基于简化空间矢量调制的三电平整流器级联式无差拍控制策略
2024-04-03孙晓伟夏安俊汪凤翔
孙晓伟,夏安俊,汪凤翔
(1.福建农林大学 机电工程学院,福州 350100;2.中国科学院海西研究院泉州装备制造研究中心,泉州 362216)
0 引 言
在现代电力系统及其工业应用中,脉宽调制(PWM)整流技术是核心组成部分,广泛用于太阳能光伏发电、电动汽车充电、分布式能源系统和高速电气化铁路系统在内的众多领域[1-6]。该技术控制策略的进展主要聚焦于直接功率控制(DPC)[7]、电压定向控制(VOC)[8]及模型预测控制(MPC)[9-12]等方法。直接功率控制以其直观的功率控制策略和快速的动态响应优势,简化了控制结构,提高了系统对负载变化的适应能力。但直接功率控制在稳定运行阶段容易产生较大的纹波,影响系统的总体性能。电压定向控制通过采用比例积分(PI)控制器精确调节电压和电流,有效消除了稳态误差,确保了系统的稳定性和高精度控制。然而,电压定向控制的动态性能受到积分器设计限制的影响,在快速负载变化下响应速度不足。模型预测控制通过预测未来的系统行为来优化控制动作,提供了较好的动态性能和对复杂系统的高度适应性,能够同时处理多个控制目标和约束。
在工业伺服系统及其他高性能应用中,为提升三电平整流器的控制效能,模型预测控制作为一高效功率控制方案,已在功率转换器控制研究领域成为关注焦点[13]。与电压定向控制和直接功率控制相比,MPC展现了快速的瞬态响应、无需复杂参数整定以及多目标优化的易实现性等优势[14]。
模型预测控制分为连续控制集模型预测控制(CCS-MPC)以及有限控制集模型预测控制(FCS-MPC),CCS-MPC通过调制策略实现电压矢量的连续生成,FCS-MPC基于变换器特性构造有限电压矢量集。在三电平整流器中,FCS-MPC利用代价函数直接控制交、直流轴电流及中点电位,省略复杂调制算法,从而优化控制架构,提高系统效率[15],因此,FCS-MPC在实现高效、准确控制方面具有显著优势。
