伺服传动系统角度跳变电磁干扰问题研究
2024-04-03陈学文王以波柯昌燕
陈学文,王以波,柯昌燕
(中国电子科技集团公司第二十九研究所,成都 610036)
0 引 言
随着伺服传动系统的快速发展,电磁兼容(EMC)日益成为一个突出的问题,也引起了众多研究学者的探究兴趣[1-3]。伺服传动系统在工作过程中既是一个干扰源又是一个敏感设备,实际工作过程中由于其大负载、大功率的特性,容易成为制约整个系统稳定工作的因素,对系统可靠性和安全性带来挑战,电磁兼容问题严重时会导致系统工作流程终止[4-6]。
在多干扰因素叠加的场合,如和大功率发射机共存的机柜、多设备调试的厂房等,伺服传动系统在自身运行时也会受到周围电磁场环境的影响而无法正常工作[7-8]。基于以上考虑,对伺服传动系统的电磁兼容性能有严格要求时,在产品已经基本定型的情况下,如何采取最小代价、制定现场处理措施来解决所发生的电磁干扰(EMI)问题是需要着重考虑的,这对于降低成本、缩短周期有着重要意义。
本文以某型号伺服传动系统与系统联调过程中实际遇到的角度跳变电磁干扰问题为切入点,对可能引起电磁干扰的多种因素进行了分析,逐步排除,最终定位到具体的干扰源并采取对应的现场处理措施,抑制电磁干扰,通过比较抑制措施实施前后的效果,证实了所提出抑制措施的有效性。
1 伺服传动系统电磁干扰问题分析
1.1 伺服传动系统的组成
本伺服传动系统分为伺服部分和传动部分,伺服部分承担控制驱动功能,结构形式为金属机箱,一般安装于室内机柜中,传动部分承担动作执行功能,结构形式为传动座,上方承载天线,外观分别如图1(a)和图1(b)所示。