高速磁悬浮电机三段式转子动力学分析研究
2024-04-03徐向波毕中炜
李 晖,徐向波,陈 劭,毕中炜
(1.北京林业大学 工学院,北京 100091; 2.北京高孚动力科技有限公司,北京 100083)
0 引 言
随着工业科技的兴盛发展和生态环保的时代要求,高速磁悬浮电机成为实现节能增效目标的重点设备之一。磁悬浮电机具有体积小、功率密度大、动态响应快、系统噪声小、系统传动效率高等特点[1],解决了传统电机自身难以避免的诸多问题,被广泛应用在鼓风机、磁悬浮离心压缩机等设备中,现已逐步成为国内外的研究热点。
当电机高速运转时,由于转子不平衡质量和外界干扰等因素的影响,转子系统容易发生恶性共振,破坏系统的稳定运行,对系统的安全性造成严重影响[2]。为保证磁悬浮电机在高速工况下稳定工作,对转子的动力学研究必不可少,传递矩阵法和有限元法是当前动力学分析的两个主要手段。文献[3]利用传递矩阵法对三圆盘等直径转子系统做模态分析和不平衡响应特性分析,并探究了支撑刚度和系统温度对转子临界转速的影响。文献[4]采用改进的Riccati传递矩阵法完成转子动力学模型建立,并通过多目标遗传算法优化关键设计参数,以得到满足工程条件的最优设计。文献[5]运用有限元分析软件对考虑预应力的转子系统进行动力学研究,由仿真结果分析得出改善转子动态特性的方法及该转子适用的电机类型。