城轨列车全自动运行系统噪声子空间鲁棒预测控制方法
2024-04-12颜争兰清群
颜争 兰清群
摘要:为建立与实际运行状态更吻合、预测精确度更高的城轨列车全自动运行(fully automatic operation,FAO)系统预测控制模型,根据城轨列车运行的历史数据,综合考虑城轨列车运行过程中的噪声干扰,采用子空间辨识方法得到含噪声的预测控制模型,控制过程不断加入实时采集的数据,迭代模型辨识的历史数据,在线更新模型参数,得到抗干扰能力较强的城轨列车FAO系统噪声子空间鲁棒预测控制器。分别采用幅值为0、2、5、10 km/h的随机干扰噪声,在软件MATLAB中进行仿真试验,对比分析城轨列车FAO系统噪声子空间鲁棒预测器与传统子空间预测控制器的预测精度。结果表明:在随机噪声干扰下,城轨列车FAO系统噪声子空间鲁棒预测控制器的预测精度较高,噪声幅值为10 km/h时预测精度比传统子空间预测控制器提高14.21%。城轨列车FAO系统噪声子空间鲁棒预测控制器可在强干扰运行状态下高精度跟踪给定运行曲线。
关键词:城轨列车;FAO系统;噪声子空间;鲁棒;预测控制
中图分类号:U231+.6文献标志码:A文章编号:1672-0032(2024)01-0015-08
引用格式:颜争,兰清群.城轨列车全自动运行系统噪声子空间鲁棒预测控制方法[J].山东交通学院学报,2024,32(1):15-22.
YAN Zheng, LAN Qingqun. A robust subspace predictive control method on noise of fully autonomous operation system for urban rail train[J].Journal of Shandong Jiaotong University,2024,32(1):15-22.