实际使用时两者通过系统电缆连接,与上位机等通过串口通信。伺服控制驱动分机由伺服控制模块、伺服驱动器、制动电阻、电源模块、滤波器、手轮、连接器等组成,前面板有1个数码显示电路,用于显示当前传动座角度。传动座主要包括伺服电机、减速器、电限位装置、基座等部分。
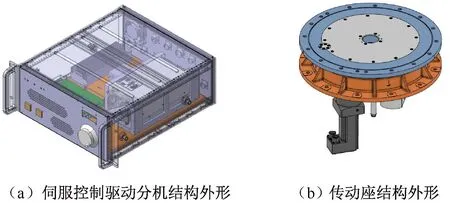
图1 伺服传动系统结构外形示意图
伺服控制驱动分机接收上位机通过串口RS232下发的动作命令,内部的伺服控制模块将接收的动作命令转换为模拟信号输出给驱动器,驱动器根据电压信号的大小计算出脉宽调制驱动电压的占空比,输出驱动电压到电机绕组,完成对电机的速度控制。同时,伺服控制模块接收传动座上编码器的同步时钟信号,经过运算处理得到位置误差信号,根据此反馈完成对速度的调节,在到达左、右限位时伺服控制模块接收低电平信号,控制驱动器驱动传动座反向运动,实现位置控制。工作期间伺服控制模块通过RS422串口输出给数码显示电路进行显示。图2为伺服传动控制系统工作原理图。
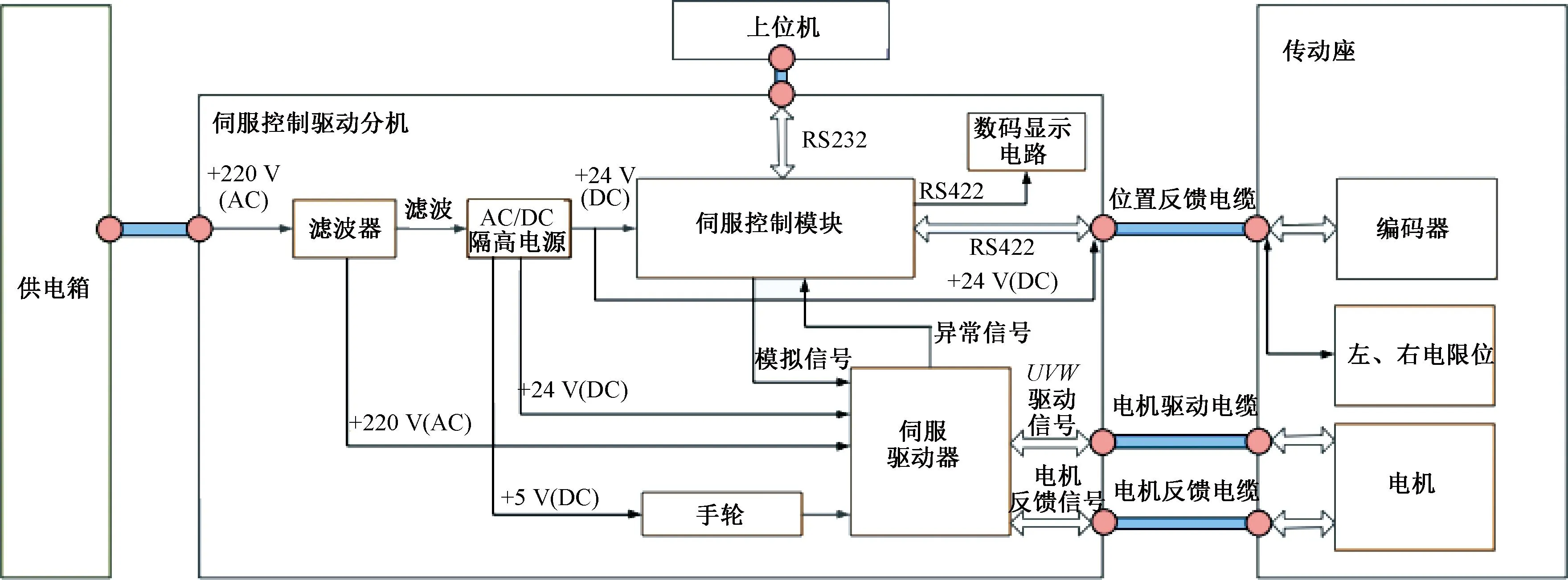
图2 伺服传动控制系统工作原理
1.2 伺服传动系统干扰现象分析
伺服传动系统的电磁干扰问题发生于和系统联试阶段,此时伺服控制驱动分机位于机柜内,安装位置上方有发射机等大功率设备。系统供电220 V、未下发动作指令的情况下,通过串口RS232接收的报文出现角度上报码值跳变、伺服控制驱动分机前面板数码显示电路角度跳变等异常现象。考虑系统实际使用和校验,为测试丢包率,去掉状态自动上报,改为状态查询上报,发送状态查询命令,伺服回复状态信息。实际测试使用和校验时,发送查询报文10 000条,接收状态信息报文7 026条,丢包率为29.74%,严重影响了信息传递的质量和可靠性,这是系统不能忍受的。
