车辆自适应巡航控制的内秉模态特性
2024-04-12高岩飞程玉虎蒋亨雷任乾明黄雪涛侯庆高杜明洋
高岩飞 程玉虎 蒋亨雷 任乾明 黄雪涛 侯庆高 杜明洋

摘要:为分析车辆自适应巡航控制下的跟驰状态对驾乘舒适性的影响,基于刺激-反应类线性跟驰模型,分别模拟跟驰车在微尺度避撞工况、微尺度扰动工况和全球统一轻型车辆测试循环(world light vehicle test cycle,WLTC)工况的速度-时间图像,采用经验模态分解(empirical mode decomposition,EMD)和快速傅里叶变换(fast Fourier transform,FFT)相结合的时频分析方法提取跟驰车的内秉模态特性,分析低频下不同驾驶工况对驾乘人员舒适性的影响。结果表明:不同驾驶工况的内秉模态频率不同,频率越小,车辆的振幅越大;相较于微尺度避撞工况和扰动工况,WLTC工况的内秉模态频率带宽分布较宽,幅值较高,波动能量较大;WLTC工况下,频率小于0.10 Hz的超低频区的内秉模态幅值较高,人体恶心程度较严重,对运动病的贡献较大。
关键词:跟驰模型;自适应巡航控制;EMD;FFT;内秉模态特性
中图分类号:U471.15文献标志码:A文章编号:1672-0032(2024)01-0007-08
引用格式:高岩飞,程玉虎,蒋亨雷,等.车辆自适应巡航控制的内秉模态特性[J].山东交通学院学报,2024,32(1):7-14.
GAO Yanfei, CHENG Yuhu, JIANG Henglei, et al. Intrinsic modal characteristics of vehicle adaptive cruise control[J].Journal of Shandong Jiaotong University,2024,32(1):7-14.
0 引言
随人工智能技术和信息技术的发展,汽车智能化、网联化趋势愈加明显,智能驾驶技术在解决交通拥堵、提高驾驶安全性等方面有较大优势[1]。学者们通过分析车辆的跟驰方式和交通流特性,建立描述微观车辆间最基本行为的车辆跟驰模型,应用在城市交通流分析、交通安全评价和无人驾驶等领域[2-3]。跟驰模型能衔接中观、宏观交通流理论,在微观交通数字仿真、道路通行能力分析、交通安全评价、交通规划、自适应巡航控制方面有重要意义,对制定交通管理相关政策有重要参考价值[4]。
配备自适应巡航控制系统的车辆不断增加,车辆自动跟驰驾驶策略日益优化,车辆行驶安全性及通行效率不断提高[5]。长时间驾乘车辆易引发驾驶疲劳和晕车等运动病[6]。自适应巡航控制系统工作时难以考虑驾乘人员的乘车体验,不同驾驶策略对驾乘人员的身体和心理健康有不同影响[7]。Donohew等[8]研究发现,低频的时序频率和幅值对人体健康有不良影响,频繁的位移波动会增大运动病的诱发几率,降低乘车舒适性;Kamiji等[9]建立晕车发病率预测模型,可预测轻度恶心的分布特征。
分析跟驰模型的时域、频域动力学性能方法包括劳思-赫尔维茨稳定判据、奈奎斯特稳定判据、霍普夫分岔、李雅普诺夫准则、直接传递函数法、拉普拉斯变换法、根轨迹法等[10-11]。Sun等[12]基于奈奎斯特稳定判据,将闭环系统转换为开环系统,根据扰动增长率确定有时间延迟的跟驰模型闭环系统的稳定性;Kamath等[13]基于经典跟驰模型和最优速度跟驰模型研究交通流局部稳定性的条件,认为交通流通过霍普夫分岔发生从局部稳定状态到不稳定状态的转变;Li等[14]基于李雅普诺夫准则分析跟驰模型的局部稳定性和渐近稳定性;Han等[15]采用线性系统理论和拉普拉斯变换推导闭环传递函数,构建基于比例积分微分(proportional integral derivative,PID)控制的跟驰模型;Sau等[16]采用根轨迹法分析跟驰模型和协作跟驰模型的队列稳定性条件。