基于智能卸荷电路的双馈风电机组故障穿越控制
2024-03-28鲁华永袁越
鲁华永,袁越
(1.河海大学能源与电气学院,江苏 南京 210098;2.国网河南省电力公司电力调度控制中心,河南 郑州450052)
0 引言
为实现“双碳”目标[1],可再生能源发电在电网系统中得到了大力发展,风电因其资源丰富、发电成本低、建设周期短的优势得到了广泛应用。然而,随着电力系统中风电渗透率的不断提高,其对电网整体稳定运行带来了挑战。当电网发生电压下跌或骤升故障时,一方面电网因风机并网导致电压支撑能力减弱,另一方面风机为了自我保护会主动与电网解列,在两要素的作用下,进一步加剧了故障程度,甚至会导致系统崩溃。因此在电网出现故障时,风电机组的故障穿越能力愈发重要[2,3]。
在风电机组低电压穿越(Low-Voltage Ride Through,LVRT)控制上,国内外学者进行了大量研究,提出了撬棒(Crowbar)电路[4,5]。传统Crowbar保护虽有效避免了故障期间风电脱机问题,但由于其电阻值固定,电路调节能力有限,只能适用于特定故障类型,面对不同电压跌落深度时,难以保证调节效果。文献[6]提出了一种动态调节转子Crowbar阻值的LVRT方案,通过自适应控制策略对电阻值进行整定,实现不同故障下的不同电阻值投入。与固定阻值的传统Crowbar方法相比,其在抑制转子电流和直流母线电压效果上更加明显,且Crowbar投入次数也大大减少。然而Crowbar投入期间转子侧变流器闭锁,风电机组需从电网吸收大量无功功率进行励磁,造成系统无功缺额增加、直流电压升高,不利于电压恢复。文献[7]提出了一种直流卸荷(Chopper)电路和变桨距角的协调控制方案,在故障初期通过投入Chopper电路快速吸收盈余功率,同时调整桨距角彻底消除盈余功率,切除卸荷回路,有效实现故障期间的LVRT。文献[8]采用定子与电网间串联电阻、转子变流器输出无功电流方式支撑电网电压。文献[9]则在定子上串联电抗来抑制故障时电流升高,同时在转子变流器控制中附加无功控制,保证故障期间风机的无功功率支撑和电网电压的恢复。
风电机组LVRT恢复过程中,由于故障清除或负荷退出容易引发电压骤升现象,并且当单相重合闸工况出现和无功补偿设备未及时撤出造成无功功率过剩时,也会造成电网电压骤升,也就是在风电机组LVRT成功后,仍然面临着高电压穿越(High-Voltage Ride Through,HVRT)的风险。目前关于风电机组HVRT的研究成果较少,解决方案仍集中在改进风电机组变流器控制策略[10-12]和附加硬件设备[13,14]两方面。在软件改进上,文献[10]利用虚拟阻抗控制提高双馈风机的HVRT能力,然而,当转子电流超过转子侧变换器的安全裕度时,硬件部分Crowbar电路仍会被激活[11]。为避免Crowbar电路的频繁投切,文献[12]在转子侧附加转子电流抑制,同时在网侧附加外环电压控制,极大地改善了风电机组的HVRT能力。在附加硬件设备改进方法上,文献[13]在电压骤升期间通过启动Chopper电路吸收盈余能量、抑制直流侧过电压、保护直流母线电容,不足之处在于卸荷电路的频繁投切会使电流波形产生畸变,不利于电网稳定。文献[14]采用直流电压协调控制方案,通过无功电流控制和超级电容储能系统对直流过电压进行了限制,然而储能的配置使得风机的投资和运行成本大大增加。