关掉机柜内的发射机等大功率设备后,角度跳变问题仍然发生,则电磁干扰问题与发射机等无关。后续测试转台的动作功能正常,但在以恒定速度转动时也出现角度值阶跃跳变的现象。此问题干扰了系统正常工作,严重时可能会导致系统误判、做出错误操作。由于伺服传动系统在实验室调试过程中一切正常,未出现此现象,系统接线正确,故认为此现象的原因为电磁干扰。考虑到联试时的工作环境和系统电缆均有所差异,需要进行故障定位及分析,同时采取对应的现场处理措施。
2 伺服传动系统电磁干扰抑制措施研究
电磁干扰具备三要素[9]:电磁干扰源、耦合途径和敏感设备。发生电磁干扰问题可以从这三个因素着手,只要消除其中某一个因素,就能解决 EMC 问题。伺服传动系统实际运行过程中EMI是客观存在的,干扰的耦合途径主要是辐射发射或者传导发射,良好的电磁兼容设计可帮助系统工作得更加稳定,但在产品已经生产完成的情况下,需要尽可能降低成本、缩短周期,主要措施依赖于制定现场解决办法,以提升伺服传动系统的电磁兼容性能,使系统恢复正常工作。
伺服控制驱动分机内和传动座内的组成都已经完成模块化设计,角度跳变涉及回路为位置环,则敏感设备可以确定为和系统通讯的伺服控制模块或上报角度源码的编码器,干扰源主要考虑分机内用于给模块供电的AC/DC电源、伺服驱动器、传动座内电机,耦合途径主要考虑分机内电缆、分机机壳、机柜、伺服控制驱动分机和传动座之间的3根电缆、空气等。
2.1 电磁干扰抑制常用技术措施