文献[6]利用有限元分析软件ANSYS完成转子动力学分析,验证了转子设计的合理性。在实际工程的分析应用中,传递矩阵法忽视了转子质量和惯性分布对转子运动的影响,而有限元法能够兼顾到多因素对转子运动的影响,模型构建更完整,计算结果更精确,应用范围更为广泛[7-8]。
转子作为电机的关键组成部分,其结构一般有表贴式、内置式和三段式三种类型。目前,国内在高速电机研究方面,对于表贴式转子和内置式转子的动力学研究比较多,而针对三段式转子的研究相对较少。文献[9-10]都先后探讨了关于表贴式转子结构建模的方法,并通过试验验证了其建模方法的可行性。文献[11]借助传递矩阵法对内置式转子结构展开了模态特性的研究。文献[12]提出修正材料弹性模量参数可用于三段式转子准确建模,但未做进一步的动力学探究。
本文以某款自研的10 kW、80 000 r/min高速磁悬浮电机中的三段式转子系统为研究对象,基于有限元法建立转子模型,分析其动力学特性,为之后同类型转子的电机优化设计和不平衡振动抑制提供参考。
1 转子动力学模型建立
1.1 模型建立
本文所研究的三段式转子系统主要应用于某款高速磁悬浮电机驱动的压缩机,具体结构如图1所示,由永磁体、护套、径向磁轴承硅钢片、轴向推力盘、检测环、叶轮等组成,主要结构参数如表1所示。转子组成零件众多、装配复杂,在实际运行时会涉及多种复杂理论,为提高仿真分析的准确性和高效性,对转子模型进行简化[13],去除转子轴段直径变化截面处的微小倒角和倒圆结构,对复杂的关键组件在等效处理后按整体建模,护套和永磁体之间设为摩擦接触以等效二者的过盈配合关系,永磁体和转轴之间因为胶粘相连则为绑定接触。
