基于YOLOv4的客车转向架部件漏油故障图像检测
2024-03-25李海霞徐彦恒
李海霞 徐彦恒
摘 要:作为车体主要部件的铁路客车转向架是列车运行安全保障的关键部件,目前主要依靠客车故障轨旁图像检测系统检测出转向架故障并分类定位,但存在一定漏检和误检,检测准确率无法保证。基于此,针对客车转向架常见的关键部件漏油现象,展开漏油区域视觉图像缺陷检测研究,提出一种改进的YOLOv4目标检测算法,使用k-means++聚类方法获得更匹配关键部位漏油区域目标的候选框参数,更准确地识别和定位漏油区域目标。在网络中将部分标准卷积替换为可变形卷积,提高目标检测的准确性。
关键词:客车转向架;深度学习;故障检测;YOLOv4;检测精度
中图分类号:U279.3+23 文献标志码:A 文章编号:2095-2945(2024)08-0049-05
Abstract: As a main component of the carbody, the railway passenger car bogie plays a crucial role in ensuring the safety of train operations. Currently, the detection of bogie faults relies mainly on the trackside image monitoring system, which detects and classifies bogie faults. However, this system suffers from certain shortcomings, including missed detections and false alarms, leading to a lack of accuracy in fault detection. In response to this, this research focuses on the visual image detection of common oil leakage issues in key components of passenger car bogies. An improved YOLOv4 object detection algorithm was proposed, utilizing the k-means++ clustering method to obtain candidate box parameters that better match the oil leakage areas in key components. This approach aims to achieve more accurate identification and localization of oil leakage areas. In the network, part of the standard convolution is replaced by deformable convolution to improve the accuracy of target detection.