然而,FCS-MPC在实现过程中面临的一大挑战是其计算复杂性和强度。为应对这一挑战,研究人员提出了多种简化方法[16-25]。文献[16]提出低复杂度模型预测控制(LC-MPC),该策略通过减少每个控制周期内的预测次数,有效降低了计算负担,同时保持了控制的准确度。文献[17-18]使用扇区技术和简化的控制策略,减少考虑的电压向量数量,显著降低了计算量。此外,文献[19]改进的搜索算法和优化技术,如遗传算法和机器学习,也被应用于提高FCS-MPC的整体效率。虽然这些简化方法有效减轻了FCS-MPC的计算需求,但也带来了一些新的限制。例如,简化模型会牺牲一定程度的控制精度,而优化算法需要额外的调整和验证[20]。因此,在选择特定的简化方法时,需要权衡具体应用的需求和限制。
为了应对由系统参数不匹配及模型不确定性引起的干扰,文献[14]应用了最小二乘法与自适应技术,进行系统参数的实时辨别。通过最小二乘法辨识带有外部输入的自回归模型的参数,可准确预测受控变量,但算法中含有高阶矩阵的运算,计算量较大。模型参考自适应控制算法通过调整调节率来修改可变模型,目的是使其尽可能接近实际模型,以此估计必要的参数。这一方法的成功依赖于精确设计的自适应规律,为构建有效的控制系统提供了新思路。文献[15]在功率控制的内环操作中,设计了一种积分反馈调节策略以调整功率设定值,实现了功率追踪过程中无静态误差的目标。文献[16]介绍了一种Luenberger观测器的设计方法,旨在补偿电流模型中的扰动。文献[17]描述了一种方法,通过重构系统内外扰动为扩展状态变量,从而有效实现了功率控制的解耦。