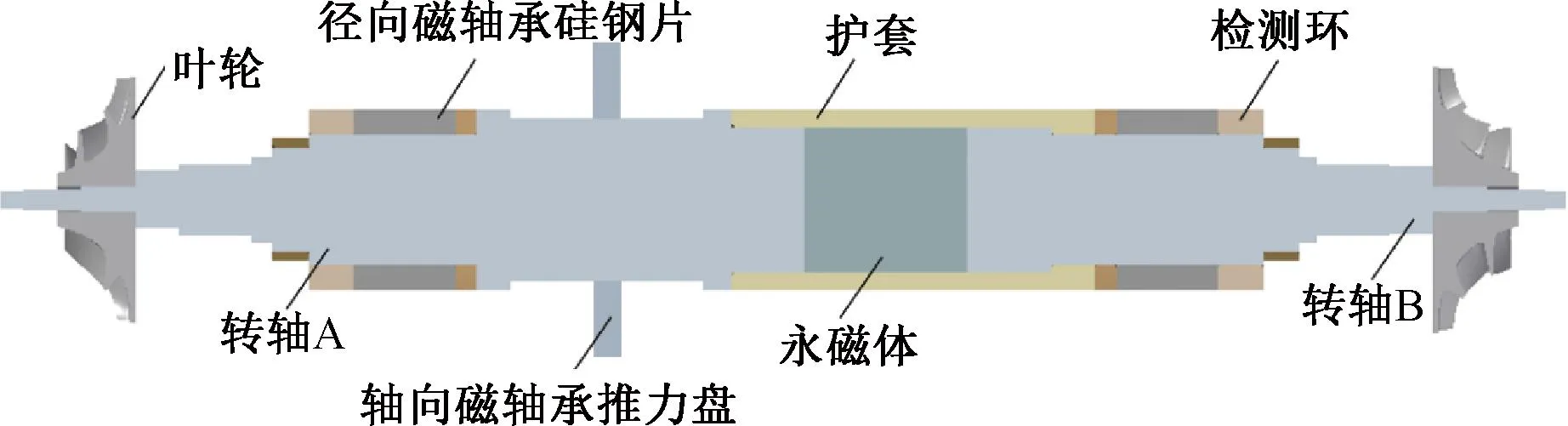
图1 三段式转子结构剖视图
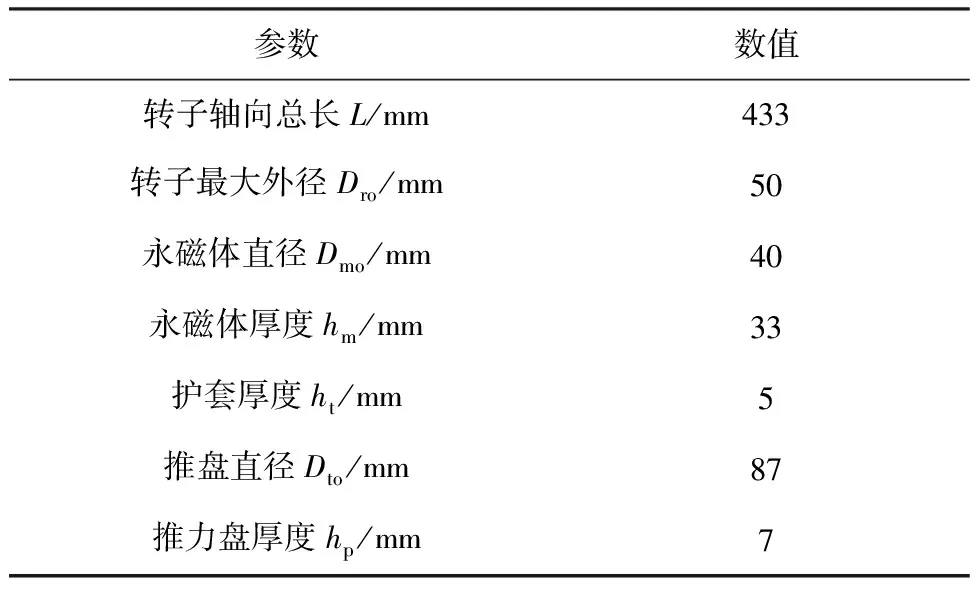
表1 转子结构参数
1.2 动力学方程
由弹性力学有限元理论分析求解,得到转子动力学通用运动方程如下[14]:
(1)

转子自由振动时不存在外部激励,在求解转子的固有特性时,可以忽略阻尼的影响,式(1)可简化成:
(2)
假设系统作简谐振动,令X(t)=xsin(ωt),代入式(2)可得:
Kx-ω2Mx=0
(3)
式中:x为振型矩阵;ω为固有频率。
将式(3)的求解转换为特征值与特征向量的求解,即得出转子系统的固有频率和振型,进而求得转子系统各阶临界转速。
2 转子临界转速分析
2.1 模态分析
每个振动系统都有若干个特殊的振动形态,即为模态。模态分析可以得到转子系统的固有特性,是研究动力学规律的基础。由式(3)可知,转子的模态特性与转子本身的质量、弹性模量等固有属性相关,本文转子系统运用的主要材料参数如表2所示。
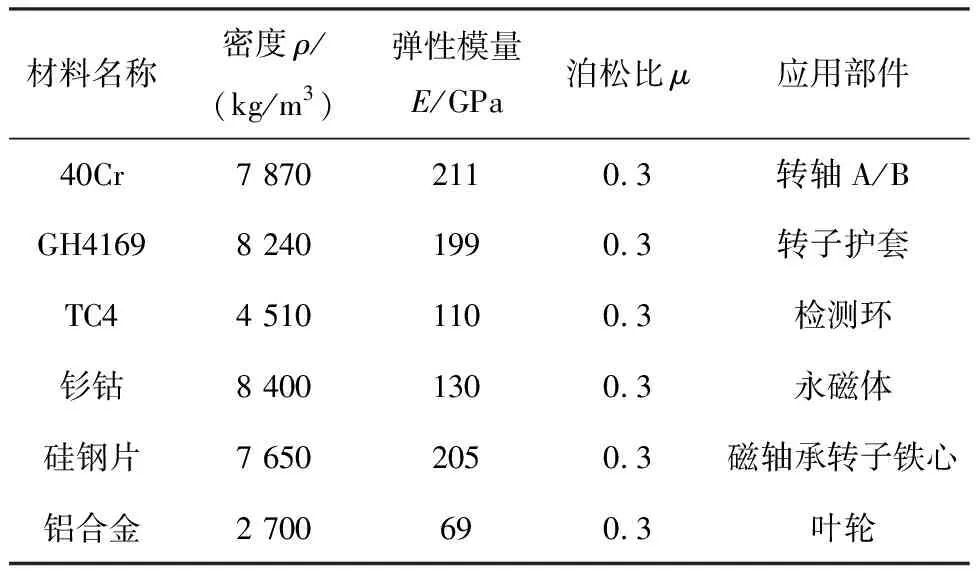
表2 材料参数表