如图3所示,电磁干扰控制技术可分为以下五类[10-12],下面主要从这五个方面来讨论本伺服传动系统设计阶段电磁干扰的抑制技术以及存在的问题。
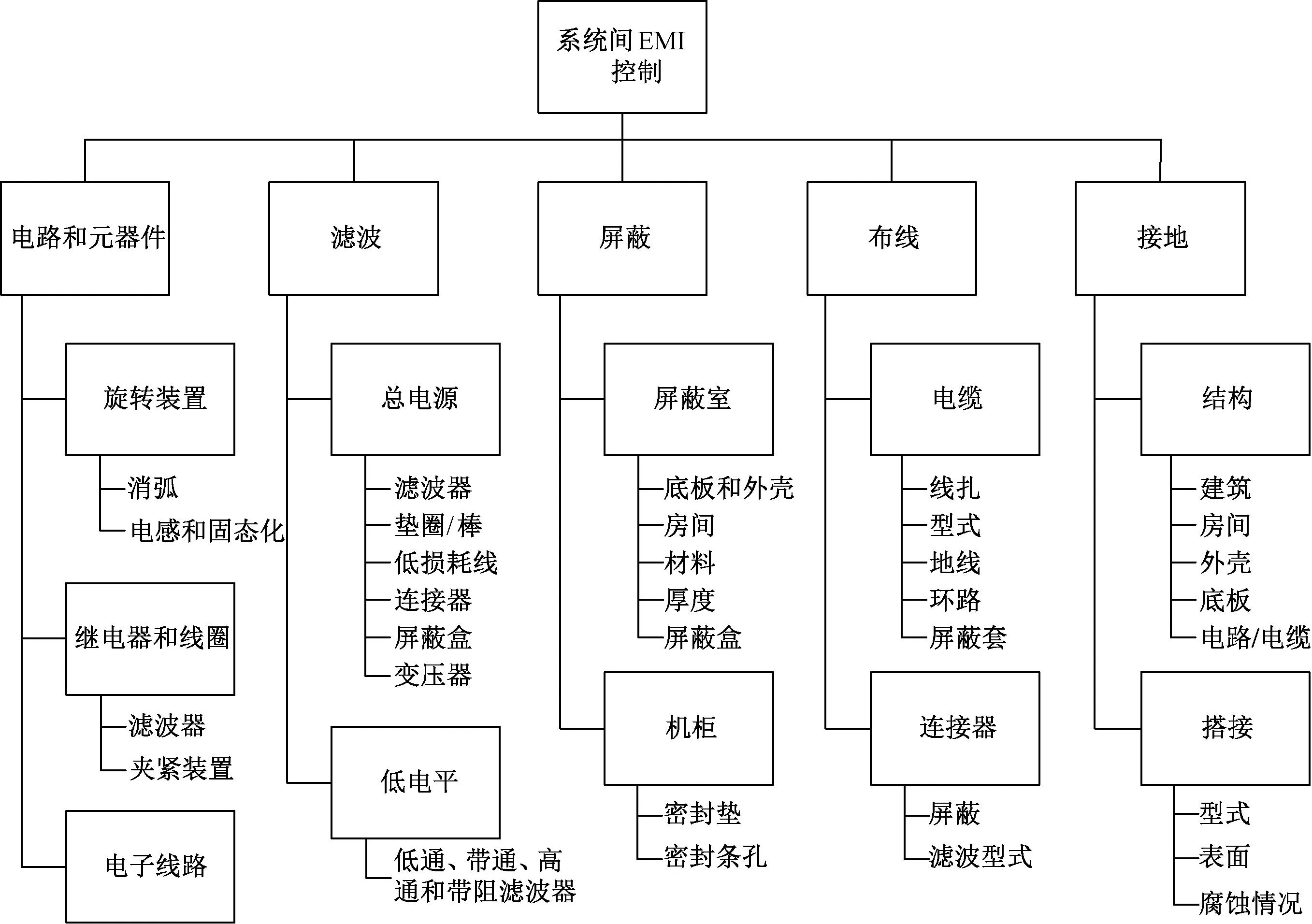
图3 电磁干扰控制技术分类
1)电路和电子元器件。此部分对于电磁干扰的影响,在前期设计阶段应充分考虑,伺服控制模块为自研模块,电路设计时充分考虑外部信号的干扰抑制,具备电源及I/O接口滤波电路,所选择电子元器件符合国家标准,采用多层电路板设计以减小电源、地的寄生电感,做到了强、弱电分区,数字、模拟信号隔离,布线间距遵循20H和3W规则,避免电场干扰和减少串扰。伺服驱动器接口电路设计有滤波电容,可将电路中的高频噪声滤除,从而保证信号的稳定性和可靠性。编码器选用外部厂家成熟产品,以RS422标准输出,控制模块发送一串时钟脉冲链,绝对值编码器响应相应的位置数据值。其由旋转变压器、解算电路和接口电路组成,解算电路实现数字量转换,由接口电路输出数字角度,但接口电路缺乏有效的滤波设计。
2)滤波。滤波是指在设备电源或信号进口端采取措施进行噪声滤除,以减少和释放干扰,可分为硬件滤波及软件滤波。电源线中谐波中频率范围很广,从10 kHz~100 MHz均有,共模干扰和差模干扰均较大,需要采用滤波器滤波。所选取的EMI滤波器具备优良的共模和差模插入损耗特性,能够抑制尖峰、瞬态干扰,减少高压电源与控制电路的相互干扰。软件滤波通过对编码器上报角度码值实现平滑滤波。AC/DC电源将+220 V(AC)转换为+24 V(DC)直接给伺服控制模块和编码器供电,+24 V(DC)电源输出无滤波器,存在的高频噪声可能导致电源上的干扰直接传导出机箱。
