水电站高程控制网复测分析
2024-04-10郑辉谭彩虹
郑辉 谭彩虹
(广东省地质测绘研究院有限公司,广东 广州 510800)
1 引言
我国水能资源蕴藏量、可开发的水能资源量均居世界第一位[1]。水电站是国家重要的基础设施,具有建设成本高、对生态影响大、产生的收益高等显著特点[2],在建设和运营过程中,必须实施安全监测[3],通过监测大坝外部点位变形情况,为安全预防和变形分析提供参考[4]。水电站高程控制网是高程监测的基准,控制网基准点一般选在地质条件好、基岩坚硬、远离断层的稳定点位,但受到周期性水位变化[5]和水电站大坝未进入稳定期[6]等因素影响,基准点也存在位移可能[7,8]。因此在实施变形监测前,需对控制网进行复测[9],并对点位稳定性进行分析,从而保证后期变形监测的可靠性[10]。平均间隙法和单点位移分量法是工程中常用的点位稳定性分析方法,本文以某抽水蓄能电站为例,实施了高程控制网国家一级水准网复测,并采用数理统计方法对基准点稳定性进行了分析,研究内容和方法可为相关工程应用提供参考。
2 点位稳定性分析方法
2.1 平均间隙法
平均间隙法将不同观测周期的观测数据看作对同一观测网的连续两次观测,为判断是否存在不稳定点,先进行两期观测的图形一致性检验,即整体检验。若整体检验通过,则认为该网型不存在不稳定点,否则,就说明存在不稳定点。相关推算结果如下:
某监测网完成第j期和第i期观测后,将两期观测数据按同一基准进行平差,求得网点位移向量和其协因数阵Qd。根据点的坐标变化值d=Hj-Hi,进一步求得单位权方差估值:
公式(1)中,pd为d的权阵,且pd=Qd-1,fd为独立d的个数。对单位权方差进行同一性检验,通过检验后,进一步求得综合 方差估值:
公式(2)中,P为观测值改正数权矩阵,V为观测值改正数列矩阵,f为第i、j期多余观测总数,进一步可得:
公式(3)中,T是一个以自由度为f和fd的F 分布变量。在一致性检验中,若T<F(α,fd,f),则接受原假设,表明监测网点都是稳定的。反之,则认为网中存在不稳定点。接下来采取分块间隙法寻找不稳定点,将d 和P 分解为不稳定点与稳定点两部分:
公式(4)中,M、F 分别表示动点与稳定点。令:
若FF ≤F( fF,f0 ),认为上述分块正确。反之,说明上述分块不正确,稳定点的分块中还有动点。需要剔除其中位移量最大的点,然后重新进行上述检验,直到完全通过为止[11]。
2.2 单点位移分量法
该方法认为在先验方差因子σ02已知条件下,应先进行整体检验,其检验统计量如下:
若T>F(α;fd,∞)σ,则认为存在不稳定点[12],构造位移分量检验统计量如下:
公式(8)中,ei 是一向量,以说明需要检验的i点在某一方向上的位移分量。若则认为i点是动点。如果存在多个ωi满足公式(8),则认为值最大的为动点,需将它从监测网中剔除,然后重新检验,直到通过为止。
3 工程概况
某抽水蓄能电站是国家“十三五”规划重点建设工程,由上水库、输水系统、地下厂房、地面开关站及下水库等建筑物组成,总装机容量为1500 MW,设计年发电量25.125 亿kwh。电站上水库主要水工建筑物有主坝和副坝,均为钢筋混凝土面板堆石坝,坝顶高程679.20 m,上库总库容1294 万m3,水电站俯瞰图如图1 所示。为给上水库大坝变形监测提供统一基准,前期设计了上水库监测控制网,采用1985 国家高程基准,并完成了控制网初测。2022 年10 月,对该控制网进行复测。

图1 水电站
4 控制网复测
4.1 控制点网形
按照设计图,高程控制网由6 个基准点和24 个工作基点组成,具体如图2 所示。6 个基准点组成2 个基点组,相距35m ,位于上下库连接公路1 号洞顶公路外侧基岩上 ,距离副坝顶约1.5km。24 个工作基点分别是10 个主坝垂直位移监测工作基点、8 个副坝垂直位移监测工作基点和6 个环库公路上的工作基点。
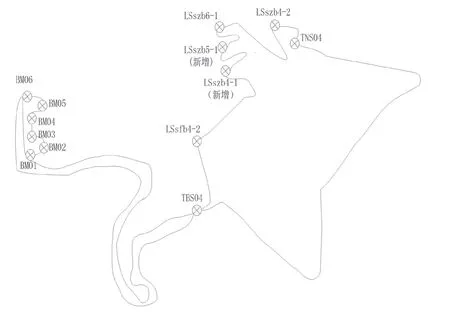
图2 高程控制点网形