本文通过对内外环路的同步优化,设计一种在线扰动补偿的级联无差拍双环控制策略,以提升系统整体性能。为实现有功功率以及无功功率的解耦控制,内环建立Luenberger观测器对功率模型扰动进行补偿。外环建立Luenberger观测器针对负载扰动进行观测,并且为了满足不同动态性能需求,引入期望周期数对外环的反馈增益进行调节。同时,分别建立常规、单预测、简化预测FCS-MPC模型,证明其等效性。最后分析不同变量约束对电压矢量决策的影响,设计空间矢量调制策略,构建简化扇区,减轻计算压力。
为验证所提出策略的有效性,本文在仿真及实际应用平台上进行了一系列测试。特别是在三电平中性点钳位(NPC)整流器的应用测试中,本方法展现了较好的性能提升,有效地证明了其在复杂电路拓扑和多元约束条件下的适用性。实验结果证明该策略在解决FCS-MPC计算问题上的有效性,同时在维持或提高控制效能方面也取得了较好的效果。
1 数学模型
1.1 三电平NPC整流器数学模型
图1所示拓扑结构为三电平NPC整流器。ea,eb,ec表示网侧的三相电压;L,R表示滤波电感、电阻;C1,C2代表滤波电容;RL则是负载电阻的标识。在电网三相电压保持平衡的前提下,利用Clarke变换,三相系统被转换至α,β两相静态坐标系中。那么三电平NPC整流器的数学模型如下:
(1)
式中:eα,eβ代表电网α,β轴电压分量;iα,iβ代表电网α,β轴电流分量;vα,vβ代表整流侧α,β轴电压分量。
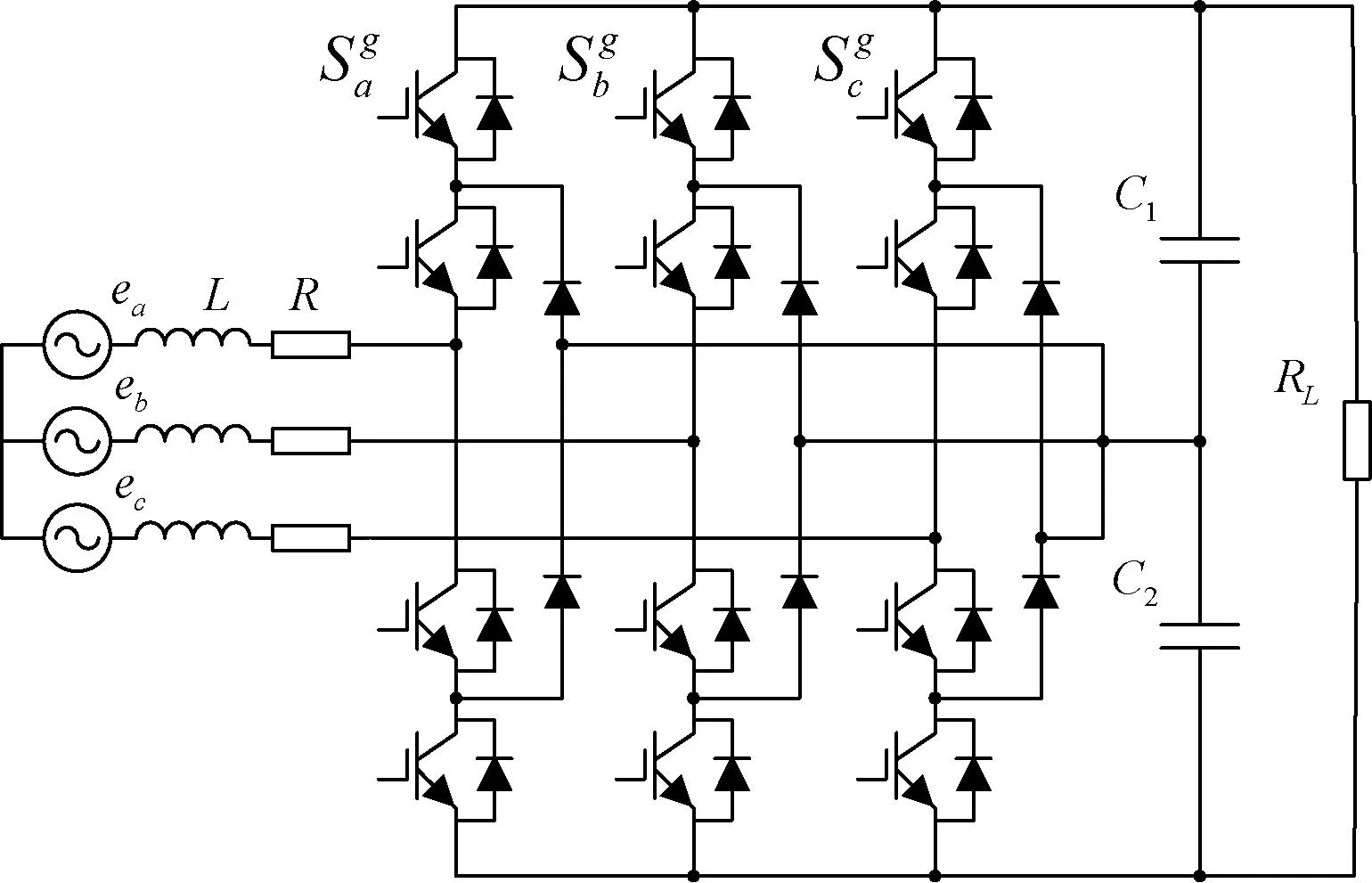
图1 三电平NPC整流器电路拓扑
依据瞬时功率理论,p代表有功功率,q代表无功功率,在两相静止坐标系下,瞬时功率的数学模型如下:
(2)
系统采样频率显著高于电网电压频率,可以认为在单个采样周期内电网电压保持恒定,由式(2)可以推导出:

(3)
在忽略电阻R影响的前提下,采用前向欧拉算法对式(1)进行离散化,系统控制周期为Ts,可以得到:
(4)
结合式(3)和式(4),计算出在连续两个控制周期之间瞬时功率的变化量:
(5)
1.2 Luenberger观测器的设计
鉴于控制模型近似处理及参数变动导致的误差,式(5)中的功率模型被重新表示如下:
(6)