Keywords: passenger car bogie; deep learning; fault detection; YOLOv4; detection accuracy
鐵路运输在现代社会交通运输系统中起着至关重要的作用。其中,铁路客车转向架[1]作为车体主要部件,是列车运行安全保障的关键部件,对其进行故障检测十分重要。随着客车速度不断提升,易受到磨损、硬物撞击,加上零部件多样化极易出现各类故障,任何细微故障都可能导致重大事故发生。开发一套智能客车故障检测系统实现精准、高效的列车故障检测具有重要意义。目前,我国对于普速客车动态检测主要依靠客车故障轨旁图像检测系统(TVDS)[2],该系统可在客车关键部位的图像中检测出转向架故障并分类定位,但检测准确度较低,存在一定漏检和误检,高精度的实时检测有一定困难。
近年来,基于深度学习的客车关键部位目标检测技术得到不断发展,能自动检测和标注客车关键部位图像中故障的位置和类型,预判可能存在的故障,减少事故发生。因此,采用深度学习方法提升客车可视部位故障检测的精度和速度具有实际意义。基于深度学习的目标检测方法主要分为两大类,一类是基于回归的目标检测算法,如YOLO系列[3]、SSD等[4];另一类是基于候选区域的检测算法,如R-CNN[5]、Fast R-CNN[6]、Faster R-CNN[7]等。基于深度学习的检测方法在铁路故障、缺陷检测中已得到了应用。如Liu等[8]针对列车运行接触网紧固件松动、缺失缺陷,提出了通过YOLO算法实现紧固件定位,并通过深度卷积神经网络DCNN实现紧固件故障识别。Yao等[9]利用密集卷积网络,并结合迁移学习实现车辆底部异物检测。张江勇[10]融合Inception网络和深度残差网络设计出新的基础网络,在动车可视部位图像中检测出故障并分类定位。杜家豪等[11]提出一种基于联邦学习(Federated learning)的转向架全局故障诊断方法,解决了单一线路高速列车(HST)转向架缺少足量故障数据特征而导致故障诊断模型泛化能力有限的问题。赵江平等[12]针对小尺度螺栓检测方面存在的问题,提出改进Faster R-CNN检测的客车关键部件图像缺陷检测算法,解决缺陷目标定位不准确的问题。李利荣等[13]针对列车底部零件难以检测的问题,提出了一种基于OSE-dResnet网络的列车底部零件检测算法。
虽然上述检测算法在检测列车各类故障问题上有了一定研究,但在列车关键部位常见漏油区域检测的问题上研究较少。本文根据转向架可视部位区域常出现的油压减震器漏油等车辆常见故障作为研究目标,主要针对漏油部位的形式不同,漏油范围形状差异大等问题,提出一种改进的YOLOv4客车可视部位漏油故障检测方法,相较于原YOLO算法,提高了检测精度。
1 客车转向架故障图像检测
在基于深度学习的列车部件漏油故障检测中,存在图像背景较为复杂、不同尺度漏油区域检测等挑战。为了解决相关问题,并进一步提高检测精度,本文研究了一种基于改进的YOLOv4的列车关键部件漏油故障目标检测构架。首先介绍了目标检测模型(CSPDarknet53)的主干框架,核心模块Cross-Stage Partial Layer (CSPLayer)包含一个大卷积核,使检测网络能够更全面精确地捕获信息。为了应对适应列车部件漏油尺度几何变化加入了可变形卷积,使得检测网络检测精度进一步提高。
1.1 YOLOv4目标检测算法