0 引言
城轨列车全自动运行(fully automatic operation,FAO)系统是采用现代计算机通信技术和智能人工控制技术的新一代轨道交通运行控制系统[1],可实现列车自动唤醒、出库、正线运行、停车对标、障碍物脱轨检测、蠕动模式、作业人员防护和火灾报警等功能,控制城轨列车低延时、高可靠性运行,真正做到无人驾驶。城轨列车自动化运行系统主要包含GoA0~GoA4 5个等级[2-3],FAO系统处于GoA3和GoA4 2个最高等级,可实现无司机的全自动运行。根据中国城市轨道交通协会统计,截至2022年年末,我国内地(不含港澳台)的城轨FAO系统已运营15条线路,涵盖北京、上海、天津、重庆等15座城市,运营总里程达716.83 km,其中2022年开通线路达162.46 km[4]。到2030年,全球城轨列车全自动运行运营里程将达到2018年运营里程的3倍,我国新增运营里程占大部分[5]。随着城轨列车自动化运行程度的提高,在列车自动唤醒到回库整个过程中未被考虑的因素逐渐凸显。城轨列车运行时受众多不确定因素的噪声扰动,噪声主要来自:一是以气动作用为主的动态环境,如大横风、长隧道、地震波及冰冻天气等,占主导因素;二是以机械作用为主的车体本身结构,如牵引电机振动、主要零部件疲劳磨损及测量仪器自身误差等,二者均直接影响城轨列车FAO系统控制器的控制精度。
城轨列车FAO系统可按事先设定曲线运行,不因驾驶员的不同控制而偏离既定曲线,保证城轨列车在最佳状态运行,更加节能和减少磨耗,提高运行效率,降低运行成本[6]。精确的列车模型和控制算法是城轨列车运行控制的重点。城轨列车运行控制算法主要分为2大类,第1类是基于数值的算法,如仲维锋等[7]以位移为变量,采用序列二次规划算法,根据速度曲线得到城軌列车运行的牵引/制动序列,实现城轨列车在最小牵引能耗下运行;高豪等[8]把城轨列车运行控制设计为多目标的动态规划问题,通过优化列车运行模型,满足列车正点和节能的要求。