目前,交通流研究多集中于建立模型或提出策略分析和解决交通问题,构建车辆跟驰模型时主要关注交通流内部的影响因素,较少考虑交通流对驾乘人员舒适性的影响,对跟驰模型在时域、频域下频谱分布模态特性的研究较少。模态特性分析广泛应用在结构振动系统及电力系统等领域[17]。时域分析主要研究信号在时间轴上的变化特性,頻域分析将信号从时域转换到频域,表示为信号的频率分量,从信息和数学的角度理解信号的频谱特性[18-20]。跟驰模型为非线性二阶系统,呈现二阶系统的共性,对跟驰模型进行频谱分析可行。采用有全局性质的傅里叶频域分析法分析驾驶动态过程,不具备时间和频率的定位功能,无法表征驾驶过程的非平稳信号;有叠加性质的傅里叶分析方法适用于频率不随时间变化的系统,且不具有物理可解释性,无法提取内秉固有的时频模态特性;快速傅里叶变换(fast Fourier transform,FFT)选择分析窗口时主观性较强[21];小波变换广泛应用于非平稳信号处理中,但小波基的选取主观性较强[22]。经验模态分解(empirical mode decomposition,EMD)根据自身时间尺度特征分解信号,得到时域基函数,处理非平稳及非线性信号序列时有较高的信噪比,在提取机械结构系统的非平稳信号特征领域广泛应用[23-24]。采用FFT进一步分析EMD后的函数,可得到有内秉时变特性的频谱模态特性[25]。
为分析车辆跟驰状态的内禀特性及对驾乘人员生理健康的影响,本文模拟车辆在不同驾驶工况下的跟驰行为,采用EMD与FFT 2种信号处理方法分解不同驾驶工况下跟驰车的速度-时间图像,提取跟驰行为的内秉模态特征,分析不同驾驶工况时车辆的低频振动特征,及其对人体运动病的影响,为提高智能车辆自适应巡航控制策略的舒适性提供参考。
1 跟驰模型
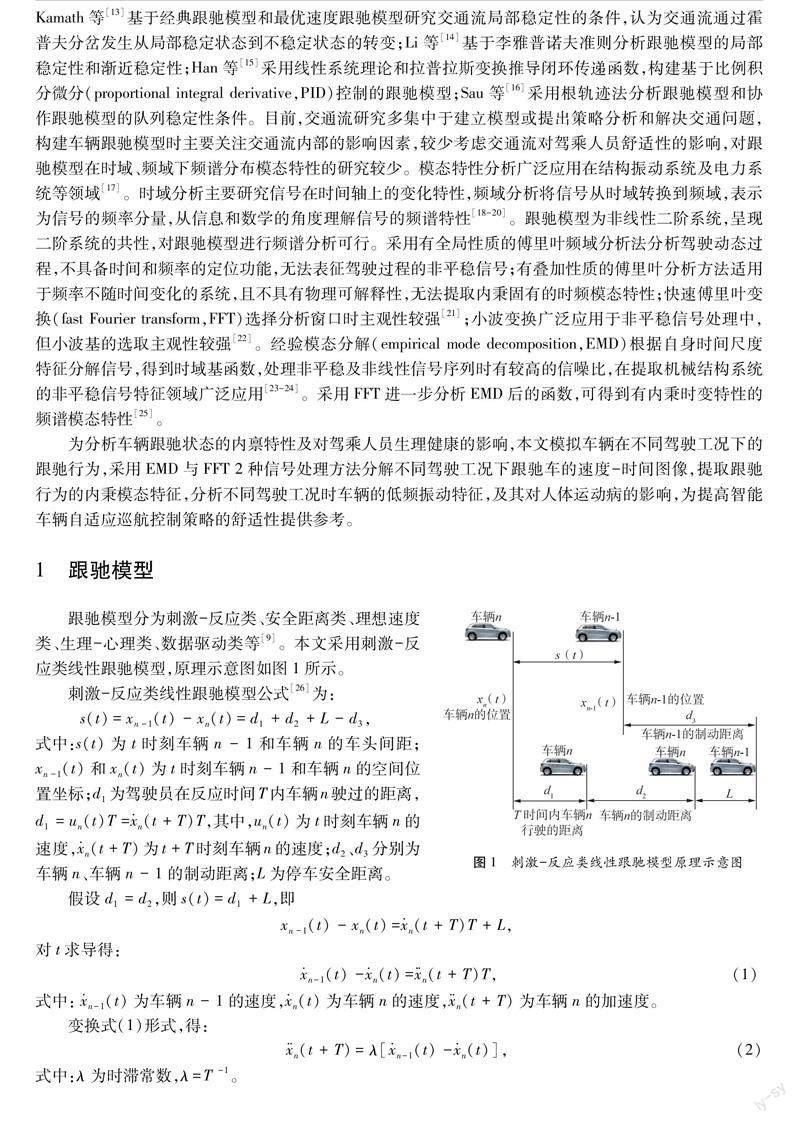
跟驰模型分为刺激-反应类、安全距离类、理想速度类、生理-心理类、数据驱动类等[9]。本文采用刺激-反应类线性跟驰模型,原理示意图如图1所示。
刺激-反应类线性跟驰模型公式[26]为:
为解决跟驰模型忽略最小安全距离和导出的流量-密度、速度-密度与实际不符的问题,将时滞常数修正为非线性时滞函数,式(2)改写为:
式中:al,m为常数,l、m为标定参数。
跟驰状态下车辆的行驶有制约性、延迟性和传递性。制约性主要体现在车速和车距2方面,跟驰车的车速受前、后车影响,不能长时间比前车的速度大,也不能長时间比后车的速度小,否则易出现追尾等事故,需在合适的范围灵活调整车速;跟驰车要与前、后车保持恰当距离,距离太远无法构成跟驰状态,距离太近,一旦前车紧急刹车,跟驰车会因反应不及时而追尾,跟驰车根据具体情景合理地调整与前车的距离,保留紧急制动时的最小安全距离。延迟性是指跟驰状态下,当前车的速度变化时,跟驰车有一定的反应时间,如果前车改变速度,跟驰车会在T时刻后改变速度。传递性体现在由多辆车组成的车队中,前车加速时,后车随之加速,以此类推逐渐影响整个车队,在不发生交通事故的前提下,对第1辆车的影响依次传递到后续车辆,但影响效果逐渐减弱。
2 车辆驾驶工况
