道路平整度检测多源数据高精度同步采集
2024-03-20陈小宇陈雪磊
陈小宇,陈雪磊
(华中师范大学 物理科学与技术学院,湖北 武汉 430079)
0 引言
随着社会进步和经济发展,我国的公路交通事业得到了极大的发展[1]。截止到2021 年末全国公路总里程达528.07 万公里,比上年末增加8.26 万公里[2-3]。随着我国公路里程的逐年增长,道路检测工作也变得日益繁重。平整度是评价路面质量及路面施工验收中最重要的指标之一,占总体评价指标的15%~20%[4-5]。
早期国内主要使用3 米直尺法和精密水准仪对路面平整度进行检测,但因其检测速度慢、工作效率低以及在检测过程中存在安全性等问题,难以满足我国大规模、长里程的道路检测需求。随着科学技术的快速发展,我国的道路平整度检测车凭借其使用方便、易于维护、检测效率高等优点,在道路检测领域得到广泛使用。在平整度的检测中,多传感器数据高精度同步采集是需要解决的一个关键问题。现有道路平整度检测系统大多使用高精度数据采集卡对多传感器数据进行同步采集,此方案可以获得较好的测量精度,但成本高、体积大,不能满足我国大规模道路低成本的检测需求。
本文针对路面平整度检测中多传感器数据同步采集的需求,旨在设计一种具有低噪声、低成本、高集成度、抗干扰能力强、高采样精度的道路平整度检测多传感器数据同步采集系统,以FPGA 为控制核心,TX2 为数据处理单元,采用A/D 采样的方式完成多路传感器数据的同步采集,同时为提高系统的抗干扰能力,加速度计和激光测距机输出的模拟信号采用差分方式进行放大。
1 系统总体设计
本文采用模数转换器同步采样4 路传感器信号,利用GPS 模块产生的秒脉冲和NEMA 数据并结合板载的高稳晶振为系统建立高精度时间基准[6]。利用FPGA 的并行优势实现4 路传感器数据在时间上对齐[7]。并以英伟达公司的Jetson TX2 作为数据处理核心单元[8],对数据进行同步采集和存储。总体方案框图如图1 所示。
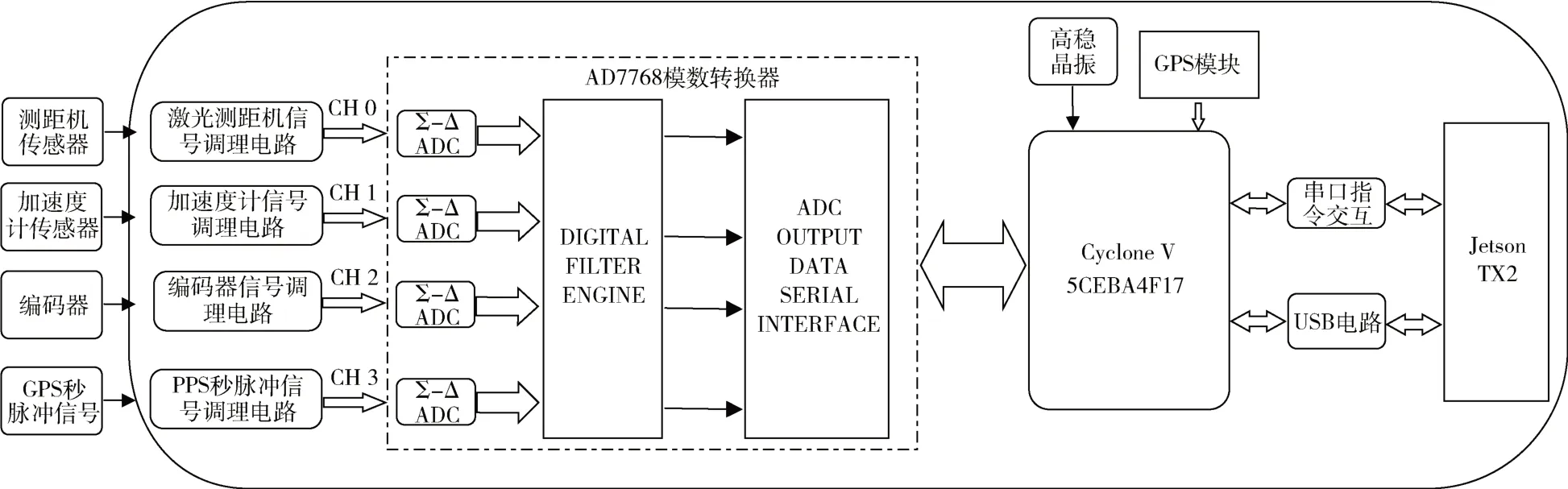
图1 系统总体框图
A/D 模数转换器的主要功能是把激光测距机、编码器、PPS 秒脉冲、加速度计传感器输出的信号进行同步采样和数字化,并通过数据串行接口传输到FPGA。