为了实现并网风电机组高低压穿越功能需求,同时解决直流卸荷电路频繁投切和超级电容器经济成本过高的问题,本文提出了基于智能卸荷电路的风电机组故障穿越控制方案。该方法在直流卸荷电路基础上进行改进,将DC/DC控制电路与卸荷电阻相连接,通过在控制电路内引入有功功率-直流电压下垂环节,实现电路电阻吸收功率随电压波动的平滑调节。该策略同时设有LVRT和HVRT两种模式,根据并网点电压突变情况自动识别,保证风电机组在电压突增或骤降故障下均能成功穿越。所提控制方案不仅有效避免卸荷电路频繁投切引起的电压、电流波形畸变,还能在保持与超级电容储能控制同样故障穿越性能的前提下大幅度减少经济投入。
1 国内外故障穿越技术要求
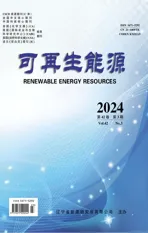
为避免故障造成风电机组解列、电网崩溃,提高电网运行的安全可靠性,世界各国针对电网运行特点、风电机组容量和线路耐压能力提出了相应的风机故障穿越能力要求。表1,2分别列出了世界主要国家风机LVRT和HVRT的并网规范。风机故障穿越并网规范主要对电网发生故障导致电压或频率波动时,风机维持并网运行的最低/高电压提出了要求,同时规定了该工况下风机保持运行的时长以及恢复至稳定电压所需的时间。
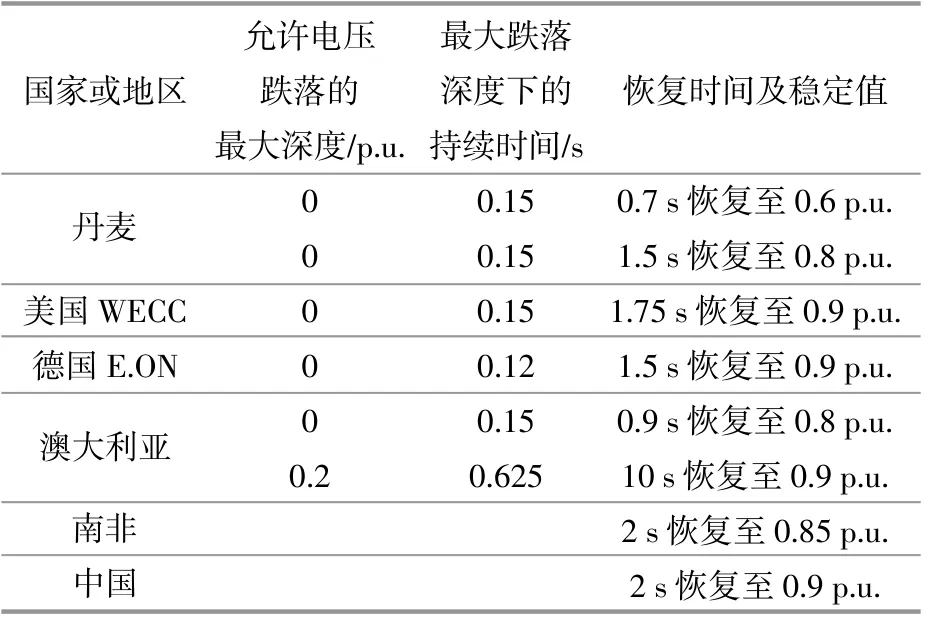
表1 部分国家或地区的LVRT技术要求Table 1 Technical requirements for low voltage ride through in some countries or regions

表2 部分国家或地区的HVRT技术要求Table 2 Technical requirements for high voltage ride through in some countries or regions
由表1,2可以看出,针对LVRT问题,国外大多数国家和地区均要求机组具备零电压穿越(Zero-Voltage Ride Through,ZVRT)能力,即因故障导致系统电压突然下降为0时,风电机组也能在0.12~0.15 s内维持并网运行,并可以在规定时间段内恢复到稳定值。而在HVRT问题上,则要求风电机组在系统电压升高到1.10~1.30 p.u.时保持一定时间的并网运行[15-17],平稳“穿越”高电压。不同国家在电压升高幅值和保持并网时间上虽有所差异,但均规定当系统电压上升到1.1 p.u.及其以下值时风机能实现不间断并网运行。
对于我国风电机组LVRT/HVRT技术要求如图1所示。曲线1为LVRT要求,曲线2为HVRT要求。

图1 我国风电机组高LVRT要求Fig.1 Requirements for high and low voltage ride through of wind turbines in China