车辆有多种驾驶工况,本文主要考虑3类:第1类是微尺度避撞工况,在跟车过程中,前车突然停车,后车为避免追尾而减速或停车;第2类是微尺度扰动工况,后车根据前车速度相应的调整速度;第3类是大尺度统计工况,如全球统一轻型车辆测试循环(world light vehicle test cycle,WLTC)工况。
2.1 微尺度避撞工况
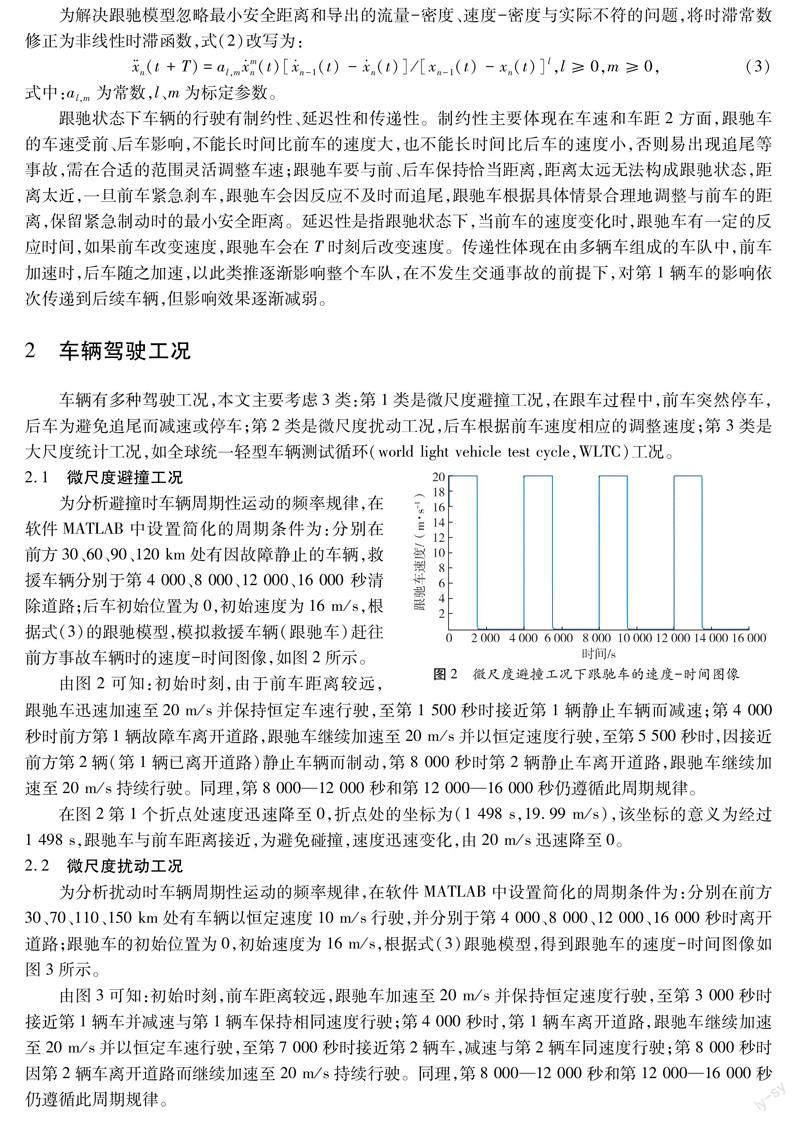
为分析避撞时车辆周期性运动的频率规律,在软件MATLAB中设置简化的周期条件为:分别在前方30、60、90、120 km处有因故障静止的车辆,救援车辆分别于第4 000、8 000、12 000、16 000 秒清除道路;后车初始位置为0,初始速度为16 m/s,根据式(3)的跟驰模型,模拟救援车辆(跟驰车)赶往前方事故车辆时的速度-时间图像,如图2所示。
由图2可知:初始时刻,由于前车距离较远,跟驰车迅速加速至20 m/s并保持恒定车速行驶,至第1 500秒时接近第1辆静止车辆而减速;第4 000秒时前方第1辆故障车离开道路,跟驰车继续加速至20 m/s并以恒定速度行驶,至第5 500秒时,因接近前方第2辆(第1辆已离开道路)静止车辆而制动,第8 000秒时第2辆静止车离开道路,跟驰车继续加速至20 m/s持续行驶。同理,第8 000—12 000秒和第12 000—16 000秒仍遵循此周期规律。
在图2第1个折点处速度迅速降至0,折点处的坐标为(1 498 s,19.99 m/s),该坐标的意义为经过1 498 s,跟驰车与前车距离接近,为避免碰撞,速度迅速变化,由20 m/s迅速降至0。
2.2 微尺度扰动工况
为分析扰动时车辆周期性运动的频率规律,在软件MATLAB中设置简化的周期条件为:分别在前方30、70、110、150 km处有车辆以恒定速度10 m/s行驶,并分别于第4 000、8 000、12 000、16 000秒时离开道路;跟驰车的初始位置为0,初始速度为16 m/s,根据式(3)跟驰模型,得到跟驰车的速度-时间图像如图3所示。
由图3可知:初始时刻,前车距离较远,跟驰车加速至20 m/s并保持恒定速度行驶,至第3 000秒时接近第1辆车并减速与第1辆车保持相同速度行驶;第4 000秒时,第1辆车离开道路,跟驰车继续加速至20 m/s并以恒定车速行驶,至第7 000秒时接近第2辆车,减速与第2辆车同速度行驶;第8 000秒时因第2辆车离开道路而继续加速至20 m/s持续行驶。同理,第8 000—12 000秒和第12 000—16 000秒仍遵循此周期规律。
跟驰车为追上前车,在短时间内加速到最大速度,当前、后车距离接近时,为避免追尾,后车速度减小。当车速小于10 m/s时,后车车速迅速增至10 m/s,并保持该速度行驶。此时前、后车速度均为10 m/s,在道路上稳定跟驰。
2.3 WLTC工况
由污染与能源工作组根据世界不同地区的真实驾驶数据,结合适当的加权因子,将收集的轻型车辆的驾驶数据和交通统计数据作为制定工况的基本要素,提出WLTC工况,可描述全球轻型车辆驾驶行为的驾驶周期,WLTC工况汇集约76.5 万km行驶里程的驾驶数据,涵盖广泛的车辆类别、道路类型和驾驶条件[27]。WLTC工况包含3个驾驶循环集合,覆盖不同驾驶条件下的车速、行驶距离和加速度等情况,能准确地模拟车辆在实际道路上的行驶情况。
WLTC工况的前、后车参数设置为:前车遵循WLTC工况行驶,跟驰车根据式(3)的跟驰模型行驶。运行程序后得到跟驰车的速度-时间图像如图4所示。