鉴于本次测量时坝区仍在施工,部分工作基点尚未建造,有1 个点被掩埋,因此,本次观测的高程控制网由6 个基准点、5 个工作基点和2 个水平位移工作基点(墩底水准点)组成,如图2 所示。6 个基准点为BM01~BM06,标石类型为基岩标。5 个工作基点分别是4 个主坝垂直位移监测工作基点(LSszb4-1、LSszb5-1、LSszb6-1、LSszb4-2)和1 个副坝垂直位移监测工作基点(LSsfb4-2),标石类型为基岩标;2 个水平位移工作基点(墩底水准点)为TBS04 和TNS04,标石类型为混凝土普通水准标石。
4.2 控制网观测
高程控制网观测采用Leica DNA03 精密电子水准仪配备铟瓦条形码水准尺及5kg 重的尺垫测量,水准仪标称精度为±0.3mm/km,最大测程是60m,最小测程是1.8m。每天出测前进行水准仪i 角检验,并进行i 角自动改正[13]。结合测区地形条件、道路交通状况,确定观测路线以BM01、BM02、BM03、BM04、BM05、BM06 和BM01 构成一个小闭合环,以BM01、TBS04、BM06 和BM01 构成一个中闭合环,以TBS04、TNS04、LSszb4-2、LSszb6-1、LSszb5-1、LSszb4-1、LSsfb4-2 和TBS04 构成一个大闭合环,三个闭合环通过结点联结组成上水库高程控制网,其中BM01 点为该控制网的高程起算点,起算值同第一期一致。
高程控制网按国家一等水准技术要求施测,观测技术指标按表1 控制。测量中各个测段按偶数站设站,均进行往返测量。水准网外业观测数据由仪器自动记录在随机存储卡中。测量时严格遵守以下测量模式 :往、返测奇数站照准标尺顺序为“后前前后”,往、返测偶数站照准标尺顺序为“前后后前”。测站限差设置由仪器自动检验,具体设置为 :( 1)视线长度≥4m 且≤30m ;( 2)前后视距差≤1.0m ;( 3)任一测站前后视距累积≤3.0m ;( 4)视线高度≥0.65m 且≤2.8m ;( 5)重复测量次数≥3 次;( 6)两次高差之差≤0.4mm。

表1 高程网观测技术要求(单位:m m)