由图1可知,当并网电压下跌至0.2 p.u.时,风机在625 ms内能维持安全可靠不脱网运行,并且能够向电网提供无功支撑,且无功电流需在75 ms内响应、持续时间不少于550 ms,进而保证并网电压能够在2 s内恢复至0.9 p.u.。当并网电压突升至1.3 p.u.时,风电机组能在500 ms内不脱机运行,并能助力并网电压升高后10 s内恢复至1.1 p.u.以下。构成了故障期间风机不脱网连续运行区域,而在曲线1以上和曲线2以下的区域内,运行风机则允许从电网切出[18]。
2 双馈风电机组故障穿越控制策略研究
双馈风电机组作为风力发电机的主流机型之一。双馈风机的定子侧与电网直接连接,转子侧通过PWM变流器与电网相连,该结构虽有效降低变流器容量成本,但相较于采用背靠背变流器与电网相连的直驱风机,不能独立于电网运行,受电网状态影响大,面对电网故障时,LVRT难度更高,控制手段更为复杂。因此,本文在研究风电机组故障穿越控制策略时,以双馈风电机组为研究对象。当电网电压发生骤升/骤降故障时,由于双馈风电机组定子端与电网直连,风机定子电压受并网点电压影响突增,依据磁链守恒定律,定子绕组上将感生出非周期、直流磁链,进而在转子侧感应出电动势。然而受到双馈风电机组变流器容量限制,转子电压不足以抵消该电动势,导致转子阻抗上产生较大的压降,引发转子电流的骤升和直流母线电压的抬高。并且在故障时为防止脱机事件发生,风电机组会通过网侧变流器向电网输送无功功率,但网侧变流器的容量有限,无功功率输出量的增加必定会导致有功功率输出量的减少,多余能量无法流出致直流母线电压升高,转子转速不受控制,危及系统的安全稳定运行。
2.1 直流卸荷电路控制
为了防止电网故障时直流母线电压的过度升高导致双馈风电机组脱网,文献[13]采用Chopper电路解决该问题,其电路原理如图2所示。

图2 双馈风电机组故障穿越控制框图Fig.2 Block diagram of fault ride through control of doubly fed wind turbine
Chopper电路采用高电压投入、低电压返回的滞环逻辑控制晶体管的通断,通过将电阻并联在风机直流母线上以消耗多余冲击功率的方式,维持了直流电压的稳定。电阻投入与否则由直流母线电压决定,当电网故障导致直流母线电压高于门槛值时,卸荷电路投入运行,Chopper电阻并联于直流母线处消耗多余能量;当直流母线电压低于门槛值或系统处于稳定状态时,Chopper电阻不投入运行。卸荷电路通过电阻频繁投切的方式,将直流母线电压维持在某一固定区间内,有效避免了直流母线电容被击穿现象的发生,但其反复投切容易引起电压、电流波形的畸变,且无法实现风机功率的平滑调节。
2.2 超级电容储能控制
超级电容器作为储能设备的一种,具有功率密度高、设备容量大、充放电时间短、循环次数多、适应温度范围广的优点,适用于故障穿越的场合[19]。基于超级电容器的双馈风机故障穿越控制策略的拓扑结构见图2。超级电容器通过双向DC/DC变换器连接在直流母线侧,通过变流器对超级电容器的充放电控制,实现过剩有功功率的吸收,维持直流母线电压稳定,直到电网电压恢复正常,电压穿越完成。当风机直流母线电压高于设定值时,DC/DC变换器工作在降压电路状态,向超级电容器充电以存储风机多余能量;当直流母线电压低于设定值时,DC/DC变换器工作在升压电路状态,超级电容器向风机放电,释放储能以提高直流母线电压。超级电容储能控制阻止了故障期间直流母线电压的升高,缓解了风机与电网间能量流动不匹配的问题,也实现了风机功率的平滑调节,但由于成本较高,不利于系统运行经济性。