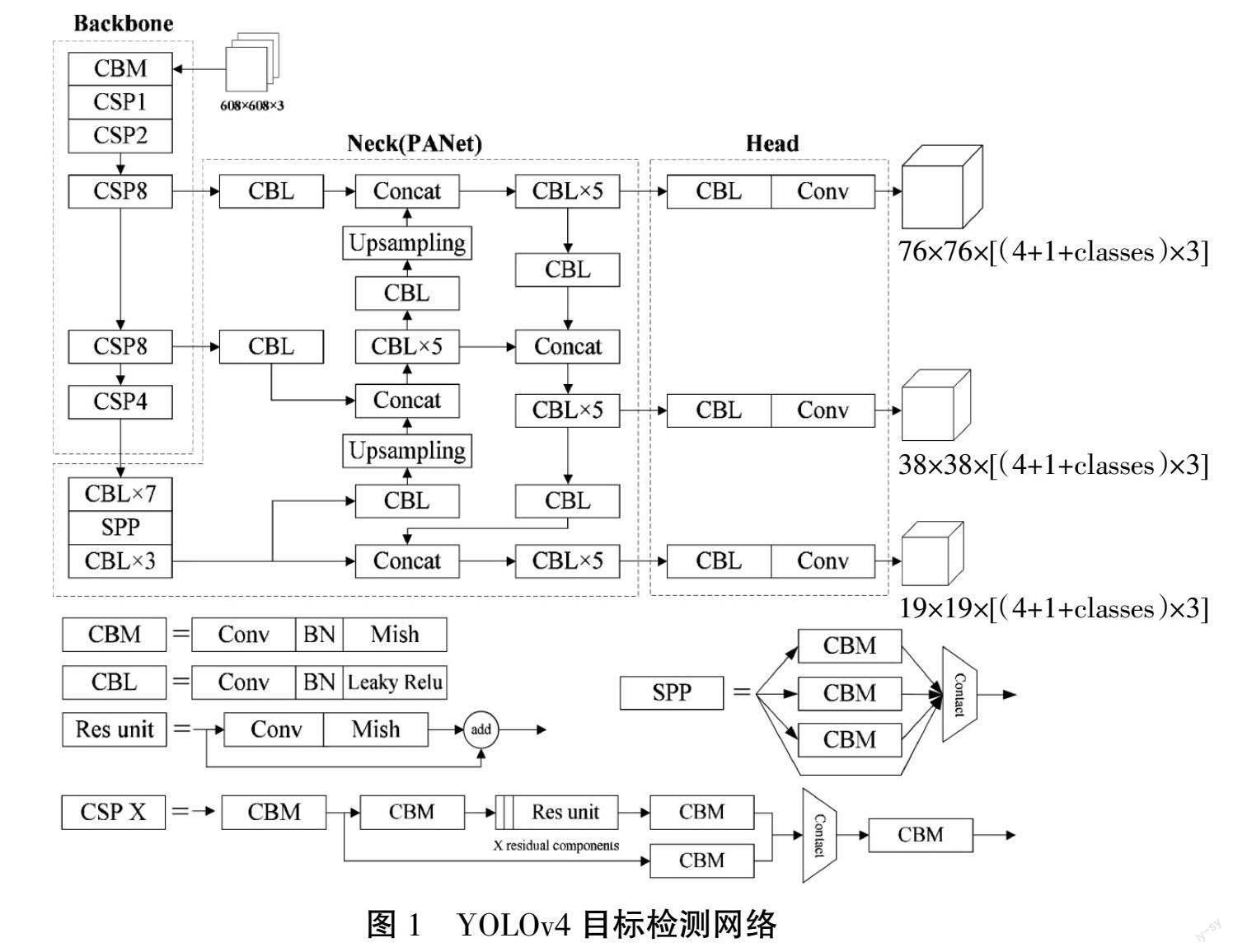
YOLOv4[14]是近些年來颇受欢迎的一种高效、强大的目标检测算法,网络结构如图1所示。该算法框架包括输入部分、CSPDarknet53主干网络、PANet特征增强模块和检测头(Dense Prediction)4个部分。
1.1.1 输入数据增强
算法数据增强采用Mosaic方式,随机拼接4张训练图像。这样增加了小目标数据集,提高了网络的鲁棒性。同时,也显著减少了对Mini-batch的需求。采用自对抗训练SAT在原样本上加入一些轻微的扰动,从而表现出更好的泛化性能。
1.1.2 主干网络Backbone
主干特征提取网络采用CSPDarknet53[15],是在YOLOv3的Darknet53网络结构的基础上引入了CSP模块结构。主干特征提取网络CSPDarknet53经过CBM模块、CSP1模块、CSP2模块和CSP8模块获得第一层特征,后经CSP8模块获得第二层特征,再经CSP4模块获得第三层特征,最后进入目标检测模块(图1)。其中,CBM模块由卷积层、批归一化层BN和Mish激活函数构成。CSP模块由CBM模块和残差模块Res构成。CSP模块先将特征映射分为2个分支,再将这2个分支进行concat融合,这样在轻量化网络、降低内存成本的同时,可保持主干网络提取特征信息的准确性。
1.1.3 特征增强模块Neck
模块Neck由空间金字塔池化SPP结构、特征金字塔网络FPN、路径聚合网络PANet构成。SPP对特征层使用3种大小的卷积核进行最大池化操作,在不降低网络运行速度的同时增加了感受野。PANnet从特征网络提取低、中、高不同特征图,再引入自底向上的路径,传达定位特征,更好地融合不同层网络的特征信息,从而进一步提高特征提取的能力。
1.1.4 检测头Head
YOLO Head的目的是利用得到的特征进行预测。首先由主干网络部分提取特征信息,然后由Neck部分进行特征的语义表示,最后通过CBL模块和卷积运算得到19×19、38×38、76×76尺度的预测特征图,分别用于大、中、小物体预测。YOLOv4通过引入缩放因子,解决了当预测特征图中真实物体质心非常接近网格边界时,预测坐标难以预测真实坐标的问题。在边界框位置计算损失时用CIoU代替了MSE,作为Bounding box的损失函数,公式如下
LCIoU=1-IoU++α·v , (1)
式中:IoU为预测框和真实框之间的交并比;ρ2(.)为欧氏距离;Actr、Bctr分别为预测框和真实框的中心点坐标;c为2个框最小包围框的对角线长度;α·v为长宽比的惩罚项系数,α为一个正数,v用来衡量长宽比一致性的参数,具体定义如下
v=(arctan-arctan)2, (2)
α= , (3)
式中:wgt和hgt为真实框的宽和高;w和h为预测框的宽和高。
1.2 模型优化
1.2.1 先验框设计
YOLOv4使用锚框机制,生成目标检测的先验框。原始算法的检测对象为人物等通用类型,锚框(anchor)尺寸并不适用于本文检测目标任务。通过对实验数据集分析,漏油区域的尺度主要集中在30~190像素之间。为了涵盖漏油区域的不同尺寸,提高检测精度,使用K-means++聚类对训练集中的漏油标注区域进行分析。实验确定了9组anchor,(32,31),(28,81),(43,66),(64,57),(68,176),(97,131),(143,143),(140,294),(209,297),平均分配到3个预测尺度的特征图。经过K-means++聚类优化后生成的anchor更适合数据漏油区域尺寸,生成质量更高的正样本,提高模型的检测准确率。