式中:滤波电感表示为Lo;集总扰动表示为fp,fq;系统参数的扰动及其他扰动为εp,εq。于是,fp和fq表示:
(7)
式中:ΔL代表滤波电感的实际值和标称值之间的差异。
为了减少扰动对系统性能造成的影响,本研究基于文献[23]提出的方法,采用Luenberger观测器来估测和补偿fp,fq。此外,将功率及扰动量纳入状态变量进行考虑,并设定观测器增益为l1和l2, 设计以下形式的离散Luenberger观测器[21]:
(8)
参数l1、l2与文献[23]中一致,l1=2 000Ts=0.2,l2=-6 000Ts=-0.6。
根据无差拍控制的原理,将下一控制时刻的功率设定为参考目标,基于式(6),得出在系统扰动情况下控制电压的计算公式:
(9)
同样遵循无差拍控制原理,将下一控制周期的电压确定为参考值,据此计算有功功率的预期参考值[23]:
(10)
考虑将电压的平方项与负载功率视为状态变量,并设定h1和h2作为观测器的增益,基于这些参数,离散Luenberger观测器的设计表述如下:
(11)
因此,有功功率的参考值可重新表示:
(12)
1.3 三电平NPC整流器电压矢量
三电平NPC整流器桥臂输出的三种电平工作状态用字母P、O、N表示,一个桥臂对应3种开关状态,则可推出3个桥臂对应27种开关状态。电压矢量与开关状态满足:
(13)
式中:Sa,Sb,Sc∈{1,0,-1},每一种开关状态对应一种输出的电压矢量,则27种开关状态对应输出相应的电压矢量,由于存在冗余状态,27种开关状态对应27种基本电压矢量。开关状态与电压矢量对应关系如图2所示。

图2 三电平变换器开关状态矢量图
2 简化空间矢量调制策略
2.1 常规FCS-MPC与单预测FCS-MPC
常规FCS-MPC的一般表达式如下所示:
(14)
(15)
式中:λv=λi/KE,KE=(L/T)2,为权重因子
传统FCS-MPC的思想是选择电压矢量vn,使k+1时刻的预测电流接近其参考参考电流。那么式(4)改写:
(16)
由上式可知,如果设法令k时刻的电压矢量等于参考值,那么k+1时刻的电流就精确等于其参考值. 将式(16)代入到式(15)中,经过简单推导得出式(14)与式(15)的差异只与权重系数KE有关,即常规FCS-MPC与单预测FCS-MPC是等价的。
对于三电平NPC整流器来说,中性点电位是其约束项,在k+1时刻的中性点电位偏差描述:

(17)
式中:C=C1=C2,Δudc(k+1)为k时刻中性点电压的偏差。
对于三电平NPC整流器常规FCS-MPC的一般表达式如下所示:
(18)
对于三电平NPC整流器单预测FCS-MPC的一般表达式如下表示:
比较式(19)和式(18)可知,通过一次计算所需电压向量v*(k)消除了27倍当前预测。与两电平转换器相比,所提出的FCS-MPC在三电平NPC转换器中节省了更多的时间。
2.2 简化预测FCS-MPC
通过将27个电压矢量的空间划分为多个部分,单预测FCS-MPC可以得到进一步简化,如图3所示,定义了一个阴影六边形区域,该区域由所示电压矢量的垂直平分线组成。如果v*(k)落入阴影六边形区域,则电压向量v0,v1,v2将最接近v*(k)。如果v*(k)落入扇区I ~ VI而不是阴影六边形区域,则位于相应扇区的非零电压矢量vn将最接近v*(k)。

图3 具有当前约束的简化FCS-MPC扇区分布
简化的预测FCS-MPC控制策略如下:
1)通过式(9)计算得到v*(k);
2)根据v*(k)确认所选扇区;
3)若v*(k)落入所选阴影六边形区域,那么选择v0,v1,v2;若v*(k)没有落入所选阴影六边形区域,那么选择v*(k)在扇区的最近电压矢量。
扇区分布方法针对三电平NPC整流器也有显著的效果。附加的中性点电压约束是一个变量约束,成本函数采用电流约束和变量约束的格式,扇区分布如图4所示。