将简化后的转子模型导入ANSYS-Workbench中,完成材料属性设置和网格划分,取转子系统前10阶自由模态进行仿真计算,结果如图2所示。转子系统的每一阶模态都有其对应的频率和振型。前6阶转子的固有频率很小或接近于0,此时转子呈现平动和锥动两种运动形式,为刚性模态;第7阶时转子开始出现弯曲,为一阶弯曲模态,固有频率为1 820 Hz;第9阶时转子为二阶弯曲模态,固有频率为2 784 Hz。
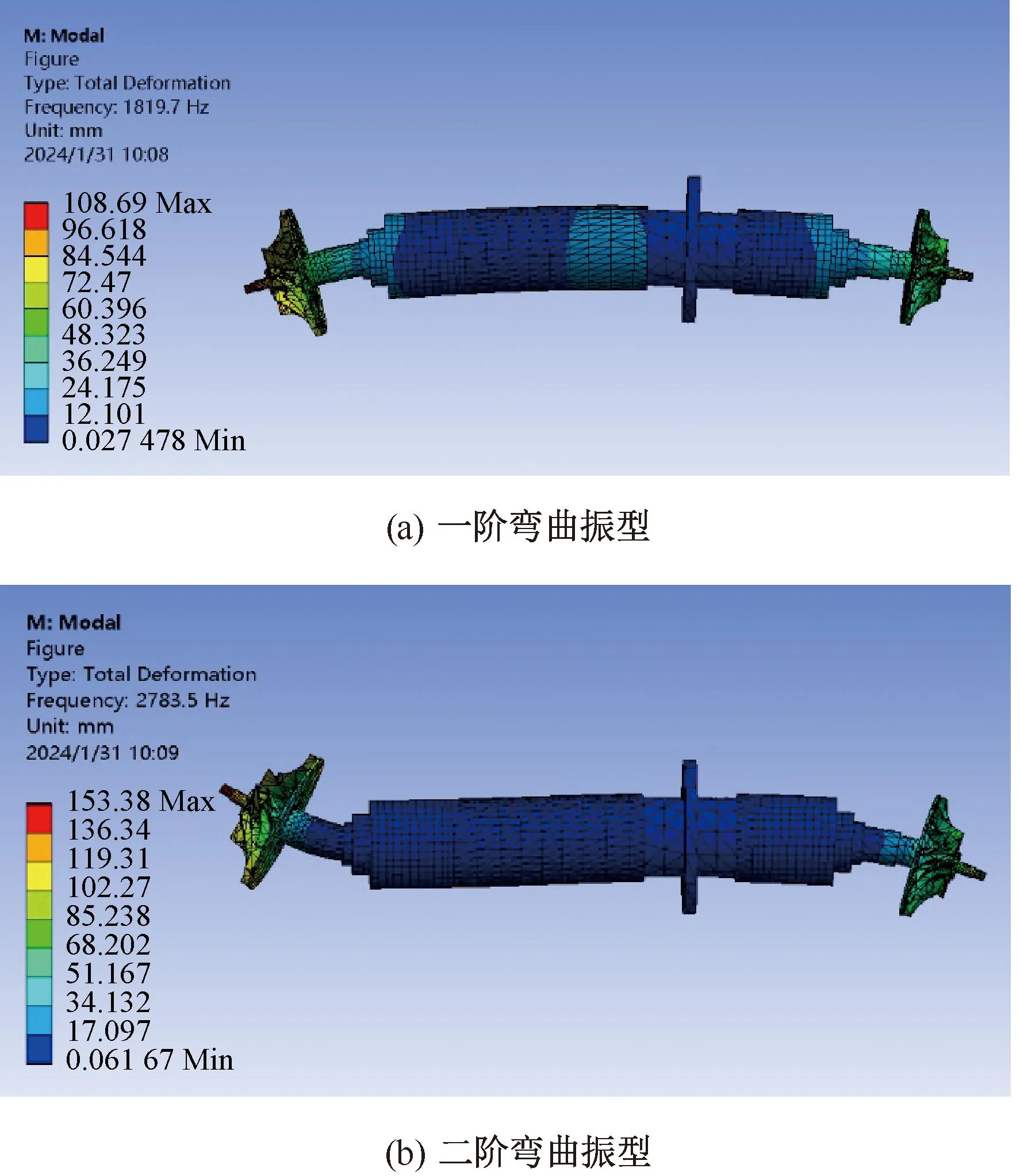
图2 转子模态固有频率及振型
2.2 临界转速分析
转子工作在临界转速附近时,容易产生转子共振,进而发生失稳现象。为了保证转子稳定运行,其工作转速与临界转速间要留有足够的安全裕度。对于刚性转子而言,一般要求N<0.75Nc1,其中N为转子工作转速,Nc1为转子一阶弯曲临界转速,0.75为安全系数[15]。
转子在实际运转中会产生涡动,为获得更为准确的计算结果,在Workbench的设置中要打开陀螺效应后进行分析,充分考虑涡动对临界转速的影响,并绘制坎贝尔图,如图3所示。
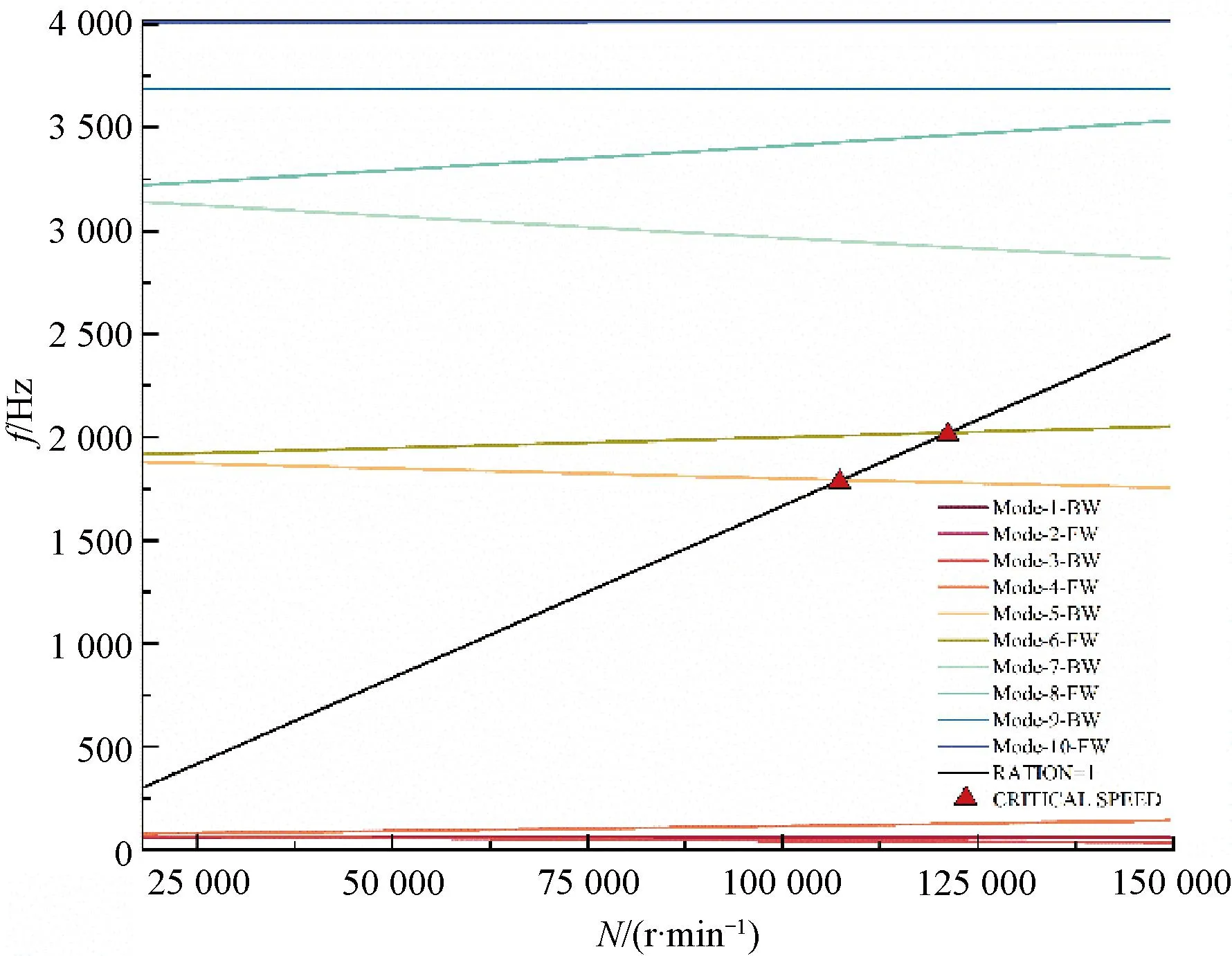
图3 坎贝尔图