由图4可知:WLTC工况包括低速行驶工况、中速行驶工况、高速行驶工况和超高速行驶工况,4个工况的最高车速分别为15.7、21.3、27.1、36.5 m/s。WLTC工况考虑刹车、短暂停车等情况,没有周期性的加速、减速,车速波动大、怠速工况少,能更好地体现真实驾驶场景中车速时快时慢的场景。
3 驾驶行为特征的信息处理分析
本文通过EMD和FFT 2种信息处理方法分解3种驾驶工况下跟驰车辆的速度-时间图像,提取内秉时频特征,分析不同驾驶工况对驾乘人员舒适性的影响。
3.1 EMD
EMD方法具有完备性、正交性和自适应性的特点,通过筛分得到多阶内禀模态函数(intrinsic mode function,IMF),经Hilbert变化得到解析函数,通过内在特征时间尺度获取内秉波动模式。提取的IMF须满足2个特征条件:局部极值点和过零点数目相等或最多相差1个;局部最大值的包络线(上包络线)和局部最小值的包络线(下包络线)的平均包络线为0。
基于样条差值包络线的逼近,通过筛选,可辨识细小的信号特征和波动模式。各阶IMF包含不同的特征时间尺度,第i阶IMF瞬时频率的分辨率
式中:fimax為第i阶IMF的最高频率,N为采样点数。
EMD以变频率和幅值的谐波函数为基函数,为保证正交性,将残余项表示为第i+1阶IMF,则数据信号
式中:ci(t)为第i阶IMF,n为提取的IMF的数量。
对式(4)取平方得:
识别x(t)的局部极值点,将所有极值点用3次样条曲线拟合上极值点的包络线emax(t)和下极值点的包络线emin(t),上、下包络线的平均包络线m(t)=emax(t)+emin(t)/2。第1个IMF的分量h(t)=x(t)-m(t),根据IMF分量的2个特征条件判断h(t)是否为正确的IMF,否则以h(t)代替x(t),重复以上步骤,直到h(t)满足判据,则h(t)即为需提取的IMF,定义为c1(t)。新的数据信号r(t)=x(t)-h(t),用r(t)作数据源,重复以上步骤,直到数据信号剩余部分是单调序列或常值序列。最后得到n个ci(t)和1个残余分量r(t),关系式为:
为避免过度分解破坏数据信号的物理信息,通过仿柯西收敛准则确定分解次数
非周期工况需延拓为周期信号。以WLTC工况为例,延拓3倍WLTC工况构成周期工况,经EMD分解得到若干IMF和余量,如图5所示。选择周期性较好的c1(t)~c6(t) 6个IMF表征内禀模态。
3.2 FFT
微尺度避撞行为工况和微尺度扰动工况有相似的特征,可一起采用EMD进行分解后再进行FFT。采用FFT对不同驾驶工况下的c1(t)~c6(t)进行连续正逆变换,得到c1(t)~c6(t)的频域图,整合频域图,得到不同驾驶工况的速度的振幅-频率曲线,如图6所示。
由图6可知:不同的驾驶工况有不同的内秉模态频率,内秉模态频率较小时车辆的振幅较大,车辆的振幅随内秉模态频率的增大而减小;相较于微尺度避撞行为工况和扰动工况,WLTC工况的内秉模态频率带宽分布较宽,幅值较高,波动能量较大。
人体各器官的固有频率不同,当人体受到的振动频率在某一固有频率附近时产生共振,影响人体健康。长期处在低频噪声环境中,人体会出现面色苍白、周身发热、疲惫无力、面无表情、食欲不振、手指颤抖等症状,同时伴随恶心、呕吐。人体的恶心程度与频率的关系为[8]:当振动频率为0.01~0.10 Hz时,人体的恶心程度随频率的增大逐渐严重,频率为0.10~1.00 Hz时,人体的恶心程度随频率的增大而减轻。
3.3 信号处理结果分析
