轻量化工业机器人本体设计
2024-04-14余天荣傅志锋黄浩墘
余天荣 傅志锋 黄浩墘

摘要:隨着双碳政策的出台,节能减排成为未来工业机器人发展的重要趋势。要降低工业机器人的能耗,最直接有效的方式就是实现机器人本体的轻量化设计。鉴于此,概述了轻量化工业机器人本体的设计方法。
关键词:工业机器人;双碳;轻量化设计
中图分类号:TP242.2 文献标志码:A 文章编号:1671-0797(2024)07-0056-04
DOI:10.19514/j.cnki.cn32-1628/tm.2024.07.015
1 设计背景及目标
1.1 工业机器人本体的发展趋势
工业机器人是先进制造业的关键支撑装备,大力发展机器人产业,对于打造中国制造新优势,推动工业转型升级,加快制造强国建设具有重要意义。近几年,我国持续劳工荒,人工成本快速上涨,加上劳工对工作健康环境日益重视,传统制造业转型升级,使用机器人替代人,已成为未来工业发展的新趋势。
随着“我国力争2030年前实现碳达峰,2060年前实现碳中和”重大战略决策的出台,节能减排成为未来工业生产的必然趋势[1],而想要降低能耗需要技术的进步和创新。传统工业机器人的负载自重比极低,电机的功耗大部分用于负荷机器人本体本身的运动,真正用于做有用功负载搬运的能量占比很少,往往不到10%,造成极大的能源浪费。要降低工业机器人的能耗,最直接有效的方式就是提高机器人的负载自重比,即进行本体的轻量化设计[2]。
1.2 设计目标
经调研,传统6~8 kg负载的机器人负载自重比小于1:20。本文目标为通过轻量化设计,使得6~8 kg负载机器人在相近性能参数的前提下,本体重量降低50%以上,即本体重量在60 kg左右,负载自重比达到1:10以上。
2 轻量型工业机器人本体结构设计
传统小六轴工业机器人的减速器配置为1~3轴采用3个摆线针轮减速器,4~6轴采用3个谐波减速器。6个减速器的总重量为25 kg,加上6个电机的总重量为35 kg。铸件1~3轴采用铸铁件,总重量为100 kg,4~6轴采用铸铝件,总重量为30 kg,铸件总重量为130 kg,电机减速器加铸件的总重量为165 kg。由此可见,采用传统的配置方案,机器人本体是很难实现大幅度减重的。因此,本文轻量化机器人设计对电机减速器重新进行选型,6个轴都采用了谐波减速器,铸件全部采用铸铝件,可以大幅降低本体重量,在此基础上重新进行电机选型,可以大幅降低电机的功率要求,从而减小电机尺寸,减轻电机重量。基于此,重新进行本体铸件的设计,可以减小铸件的尺寸和重量。完成设计后,重新对电机、减速器、铸件进行仿真分析校核,反复验证修改,最终达到使用要求。
2.1 初步拟定设计参数
初定机器人的负载、本体重量、臂展与各轴最大速度等参数,要求机器人本体整机防护等级在IP65以上,如表1所示。