坎贝尔图表达整个转速范围内转子的动态变化,横坐标为转子转速,纵坐标为转子的模态频率。图3中曲线分别表示同步激励、正向进动模态频率和反向进动模态频率。转子发生共振主要是因为有转子不平衡力的存在,其激发的是涡动方向与转速方向相同的进动模态,所以同步激励线与正向进动模态频率曲线的交点即为转子的临界转速。仿真结果表明,转子一阶弯曲临界转速为120 810 r/min,与转子额定工作转速80 000 r/min之间的安全裕度在15%以上,符合一般工程应用要求,转子在额定工作转速下不会发生恶性共振影响电机稳定运行。
2.3 轴承刚度对临界转速的影响
转子的动力学特性受多种因素影响,其中轴承刚度对转子的系统振动影响最为明显,探究轴承刚度与临界转速之间的变化关系是转子设计及动力学研究的关键[16]。本文在保持其余参数不变的情况下,仅改变轴承的刚度系数,得到临界转速随其变化的动态曲线,如图4所示。从图4中可知,转子的临界转速随轴承刚度增大而增加,其中转子刚性模态下的临界转速对于轴承刚度的变化更为敏感,转子一阶弯曲临界转速受其影响较小。由曲线波动趋势还可以发现,当轴承刚度增大到一定范围后,各模态下的临界转速增幅下降,增速变缓。磁悬浮轴承刚度一般在100~10 000 N/mm之间,该范围内转子一阶弯曲临界转速均在120 000 r/min以上,均能保证电机避免发生共振,故磁悬浮轴承刚度为100 N/mm即满足要求。
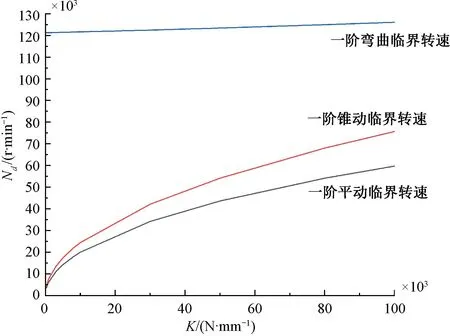
图4 临界转速与轴承刚度变化关系
3 转子不平衡响应分析