2.3 智能卸荷电路控制
为了改善直流卸荷电路和超级电容器储能控制方案的不足,同时兼顾风机故障穿越能力和系统运行成本,本文提出了一种基于智能卸荷电路的风机故障穿越控制方法,通过动态调节故障期间智能卸荷电路吸收功率的大小,实现不同故障工况下风电机组的电压平稳穿越。智能卸荷电路控制原理如图3所示。
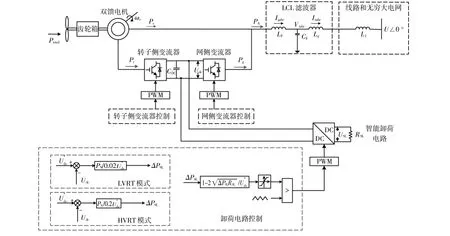
图3 基于智能卸荷电路的双馈风电机组故障穿越控制框图Fig.3 Fault ride through control block diagram of doubly fed wind turbine based on smart unloading circuit
通过DC/DC变换器将固定值电阻与直流母线电压相连。当电网电压故障导致直流母线电压升高时,并联在直流母线侧的智能卸荷电路启动,通过并联电阻消耗风机内部多余能量,直至电网电压和风机直流母线电压恢复正常,智能卸荷电路退出。智能卸荷电路弥补了直流Chopper电路无法完成有功功率平滑调节的缺陷,模拟了虚拟同步发电机控制原理,引入下垂控制环节,通过对DC/DC变流器的控制,在电路阻值固定的前提下实现吸收有功功率的动态调节。由于故障期间智能卸荷电路消耗盈余能量的多少主要由风机直流母线电压值决定,因此建立了以有功功率-直流母线电压(PSL-Udc)为联系的下垂控制,以此动态平衡风机内部有功功率,维持直流母线电压稳定。
考虑到LVRT和HVRT均会使得直流母线电压Udc升高,又由于两种情况下直流母线电压允许最大偏差不同,下垂系数KD也有所差别,因此智能卸荷电路设置了LVRT和HVRT两种模式。在下垂系数KD选择上,考虑到HVRT会导致网侧变流器耐高压调节能力达到上限,引发变流器过调制、机组失稳和功率交直流耦合振荡,因此结合风电机组HVRT范围(1.1~1.3 p.u.)及电压波动幅值(0.2 p.u.),在穿越过程中为直流母线电压留有波动裕量,按照Udc最大抬升值为0.2 p.u.设置下垂系数,进而将调制比控制在合理范围内。而在LVRT模式下,交流电压下降,不存在网侧变流器失控情况,故直流母线电压可尽量维持恒定,下垂系数以其最大偏差值设置为0.02 p.u.。本文有功功率-直流母线电压下垂控制关系式为
式中:ΔPSL为智能卸荷电路有功功率调节值;ΔUdc为风机直流母线电压偏差值;KD为下垂控制系数。
本文根据式(1)不同工况下,以直流母线电压为控制电路的输入量时,确定智能卸荷电路有功功率期望值。
占空比D计算式为
式中:ΔUSL为智能卸荷电路电压;RSL为智能卸荷电路电阻。
将功率-电压下垂控制环节输出的功率指令换算成占空比信号,与三角载波信号进行比较,产生DC/DC变流器控制电路的脉宽调制信号,控制智能卸荷电路电压USL按期望值实时调整,保证即使在电路电阻固定的情况下,电路吸收有功功率也能依据直流母线电压波动及时调整,进而实现故障期间智能卸荷电路有功功率的平滑调节。智能卸荷电路运行期间,等效电路如图4所示。变换器开关管SC1工作于PWM方式时,开关管SC2工作于二极管模式,此时可看做是Buck电路。

