4D打印可编程液态金属-液晶弹性体软体致动器
2024-04-09王发欣张欢陈原浩杨乐毕然沈永涛封伟王玲
王发欣, 张欢, 陈原浩, 杨乐, 毕然, 沈永涛, 封伟, 王玲,2*
(1.天津大学 材料科学与工程学院, 天津 300350;2.天津大学 滨海工业研究院, 天津 300452)
1 引言
与传统的刚性致动器相比,软体致动器展现出良好的柔顺性以及优越的变形能力,在人机交互[1]、软体机器人[2-3]、物质运输[4]等领域得到广泛应用。制备软体致动器的基体材料一般有液晶弹性体(LCE)、水凝胶以及形状记忆聚合物等。特别地,液晶弹性体(LCE)在外界刺激下可以实现液晶基元微观的有序-无序转变,并且伴随着宏观的各向异性的可逆变形(>400%),因此被认为是制备软体致动器的理想材料。然而,传统的热刺激响应型LCE软体致动器的驱动高度依赖于热源,限制了其实际应用。近些年研究人员通过与其他材料复合,开发出了可以在电、光、湿度及磁场下驱动的LCE软体致动器[5-8]。相比其他种类的软体致动器,光驱动软体致动器可以被远程控制,并可以通过控制光照强度、光照时间、光的波长等参数对光驱动形变进行精确控制[9]。Yang等[8]将MXene复合进入LCE中,制备了可以在天顶角和方位角都能追踪光源的液晶弹性体管状致动器。传统制备光驱动软体致动器的光热材料通常是MXene[10]、金纳米线(AuNPs)[3]和碳纳米管(CNT)[11]等固体纳米材料。但是固体纳米材料复合进LCE后,一是会降低LCE的形变量,从而影响光驱动致动器的驱动性能;二是固体填料在LCE中的均匀分散比较困难,特别是在高填料体积分数的情况下,由于颗粒团聚的存在,此类复合材料在大应变下容易发生断裂。
共晶镓-铟(EGaIn)是一种熔点接近或低于室温的液态金属(LM),兼具金属和流体特性。因此,利用镓-铟(EGaIn)合金与LCE结合制备的液态金属-液晶弹性体(LM-LCE)墨水具有良好的光热性能、优越的变形能力以及优异的界面稳定性。与其他光热材料相比,LM-LCE墨水(高达60%质量分数)不会显著改变软体致动器的机械性能和驱动性能[12]。因此,LM在软体机器人中得到了广泛应用。Lv等[13]通过将LM墨水与LCN薄膜复合,制备了可以光驱动的LM-LCN软体致动器。该致动器在光照下可以发生不同频率的振动,有望实现光驱动扑翼飞行。Lu等[14]在LCE中掺杂了5%(质量分数)的LM液滴,制得的新型LM-LCE复合材料具有较高的抗疲劳性能、良好驱动性能(最大驱动应变为~55%,最大驱动应力为~1.13 MPa)、完全可逆的热/光驱动功能以及良好的中温自愈能力,是高负载驱动器的理想候选材料。虽然目前存在的光驱动LM-LCE软体致动器有较好的机械性能和驱动性能,但是大部分都只能发生简单的弯曲或者收缩形变,限制了软体致动器的实际应用。
自2013年Tibbits教授提出4D打印概念之后,驱动材料的4D打印获得了广泛关注[15]。作为一种性能出色的驱动材料,LCE的4D打印在2017年被首次报道[16]。4D打印技术可以很容易对LCE的液晶基元进行编程取向,使得LCE软体致动器可以展现出各种复杂的变形模式,进一步提高了LCE在软体致动器和软体机器人领域的应用[17-19]。Zhai等[20]利用4D打印技术制备了一种基于LCE的薄膜。该薄膜在加热后可以自发蜷曲成管状并能够快速滚动,同时可以通过改变管状机器人的长度和弯曲方向调节滚动速度和方向,且该管状机器人具有一定的智能感知功能,可以应用于货物运输和外太空陌生环境的智能探索。Yang等[21]制造了一种4D打印的荧光钙钛矿量子点(PQD)-LCE薄膜,该薄膜在室温下可以自发卷曲成卷,当薄膜被加热或者近红外光照射时,卷内PQD信息就可以展示出来,实现了光驱动自展开信息显示,有望利用到信息加密技术中。
本文报道了基于4D打印技术的光驱动液态金属-液晶弹性体(LM-LCE)软体致动器,该致动器在光照下展现出复杂且可逆的形变。首先制备出具有高稳定性的LM-LCE墨水,系统地研究了LM掺杂量、打印温度和打印速度对LM-LCE软体致动器驱动性能的影响;探究了LM-LCE软体致动器的光吸收和光热转换性能及在近红外光照射下的驱动性能;最后通过4D打印技术设计打印出结构和液晶基元取向更为复杂的LM-LCE软体致动器,演示了其光驱动变形过程。该LM-LCE软体致动器在动态和复杂的环境中展现出更加优异的适应性及可调节性,有望在软体致动器和软体机器人领域得到广泛应用[22-23]。