转子系统的不平衡响应是指由于转子不平衡质量的存在而引起的旋转机械振动[17],关于转子不平衡响应的研究有助于进一步完善转子结构,避免由其自身结构缺陷带来振动影响。转子的不同位置对于不平衡载荷的敏感程度不同,若在敏感度低的位置进行动平衡实验则会影响动平衡效果[18-19],通过不平衡响应分析亦可为后续的动平衡实验以及振动抑制提供理论依据。
根据ISO标准(ISO 21940-11),由转子不平衡量导致的不平衡力公式如下[20]:
F=meω2=Uω2
(4)
式中:F为不平衡力;U为转子不平衡量;m为转子质量;e为不平衡度;ω为转子角速度。
本文通过改变不平衡量大小,计算转子不同位置振幅变化情况来探究转子的不平衡响应特性。在Workbench中设定转子转速为80 000 r/min,设置频率范围为1 000~2 500 Hz,分析子步数为1 000。在转子上施加0.1 g·mm的不平衡量,仿真计算得到转子轴端、推力盘、轴承处的幅频曲线,如图5(a)所示。从图5(a)中可知,转子系统不同位置的不平衡响应程度不同,轴端的不平衡响应最为剧烈,靠近不平衡量施加位置近的轴承A比远离不平衡量施加位置的轴承B不平衡响应更剧烈。再对转子系统依次施加0.21 g·mm、0.05 g·mm两种不平衡量,得到转子的振幅变化如图5(b)所示。