集成化水深测量装置研发及应用
2024-03-30王文静尹学威徐健
王文静,尹学威,徐健
(1.东海航海保障中心上海海事测绘中心,上海 200090;2.上海达华测绘科技有限公司,上海 200136)
0 引言
海洋测绘是人类认知海洋的重要手段,是海洋一切活动的基础前提[1]。在相当一段时间当中,海洋测量领域中的要素都比较单一,最为主要的是深度和底质测量[2]。深度测量在水库、港口、码头、桥梁等工程建设中发挥着重要作用,在防洪减灾的应用中也显示出了巨大的经济效益和社会效益,是一项重要的工程建设技术。
随着项目建设在施工质量和施工效果要求上的不断提高,对于水域区域水深测量精度也越来越高[3]。 海洋测绘在技术应用上取得了跨越式发展,实现了测绘的数字化、智能化、自动化的发展目标,在我国海洋事业的发展中发挥愈加重要的作用[4]。单波束测深系统作为地形测量、海图绘制的主要手段之一,凭借其经济、稳定等优势在海洋测绘中一直担当着重要角色,但是受限于船舶大小、换能器吃水深度、仪器灵敏度等因素,采用该种方法获取码头前沿及下方、浅水区等一些特殊区域的水深数据十分困难,目前多采用传统的人工锤测方法进行,但是该方法准确度低、效率低。
测深仪是通过声波往返换能器面和水底的时间来间接测得水深值。声波的往返时间取决于设备中模拟电路部分的发射接收处理电路和计时器的精度。而实际上真正的水深值是换能器吃水深度+声波往返时间×声速/2 得到,由此可见,换能器吃水深度和声速成为影响测量水深精度的主要参数。但是市场上缺少能够同时测得换能器吃水深度和水下声速等水文参数的设备。为了测深系统实现测绘自动化,进一步提高测量精度,尽可能排除人为误差,设计并集成了一套可以轻松获取码头前沿及其下方、浅水区等船舶行驶受限区域水深的集成化测深装置。该测深装置集成度高,小巧轻便。在工作时可以自动获取换能器探头距离水面的深度,可自动获取水下探头所在位置的声速值以及水文参数,从而实时修正换能器水深数值,并可通过网络输出水深数据。
文章将从集成化测深装置的设计、集成化测深装置的研发、稳定性及精度校验、实践验证等方面,开展了集成化水深测量装置研发及应用的研究。
1 集成化测深装置的设计与实现
1.1 集成化测深装置的设计
设计的集成化测深装置包括3 个部分:电源模块、测深模块、水文参数测量模块。其中,电源模块为锂电池设备,主要为测深模块和水文参数测量模块供电;测深模块包括DSP 处理器、测深收发电路和测深换能器等设备;水文参数测量模块包括MCU 主控单元、时间测量单元、温度传感器、压力传感器、声速测量收发电路和声速测量换能器。
相应传感器的工作模式如下:
1) 测深收发电路的发射电路将来自DSP 处理器的控制信号经过驱动和功放后加载在测深换能器上发射出去,水底回波经过测深换能器接收后通过测深收发电路进行转换,然后输出到DSP处理器,AGC、TVG 的控制增益由DSP 处理器的DA 产生。
2) MCU 主控单元发送控制信号给时间测量单元,时间测量单元开始工作产生脉冲控制信号发送给声速测量收发电路的发射电路,经过声速测量换能器发射出去,经过声速换能器下面的挡板反射面,由接收电路接收回波信号,最后返给时间测量单元,计算出一次往返的时间差,再把时间差发送给MCU 主控单元计算声速值。