第2类是智能控制算法,如Zhu等[9]设计城轨列车自动驾驶(automatic train operation,ATO)系统的多目标模型,在遗传算法中引入惩罚函数,满足列车精确停车、正点及舒适性的控制需求;Goodwin等[10]以城轨列车运行时间和能耗为优化目标,考虑驾驶模式和停站时间的不可控性,设计多车运行优化控制策略,控制鲁棒性较高。文献[11]基于子空间辨识方法搭建城轨列车ATO系统的子空间预测控制模型,对速度、位移和加速度的控制效果较好,但未考虑城轨列车运行过程中发生的自身结构参数和外界因素的持续变化。
本文在已有城轨列车传统子空间预测模型中加入噪声子空间预测模型,考虑持续噪声干扰,设计城轨列车FAO系统噪声子空间鲁棒预测控制器,采用软件MATLAB在不同噪声幅值干扰下进行仿真试验,验证控制器的预测精度。
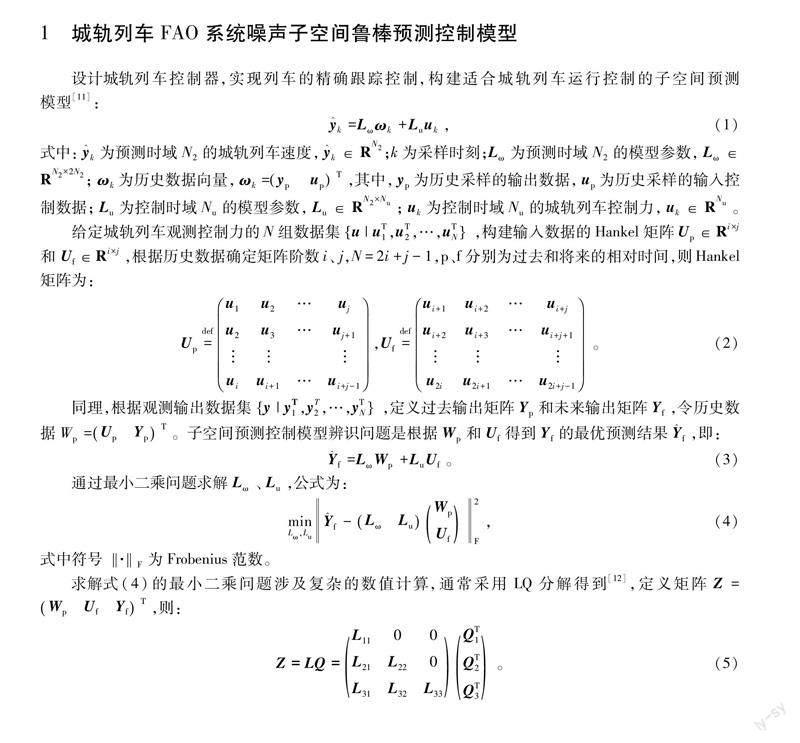
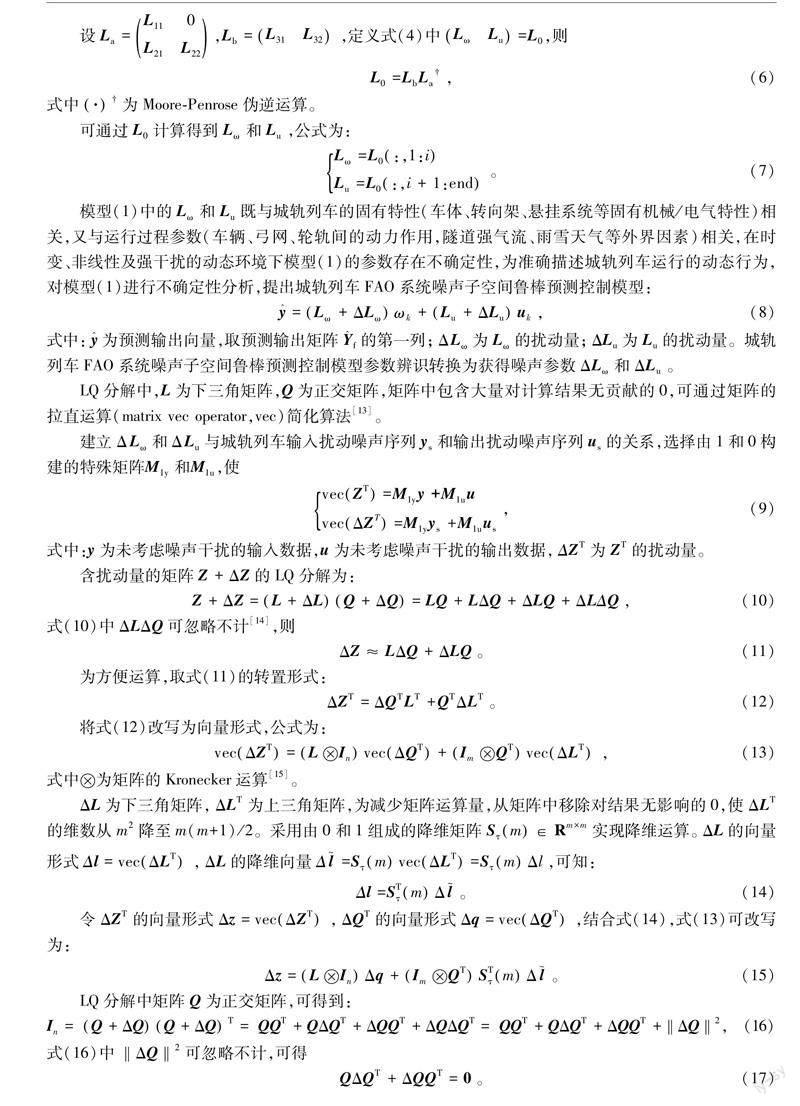
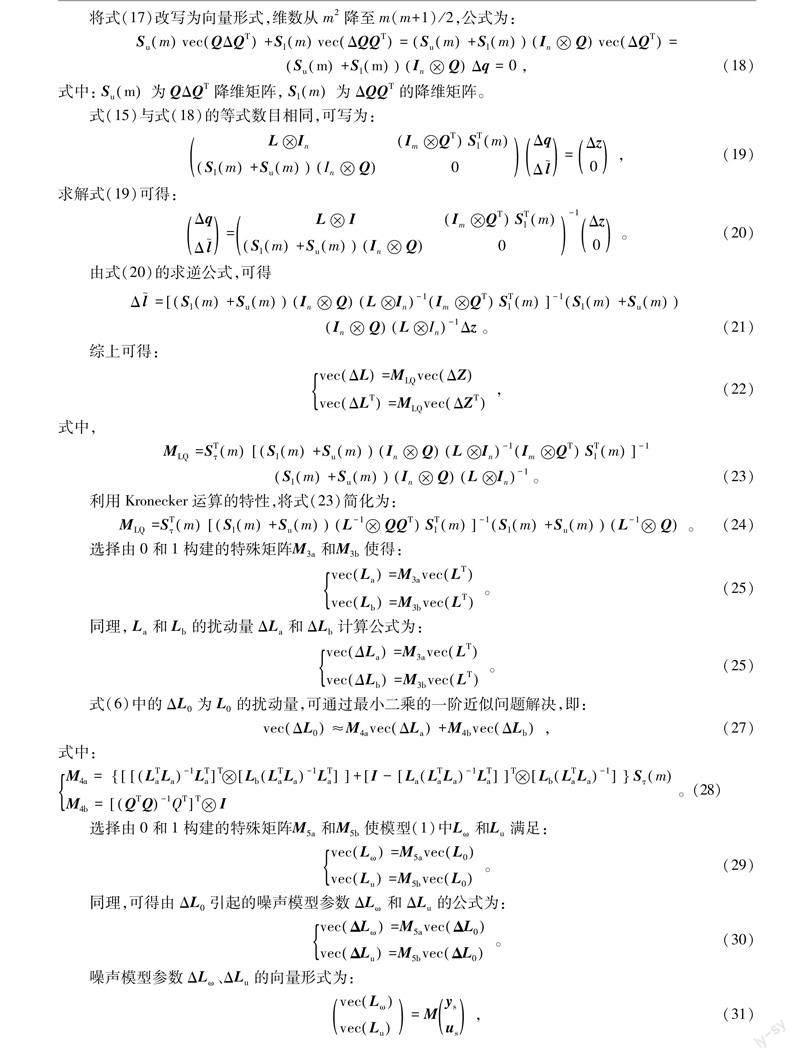
1 城轨列车FAO系统噪声子空间鲁棒预测控制模型
设计城轨列车控制器,实现列车的精确跟踪控制,构建适合城轨列车运行控制的子空间预测模型[11]:
由图2可知:牵引力/制动力在城轨列车启动时变化较大,说明城轨列车启动过程中控制器不断更新城轨列车的历史运行数据,调整控制力以达到较好的跟踪效果。由图3可知:开始时预测速度与试验速度存在较大误差,随后误差逐渐减小,原因是预测结果不断反馈更新历史辨识数据,得到更新后的模型参数,从第5秒开始城轨列车FAO系统噪声空间鲁棒预测控制器的预测速度与试验速度基本一致,说明该控制器的预测精确度较高。