车辆振动源主要来自路况不平和发动机的振动等,人体的内脏器官易与车辆的振动产生共振,危害驾乘人员的身体健康。当振动频率小于1.00 Hz时,易由低频噪声引起运动病,使人感到恶心、呕吐、昏昏欲睡等。
WLTC工况中的内秉模态频率小于0.10 Hz和大于0.10 Hz时呈不同的规律,可分为超低频区和低频区。在频率小于0.10 Hz的超低频区的内秉模态幅值较高,人体恶心程度较严重,对运动病的贡献较大,尽管随频率的减小,恶心程度减轻,对驾乘人员内脏器官的共振影响降低,但此时的内秉模态幅值和相应能量较大,恶心程度降低不明显;在频率高于0.10 Hz的低频区,内禀模态幅值较小,恶心程度降低。综上,在内秉模态的耦合影响下,驾驶过程中驾乘人员的恶心程度随内秉模态频率的减小而增大,更易诱发运动病。在规划微观交通行为时,为保证驾乘人员的健康,需适当提高低频区的频率。
4 结论
为分析驾驶行为对驾乘人员的生理影响,本文采用跟驰模型模拟跟驰车在微尺度避撞工况、微尺度扰动工况和WLTC工况下的速度-时间曲线,通过经验模态分解和快速傅里叶变换分解不同工况的数据信号,得到不同驾驶工况的内秉模态特性,分析内秉模态特性的频率与驾乘人员恶心程度的关系。结果表明:WLTC工况的内秉模态频率带宽分布较宽,幅值较高,波动能量较大;在频率小于0.10 Hz的超低频区的人体恶心程度较严重,内秉模态幅值较高,对运动病的贡献较大;在频率高于0.10 Hz的低频区,内禀模态幅值较小,恶心程度降低。在确保安全的基础上,应尽可能提高低频下变速频率,减轻驾乘人员的恶心程度,提高乘车舒适性。
参考文献:
[1]李明俊.智能驾驶车辆人机协同控制策略研究[D].长沙:湖南大学,2021.
[2]HUANG T. Research on the use intention of potential designers of unmanned cars based on technology acceptance model[J].PLoS One,2021(8):e0256570.
[3]TREIBER M, HENNECKE A, HELBING D. Congested traffic states in empirical observations and microscopic simulations[J].Physical Review E:Statistical Physics, Plasmas, Fluids, and Related Interdisciplinary Topics, 2000,62(2):1805-1824.
[4]MAHDINIA I, ARVIN R, KHATTAK A J, et al. Safety, energy, and emissions impacts of adaptive cruise control and cooperative adaptive cruise control[J].Transportation Research Record: Journal of the Transportation Research Board, 2020,2674(6):253-267.
[5]MEIER J N, KAILAS A, ABUCHAAR O, et al. On augmenting adaptive cruise control systems with vehicular communication for smoother automated following[J].Transportation Research Record: Journal of the Transportation Research Board, 2018,2672(22): 67-77.