2 实验
2.1 材料和仪器
实验中使用的主要材料:1,4-双-[4-(3-丙烯酰氧基丙氧基)苯甲酰氧基]-2-甲基苯(RM257):分析纯,江苏合成新材料有限公司;正丁胺,萨恩化学技术(上海)有限公司;α,α-二甲氧基-α-苯基苯乙酮(Irgacure 651),上海阿拉丁生化科技股份有限公司;镓铟液态合金,山东烟台艾帮新材料有限公司;乙醇:分析纯,天津希恩思奥普德科技有限公司。
实验中使用的主要仪器:超声波细胞粉碎机,宁波新芝生物科技股份有限公司JY92-IIN;DIW-3D打印机,杭州捷诺飞生物科技股份有限公司Bio-Architect SR;LED光固化器,广州市邦沃电子科技有限公司FUV-6BK;激光光源,长春新产业光电技术有限公司MDL-808;电位粒度分析仪,英国马尔文仪器有限公司Nano ZS90;偏光显微镜,尼康LV100POL;差示扫描量热仪,日本日立股份有限公司S4800;机械拉伸机,深圳三思纵横科技股份有限公司Suns890;紫外-可见光谱仪,日本Shimadzu公司UV-3600plus;红外热成像仪,德国Fluke公司TiX500;透射电子显微镜,日本电子公司JEM-2100F。
2.2 LM微米颗粒的制备
LM微米颗粒制备过程如图1所示。首先,将1 g LM置于10 mL玻璃小瓶中,加入5 mL 乙醇。然后,将配置好的LM-乙醇溶液置于超声波细胞粉碎机中进行超声,超声探头与瓶底之间保留1 cm距离,细胞粉碎机功率设置为325 W,超声时间为10 min,超声开、关时间各为5 s。最后,将超声后的LM-乙醇溶液转移至离心机离心,设置转速为10 000 r/min,离心时间为10 min。离心结束后去除上清液,得到LM微米颗粒。

图1 超声制备LM微米颗粒过程示意图Fig.1 Schematic diagram of the ultrasound preparation of LM micron particles
2.3 LM-LCE软体致动器的制备
LM-LCE软体致动器的制备如图2所示。取2 g RM257、0.198 g正丁胺于20 mL透明玻璃小瓶中,其中液晶和正丁胺摩尔比为1.25∶1。加入0.02 g光引发剂I-651后,放置到150 ℃的热台上加热。待各组分完全溶解后,取一定质量(0 g,0.1 g,0.2 g,0.3 g,0.4 g;分别对应液晶质量分数0%,5%,10%,15%,20%)的LM微粒加入到混合溶液中搅拌至均匀。将混合均匀的墨水放入4D打印加热料筒中,置于80 ℃真空干燥箱中反应3 h后得到LM-LCE墨水。之后将墨水料筒放入4D打印机中,以特定程序将LM-LCE墨水打印到玻璃基板上,边打印边用紫外灯固化,打印完成后正反两面分别继续固化30 s,得到LM-LCE软体致动器。
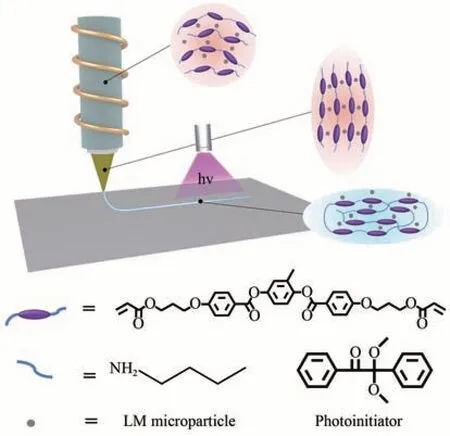
图2 4D打印LM-LCE墨水的过程示意图及LM-LCE墨水的分子结构Fig.2 Schematic diagram of the process of 4D printing LM-LCE ink and the molecular structure of LMLCE ink
3 结果与讨论
3.1 LM微米颗粒的形貌
LM在乙醇溶液中超声10 min会被打碎成微粒分散在乙醇溶剂中(图3(a))。将LM微粒配成稀溶液,并通过电位粒度分析仪测量其具体尺寸。图3(b)呈现出LM颗粒尺寸分布在400~1 600 nm范围内,分布中心约为1 000 nm;图3(c)为LM颗粒的TEM图片,LM颗粒呈圆球形。

图3 LM微米颗粒的表征。(a)LM颗粒分散在乙醇溶液中的照片;(b)LM颗粒粒径分布图;(c)LM微粒TEM图片。Fig.3 Characterization of LM micron particles.(a) Photo of LM pellets dispersed in ethanol solution;(b) LM particle size distribution map; (c) LM particle picture.