图4中包含了所有27个电压矢量对中性点电压的影响,并且针对中性点电压约束,带有相同颜色的向量拥有相同的代价函数。
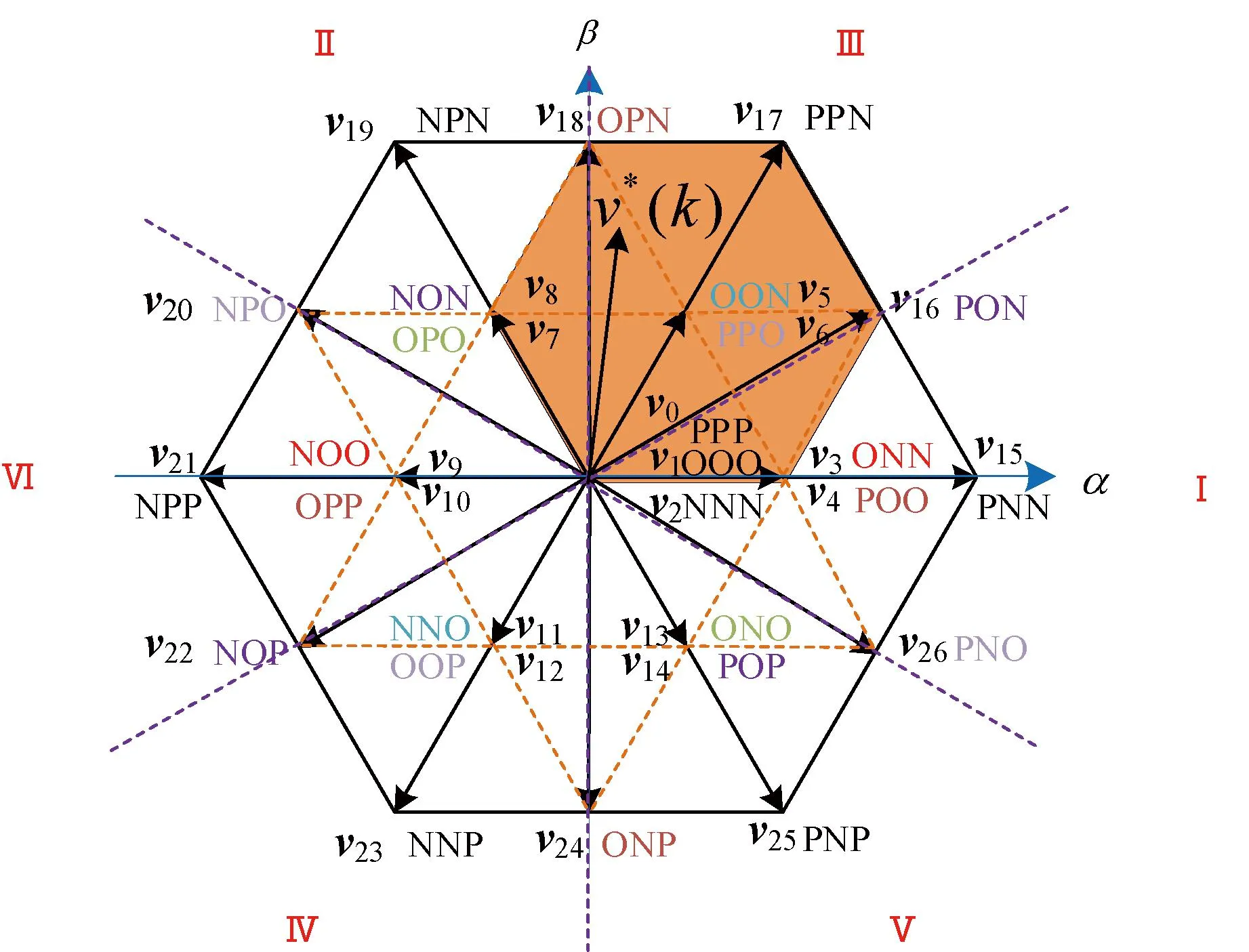
图4 带有中性点代价函数的简化FCS-MPC扇区
在考虑中性点电压约束的三电平NPC变换器的进一步简化的FCS-MPC描述为:
(20)
式中:Sel()表示属于阴影六边形区域的候选向量的编号,该阴影六边形区域由选择的扇区确定。各扇区的候选向量如表1所示。

表1 各扇区候选矢量
以扇区Ⅲ为例,当扇区Ⅲ是选择的扇区时,阴影六边形区域中的小向量v3,v4”在电流约束下具有相同的贡献,但在中性点电压约束下具有不同的贡献。v5,v6和v7,v8也是如此。通过例如Δudc(k)ia(k)<0,Δudc(k)ib(k)<0,Δudc(k)ic(k)>0等附加条件的计算,可以从候选向量中排除3个小向量,其第Ⅲ部分的候选向量如图5所示。当v*(k)位于其他扇区时,这些扇区选择的小向量如表2所示。

图5 考虑中性点贡献的第Ⅲ简化扇区
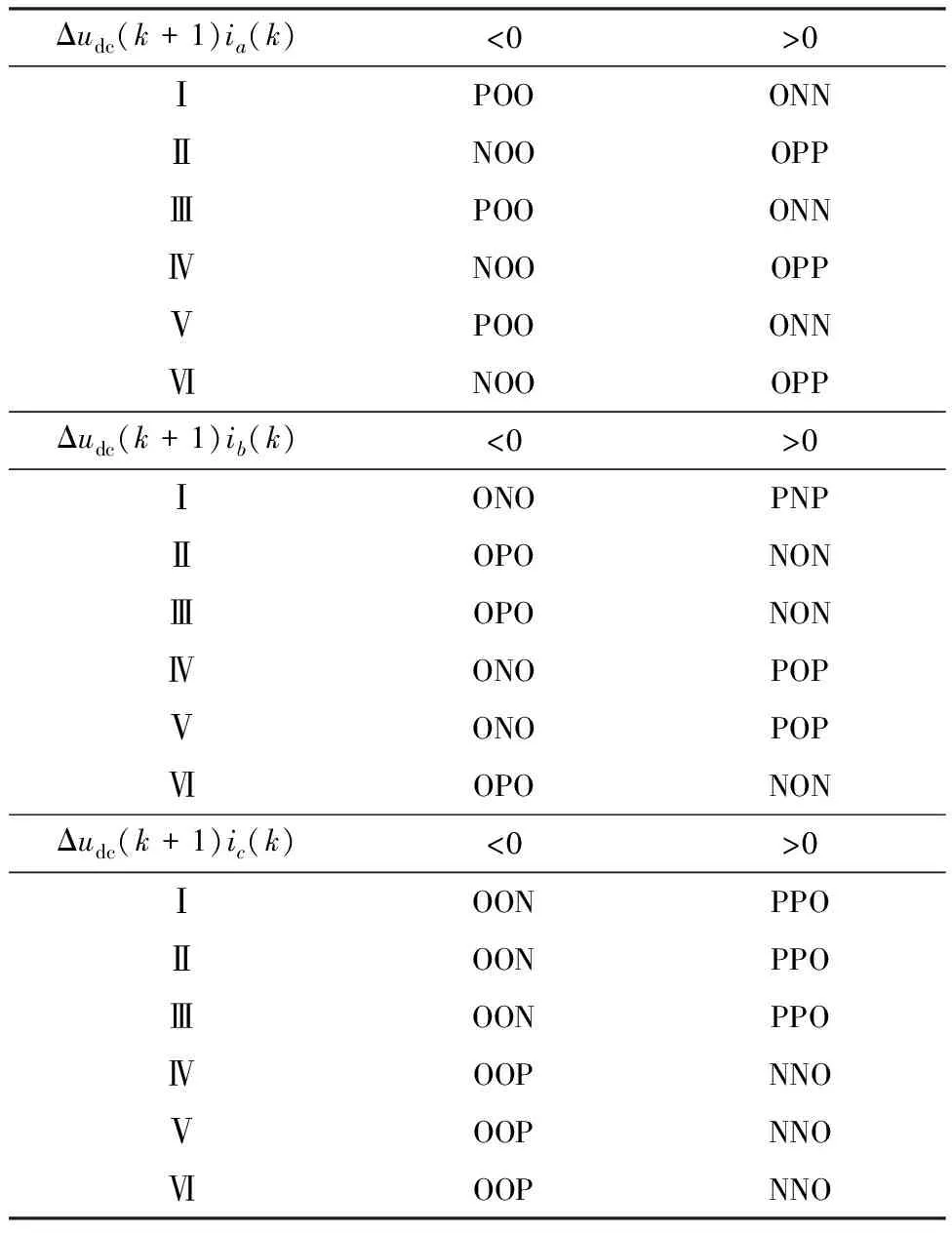
表2 附加条件下的扇区候选矢量
因此可见,需要计算并与成本函数比较的电压矢量数量减少到7个,这将较大缩短FCS-MPC的运行时间。
基于简化空间矢量调制的三电平整流器级联式无差拍控制策略框图如图6所示。外环基于无差拍控制原理构建,设计了一个控制器,该控制器以电压平方项作为反馈信号,并通过设定期望周期数这一参数来调节电压环,同时建立Luenberger观测器对负载扰动进行补偿;在内环控制中,应用了无差拍功率控制策略,并且构建了Luenberger观测器以补偿系统扰动,实现了有功功率与无功功率的有效解耦;根据参考电压识别其所在扇区,以及中点电位平衡方程,进行包含变量约束的最优矢量选择作为控制器的输出,最后生成开关状态作用于整流器。
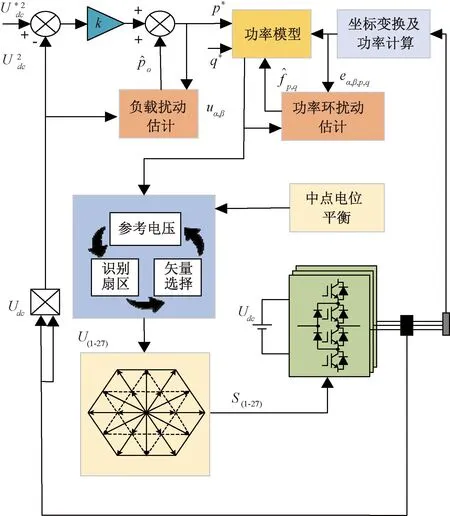
