控制策略[J].交通信息与安全,2022,40(6):45-52+62.
[13] 韦斌,隋宇,邓小玉,等.多微网解列运行模式切换控制方法研究[J].电源学报,2023,21(2):100-105.
[14] 鞠佳明,姜皓天,张均东,等.船舶双燃料发动机燃料模式切换的仿真研究[J].中国航海,2022,45(4):112-116+128.
[15] 刘星.基于电磁悬架系统的馈能模式切换控制策略研究[J].电子技术与软件工程,2022(23):120-123.
[16] Awe S A .Premature failure of an automobile brake disc: Effect of nonmetallic inclusions[J].Engineering Failure Analysis, 2022, 137:106263.
[17] Jung H K , Park G , Kim J K .Piezoelectric-based dither control for automobile brake squeal suppression under various braking conditions[J].Journal of Vibration and Control, 2021, 27(19-20):2192-2204.
[18] Yuan C S S .Mechanism-oriented control for suppressing start-up judder of vehicle with automatic dry clutch: Experiment and simulation analysis[J].Proceedings of the Institution of Mechanical Engineers, Part D. Journal of Automobile Engineering, 2021, 235(2-3): 744-758.
[19] Li H , He B .Preparation of Fe-Cu-Based Friction Material and its Adoption in Automobile Mechanical Mechanism[J].Key Engineering Materials, 2021, 871:170-175.
[20] Siham K , Mokhtar B , Tawfik T ,et al.Study of the Mechanical Behavior of an Automobile Brake Disc[J].Periodica Polytechnica. Mechanical Engineering, 2021, 65(3): 197-204.
[21] Zhao C , Ding H , Cao G ,et al.A New Method for Detecting Compensation Hole Parameters of Automobile Brake Master Cylinder Based on Machine Vision[J].Journal of advanced transportation, 2021, 2021: 1-14.
[22] Zheng X , Zhou Q , Hao Z ,et al.Research on mechanism diagnosis of an idling abnormal noise of automobile engine[J].Applied Acoustics, 2021, 171:107670.
[23] Liang X , Wang Q , Chen W ,et al.Coordinated control of distributed drive electric vehicle by TVC and ESC based on function allocation:[J].Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2022, 236(4):606-620.
[24] Chen Y , Li Y .Control of Electronic Mechanical Brake System on Automobile Electromechanical Brake[J].Journal of Physics: Conference Series, 2021, 1802(3):032012 (7).
[25] Wagh M N , Manghai T M A , Jegadeeshwaran R ,et al.Application of Meta family Classifiers for monitoring hydraulic brake system using vibration based statistical learning approach[J].Journal of Physics: Conference Series, 2021, 1969(1):012050 (8).
[26] 耿婧. 基于模糊PID的智能小車单片机温度控制技术[J]. 廊坊师范学院学报(自然科学版),2022,22(4):30-36.