3.2 不同条件对LM-LCE软体致动器性能的影响
LM-LCE软体致动器采用光热驱动的方式:LM吸收光产生热量使软体致动器升温,当温度达到LCE向列相态-各向同性态相转变温度(TNI)时,软体致动器产生形变。TNI对于软体致动器是一个重要的性能参数。为了探究LM微粒对TNI的影响,实验中利用差示扫描量热仪(DSC)测试了不同含量(质量分数)LM微粒的LM-LCE墨水的相变温度。图4(a)为含有不同LM质量分数的LM-LCE墨水的DSC曲线。不含LM微粒的LCE墨水的TNI为88.1 ℃,而加入LM颗粒后TNI略微增加,含有LM质量分数为5%,10%,15%,20%的LM-LCE墨水的TNI分别为91.57,90.79,90.34,91.64 ℃。分析原因可能是由于LM颗粒与液晶聚合物分子链之间存在相互作用力,限制了LCE内部链段的运动,但整体上20%(质量分数)以内的LM含量对LM-LCE墨水的相转变温度影响并不大。LM微粒的加入会对LM-LCE软体致动器的力学性能产生影响。实验中利用万能试验机对打印出来的沿长轴取向的单层LM-LCE软体致动器进行了力学测试,实验结果如图4(b)所示。随着LM质量分数增加(0%,5%,10%,15%,20%),LM-LCE的模量和拉伸断裂强度增加,断裂伸长率降低。
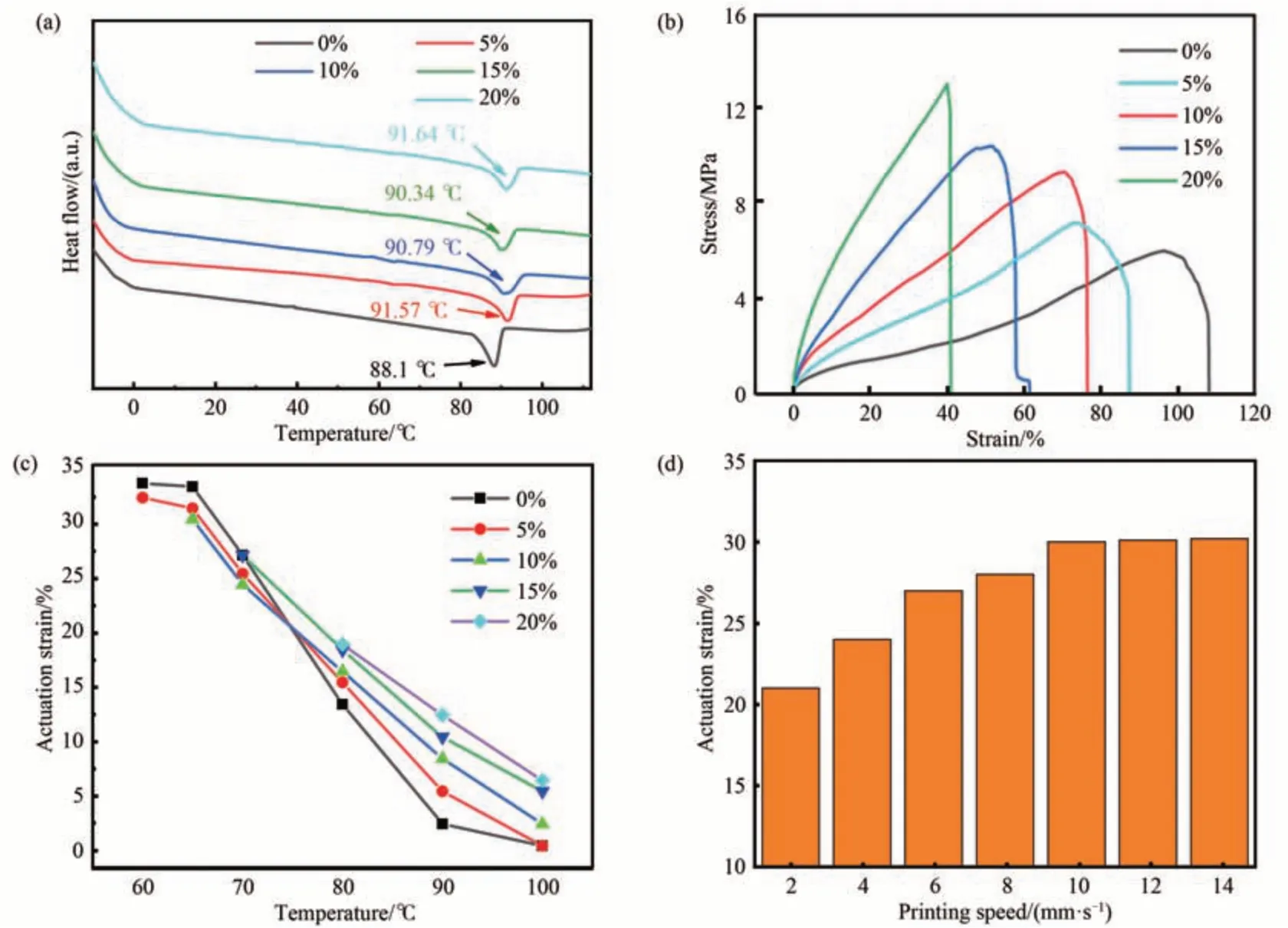
图4 不同条件下LM-LCE软体致动器的性能。(a)不同LM含量(质量分数)的墨水的DSC曲线;(b)不同LM微粒浓度(质量分数)下LM-LCE软体致动器的应力应变曲线;(c)打印温度和LM含量(质量分数)对致动器驱动应变的影响;(d)打印速度对致动器驱动应变的影响。Fig.4 Performance of LM-LCE software actuators under different conditions. (a) DSC curves for inks with different LM content (mass fraction); (b)Stress-strain curves of LM-LCE soft actuators under different LM particle concentrations (mass fraction); (c) Effect of printing temperature and LM content (mass fraction) on actuator drive strain;(d) Effect of print speed on actuator drive strain.
实验中固定喷头压力0.3 MPa,打印速度10 mm/s,喷嘴直径0.5 mm。将含有不同LM微粒含量(质量分数0%,5%,10%,15%,20%)的LM-LCE墨水置于不同打印温度下(60 ℃,65 ℃,70 ℃,80 ℃,90 ℃,100 ℃),分别打印出沿长轴取向的LM-LCE软体致动器。测量在不同打印温度下不同LM微粒含量的LM-LCE软体致动器的最大驱动应变。如图4(c)所示,不同LM微粒含量的LM-LCE软体致动器,随着打印温度的提高,致动器的驱动应变会随之降低;在打印温度为60 ℃时,LM-LCE软体致动器最大驱动应变可达33%;在打印温度为100 ℃时,LM-LCE软体致动器的最大驱动应变仅为6%。