设计城轨列车FAO系统噪声子空间鲁棒预测控制器时,设预测时域N2=5,控制时域Nu=5,将输出矩阵Qy和控制矩阵Qu分别设为单位矩阵,选择随机噪声幅值为0、2、5、10 km/h,进行城轨列车FAO系统噪声子空间鲁棒预测控制器仿真。
不同随机噪声干扰下,城轨列车FAO系统噪声子空间鲁棒预测控制器的速度跟踪仿真如图4所示。计算不同随机噪声干扰下的速度跟踪误差,结果如表2所示。
由图4及表2可知:无噪声干扰时,本文方法和文献[11]方法的速度跟踪误差相同,跟踪效果一致;随噪声幅值的增大,文献[11]方法的跟踪效果明显落后于本文方法,本文方法在有噪声干扰下城轨列车运行控制的鲁棒性较好,噪声幅值为2、5、10 km/h时,速度预测精度比文献[11]方法分别提高3.13%、7.66%、14.21%。速度跟踪误差过大影响城轨列车在全自动运行情况下的停车精确度,降低乘客乘坐的舒适性,甚至可能发生城轨列车超过停车对标范围车门无法打开的事故。
4 结束语
对城轨列车全自动运行系统实际运行中因噪声干扰引起数据变化,导致模型辨识精确度降低的问题,基于传统子空间预测控制模型,设计城轨列车全自动运行系统噪声子空间鲁棒预测控制器,采用最小二乘的一阶近似数值分析方法建立噪声序列与模型的直接关系,通过矩阵拉直运算对模型参数降维以减少算法的运算量,得到城轨列车全自动运行系统噪声子空间鲁棒预测控制器算法。采用软件MATLAB在不同噪声幅值下仿真城轨列车全自动运行系统噪声子空间鲁棒预测控制器的预测精度,结果表明在噪声干扰下城轨列车全自动运行系统噪声子空间鲁棒预测控制器的速度跟踪误差较小,运行控制鲁棒性较好。
参考文献:
[1]郜春海,王伟,李凯,等.全自动运行系统发展趋势及建议[J].都市快轨交通,2018,31(1):51-57.
[2]刘文珍.城市轨道交通全自动列车追踪运行控制优化研究[D].兰州:兰州交通大学,2021.