[6]于瀚.汽車智能驾驶技术将走向何方?[J].汽车与配件,2022(9):40-41.
[7]GONG X X, GE W G, YAN J, et al. Review on the development, control method and application prospect of brake-by-wire actuator[J].Actuators,2020,9(1):15.
[8]DONOHEW B E, GRIFFIN M J. Motion sickness: effect of the frequency of lateral oscillation[J].Aviation, Space, and Environmental Medicine, 2004,75(8):649-656.
[9]KAMIJI N, KURATA Y, WADA T, et al. Modeling and validation of carsickness mechanism[C]//SICE Annual Conference 2007.Takamatsu, Japan: IEEE, 2007:1138-1143.
[10]PARASKEVOPOULOS P N. Modern control engineering[M].Boca Raton, FL, USA: CRC Press, 2017.
[11]ASTRM K J, MURRAY R M. Feedback systems: an introduction for scientists and engineers[M].Princeton, New Jersey, USA:Princeton University Press, 2010.
[12]SUN J, ZHENG Z, SUN J. Stability analysis methods and their applicability to car-following models in conventional and connected environments[J].Transportation Research Part B: Methodological, 2018,109:212-237.
[13]KAMATH G K, JAGANNATHAN K, RAINA G. Car-following models with delayed feedback: local stability and Hopf bifurcation[C]//2015 53rd Annual Allerton Conference on Communication, Control, and Computing (Allerton). Monticello, IL, USA:IEEE, 2015:538-545.
[14]LI Y F, ZHU H, CEN M, et al. On the stability analysis of microscopic traffic car-following model: a case study[J].Nonlinear Dynamics,201 74:335-343.