这是因为由于熵弹性的存在,链段会自发趋于无序。LM-LCE墨水中的液晶基元在喷嘴中由于剪切力而获得取向的同时在不断失去取向,其中温度越高,链段运动越活跃,取向趋于无序的速度也越快。当打印温度达到一定值后,通过喷嘴取向的液晶基元快速恢复,光固化时已经完全失去取向,打印出的致动器在无束缚条件下也会失去刺激响应形变能力。但同时随着LM质量分数的提高,墨水粘度增大,所需要的打印温度也越高。LM质量分数为10%时,60 ℃的打印温度下LM-LCE墨水已经无法挤出;LM质量分数为15%时,60 ℃和65 ℃时也无法挤出;LM质量分数到达20%时,80 ℃以上的料筒温度下才能完成打印过程。当LM质量分数在10%以内,在打印温度为60 ℃时,驱动应变虽然略有下降,但都能保持在30%以上。继续增加LM浓度,LM-LCE墨水的挤出过程需要更高的温度,打印出来的LM-LCE软体致动器驱动应变较低,因此LM质量分数超过20%时不做进一步探究。本实验选用LM质量分数为10%的LM-LCE墨水,调节打印温度为65 ℃进行接下来的打印参数测试。
LM-LCE墨水在打印时主要经历两个作用力而发生取向:其一是喷头挤出过程中受到的剪切作用力,另一个是在基底上打印时由于打印速度高于喷头挤出速度而受到的拉伸作用力。挤出过程所导致的取向情况主要由打印温度所控制。拉伸所导致的取向主要由打印速度所控制。实验中固定LM-LCE 墨水的LM质量分数为10%,打印压力0.3 MPa,打印温度65 ℃,打印速度从2 mm/s逐渐提高到14 mm/s。如图4(d)所示,LM-LCE软体致动器的驱动应变先提高,在打印速度为10 mm/s时趋于稳定,原因可能是10 mm/s的打印速度已经实现了LM-LCE墨水所能到达的最大取向。如果继续增加打印速度,打印在基底上的液晶不连续,软体致动器无法成型,所以选用10 mm/s的打印速度进行接下来的实验探究。
3.3 LM-LCE驱动机理及性能
LCE的变形模式取决于液晶基元的排列方向,如果LCE薄膜上所有的液晶基元都沿着一个方向排列,则LCE薄膜可以发生沿排列方向的收缩。但是液晶基元的取向可以更为复杂,如倾斜、扭曲诱导LCE薄膜发生更复杂的变形。相比于形状记忆聚合物和水凝胶,LCE具有相对较快的刺激响应速度(≈100 ms)和大的各向异性变形(>400%),且形变过程是可逆的[24]。LM具有光热转换功能[25],将LM掺杂进LCE中可以使LCE能够在红外光照射下驱动。
设计上下两层打印方向分别为平行/垂直于长轴方向(图5(a)),打印得到的软体致动器上层的液晶基元沿着长轴取向,下层的液晶基元垂直于长轴取向。当软体致动器被加热到TNI以上时,上层延长轴方向发生收缩,垂直于长轴方向发生膨胀;下层则是沿长轴方向发生膨胀,垂直于长轴方向发生收缩。所以软体致动器在加热时会表现出向上、向内的弯曲。由于长轴方向收缩/膨胀变化较大,所以主要发生向上弯曲。图5(b)为在808 nm近红外光照射下具有上下两层垂直取向结构的LM-LCE软体致动器弯曲前后照片。利用紫外-可见光谱仪测试LM-LCE的光吸收性能,结果如图5(c)所示。LM-LCE软体致动器在全光谱范围内均呈现较好的光吸收性能。