1.2.2 可变形卷积
本次检测任务的漏油区域的尺寸和形态多样,可在模型预测网络中适当引入可变形卷积[16](Deformable Convolution Networks,DCN)。为了在保证算法速度几乎不变的情况下,仅在CSPDarknet53网络中CSP4的3×3标准卷积替换为可变形卷积。可变形卷积是通过附加的卷积层,从特征图进行学习,在规则网格R上增加一个偏移量。{?驻pn|n=1,2,…N},N∈|R|,偏移是通的。因此,变形以局部、密集、自适应的方式以输入特征为条件。使卷积核的形态更贴近漏油区域形状。传统卷积和可变形卷积过程如公式(4)、(5)所示
y(p0)=w(pn)x(p0+pn) , (4)
y(p0)=w(pn)x(p0+pn+?驻pn) , (5)
式中:p0为输出的特征图上的每个位置;w(pn)为采样点的权重;pn为R所列位置的枚举值。
可变形卷积随着关键部件漏油区域形态变化来自动地改变采样点位置,增强定位能力,改变感受野范围。如图2所示。
2 实验结果及分析
本文实验环境平台为Intel(R)Core(TM)i7 9700 CPU,64 GB内存,64位Windows10操作系统;训练使用GPU为RTX-1080Ti(32 GB),深度学习框架为Pytorch1.7.0,Python版本为3.7。
2.1 数据集制作
本文实验数据来自于现场TVDS采集图像,采集范围主要包括:铁路客车车体底部可视部件(车体底部及转向架制动装置、轮对、车钩装置)、侧部可视部件(侧部裙板、转向架及轴箱、摇枕及弹簧、油压减震器和车端连接部等可视部位)。数据集的制作流程包括图像裁剪、图像标注和增强。首先,采集到列车可视部位原始图像分辨率為1 024×1 028像素,由于计算资源限制,采用图像分割处理为算法608×608像素。其次,采用LabelImg软件标注制作VOC格式数据集。最后,送入检测网络进行Mosaic数据增强,增加数据样本多样性。本次实验共采集列车可视部位含有漏油故障图像2 825张,经过软件标注,生成VOC数据集格式。在YOLOv4的Mosaic数据增强下,每批导入4张图片,进行随机翻转、缩放等增强拼接组合成新的图片。
2.2 评价方法
YOLOv4目标检测精度指标有准确率(Precision, P),召回率(Recall, R),计算见式(6)—式(9)。转向架可视部件按照是否漏油分为有漏油故障(正样本)和无漏油故障(负样本)图像,属于二分类目标。因此,TP(True Positive)为正样本,即检测到的漏油故障标识为漏油故障样本,否则是错误的正样本FP(False Positive)。FN(False Negative)是把检测到的漏油故障标识为无故障样本。
P=,(6)
R=。(7)
平均准确率(Average Precision, AP)为P-R曲线下方的面积,计算如式(8)所示。平均准确率均值(mean Average Precision, mAP)是所有类别的平均准确率的均值,计算如式(9)所示
AP=P(R)dR,(8)