图6 简化空间矢量三电平整流器
3 仿真及实验验证
3.1 MATLAB仿真
对所提算法的有效性进行验证,在MATLAB/Simulink仿真环境下进行模型搭建,在多种运行工况下与单预测FCS-MPC进行对比。系统参数如表3所示。

表3 三电平NPC整流器系统参数
图7为整流器的加载仿真结果,三电平NPC整流器的直流侧接入100 Ω负载后,使用单预测FCS-MPC方法的直流母线电压在115 ms内达到稳态值,而简化预测FCS-MPC在经历几乎相同的时间后也达到了稳态值。仿真结果表明,所提方法对控制效果几乎不产生影响。
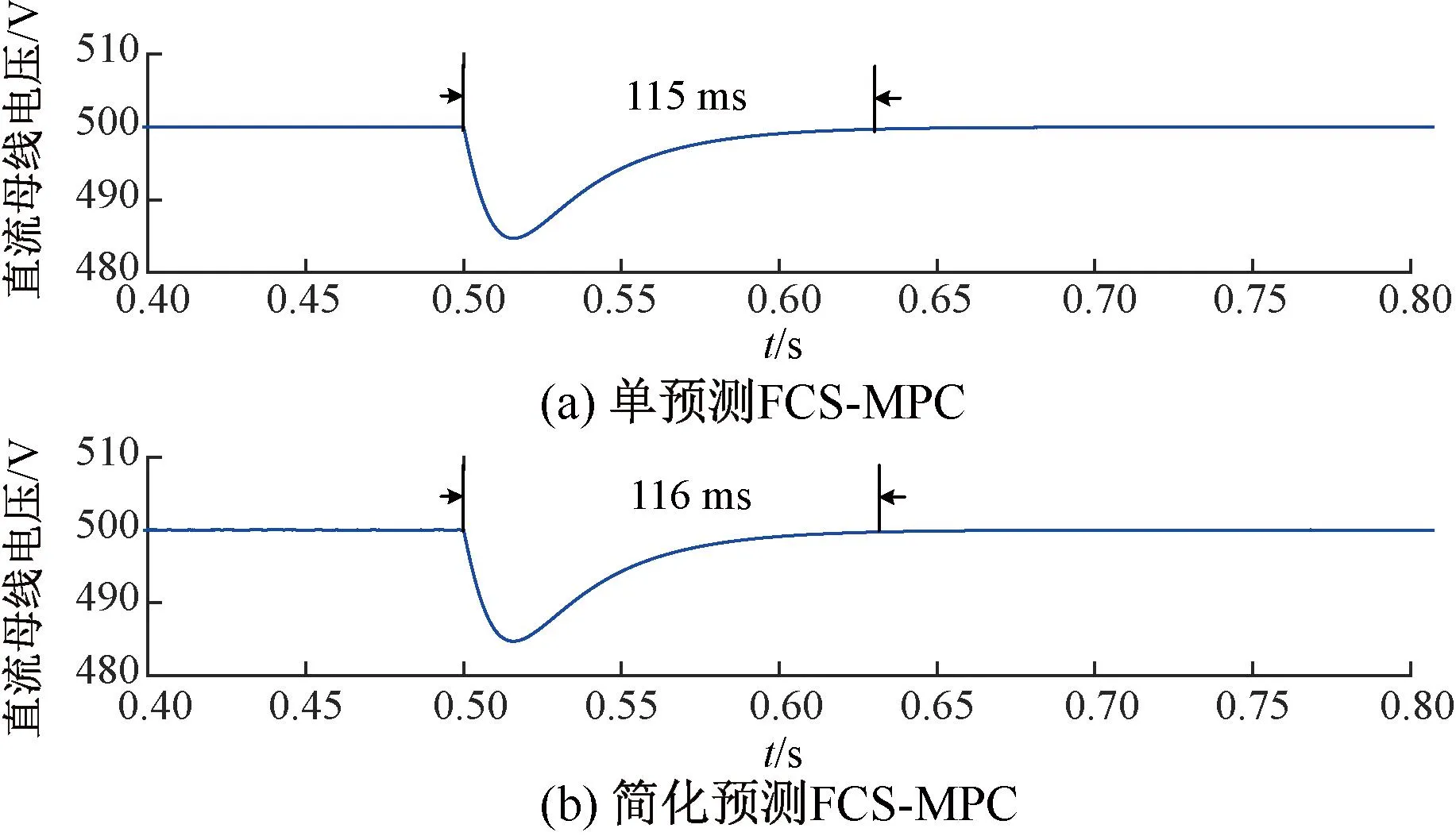
图7 加载仿真结果
如图8所示,整流平台的直流母线电压在仿真阶跃响应中呈现。当t=1 s,参考电压的幅值从500 V突变到600 V,单预测FCS-MPC和简化预测FCS-MPC分别经过约125 ms和126 ms后直流母线电压达到稳态值;在t=1.5 s,参考电压从600 V跃变到400 V,直流母线电压分别在128 ms和129 ms后稳定至其新的稳态值。从图9和图10可以看出,对采样的数据进行处理后,这两种方法的THD分析分别为2.24%、2.22%。仿真结果表明,所提的简化空间矢量调制方法,对系统的性能影响不大。
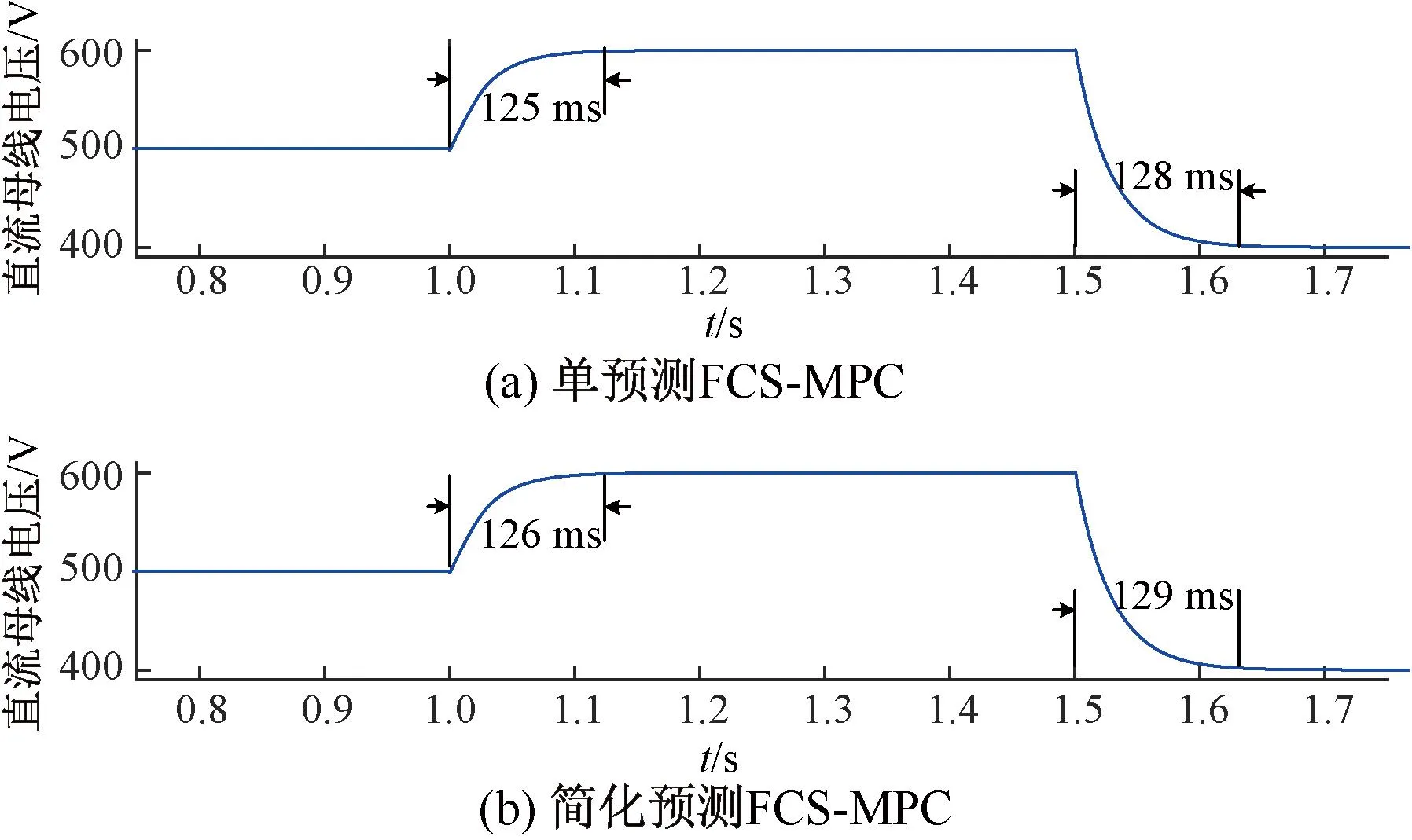
图8 直流母线电压阶跃响应仿真结果

图9 单预测FCS-MPC电流分析结果

图10 简化预测FCS-MPC电流分析结果
3.2 实验平台
为了进一步验证所提控制策略的性能,在三电平NPC整流器平台上进行实验,实验所用参数与仿真设置保持一致。如图11所示,实验平台包括三电平NPC整流器、负载电阻、示波器和上位机。实验中的核心控制板搭载了DSP TMS320F28335芯片。电流数据由电流探头获取,而其他待测量数值则通过数模转换(DA)芯片传输至示波器及上位机进行观测。