本实验中主要通过近红外光探究和演示LMLCE软体致动器的光驱动性能。接着对LMLCE软体致动器的光热转换性能进行探究,使用功率密度分别为0.1,0.2,0.3,0.4,0.5 W/cm2的808 nm近红外光照射打印后制备的单层LM-LCE软体致动器,使用红外热成像仪记录其表面温度变化。如图5(d)所示,随着光功率密度的提高,LM-LCE软体致动器的升温速率和所达到的最大温度均提高。光强为0.5 W/cm2时,致动器表面温度迅速升高,10 s内达到120 ℃,16 s 达到最高温度130 ℃,之后温度趋于稳定。由此可以看出,LM微米颗粒具有良好的光热转换能力。随着光照强度的增加,LM-LCE软体致动器的弯曲速率也在不断增加(图5(e))。光强分别为0.2,0.3,0.4,0.5 W/cm2时,LM-LCE软体致动器达到最大弯曲角度的时间分别为35,22,16,12 s。与此相比,不添加LM微米颗粒的LCE软体致动器在0.5 W/cm2的光照强度下并不发生弯曲变形。另外,近红外光照射LM-LCE软体致动器驱动时存在自遮蔽效应:当近红外光光源从正上方照射,在软体致动器弯曲角度达到90°时,处于高处的致动器会遮蔽红外光继续照射弯曲处,从而使弯曲角度稳定在90°。

图5 LM-LCE软体致动器的光驱动示意图及性能。(a)LM-LCE软体致动器的结构和弯曲过程示意图;(b)LM-LCE软体致动器的弯曲过程照片;(c)LM-LCE软体致动器的紫外-可见光光谱;(d)不同光强下LM-LCE软体致动器的温度随时间变化曲线;(e)不同光强下LM-LCE软体致动器的弯曲角度随时间变化曲线;(f)LM-LCE软体致动器的结构和扭曲过程示意图;(g)LM-LCE软体致动器的扭曲过程照片。Fig.5 Schematic diagram and performance of optical drive of LM-LCE software actuator.(a) Schematic diagram of the structure and bending process of the LM-LCE software actuator; (b) Photo of the bending process of an LM-LCE software actuator; (c) UV-Vis spectrum of LM-LCE soft actuators; (d) Temperature variation curves of LM-LCE software actuator with time under different light intensities; (e) Bending angle of LM-LCE software actuator under different light intensity changes with time; (f) Schematic diagram of the structure and twisting process of the LMLCE software actuator; (g) Photo of the twisting process of an LM-LCE software actuator.