图4 Buck型智能卸荷电路Fig.4 Buck smart unloading circuit
实现风电机组故障穿越功能,除了维持风机内部有功功率平衡外,也需要风电机组向电网提供动态无功支撑、助力电压恢复。智能卸荷电路以现有电网对风机的无功支撑要求为依据,故障穿越期间对转子侧和网侧变流器采用了如下控制手段。
①系统正常运行时,网侧变流器采用单位功率因数方式运行,仅向电网输出有功功率。当电网电压跌落至额定电压的20%~90%时,风机开启LVRT模式,网侧变流器由单位功率运行切换为无功调节状态,优先发出无功功率,支撑电压恢复。此时,网侧变流器无功电流动态响应并网点电压波动,根据标准要求,其参考值为
式中:Ug为并网点电压标幺值;IN为网侧变流器额定电流;K1为无功电流动态调节系数,一般取值为1.5~3。
②当电网电压骤升至额定电压的110%~130%时,风机开启HVRT模式,网侧变流器处于无功调节状态,优先吸收无功功率,支撑电压并网恢复。此时,网侧变流器无功电流的参考值为
式中:K2为无功电流动态调节系数,其取值应大于1.5。
由于变流器容量有限,当开启无功功率优先模式时,无功电流输出增加,有功电流输出必然会减少。因此,为保证变流器安全运行,通过式(3)对有功功率进行限制,有功电流参考值为
式中:Imax为变流器允许流过最大电流。
与Chopper电路相比,智能卸荷电路在电阻不变的前提下增设了DC/DC变流器,而在选择DC/DC变流器额定功率时,考虑到重度故障下存在风机转子侧变流器均输出无功功率、盈余有功功率需经过DC/DC变流器流入电路电阻的工况,设置DC/DC变流器参数和转子侧变流器相同。以1.5 MW双馈风电机组为例,某厂家采用额定功率为480 kW的转子侧变流器价格如表3所示。

表3 超级电容器和变流器单价Table 3 Unit price of super capacitor and converter
智能卸荷电路大约需增加经济成本38.4万元。相较于超级电容器控制,智能卸荷电路在控制电路变换器不变的前提下,用固定阻值电阻替代超级电容器。超级电容器控制策略选择参数时,考虑到风机故障穿越时间较短(一般不超过2 s),超级电容器容量设为480 kW×2 s,额定功率与变流器相同为480 kW,其经济投入约为73万元。智能卸荷电路虽比Chopper多投入了变流器成本,但保证了风机功率的平滑调节,并且相较于超级电容器控制,经济成本大大降低。
3 仿真验证及分析
本文在Matlab/Simiulink系统中搭建了图3的双馈风机并网模型,对所提故障穿越控制策略进行验证。双馈风电机组参数如下:额定功率为1.5 MW,额定频率为50 Hz,机端额定电压为690 V,直流母线电压为1 150 V。定子电阻为0.007 06 p.u.,定子漏感为0.171 p.u.,转子电阻为0.005 p.u.,转子漏感为0.156 p.u.,互感为2.9 p.u.。
本文分别设置了电压跌落、电压骤升、轻度故障、重度故障工况进行仿真分析,同时将智能卸荷电路的电压穿越效果与Chopper电路、超级电容器储能控制方案进行对比,从直观数据上验证智能卸荷电路故障穿越控制的可行性与优势。