mPA=APi,(9)
式中:N为类别数量。
2.3 结果分析
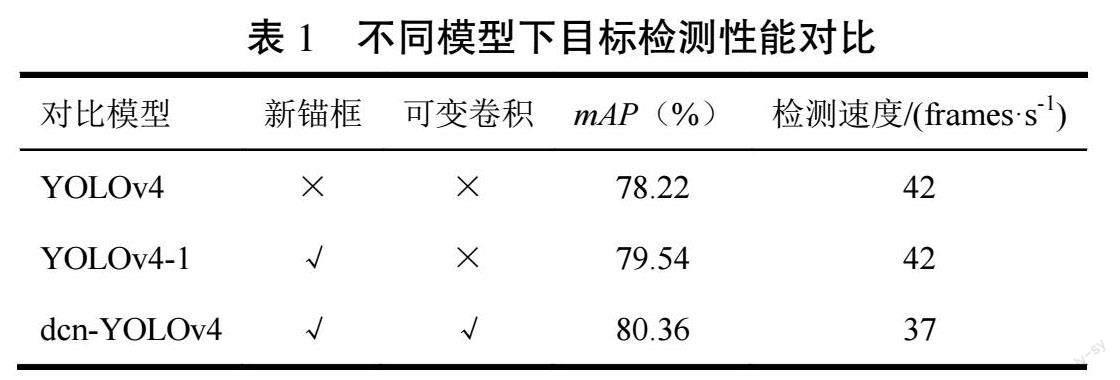
为了进行充分的对比实验,分别对YOLO模型、计算新锚盒后的YOLO模型YOLOv4-1、本文提出的dcn-YOLOv4模型进行训练。设置实验训练Epoch为100,初始学习率为0.001,Batchsize为4,衰减系数为0.000 5,动量为0.9。对测试集的图像进行目标检测,得到检测的平均精度与检测速度,实验结果见表1。
从表1中可以看出,使用聚类获得新的锚框,有更高的交并比,因此比起YOLOv4原算法mPA小幅提升。加入可变形卷积的dcn-YOLOv4比原始YOLOv4算法检测速度有所下降,但是仍然能达到实时效果。检测精度提高了2.14个百分点,表明添加的可变形卷积模块可对客车部件不同形状和尺寸的漏油区域进行特征的有效提取。
从实验结果可以看出dcn-YOLOv4 模型在牺牲了较小检测速度的情况下,有效提升了模型的检测精度,满足了客车转向架关键部位漏油故障的检测要求。
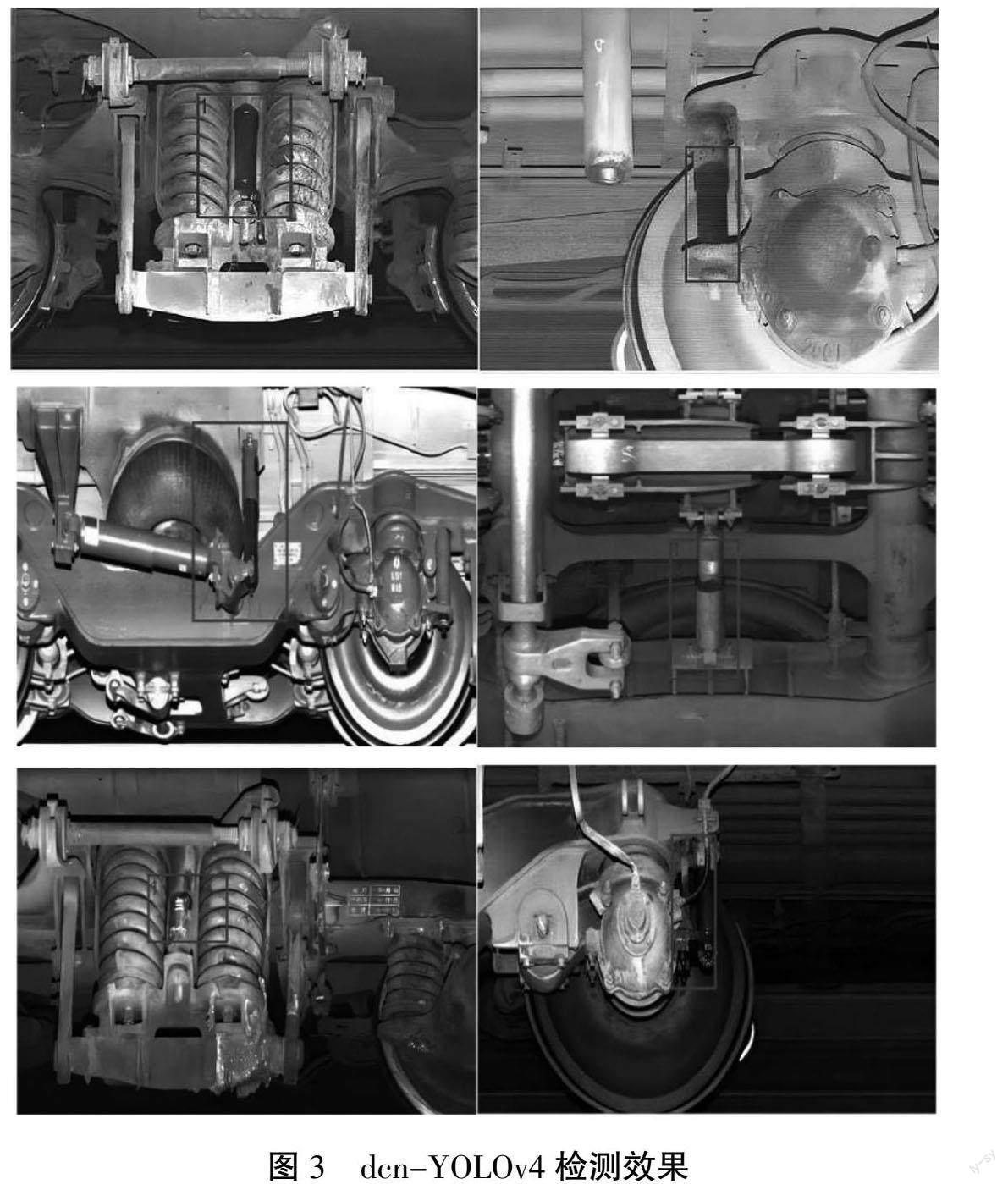
测试数据集的检测效果,如图3所示。从图3中可以看出,dcn-YOLOv4模型能较好地识别出油压减震器等关键部位的漏油位置。
3 结束语
本文基于YOLOv4目标检测框架,开展客车转向架关键部件图像故障检测的研究。使用k-means++聚类方法获得更匹配关键部位漏油区域目标的候选框参数,更准确地识别和定位漏油区域目标。在CSPDarknet53网络中将部分标准卷积替换为可变形卷积,提高了目标检测的准确性。根据现场TVDS采集图像数据集上的实验结果表明,该模型相比原YOLO算法,目标检测表现出更好的性能。在接下来的工作中,还需保证在不降低模型计算速度的前提下,更好地提高本方法的检测效果。
参考文献:
[1] 吴昀璞,金炜东,黄颖坤.基于多域融合CNN的高速列车转向架故障检测[J].系统仿真学报,2018,30(11):4492-4497.
[2] 肖齐.铁路客车故障轨旁图像监测系统(TVDS)统型机设计及运用[J].铁道机车车辆,2018,38(1):43-45.
[3] JOSEPH R,SANTOSH K D,ROSS B. Girshick,AliFarhadi. You only look once: unified, real-time object detection[C]//Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition,2016:779-788.
[4] JIA S, DIAO C, ZHANG G, et al. Object Detection Based on the Improved Single Shot MultiBox Detector[J].Journal of Physics: Conference Series, 2019, 1187:042041..
[5] ROSS B,GIRSHICK,JEFF D,et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition,2014:580-587.