从图5(b)中可知,振动幅值与不平衡量大小相关,当不平衡载荷减小时,转子振幅会随之减小,同时转子振幅峰值与不平衡载荷的变化幅度存在等比关系。但无论不平衡量大小如何变化,转子各位置的峰值频率不变,都在1 891 Hz附近出现振幅峰值,与一阶弯曲临界转速值对应频率基本一致,验证了临界转速计算的准确性。
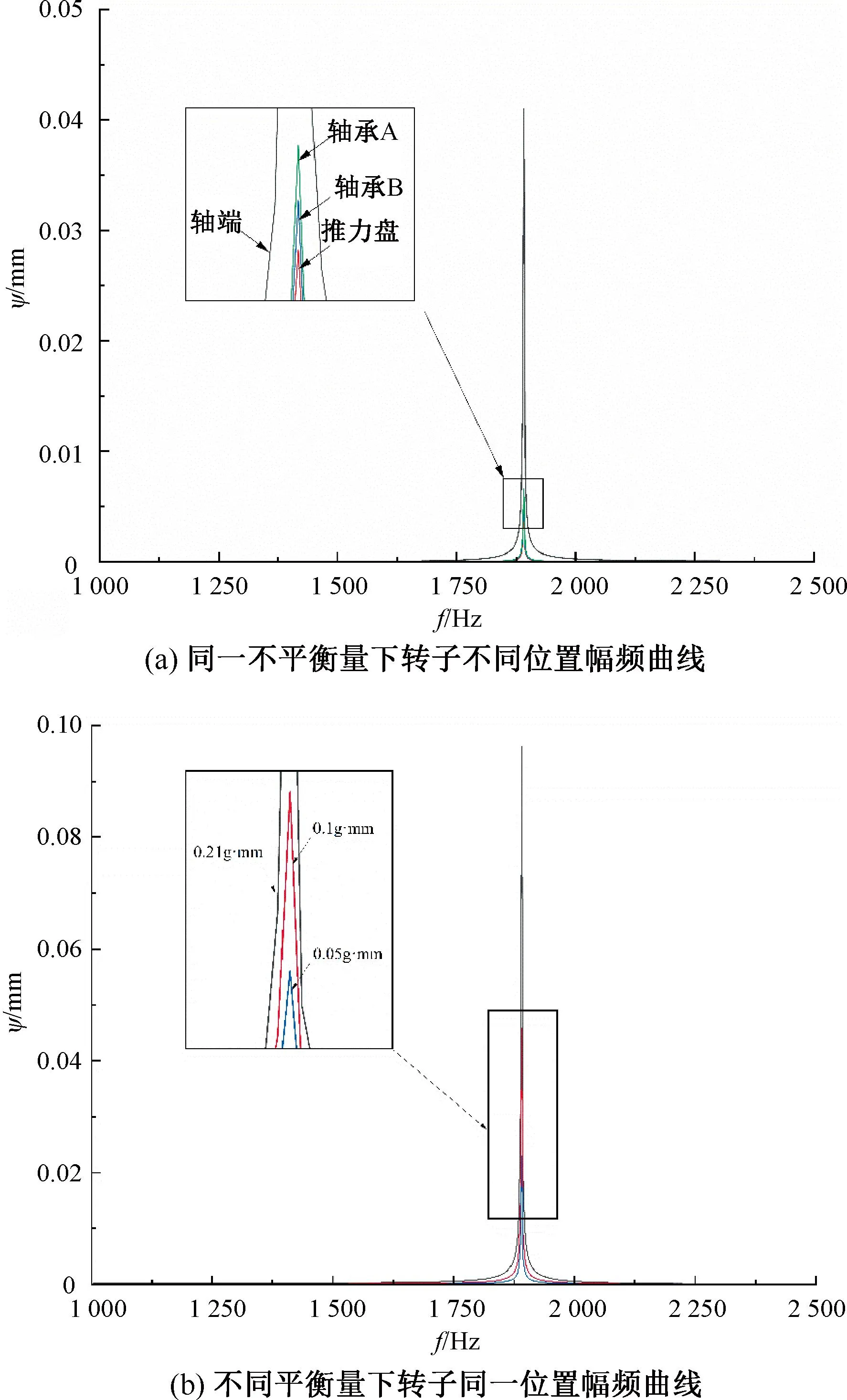
图5 转子不平衡响应分析结果
4 实验验证
为验证本文所建立的磁悬浮高速电机转子动力学系统模型的准确性,设计模态试验进行实验验证,如图6所示。
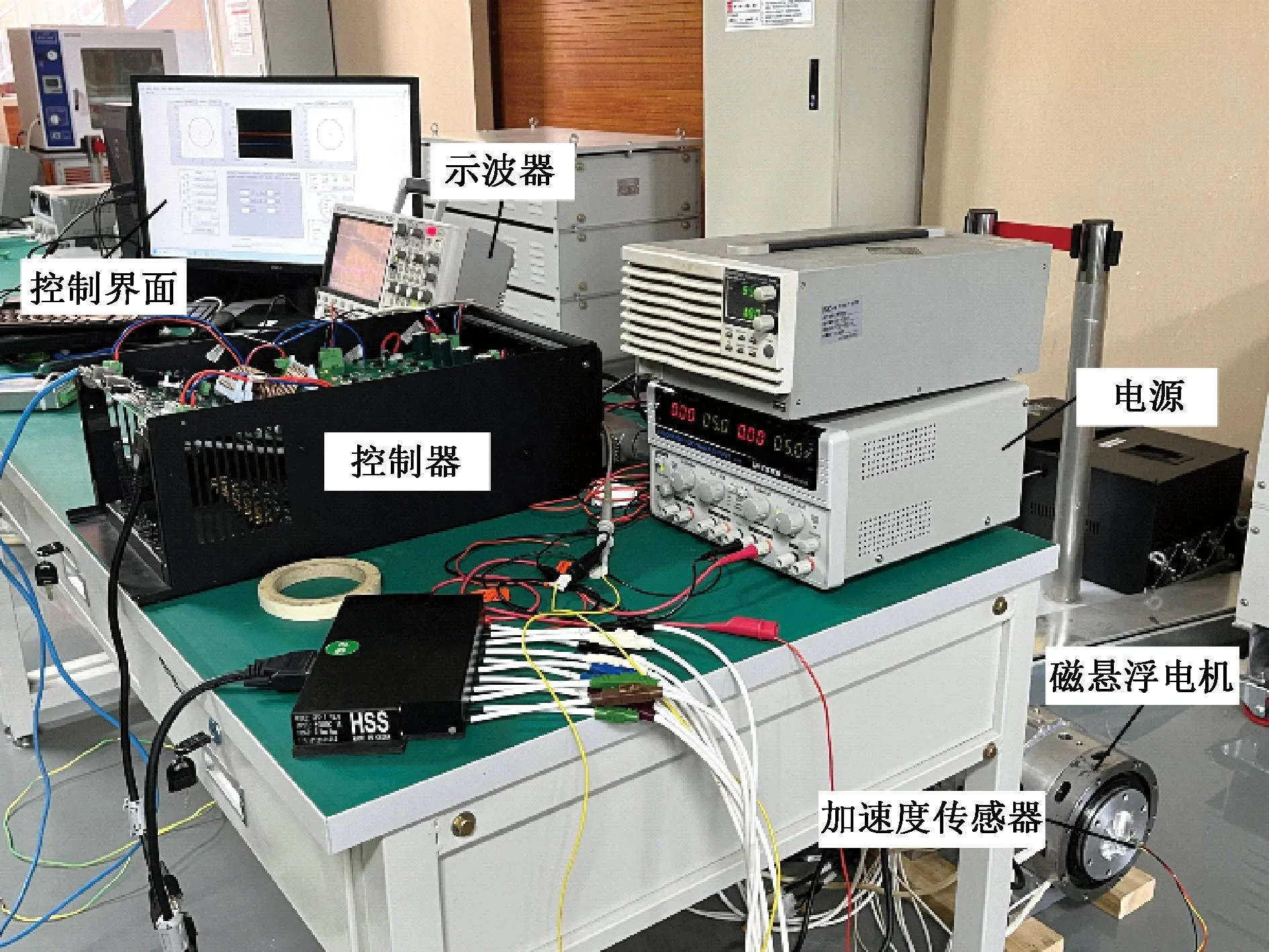
图6 转子模态实验装置
通过调节磁轴承控制器,令磁悬浮轴承位移刚度为100 N/mm,设置相关参数,使转子处于静态悬浮状态,此时利用铜锤敲击转子,该外在激励使转子系统产生振动,安装在转子上的加速度传感器将振动信号输入数据收集处理端,由示波器进行频谱分析,最后输出转子的频率响应曲线。考虑到加速度传感器安装位置、力锤敲击力度、力锤敲击位置等因素的差异或许会对实验结果造成影响,在转子轴系的多个位置上安装加速度传感器,并控制敲击力度进行多次试敲,得到的实验结果接近,可知这些因素对实验影响很小,可忽略不计。取多次实验的平均值,最终得到转子频率响应曲线如图7所示。
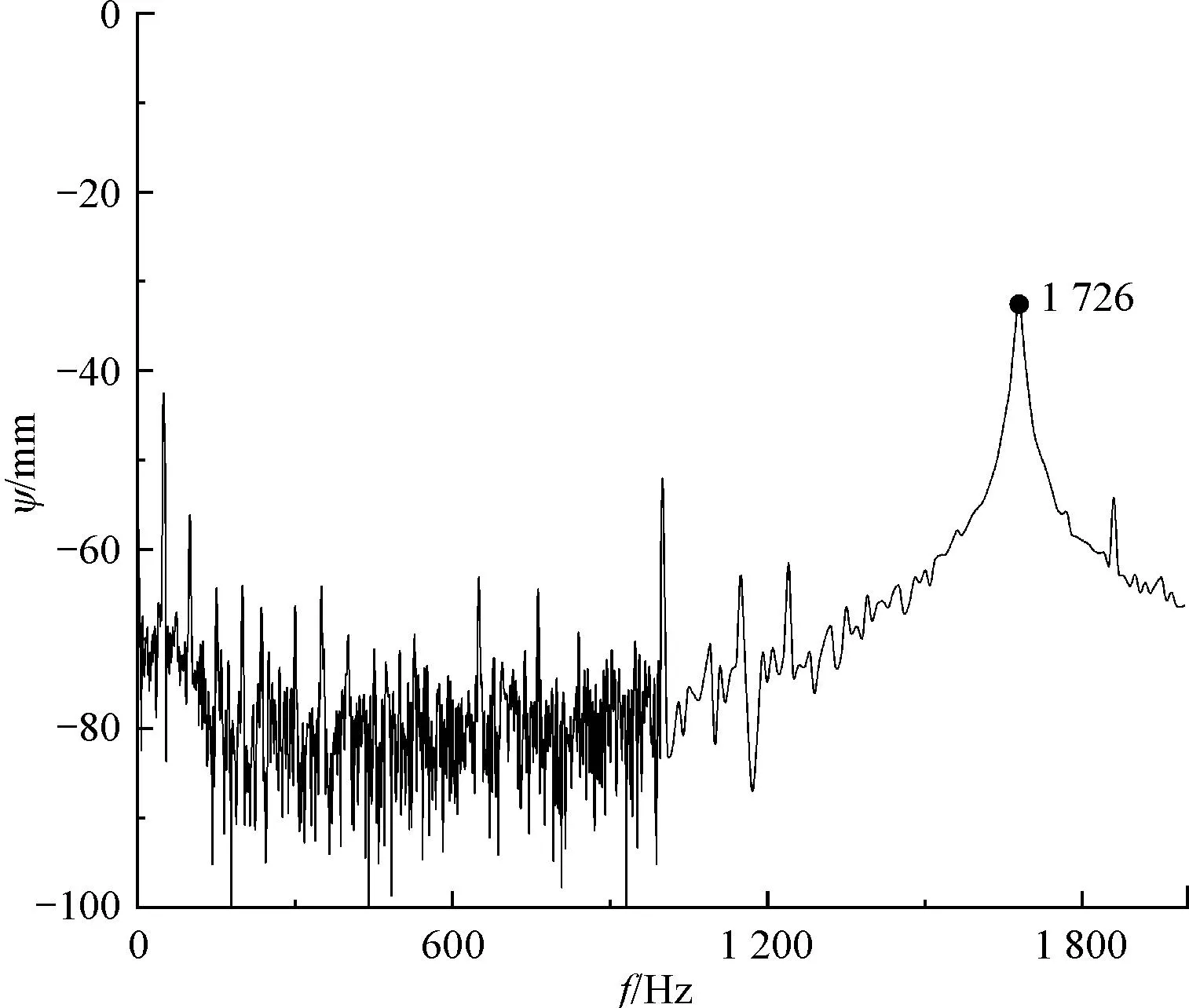