3)屏蔽。屏蔽是指在干扰或被干扰设备之间形成物理的电磁护层,切断或减弱干扰的电气和空间的传递。伺服控制驱动分机整机为铝合金金属机箱,上下壳体缝隙有导电橡胶条,显示屏为屏蔽玻璃且与机箱搭接良好,连接器通孔设计为圆形,降低最大开孔尺寸,降低辐射干扰,最大限度形成内外屏蔽保护,提升其内外电磁兼容性。伺服驱动器壳体采用铝合金整体成型,壳体边沿圆弧过渡,避免尖角形成发射天线,接缝和接插件缝隙的设计尽可能小,通风孔加装了蜂窝结构的通风网,增强对高频信号的衰减。
4)布线。伺服控制驱动分机内部导线均采用屏蔽导线及屏蔽双绞线,屏蔽层完全包住电缆,并良好接地。分机内部EMI滤波器和驱动器之间距离小于30 cm,电源线与信号线分开走线,避免伺服驱动器的电磁干扰耦合到I/O线缆。驱动器输出的电机驱动线上套磁环,防止高频量的发射。分机和传动座之间的电缆采用高编织密度的防波套,但是系统电缆编码器采用普通双绞线,为提高电磁兼容性应采用屏蔽双绞线。
5)接地。接地是将干扰源接地以降低对信号的干扰,或将敏感设备接地以将部分干扰引至系统整体以减少对敏感设备的影响。分机内滤波器、AC/DC隔离电源、伺服控制模块、伺服驱动器与机箱侧面或底部接触,分机自带接地柱,采用一点接地的方法与机柜接地柱连接共地。传动座内电机外壳同样接地,使得接地电阻和电感较小,防止电磁辐射泄漏,避免引入额外的干扰。
2.2 伺服传动系统干扰抑制措施及效果测试