2.2 传动结构设计
以J1轴为例,采用中空减速器,同步带传动,便于穿线。2~5轴采用类似传动结构,整机内走线,便于密封,整机防护等级可以达到IP65。6轴采用电机减速器直连的结构,结构简单紧凑,一致性、可靠性高。
本体结构模块化、紧凑化设计。1、2轴底座部分,3、4轴箱体部分,5、6轴腕体部分形成标准化、模块化设计,便于独立安装和自由组合。RB06Q1-1430、RB08Q1-1230、RB06Q1-1600采用模块化设计,通过不同模块和连杆的组合,得到不同臂展、不同负载、不同速度的工业机器人本体,形成系列化产品,以满足不同客户、不同应用场合的使用要求。
2.3 本体结构特点
1)重量轻,本体重量约为60 kg,负载自重比约为1:10,节省空间,节能;
2)防护等级高,整机IP65,对恶劣应用环境的适应性更高;
3)整机的安装占地面积小,可360°安装,轻松实现狭小空间内工作;
4)模块化、系列化设计。
3 轻量型工业机器人仿真分析校核
3.1 轻量化设计技术
工业机器人的带载作业为瞬态过程,其关键零部件如关节臂、齿轮、轴承等在作业过程中是动态的受力过程。因此这些零部件的强度计算不能按照静态问题去分析,需要使用动力学仿真机器人带载作业,并提取关键零部件的动态载荷,将其输入有限元分析软件中对关键零部件进行强度分析,为关键受力部件的结构优化设计提供数据支持。使用有限元分析软件进行刚强度分析,可以实现关键零部件的结构优化,在满足刚强度要求的前提下实现机器人的轻量化设计,降低成本,提升产品竞争力。工业机器人轻量化设计技术路线如图1所示。
3.2 动力学校核
在三维软件Solidworks中建立轻量型机器人几何模型,并对模型机械结构进行设计简化,将其保存为x_t格式导出。在动力学软件Adams中导入模型。
在机器人动力学仿真中,为校核电机减速器的性能,一般取其最大臂展下单轴的极限速度的90%作为校核工况。现取轻量型机器人J1轴进行动力学仿真分析,关节驱动最高速度为220(°)/s,关节加减速时间0.25 s,关节驱动选用STEP函数驱动表达式为:
STEP(TIME, 0, 0, 0.25, 198D)+STEP(TIME, 0.3, 0,
0.55, -198D)+STEP(TIME, 0.6, 0, 0.85, -198D)+
STEP(TIME, 0.9, 0, 1.15, 198D)
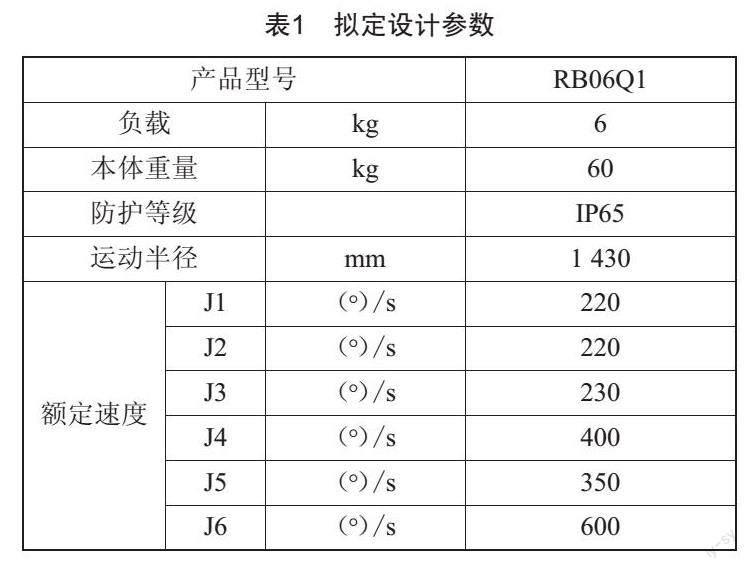
如图2所示,J1轴关节启动包括加速、匀速、减速三个阶段,由于关节自身存在摩擦,在加速阶段驱动扭矩与摩擦力矩方向相反,驱动力矩克服摩擦力矩驱动关节做加速运动,此时关节驱动扭矩最大;在减速阶段驱动扭矩与摩擦力矩方向相同,驱动关节做减速运动,故在减速阶段关节驱动力矩将略小于加速阶段。