可以通过设计上下两层打印方向与长轴呈固定角度α/β(α、β分别代表上下两层打印方向于长轴方向所呈现的角度,图5(f)),制备出的LMLCE软体致动器可在近红外光照射下发生螺旋变形。当角度分别为15°/165°,30°/150°,45°/135°,60°/120°,75°/105°时,LM-LCE软体致动器在近红外光下的螺旋变形情况如图5(g)所示。
3.4 LM-LCE可编程形变
将LM-LCE墨水按预先设计的图案和液晶基元排列方式打印,所得到的LM-LCE软体致动器可发生更复杂且可以提前设计的驱动变形。如图6(a)所示,设计LM-LCE软体致动器呈双层结构,两层中液晶基元取向互相垂直,且在不同位置交替排列。当用近红外光照射时,LM-LCE软体致动器就可发生提前设计的波浪状弯曲形变,如图6(b)所示。如图6(c)所示,设计LMLCE软体致动器呈单层结构,其中液晶基元呈螺旋结构排列,以阵列形式重复6次。当用近红外光照射时,LM-LCE软体致动器可以发生以螺旋中心为顶点的凸起变形,如图6(d)所示。

图6 LM-LCE软体致动器的复杂变形。(a)具备交替正交取向结构的LM-LCE软体致动器的变形过程示意图;(b)具备交替取向结构的LM-LCE软体致动器的变形过程照片;(c)具有圆锥形阵列取向结构的LM-LCE软体致动器的变形过程示意图;(d)具有圆锥形阵列结构的LM-LCE软体致动器的变形过程。Fig.6 Complex deformations of LM-LCE soft actuators. (a) Schematic diagram of the deformation process of an LMLCE soft actuator with an alternating orientation structure; (b) Photo of the deformation process of an LM-LCE soft actuator with alternating orthogonal structure; (c) Schematic diagram of the deformation process of LM-LCE soft actuator with conical array structure; (d) Deformation process of LM-LCE soft actuator with spiral array structure.
4 结论
本文基于4D打印技术,提出了一种可以通过编程液晶基元取向方式得到特定复杂形变的LM-LCM光驱动软体致动器的方法。首先观测LM微球的尺寸大小,通过电位粒度分析仪了解到LM颗粒尺寸分布在400~1 600 nm范围内,分布中心约为1 000 nm。其次探究了不同条件对LM-LCE软体致动器性能的影响。确定在LM质量分数为10%的LM-LCE墨水,打印温度为65 ℃,打印速度为10 mm/s,打印压力为0.3 MPa的实验条件下进行LM-LCE致动器可编程形变的研究。接着探究了LM-LCE软体致动器的光热性能,在光强为0.5 W/cm2的红外光照射下,致动器表面10 s内可达到120 ℃。最后通过4D打印技术成功制得了具备交替正交取向结构的光驱动LM-LCE软体致动器和具有圆锥形阵列取向结构的光驱动LM-LCE软体致动器,达到了可以通过编程液晶基元取向来实现特定形变的效果。本论文所制备的LM-LCE软体致动器有望在医疗、军事和软体机器人领域得到广泛应用。