根据以上五个方面的分析,为确定敏感设备,使用软件仿真模式观察编码器上报的角度源码,发现存在不连续跳变现象,敏感设备为编码器可能性极大。为进一步确认,逐步拔掉伺服控制驱动分机和传动座之间的3根线,发现仅拔掉位置反馈电缆时,角度跳变现象停止。使用调试用位置反馈电缆和转台上的编码器连接,无角度跳变现象,即可确认敏感设备为编码器。位置反馈电缆中包含AC/DC输出的+24 V(DC)供电及地线2根、RS422信号及地线5根,左、右电限位信号反馈线和地线3根,则干扰来源于伺服控制驱动分机,并且最大可能来源于AC/DC电源。AC/DC电源为开关电源,通过将市电整流滤波后直接将交流电变为直流电,再在高频震荡电路的作用下,用开关管控制电流的通断,形成高频脉冲电流,在电感的帮助下,输出稳定的低压直流电。开关产生的方波富有高频谐波,能通过寄生电容形成的通路传播。系统用位置反馈电缆和调试用位置反馈电缆区别在于调试用位置反馈电缆无防波套,如图4所示,由此可判断电磁干扰为传导干扰,干扰耦合途径是位置反馈电缆的金属防波套。
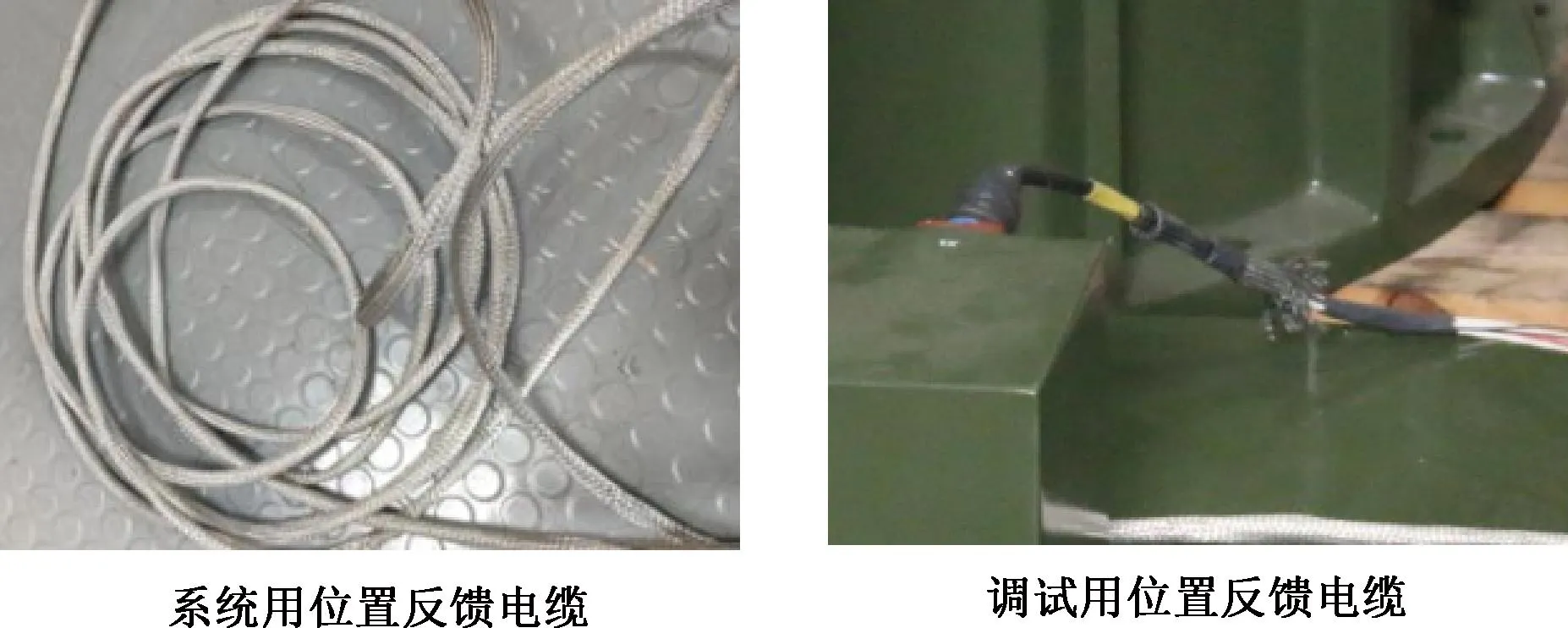
图4 位置反馈电缆区别
在系统要求改动量尽可能小、更改周期尽可能短的情况下,不考虑对AC/DC电源和编码器这两者都为外部厂家货架产品进行更改。而考虑在耦合途径上减小电磁干扰,其中AC/DC电源输出端增加滤波器,涉及到滤波器定制,机箱内安装结构变化及分机内重新走线,更改较为繁琐。同时,电磁干扰存在多种因素的叠加,因此,从屏蔽、接地、滤波三个方向采取电磁干扰抑制措施。
1)屏蔽。系统用位置反馈电缆内部RS422信号线由双绞线替换为屏蔽双绞线,屏蔽层选择具有良好电磁屏蔽效能的镀锡铜屏蔽材料,增强抗干扰性能,如图5所示。经测试,通信效果没有改善,仍存在角度跳变。