[6] ROSS G. Fast R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision,2015:1440-1448.
[7] REN S Q,HE K,GIRSHICK R,et al.Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks[J]. IEEE transactions on pattern analysis and machine intelligence. 2017,39(6):1137-1149.
[8] LIU Z,ZHONG J, YANG L, et al. Location and fault detection of catenary support components based on deep learning[C]//IEEE2018 International Instrumentation and Measurement Technology Conference,2018:1-6.
[9] YAO Z, HE D, CHEN Y, et al. Inspection of Exterior Substance on High-Speed Train Bottom Based on Improved Deep Learning Method[J]. Measurement, 2020(163):108013.
[10] 张江勇.基于深度学习的动车关键部位故障图像检测[D].成都:电子科技大学,2019.
[11] 杜家豪,秦娜,贾鑫明,等.基于联邦学习的多线路高速列车转向架故障诊断[J].西南交通大学学报,2024,59(1):185-192.
[12] 赵江平,徐恒,党悦悦.基于改进Faster R-CNN的铁路客车螺栓检测研究[J].中国安全科学学报,2021,31(7):82-89.
[13] 李利荣,王子炎,张开,等.基于OSE-dResnet网络的列车底部零件检测算法[J].计算机工程与科学,2022,44(4):692-698.
[14] BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: Optimal Speed and Accuracy of Object Detection [C]//IEEE conference on Computer Vision and Pattern Recognition,2020: 2004.10934.
[15] WANG C Y, LIAO H Y M, WU Y H, et al.CSPNet: A New Backbone that can Enhance Learning Capability of CNN[C]//2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW).IEEE, 2020.
[16] DAI J,QI H,XIONG Y,et al. Deformable convolutional networks[C]//Proceedings of the IEEE international conference on computer vision,2017:764-773.