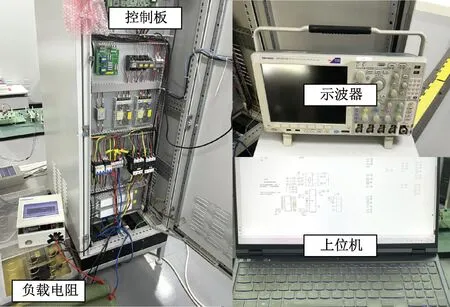
图11 三电平NPC整流器实验平台
3.3 系统运算负荷实验
为了测试本文所提策略对系统运算量以及运算时间的影响,将常规FCS-MPC算法、单预测FCS-MPC算法、简化预测FCS-MPC算法进行比较。同时,对整流器在单个周期T内设置多个阶段进行数据采集,为了便于采集数据,将单个周期T划分为五个阶段:(1)A/D转换、(2)其他算法、(3)预测过程、(4)代价函数的计算和比较、(5)剩余空闲时间,并且在每个阶段转换时给予脉冲,记录每个脉冲间隔时间。实验结果如图12所示。

图12 计算时间实验结果
简化预测算法在单个周期内计算时间快,其中预测过程控制在9 μs左右,代价函数的计算控制在10 μs左右,相较于其他算法在预测过程提升88.24%、92.59%,在代价函数的计算和比较阶段提升71.42%、81.23%。实验结果证明,所提方法可在不影响系统性能的前提下,大幅减少计算量,与预期相符。
4 结 语
为优化FCS-MPC在电力电子和电机控制运行过程中面临计算强度较大、计算速率较慢的问题,本文提出一种基于简化空间矢量调制的三电平整流器级联式无差拍控制策略。
1)构建二维离散系统数学模型,内外环均采用无差拍控制策略,分析系统在模型失配下的集总扰动,并且构建Luenberger观测器对电力扰动及负载变化进行精确估测与补偿,使无功功率与有功功率得到快速解耦。
2)分别建立常规、单预测、简化预测FCS-MPC模型。深入分析不同变量约束对电压矢量决策的影响,设计简化的空间矢量调制策略。
3)实验结果证明,提出的方法可以在不影响系统控制性能的前提下,减少系统的运算强度和计算量。
本文重点研究如何提高系统的计算速度,未深入分析三电平NPC整流器在模型失配条件下的工作情况。后续研究将进一步关注多电平整流器在模型失配情况下的表现,提高系统的稳定性。