3.1 轻度故障
设置3 s时电网发生电压突增或骤降的轻度故障,故障持续时间0.4 s,电压变化幅度均为15%。图5显示了风电机组在轻度LVRT,HVRT时直流侧母线电压、网侧变流器输出功率、定子功率的仿真结果。
图5 轻度LVRT/HVRT风电机组仿真波形Fig.5 DFIG Simulation waveform in mild LVRT/HVRT
由图5可以看出,当电网电压跌落至0.85 p.u.时,直流母线电压上升至1 250 V,直流电压变化幅度未超过设定上限值。因此,无论是Chopper电路、超级电容器控制电路或是智能卸荷电路,均不投入运行,并网点电压和风机运行参数变化曲线完全一致。而当并网点电压抬升至1.15 p.u.时,直流母线电压有轻微下跌,但此时风机故障穿越控制电路仍然不启动。因此,3种控制方案下风机功率、电流参数基本一致,与风电机组无故障穿越控制相同。由仿真结果可以看出,在轻度故障下,由于直流母线电压的变化未超过上限值,因此3种故障穿越控制电路均不启动,风机运行状况相同。
3.2 重度故障
图6为系统在3 s时电网电压骤降至0.2 p.u.、发生持续时间0.4 s的重度故障时,双馈风电机组在Chopper电路、超级电容器控制和智能卸荷电路控制下的仿真结果。
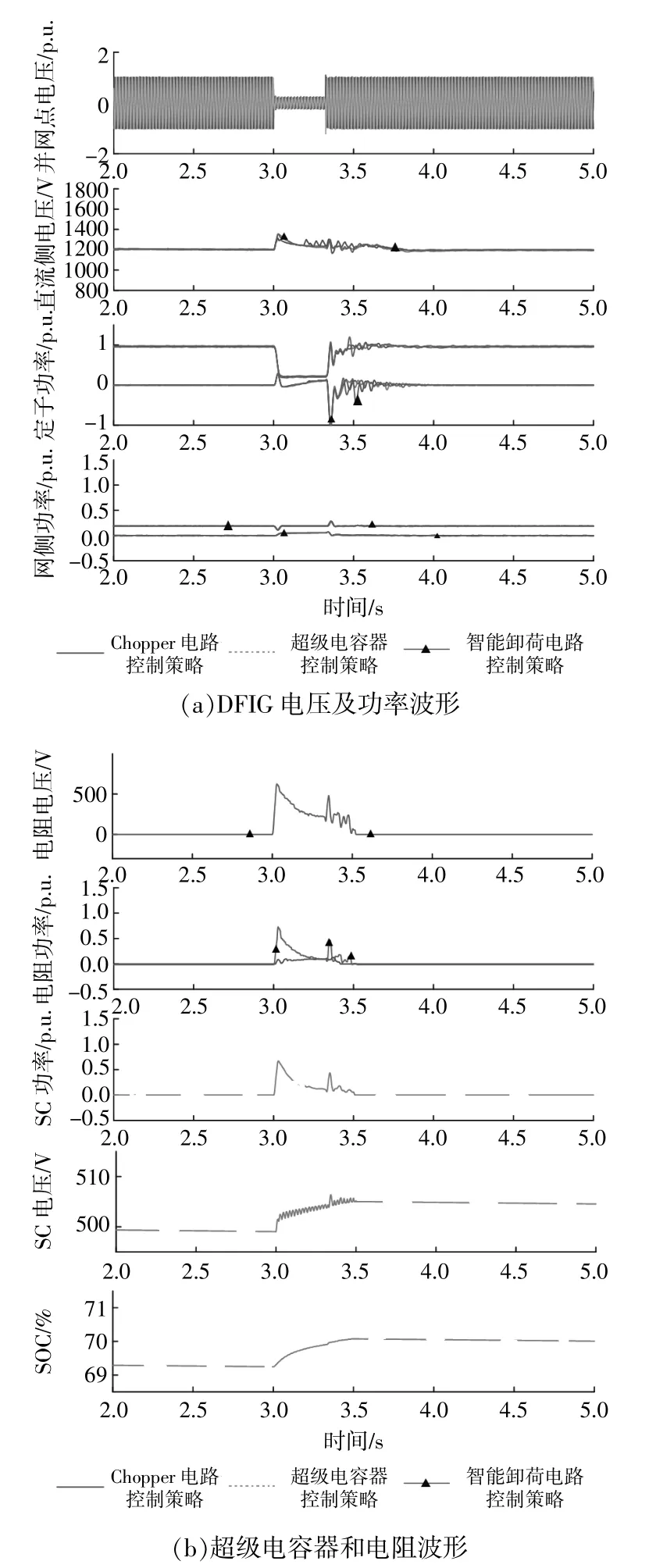
图6 低电压重度穿越故障仿真波形(电压跌落至0.2 p.u.)Fig.6 Simulation waveform of low voltage severe ride through fault(voltage drop to 0.2 p.u.)
由图6可知,在电压跌落至0.2 p.u.的重度故障下,Chopper电路启动,流经电路电阻的功率也随之增加,最高值可达0.12 p.u.。故障期间,直流侧母线电压在1 180~1 320 V波动,有效抑制了直流母线电压大幅度升高,也使得网侧和定子输出功率较为稳定,保证风电机组并网不脱机运行。采用超级电容器控制策略时,通过增加超级电容器电压及其荷电状态(State of Charge,SOC)吸收多余能量,故障结束后超级电容器电压由500 V升高到了505 V,SOC增加了1%,系统通过网侧变流器向超级电容器充电以平衡风机内部有功功率,从而实现了双馈风电机组的低电压故障穿越。采用智能卸荷电路控制时,电路中电阻两端电压随着直流母线电压的波动而变化,其变化趋势基本一致。当直流母线电压在3.1 s达到最大值1 370 V时,电路电阻电压为610 V,吸收功率达到最大值0.71 p.u.,通过电路电阻吸收多余能量,使得风机直流侧母线电压得到了明显的抑制,实现了重度故障下风电机组的LVRT。
设置电网电压在3 s时骤升至1.3 p.u.,故障持续0.4 s,图7显示了重度故障下3种控制方案的仿真结果。


图7 高电压重度穿越故障仿真波形(电压抬升至1.3 p.u.)Fig.7 Simulation waveform of high voltage severe ride through fault(voltage rises to 1.3 p.u.)