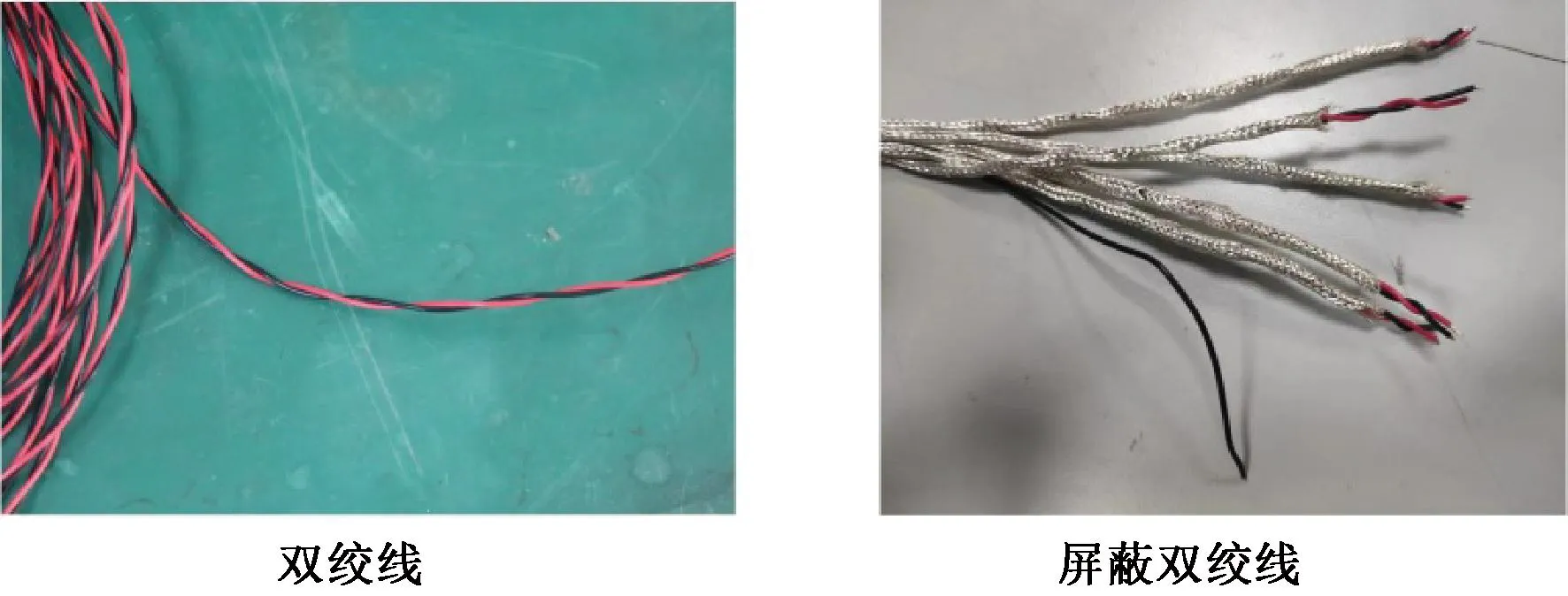
图5 双绞线替换前后
2)接地。理想状态下伺服传动系统各个组成部分的电阻都应为零。但在实际工作中,伺服传动系统各个部分的电阻不可能为零,这会形成电势差,差值越大,相互之间的影响也就越大。而良好的接地设计可以有效减小电阻,从而减小电势差,避免积累的静电对伺服传动系统造成损害及干扰。为简化电子设备内的电路结构,给易受干扰的线路增加屏蔽,降低接地阻抗及减少地线间的杂散电感和分布电容造成电路间的相互耦合,伺服控制驱动分机后面板连接器处裸露导线全部使用金属屏蔽丝网包裹,与分机机箱后面板单点接地,减小了回路面积,增强了屏蔽性能,如图6所示。经测试,通信效果没有改善,仍存在角度跳变。

图6 金属丝网加装前后
3)滤波。共模噪声模型如图7所示,由于高频信号与地之间通过寄生电容形成回路,故在原本的信号回路中多了一个等大同向的共模电流。

图7 共模噪声模型
使用EMI吸收元件来消耗共模电流是一种有效的决策,EMI吸收元件是有耗器件,在组带内吸收高频噪声的能量并转化为热量散发,起到滤波作用,可用于抑制电源线、信号线上的噪声及尖峰干扰,解决DSP等数字电路控制系统由电磁干扰引起的数据错误等问题。最常见的吸收元件是由铁、镍、锌氧化物混合而成的镍锌铁氧体磁环,具有很高的电阻率和磁导率,其等效为电感和电阻的串联,但只对单线加磁环无法有效抑制共模噪声。考虑对AC/DC电源+24 V的2根电源线各加装磁环,如图8(a)所示,要求磁环在高频段有高阻抗,选择磁环频率阻抗特性,见图8(b),其在25~100 MHz频段单匝阻抗在100~200 Ω左右。分机内加装磁环时每个绕3圈,增加在线路中的高频阻抗,见图9,加装磁环前后测试分机内AC/DC电源输出端的频谱图如图10所示。