海洋石油勘探開发中,固定式导管架平台是目前最为经济且技术最为成熟的平台之一,导管架平台开发的难点在于大型导管架的安装,此类导管架下水的方式通常采用滑移下水。在这一过程中,摇臂作为重要的受力结构,承担着为导管架提供支撑力和保护导管架主体结构的重要作用,是保证下水成功的关键。摇臂在导管架下水过程中随水平角度的变化而发生翻转运动。然而,由于摇臂通常重量较大,导致摇臂复位成为一个挑战性任务,需要综合考虑安全、稳定和效率等因素。这种导管架滑移下水后摇臂的复位问题,不仅对驳船自身的强度提出了更高的要求,也对摇臂复位技术提出了更为精确和严格的要求。那么该类摇臂使用什么方法复位,如何更高效,更安全复位,就成为了工程实际中急需解决的问题。
1 背景介绍
导管架滑移下水是海洋石油勘探开发中常用的下水方式之一,它具有成本低、操作简单、适用范围广等优点。然而,滑移下水的过程中,导管架及其附属结构所承受的力学性能要求极高,其安全性和稳定性是下水成功的重要保障。摇臂作为导管架的一个重要受力结构,承担着支撑导管架和保证下水成功的关键作用。
在现有的摇臂复位方法中,常规的方法需要大量人力和物力,操作风险高;而自动化复位方法虽然可以提高效率,但需要高成本的设备支持,对于很多企业而言难以承担,而且自动复位方案还有摇臂与导管架主体结构碰撞的风险[1]。本研究以驳船海洋石油229为例,针对摇臂复位问题,通过复位方案和工具的优化设计,并通过实际操作验证复位效果,旨在提供一种可靠有效的解决方案,为滑移下水过程中摇臂复位带来创新思路和方法。
新设计摇臂复位专用门字框导向结构。系固缆系固于摇臂首部吊轴,由麻绳固定在摇臂上,待导管架下水后,系固缆另一端通过八字扣连接过桥缆,过桥缆上端通过钩头缆由浮吊船起吊,起吊力通过门字框发生变向,从而完成摇臂复位。
2 方案介绍
2.1 复位方案所需结构与物料
方案中主要构成要件如图1所示。
海洋石油229:运输驳船,负责导管架的运输,滑移下水等工作。其参数见表1。
海洋石油201:负责提供复位力。其参数见表2。
摇臂:在导管架滑移下水时能够随导管架水平角度的变化而翻转,从而分散导管架局部应力,减小压强,保护导管架主体结构[2]。
门字框:改变复位力方向,作用相当于定滑轮。
系固缆:?椎80×28 m高强缆,一端系固于摇臂首部吊柱,沿摇臂预布,用麻绳固定,另一端固定于甲板。待导管架滑移下水后,与过桥缆用“八字扣”连接。
过桥缆:?椎80×20 m高强缆,连接系固缆与钩头缆。
钩头缆:?椎80×10 m高强缆,上端直接连接钩头,下端通过150 t卡环连接过桥缆。
2.2 复位方案
在本方案中,系固缆从门字框中通过,门字框起到万向滑轮的作用。顶部滑动滚轴套在门字框上,以减小缆绳与门字框之间的摩擦。此外,为了避免卡环无法通过门字框的问题,系固缆和过桥缆采用了“八字扣”连接方式。综合HYSY229船艉处甲板面布置,基于DP动力定位浮吊船进行的摇臂复位作业的特点,考虑复位过程中摇臂受力分析,复位门字框设计结构形式如图2所示。门字框布置在驳船滑道的两端,整体布置如图3所示。
摇臂复位详细过程如下。
1)随着导管架完成滑移下水,摇臂倾斜到最大角度85°,此时系固缆经由八字扣形式连接到过桥缆,过桥缆上端用卡环连接钩头缆,钩头缆上部连接到提升钩头。如图4所示。
在工程实际中因为卡环体积过大难以通过门字框,因此,使用八字扣连接(图5)系固缆和过桥缆,简化施工过程,且有效地减少了摩擦力。
2)提升钩头力,扯断系固缆固定麻绳,使八字扣通过门字框。如图6所示。
3)继续提升钩头力,浮吊提供的复位力逐渐将摇臂复位,在这个过程中回复力为摇臂浮力和缆绳拉力,倾斜力为摇臂结构重力和摇臂内水重力,图7所示时刻为摇臂与水线面夹角45°。