由图7可知,直流母线电压峰值超过了1.1 p.u.,为了防止直流母线电压过高而损坏其他硬件装置,Chopper电路投入运行,通过提高电路中电阻功率来平衡系统能量,增加风电机组运行可靠性,电阻功率最高达到了0.11 p.u.。3.4 s时直流母线电压低于设定的下限值,Chopper电路自动切除,风机故障穿越结束。超级电容器在故障导致直流母线电压超过设定值即3 s时启动,其电压和SOC缓慢增加,实现双馈风电机组的高电压故障穿越。而在故障切除后,超级电容器退出运行,其电压和SOC分别在605 V和69.5%保持恒定,系统恢复正常运行。当双馈风电机组采用智能卸荷电路实现机组故障穿越时,电阻电压随着风机直流母线电压的上升而增加,流经电阻功率随着电压波形变化相应上升,在3.39 s时达到峰值。从仿真波形上看,直流侧母线电压相较于固定阻值的Chopper电路和超级电容器控制得到了较为明显的改善,最大值由1 410 V降到了1 290 V,风电机组实现了高电压故障穿越的能力。
3.3 对比分析
为了更为清晰直观的对比转子卸荷电路、直流Chopper电路、超级电容器控制和智能卸荷电路的仿真效果,图8~10分别给出了上述4种控制策略下风电机组在重度HVRT/LVRT故障过程中并网点电压Us、定子功率Ps和Qs、网侧功率Pg和Qg以及直流母线电压Udc等参数的最大偏差量、平均偏差量和恢复过程调节时间的对比。
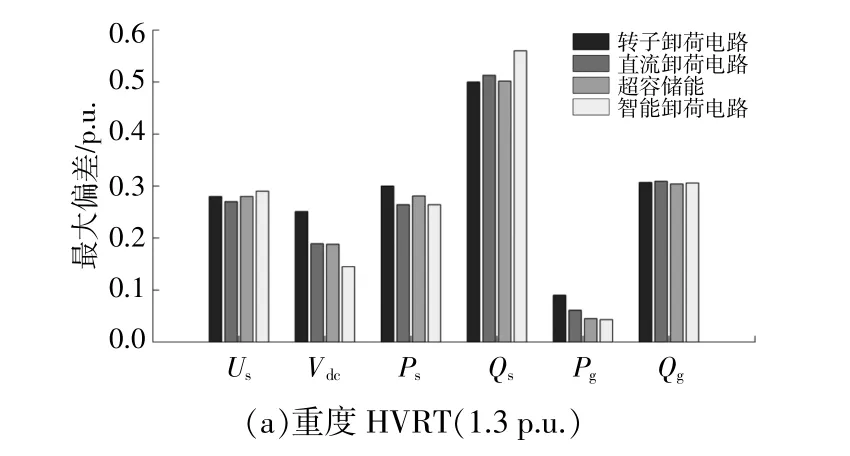
图8 不同控制下风机故障穿越参数最大偏差量Fig.8 Maximum deviation of DFIG fault ride through parameters under different control strategies
由图8可以看出,无论是重度HVRT或LVRT故障,4种控制方案的网侧无功功率Qs及并网点电压Us的最大偏差量几乎相等,HVRT下Qs最大偏差为0.31 p.u.,Us最大偏差为0.28 p.u.,LVRT下Qs最大偏差为0.13 p.u.,Us最大偏差为0.8 p.u.。而对于直流侧母线电压Udc,4种控制方案相差较大,HVRT下智能卸荷电路的Qs最大偏差值最小,为0.15 p.u.,相较于转子卸荷电路几乎下降了50%,调节效果大大提高。LVRT下,Qs偏差值最大的仍是转子卸荷电路,为0.21 p.u.,智能卸荷电路和超级电容器储能控制效果相当,为0.17 p.u.,略高于Chopper电路。对比说明,在Qs波动幅值上,智能卸荷最为稳定,转子卸荷电路变化幅度最大。
图9显示了故障穿越过程中风机参数的平均偏差量。

图9 不同控制下风机故障穿越参数平均偏差量Fig.9 Average deviation of DFIG fault ride through parameters under different control strategies