4.3 控制网平差
以BM01 点作为高程控制网的起算基准点,高程控制网的平差使用科傻软件计算。各测段观测高差首先经尺长改正计算,水准测量概算结果如表2 所示。
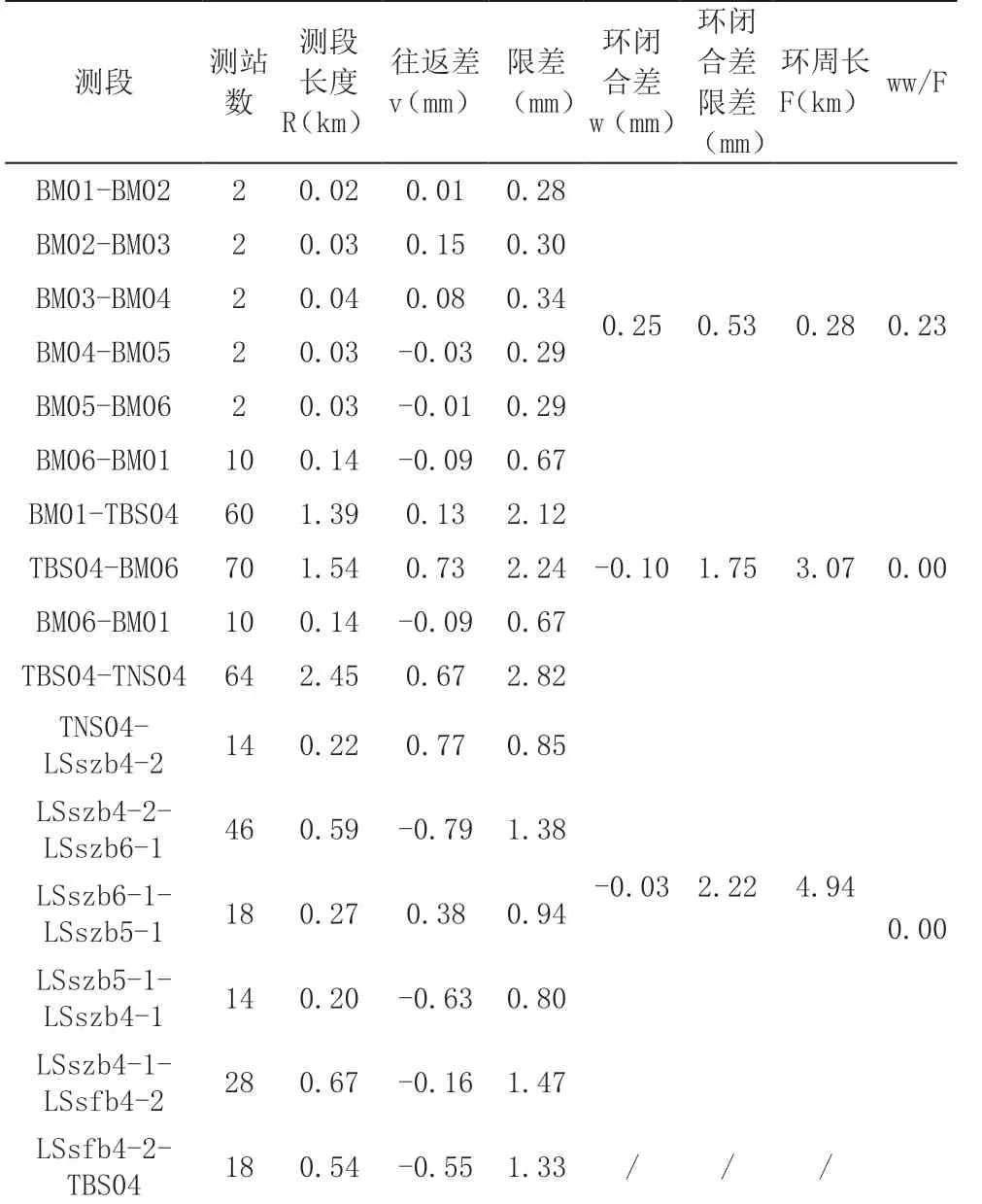
表2 高程控制网一等水准测量计算
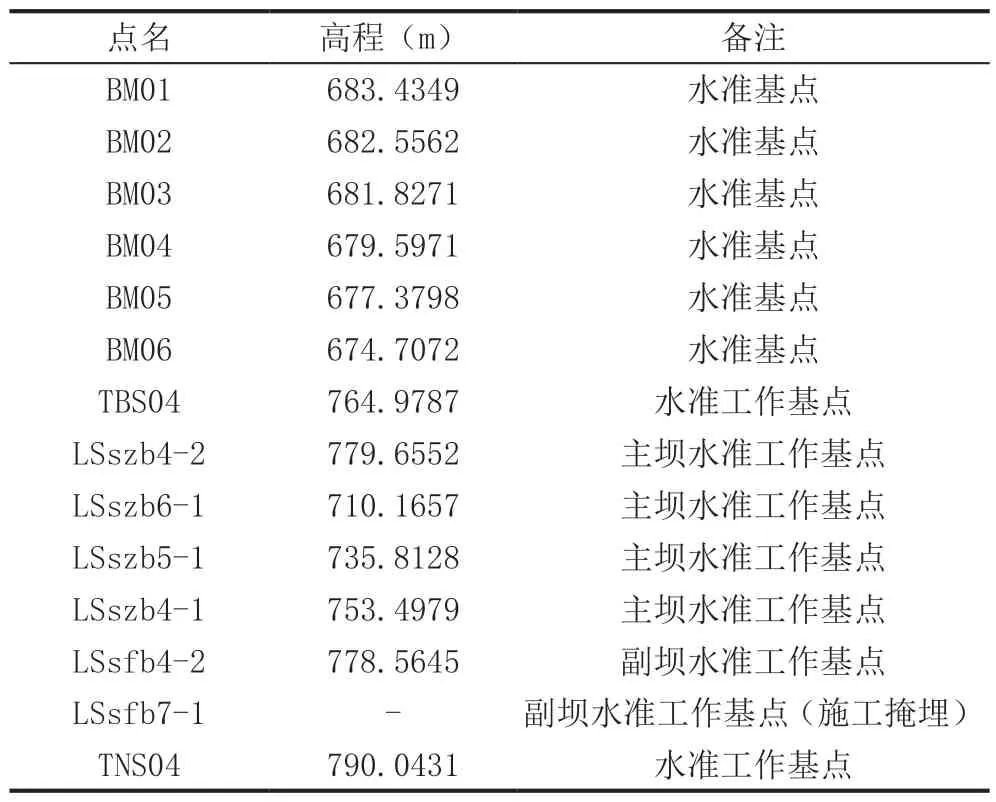
表3 水电站高程监测网成果
5 点位稳定性分析
分别采用平均间隙法和单点位移分量法对观测结果进行点位稳定性分析。分析时以本期观测结果为当前值,利用数理统计原理与首期观测成果的差异量作变形分析。对各待定点的稳定性分别利用两种方法检验,即动点检验和单点检验,动点检验采用平均间隙法[11],单点检验采用单点位移分量法[12],检验过程中显著性水平取0.05[14],检验结果统计如表4 所示。
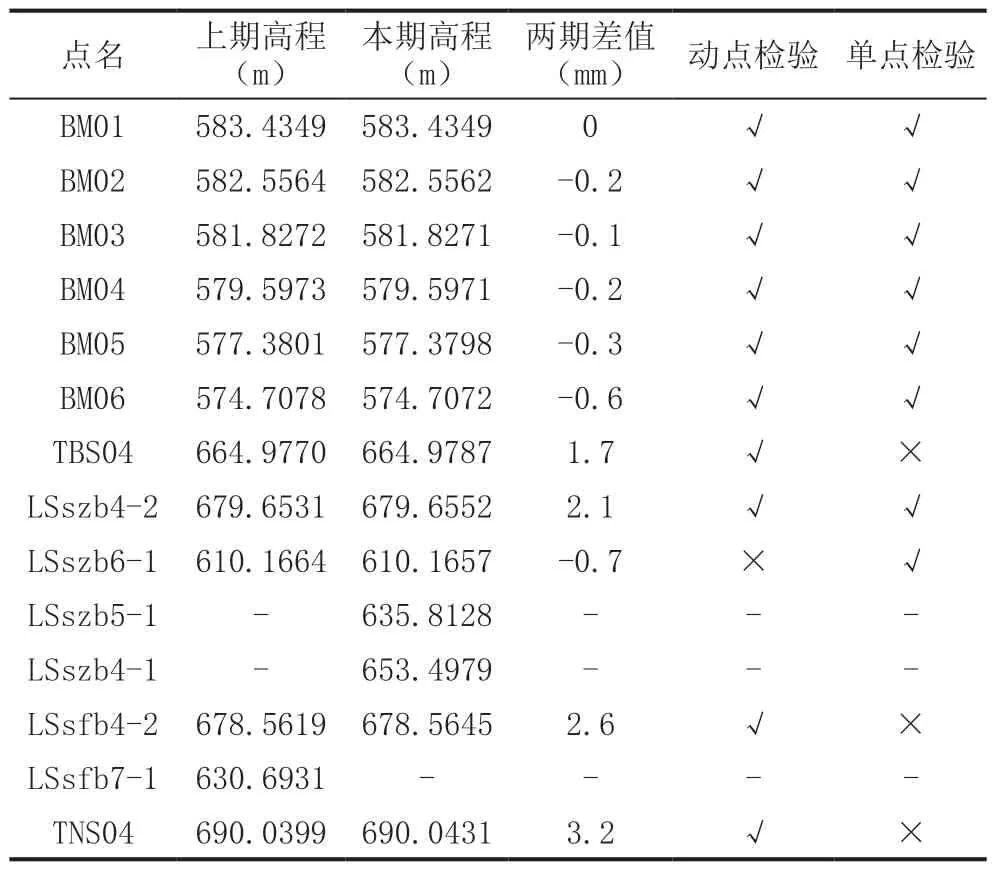
表4 各点高程稳定性检验结果
从表4 可以看出,本期LSszb6-1 点未通过动点检验,但通过了单点检验;而TBS04、LSsfb4-2、TNS04点通过了动点检验,而未通过单点检验,且沉降变化均为正,可能有少量位移。由于目前仅有两期观测,水库蓄水尚未到位,对工作基点的影响规律还无法掌握,因此,点位的稳定性有待经过多期观测来进一步确定。
本次复测均按照审批的《观测方案》和相关规范的技术标准执行,各项技术指标达到规范要求,因此,监测成果可靠。依据稳定性判断,高程控制点中TBS04、LSsfb4-2、TNS04 点有较小沉降,相对于上一期,最大高程变化量为3.2 mm。考虑到本期有新埋设点,建议采用本期数据成果作为今后日常监测的基准。
6 结束语
基准网复测对精度要求极高,通过点位稳定性分析能够判定点位位移究竟是测量误差引起还是发生了实际位移,先进行动点检验再进行单点检验能够提高检验可靠性。本文对水电站高程控制网复测技术和点位稳定性分析方法进行了研究,可为相关工程应用提供参考。