[3]宁滨,郜春海,李开成,等.中国城市轨道交通全自动运行系统技术及应用[J].北京交通大学学报,2019,43(1):1-6.
[4]中国城市轨道交通协会.城市轨道交通2022年度统计和分析报告[J].城市轨道交通,2023(4):13-15.
[5]张福景,纪东旭,李美华,等.基于无人驾驶环境的列车智能化仿真试验平台研究[J].智慧轨道交通,2022,59(3):35-37.
[6]路向阳,吕浩炯,廖云,等.城市轨道交通全自动驾驶系统关键装备技术综述[J].机车电传动,2018(2):1-6.
[7]仲维锋,徐洪泽.基于控制参数化方法的列车节能操纵优化研究[J].铁道学报,2017,39(6):72-79.
[8]高豪,张亚东,郭进,等.基于动态规划的列车节能操纵优化方法[J].铁道学报,2020,42(8):76-84.
[9]ZHU X M, PU Q, ZHANG Q, et al. Automatic train operation speed profile optimization and tracking with multi-objective in urban railway[J]. Periodica Polytechnica Transportation Engineering,2019,48(1):57-64.
[10]GOODWIN J C , FLETCHER D I, HARRISON R F. A methodology for robust multi-train trajectory planning under dwell-time and control-point uncertainty[J]. Proceedings of the Institution of Mechanical Engineers:Part F:Journal of Rail and Rapid Transit, 2019, 234(6):596-606
[11]颜争,兰清群.城轨ATO系统子空间预测控制方法[J].山东交通学院学报,2022,30(1):35-43.
[12]颜争.高速列车子空间模型辨识与预测控制方法[D].南昌:华东交通大学,2013.
[13]BEBIANO N, DA P. Inverse problems for pseudo-Jacobi matrices:existence and uniqueness results[J].Inverse Problems:An International Journal of Inverse Problems, Inverse Methods and Computerised Inversion of Data, 20127(2):025005.
[14]BOOM V D, HAVERKAMP B. Towards a state-space polytopic uncertainty description using subspace model identification techniques[C]//Proceedings of the American Control Conference,2000. [S.l.]:IEEE, 2000,3:1807-1811.
[15] 吳恒飞,张宗标.爪形矩阵约束四元数矩阵方程A×B=C的求解[J].西昌学院学报(自然科学版),202 35(1):58-61.
A robust subspace predictive control method on noise of
fully autonomous operation system for urban rail train
YAN Zheng, LAN Qingqun
Anhui Communications Vocational & Technical College, Hefei 23005China
Abstract:Based on the historical operation data of urban rail train and fully considering the impact of noise interference during the operation process, a control model containing noise is constructed by subspace identification method to ensure that it can be more consistent with the actual operating state, and the prediction accuracy is higher. Real-time data is continuously added during the control process to iterate the historical data identified by the model, and the model parameters are updated online to obtain a robust subspace predictive controller with strong anti-interference ability. In MATLAB simulation experiments, noise amplitudes of 0, 2, 5, 10 km/h are set and compared with traditional subspace predictive control methods. The results showed that under the interference of random noise, the robust subspace predictive controller for fully autonomous operation (FAO) system of urban rail trains has a high prediction accuracy. When the noise amplitude is 10 km/h, the prediction accuracy improves by 14.21% compared with the traditional subspace prediction controller. The robust subspace predictive control method on noise of fully autonomous operation system for urban rail trains can achieve high-precision tracking of the expected curve of urban rail trains under strong interference operating conditions.
Keywords:urban rail train; FAO system; noise subspace; robust; predictive control
(责任编辑:赵玉真)
收稿日期:2023-05-08
基金项目:安徽高校优秀青年人才计划项目(gxyq2022261);安徽省高等学校省级质量工程项目(2022jyxm310)
第一作者简介:颜争(1987—),男,合肥人,副教授,工学硕士,主要研究方向为控制理论与控制工程,E-mail:120143455@qq.com。