随着摇臂角度逐渐回复,钩头施加的回复力与摇臂接近垂直,拉力力矩达到最大值,浮力逐渐减小。摇臂的倾斜力包括摇臂重力和压载水重力力距也在逐渐减小。图8所示为摇臂与水平面角度为30°。
角度减小到30°以下,重心位置回落到驳船一侧,重力变为回复力,浮力完全消失,倾斜力为摇臂水重力。继续提升钩头高度,载荷逐渐减小,直至摇臂水平,此时摇臂复位完成。如图9所示。
2.3 关键节点计算
为了分析摇臂的受力状态,本研究选取85°、45°、30°和0° 4个关键节点作为样本,计算摇臂上的各个作用力,包括摇臂自身重力、进水舱内水的重力、摇臂浸水部分的浮力、浮吊提供的复位力,以及转轴处驳船提供的支持力。其中摇臂的重心X=FR0+1 967 mm;Y=0;Z=13 434 mm,其总重量为716 724 kg。摇臂重心位置如图10所示。
摇臂各部分构件的重量重心见表3。
以搖臂处于45°时的状态为例,摇臂受力分析如图11所示。
根据力矩平衡原理,浮吊的提升力P=(G1×L1+G2×L2-G3×L3)/L,具体受力计算见表4。
浮吊所能提供的最大拉力为800 t,远高于所需的浮吊提升力,符合工程要求。
为了确保门字框足够强度以承受负荷,本文使用ANSYS进行有限元分析,进行强度校核[3]。将250 t的负荷施加到框架平面偏转18°的方向上,结果显示极限强度因子UC为0.90,强度满足工程要求[4]。
2.4 优势分析
相比于原方案[5],采用绞车+滑轮组拉动摇臂进行复位的方法,通过液压绞车拖动滑轮组,带动缆绳,作用力于系固缆柱。本研究提出的新方案采用了更加简洁有效的复位方案和更少量的作业工具,剔除绞车滑轮组进行的拖拉作业,避免因复位缆剐蹭摇臂而使复位方案失效,避免了因两侧绞车操作误差而受力不均,从而大大缩短了作业时长,降低了作业耗费的资源和成本,用时消除原方案存在的隐患。同时,新方案的工具设计更加合理,避免了复位缆绳与摇臂固定筋板干涉的问题,提高了复位效果和安全性。综合来看,新方案具有操作简便、耗费资源少、成本低廉等优点,为摇臂复位问题的解决提供了更加可靠和有效的方案和工具。
3 结论
本研究以海洋石油229为例,以陆丰12-3项目为依托,对摇臂复位方法进行了优化设计,并通过实际操作验证了此方案的可行性。结果表明,本文提出的优化复位方案和工具可以有效地解决摇臂复位过程中的问题,与原方案对比具有高效率、低成本、低风险的特点,并且具有较高的安全性和可操作性[6]。此外,本研究对海洋石油勘探开发领域中的摇臂复位现存问题进行了深入探讨和分析,并提出了可靠的解决方案和创新思路。这些成果不仅为摇臂复位问题的解决提供了一种新的思路和方法,同时也为滑移下水过程中的安全稳定运行提供了一定的参考和借鉴价值。
综上所述,本研究对于海洋石油勘探开发领域中的摇臂复位问题的解决具有一定的实际应用和推广价值,为日后同类的摇臂复位作业提供了宝贵的经验和思路。
参考文献:
[1] 刘玲.导管架下水后驳船摇臂运动与自动复位研究[D].天津:天津大学,2009.
[2] 樊之夏.深水导管架安装研究[J].中国海洋平台,2003(2):29-31.
[3] 梁学先,张永国,何敏,等.MOSES软件在大型导管架海上安装分析中的应用[J].中国造船,2012,53(S2):362-371.
[4] 环境条件和环境荷载规范:SY/T 10050—2004[S].
[5] 邵亮亮,魏佳广,刘涛,等.牵引系统辅助工程驳船摇臂复位研究[J].石油工程建设,2018,44(1):27-29,35.
[6] 侯金林,于春洁,沈晓鹏.深水导管架结构设计与安装技术研究——以荔湾3-1气田中心平台导管架为例[J].中国海上油气,2013,25(6):93-97,127.