重度HVRT工况下,4种方案的并网点电压Us和转子侧无功功率Qg平均偏差量相当,分别为0.25 p.u.和0.28 p.u.,而在网侧有功功率Ps和转子侧有功功率Pg上,转子卸荷电路的平均偏差量最大,是其他3种方案的2倍。直流母线电压Udc和网侧无功功率Qs平均偏差量最少的是智能卸荷电路和超级电容器控制,分别为0.09 p.u.和0.41 p.u.。重度LVRT工况下,Chopper电路、超级电容器控制和智能卸荷电路的风机参数平均偏差量均相等,且Udc和Qs均明显优于转子卸荷电路。从风机参数的平均偏差量看,智能卸荷电路和超级电容器控制在故障穿越过程中的整体波动较为平稳。
图10对比了4种电压穿越控制方案下风机故障后恢复稳态所需时间。

图10 不同控制下风机故障穿越恢复过程的调节时间Fig.10 Adjustment time of DFIG fault through recovery process under different control strategies
重度HVRT下,直流母线电压Udc恢复稳定用时最短的是智能卸荷电路和超级电容器控制,需要0.4 s,优于Chopper电路的0.58 s和转子卸荷电路的0.98 s。网侧功率恢复稳定用时最短的仍是智能卸荷电路,4种方案的转子侧功率用时相当,为0.11 s。重度LVRT工况下,转子卸荷电路的Udc、定子侧功率所需调节时间最短,其次为智能卸荷电路,但在网侧功率参数上,转子卸荷电路恢复稳态用时最长为0.78 s,其他3种方案用时在0.58 s左右。
综合对比图8~10重度故障下风机穿越过程中的参数,智能卸荷电路的直流母线电压抑制效果最佳,功率波动幅值最小,且能在最短时间内完成恢复调节,电压穿越方案最具优势,超级电容器控制其次,且明显优于其他两种方案。
图11对比了重度故障工况下,双馈风电机组转子侧变流器的电流波形。

图11 重度故障下DFIG 3种方案转子侧变流器波形对比Fig.11 DFIG rotor side converter waveform comparison of three schemes under severe fault
由图11可见,智能卸荷电路和超级电容储能方案的转子电流波形较为平缓,故障期间电流波动幅值小、次数少,而Chopper电路控制方案由于频繁投切产生了直流电压纹波,进而使得电流波形畸变严重。因此,综合对比风电机组直流母线电压抑制效果、电压恢复所需调节时间、转子电流畸变程度以及控制方案经济成本等多种因素,所提基于智能卸荷电路的风电机组故障穿越控制策略最具优势。
4 结论
本文结合Chopper电路和超级电容储能控制的优势,提出了基于智能卸荷电路的风电机组高低电压故障穿越技术方案。所提方法对Chopper电路进行改造,通过DC/DC变换器将卸荷电阻与风机直流母线相连,并在控制电路中设置有功功率-直流电压下垂环节,使得智能卸荷电路能够根据直流母线电压幅值动态吸收盈余能量,具有平滑调节卸荷功率的能力。同时依据并网点电压波动情况自动开启LVRT或HVRT模式,保证双馈风电机组在不同故障下均能成功穿越。本文在仿真系统中搭建了单机并网场景模型,对比了3种不同故障穿越方案的动态响应性能。结果表明,重度故障下,所提智能卸荷电路方案的故障穿越控制效果可以与超级电容控制方案相媲美,有效避免了Chopper电路频繁投切引起的直流母线电压波动以及网侧电压、电流波形畸变,也大大降低了经济成本。