3) 压力传感器应用于测量吃水深度,通过MCU 主控单元的命令完成压力传感器的数据采样,然后再传送给MCU 主控单元计算出吃水深度。
4) 温度传感器连接在时间测量单元的端口上即可完成水下温度的测量,基于电阻对电容的放电时间,利用高精度时间测量单元的温度测量单元,完成高精度和低功耗的温度测量。集成设计分解图见图1。
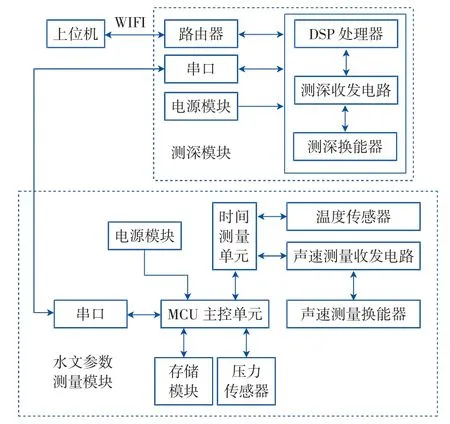
图1 集成设计分解图Fig.1 Integrated design composition diagram
1.2 集成化测深装置的实现
硬件集成采用橡胶壳体将声速仪、压力传感器、单波束换能器、线缆接头、电源指示灯、无线WIFI 电缆、带充电头有线工作电缆等集合在一起。集成化测深装置图见图2。测深装置工作时,单波束换能器实时获取探头至水面的水深数据,压力传感器实时获取探头的吃水深度,声速仪和温度传感器实时获取探头位置处的声速、温度等。结合实时声速和探头实时吃水深度可以获得精确水深数据;并把声图信息和水深数据上传(通过无线WIFI 或者有线电缆)至终端设备,实现信号的外部传输。此外,集成化测深装置内置大容量可充电的锂电池,工作时无需外部电源进行供电。

图2 集成化测深装置设计图及实物图Fig.2 Design and physical drawing of the integrated bathymetric device
2 集成化测深装置验证与应用
JTS 131—2012《水运工程测量规范》规定水深测量允许误差为±0.2 m[5],尽管0.2 m 的水深差不影响航海用图,但0.2 m 的海底地形和微地貌变化对海洋工程的设计和施工是至关重要的[6]。为了验证集成化测深装置的稳定性和精度,以误差传导理论为参照分析测量精度,对集成化测深装置的吃水深度、声速、内符合和外符合方面的测量数据进行分析和评价。
2.1 压力传感器校验
换能器吃水深度是影响测量水深精度的主要参数,集成化测深装置的吃水深度是通过压力传感器获取。校验时,使用室内的储水槽,将集成化测深装置固定在储水槽中,始终保持转换器探头吃水的深度值不变。利用钢卷尺测量得到测深装置压力传感器表面距离水面的高度值,与测深软件显示的传感器入水深度值进行对比,判断压力传感器的准确性。
进行3 次测试,入水深度分别设置为0.2 m、0.5 m 及1 m 时,测深软件显示的传感器入水深度分别为0.21 m、0.48 m、1.01 m。单次误差均在±3 cm 内。
2.2 声速传感器校验
根据声呐水下测量原理可知,声速值的准确性决定了水深测量的准确性,及时获取测量点准确的声速值是保证水深准确性的关键。
校验地点选择黄浦江某一码头前沿区域,将传统声速剖面仪与集成化测深装置绑扎在一起,然后下放至水深约0.5 m 处,静置30 s,待设备表面温度与水温趋于一致后进行声速数据同步采集。对两者采集的声速值进行比较,差值始终在1 m/s左右。
2.3 水深数据内符合比对