基于上述分析可得,考虑摩擦力矩作用,J1轴关节在极限工况下所需最大扭矩为998 N·m,减速阶段所需扭矩为562 N·m;由轻量型机器人J1轴所选电机、减速器型号参数可得电机最大扭矩8.4 N·m;减速器减速比100;减速器与电机之间采用同步带传动,减速比为4/3。经计算电机所需最大扭矩为:
998×■×■÷95%≈7.9 N·m<8.4 N·m
符合电机减速器要求。
3.3 动态静力学校核
通常的静力学校核往往采用静态载荷,该种校核简单方便,但无法准确计算机器人关节在整個加减速阶段的载荷的动态变化对零部件应力及形变的影响。本文采用一种动态静力学校核方法,先获取机器人在动力学仿真分析中所得到的各关节动态载荷曲线,截取某一时刻的载荷导入有限元分析软件,从而得到动态载荷的静力学仿真结果。
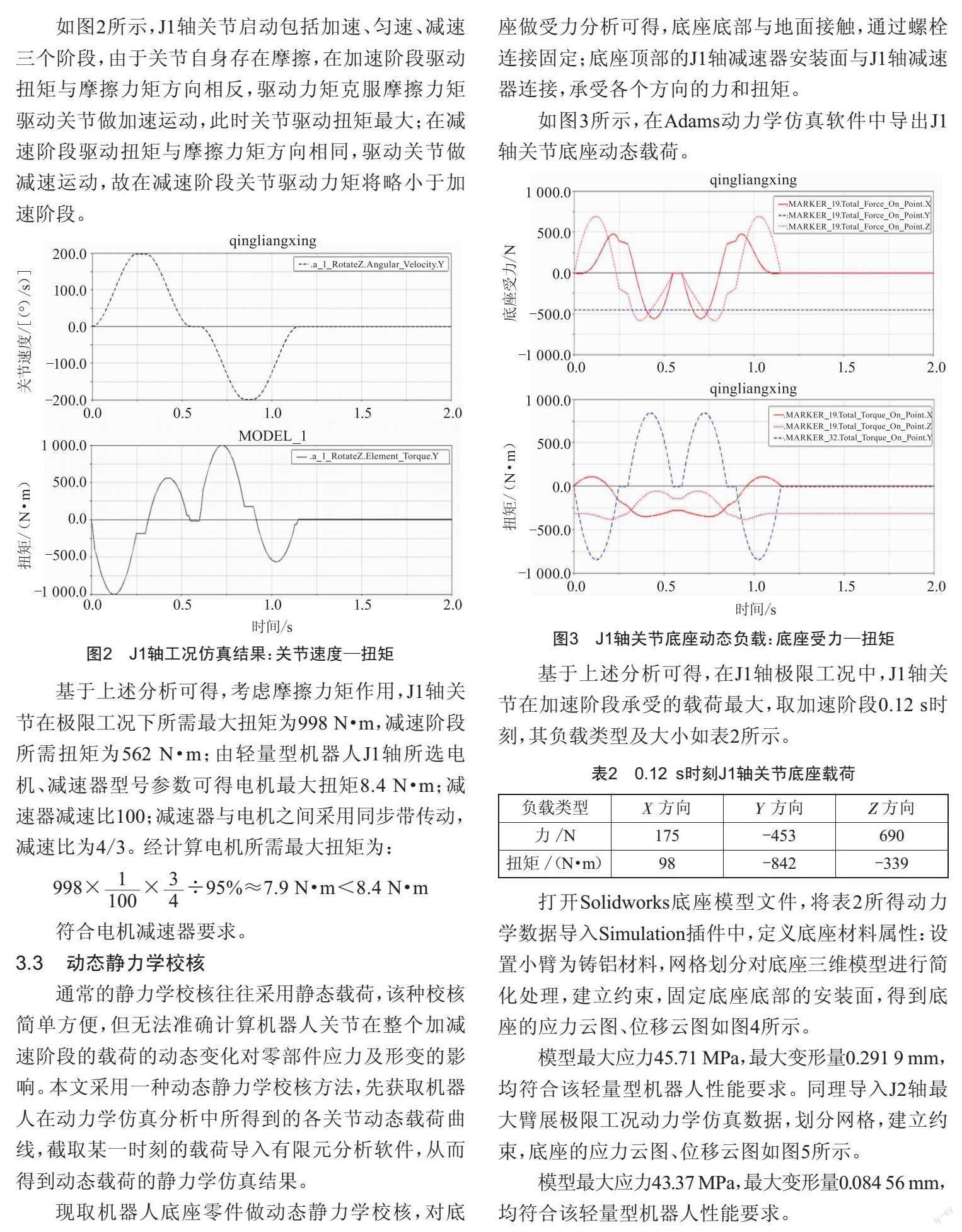
现取机器人底座零件做动态静力学校核,对底座做受力分析可得,底座底部与地面接触,通过螺栓连接固定;底座顶部的J1轴减速器安装面与J1轴减速器连接,承受各个方向的力和扭矩。
如图3所示,在Adams动力学仿真软件中导出J1轴关节底座动态载荷。
基于上述分析可得,在J1轴极限工况中,J1轴关节在加速阶段承受的载荷最大,取加速阶段0.12 s时刻,其负载类型及大小如表2所示。
打开Solidworks底座模型文件,将表2所得动力学数据导入Simulation插件中,定义底座材料属性:设置小臂为铸铝材料,网格划分对底座三维模型进行简化处理,建立约束,固定底座底部的安装面,得到底座的应力云图、位移云图如图4所示。
模型最大应力45.71 MPa,最大变形量0.291 9 mm,均符合该轻量型机器人性能要求。同理导入J2轴最大臂展极限工况动力学仿真数据,划分网格,建立约束,底座的应力云图、位移云图如图5所示。
模型最大应力43.37 MPa,最大变形量0.084 56 mm,均符合该轻量型机器人性能要求。
4 结束语
本文通过机器人正向设计技术,对电机减速器重新进行选型,重新设计传动结构及零件,借助数字样机技术,通过仿真分析校核,确认轻量型机器人性能参数达到了设计目标。通过模块化设计,将每个轴的关节做成标准模块,进行系列化设计,以满足不同客户、不同应用场合的使用要求。
[参考文献]
[1] 谢典,高亚静,刘天阳,等.“双碳”目标下我国再电气化路径及综合影响研究[J].综合智慧能源,2022,44(3):1-8.
[2] 陆汉林,胡利永,孙宝寿,等.基于碳纤维复合材料的机器人臂杆优化设计[J].机械制造,2021,59(11):4-8.
收稿日期:2023-11-30
作者简介:余天荣(1987—),男,广东茂名人,机械工程师,研究方向:工业机器人。