[15]HAN S, ZHANG J, YANG Q, et al. Car-following traffic model based on PID control: modelling and simulation[J].Engineering Computations, 2022,39(10):3400-3415.
[16]SAU J, MONTEIL J, BILLOT R, et al. The root locus method: application to linear stability analysis and design of cooperative car-following models[J].Transportmetrica B, 2014,2:60-82.
[17]DO T, VU V, LIU Z. Linearization of dynamic equations for vibration and modal analysis of flexible joint manipulators[J].Mechanism and Machine Theory: Dynamics of Machine Systems Gears and Power Trandmissions Robots and Manipulator Systems Computer-Aided Design Methods, 2022,167:104516.
[18]BROUGHTON S A, BRYAN K. Discrete fourier analysis and wavelets: applications to signal and image processing[M].Hoboken, New Jersey, USA:John Wiley & Sons,2018.
[19]KAHANER D. Matrix description of the fast Fourier transform[J].IEEE Transactions on Audio and Electroacoustics, 1970,18(4):442-450.
[20]NUSSBAUMER H, QUANDALLE P. Fast computation of discrete Fourier transforms using polynomial transforms[J].IEEE Transactions on Acoustics, Speech, and Signal Processing, 1979, 27(2):169-181.
[21]NUSSBAUMER H J. The fast Fourier transform[M].Berlin, Germany: Springer Berlin Heidelberg, 1982.
[22]GUO T, ZHANG T P, LIM E, et al. A review of wavelet analysis and its applications: challenges and opportunities[J].IEEE Access, 2022, 10:58869-58903.
[23]NUNES J C, DELCHELLE E. Empirical mode decomposition: applications on signal and image processing[J].Advances in Adaptive Data Analysis, 2009,1(1): 125-175.
[24]OBERLIN T, MEIGNEN S, PERRIER V. An alternative formulation for the empirical mode decomposition[J].IEEE Transactions on Signal Processing, 2012, 60(5): 2236-2246.
[25]REN L, GONG C. Ringing frequency extraction method based on EMD and FFT for health monitoring of power transistors[J].Journal of Power Electronics, 2019,19(1):307-315.
[26]于雷,宋国华.城市交通流理论[M].北京:北京交通大学出版社,2016.
[27]TUTUIANU M, BONNEL P, CIUFFO B, et al. Development of the world-wide harmonized light duty test cycle (WLTC) and a possible pathway for its introduction in the European legislation[J].Transportation Research Part D: Transport and Environment, 2015,40:61-75.
Intrinsic modal characteristics of vehicle adaptive cruise control
GAO YanfeiCHENG YuhuJIANG Henglei2, REN Qianming
HUANG XuetaoHOU QinggaoDU Mingyang3
Abstract:To investigate the influence of car-following status on driving comfort, a stimulus-response linear car-following model is used to simulate the speed trajectory of the following vehicle under the working conditions of microscale collision avoidance behavior, microscale disturbance behavior, and the world light vehicle test cycle (WLTC). A time-frequency analysis method combining both the empirical mode decomposition (EMD) and fast Fourier transform (FFT) is adopted to extract the intrinsic modal characteristics of car-following behavior, and analyze the impact of different driving conditions on the comfort of drivers and passengers at low frequencies. The results show that the frequency of the intrinsic modal is different in different driving conditions, and the smaller the frequency is, the greater the amplitude of the vehicle is. Compared to the microscale collision avoidance condition and disturbance condition, the frequency bandwidth distribution of the intrinsic vibration mode in the WLTC condition is wider, and the amplitude is also higher with larger fluctuation energy. Under the WLTC working conditions, the amplitude of the intrinsic modal in the ultra-low frequency range with the frequency less than 0.10 Hz is higher, and the degree of nausea in the human body is more severe, which makes a greater contribution to motion sickness.
Keywords:car-following model; adaptive cruise control; EMD; FFT; intrinsic modal characteristics
(責任编辑:赵玉真)
收稿日期:2023-06-05
基金项目:山东省自然科学基金面上项目(ZR2021MB027);山东省高等学校青创科技支持计划项目(2021KJ039;2020KJB002)
第一作者简介:高岩飞(1986—),男,山东临沂人,副教授,工学博士,主要研究方向为车路协同、智慧交通,E-mail:gaoyanfei.0402@163.com。