图8 磁环阻抗特性

图9 分机加装磁环
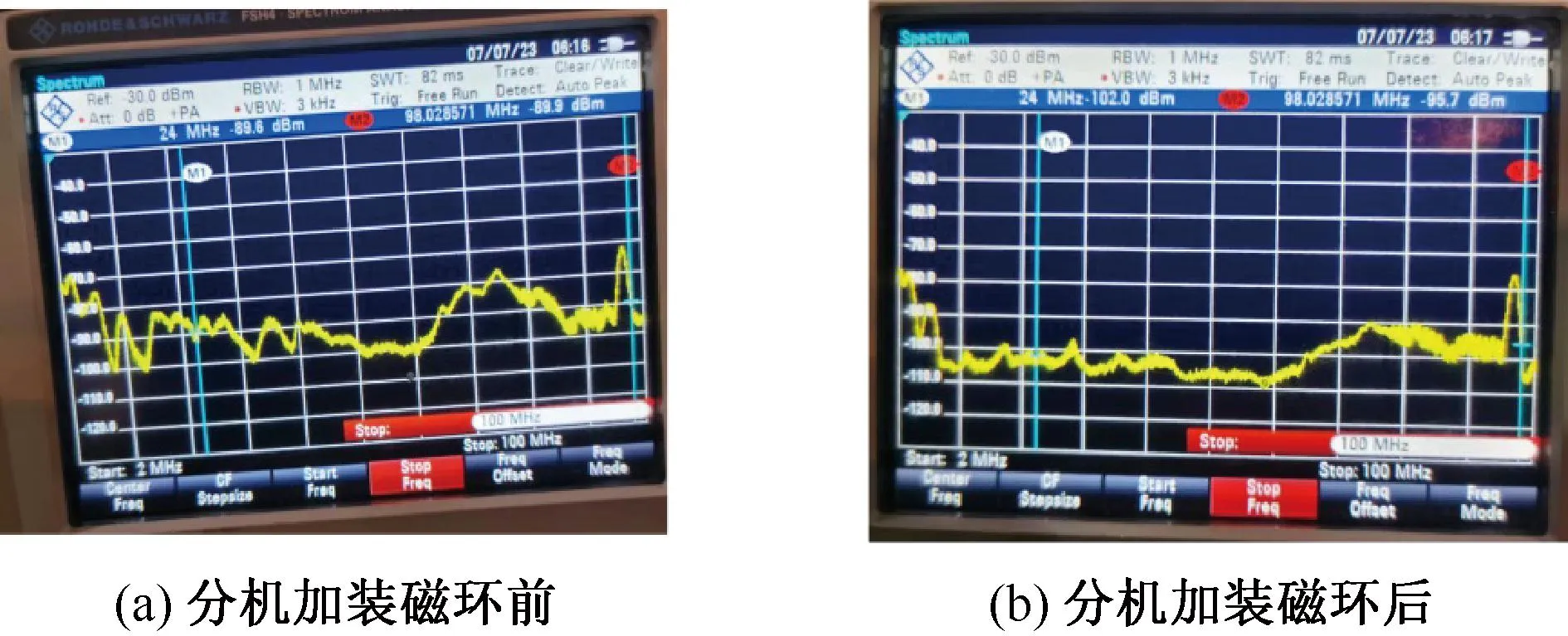
图10 加装磁环前后AC/DC电源输出端的频谱图
屏蔽和接地措施实施之后,分别进行测试,角度跳变现象没有明显改善,滤波措施加入磁环之后,1~100 MHz之间的高频噪声降低了5.8~12.4 dB(A),角度跳变现象消失。使用和校验实际测试10 000帧状态报文,接收状态信息报文10 000帧,丢包率为0,满足系统使用要求。因此,电磁干扰是因为AC/DC电源模块发射的高频噪声直接通过位置反馈电缆传导出机箱,在编码器无接口滤波电路的情况下,直接注入了编码器,导致数据传输错误,通过加入磁环,抑制了电磁干扰,使问题得到解决。
3 结 语
本文以伺服传动系统中遇到的角度跳变电磁干扰问题为研究对象,探究电路和元器件、滤波、屏蔽、布线、接地等多种因素的影响,最终定位为AC/DC电源输出的+24 V直流高频噪声对编码器差分信号的影响,在不大范围改变现有设计的情况下,使用两个磁环对电源进行滤波,1~100 MHz范围的高频噪声下降了5.8~12.4 dB(A),消除了高频噪声对编码器差分信号的影响,采集的编码器角度数据恢复正常,验证了该伺服传动系统所采取的抑制措施的有效性,可为类似情况下的电磁兼容问题提供借鉴,也提醒设计师在前期设计阶段需考虑直流电源高频噪声对信号的影响。