具体方法为:分别进行室内与室外测量数据测试,对多次测量的结果进行自身比对,以此判断其水深测量的准确性。
室内测试时使用前文所述室内的储水槽,将集成化测深装置固定在储水槽中,随后采集水深数据,采集数据过程中始终保持换能器探头吃水的深度值不变,采集一定时间的水深数据。
进行室外测试时,在已有水深测图的区域找寻一处水下地形较为平坦处,布设一条计划测线。测试时,将设备固定安装在测量船船舷边上,测量船沿该条计划测线进行往返匀速测量,利用Hypack 软件采集数据。如表1 所示,通过对往返测线水深差值比对,在52 个差值数据中,20 cm以内的差值占比100%,符合JTS 131—2012《水运工程测量规范》要求。
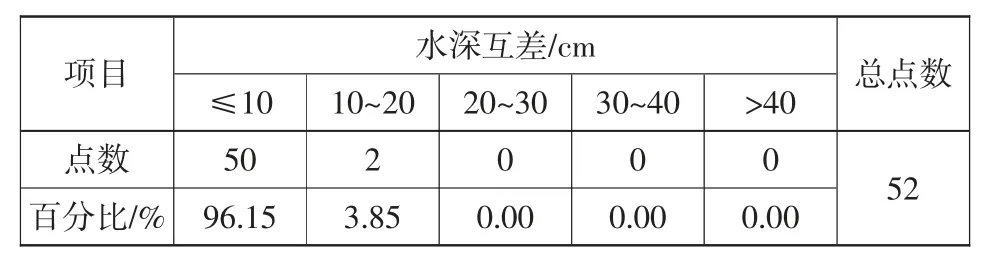
表1 内符合水深差值比对表(计划测线)Table 1 Comparison of internal compliance with the difference in water depths(planned survey line)
2.4 水深数据外符合比对
将集成测深装置与传统单波束测深系统同步测量得到的数据进行比对,以此验证集成化测深装置的可靠性和准确性。其中,集成化测深装置进行水深数据采集时,使用Hypack 软件记录测深点的位置信息和深度信息。参与比对的传统单波束测深仪选用无锡海鹰公司的HY1600 型单波束测深仪。
将集成化测深装置和传统单波束测深仪这2套不同设备安装在测量船船舷同一侧,2 套设备间距相距30 cm,两者的换能器吃水均为50 cm,认为两者同步采集的水深数据理论上一致。采集作业方法同内符合室外测试的作业方法一致。完成数据采集后,将2 个设备测量的水深成果进行差值比对。
数据经过内业编辑后,比对差值在±20 cm 以内的占比为99.68%,仅有5 个点差值在20~30 cm之间,如表2 所示。通过查看声图信息,发现比对差值较大的测量点,存在水下地形轻微起伏的情况,由于2 设备固定位置具有一定间距,故造成了个别点出现差值较大的现象。
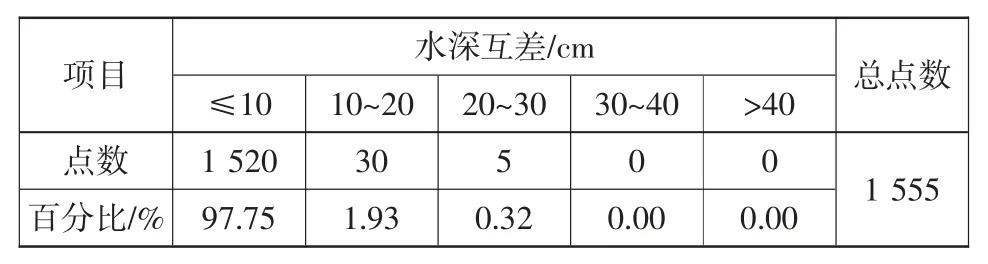
表2 内符合水深差值比对表Table 2 Comparison of internal compliance with the difference in water depths
3 应用
在黄浦江全测项目中,采用该集成化测深装置获取了船舶难以施测的码头前沿的水深数据,改变了以往人工打水砣的作业方式,降低了劳动强度,提高了效率。应用结果表明,该装置手持式作业时可进行单点打标,实时显示出测点的水深值,同时可以保存电子测深纸格式且可以回放查看。
4 结语
文章详细分析了集成化测深装置的设计、集成化测深装置研发、稳定性及精度校验、实践验证,进行了集成化水深测量装置研发,实现了集成化测深装置的应用。针对码头前沿、浅水水域等水深数据获取困难的区域,有别于传统人工测量水深的方式,利用该装置可以获取准确的水深数据。该装置具有一定的便携性,且可以自动获取吃水、温度、声速等数据,达到水深测量的精度要求,具有一定的实用性。