图7 转子频响曲线
经模态试验测得,转子自由模态下的一阶弯曲频率为1 726 Hz,对比在Workbench中的仿真值,两者误差约为5%,验证了本文中转子建模和仿真计算的准确性。
5 结 语
本文通过有限元仿真计算与实验验证的方法,探究了三段式转子的模态振型、临界转速和不平衡响应特性,并得到如下结论。
1)建立了三段式转子的三维实体简化模型,在Workbench中对其固有模态进行仿真计算,并设计模态测试试验,得到实验结果与仿真结果误差在5%左右,验证了转子建模的准确性。
2)对三段式转子进行了临界转速计算,由坎贝尔图可知,该转子的临界转速与工作转速之间的安全隔离裕度远大于15%,转子在工作转速下工作安全可靠,不会出现恶性共振,转子设计合理。同时,轴承刚度的调整与转子不同模态下临界转速的变化之间存在一定规律,转子刚性模态下的临界转速受轴承刚度变化影响明显,但随着轴承刚度增大到一定范围后,转子临界转速变化趋于平稳。
3)对三段式转子分别施加不同大小的不平衡量,观察转子的振幅变化。发现转子不同位置对于不平衡载荷的敏感程度不同,其中两段转轴的轴端处最为敏感。转子振幅与不平衡量之间呈正比关系,且当不平衡量按比例变化时,转子振幅也按照相同比例变化。转子振幅峰值对应的频率不随不平衡量大小而变化。
本文的研究有助于高速磁悬浮电机三段式转子进一步的优化设计和不平衡响应抑制,并为同类型转子的动力学研究提供参考。