FPGA 按照程序设定的采样率同步采集4 路传感器数据并同时记录采集时刻的时间,并通过USB 电路传输到TX2(工控机)。工控机通过串口发送开始和结束指令控制采集的开始和停止。
2 系统硬件设计
2.1 主控芯片选型
选用Altera 公司生产的Cyclone V 系列FPGA 作为主控芯片,完成A/D 数据同步采集、指令控制、数据传输、协议解析、时间同步等任务。该芯片具有丰富的逻辑资源,满足系统的设计要求。
2.2 ADC 选型及外围电路
ADC 芯片采用ADI 公司的AD7768-4,此ADC 具有4 通道24 位同步采样,在110.8 kHz 最大输入带宽下实现108 dB 动态范围,具备±2 ppm INL、±50 μV 失调误差和±30 ppm 增益误差的典型性能,可以接收的差分电压范围是-4.096 V~+4.096 V。其主要功能是对加速度计、编码器、秒脉冲和激光测距机输出的信号进行同步采样,并经过保持、量化和编码把转化后的数字信号经过ADC 内部的串行数据接口传输到FPGA[9]。为使ADC能够正常采集4 个传感器输出的信号,在工作前需要对AD7768 进行配置。引脚配置模式可以确保器件在上电、复位或者电源故障时处于已知的工作状态,本文选用引脚配置模式。ADC 外围电路如图2 所示。
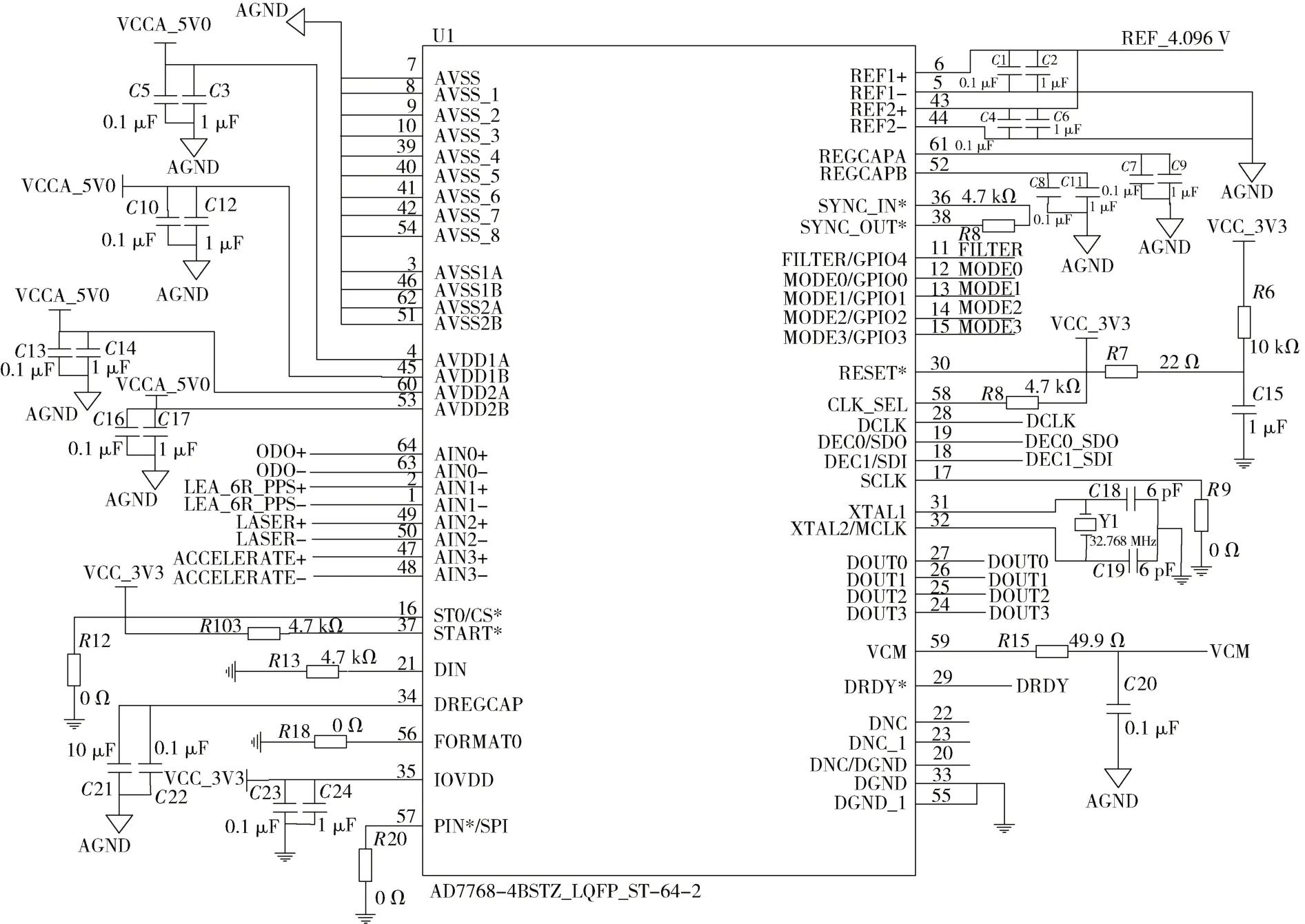
图2 ADC 外围电路
2.3 信号调理电路
信号调理电路主要功能是对激光测距机、编码器、PPS 秒脉冲、加速度计传感器输出的原始信号进行放大、滤波使其适合于模数转换器的输入量程。为了能够发挥ADC 的最大接收量程范围,本文需要对加速度计、编码器、PPS 秒脉冲、激光测距机传感器输出的原始信号设计各自的信号调理电路。
2.3.1 加速度计信号调理电路
加速度计传感器输出的单端信号幅度为0.5 V~4.5 V,差分信号幅度为±4 V。满足ADC 的量程范围,调理电路放大倍数设计为1 倍。根据奈奎斯特采样定律,当输入被测信号频率为fi时,为了完整对输入信号进行采样,采样率fs必须大于2fi。当采样率小于2fi时,为防止混叠现象的出现,信号在进入ADC 之前需要进行滤波处理,本文根据加速度计手册推荐的截止频率设计电路带宽为13 kHz。加速度计信号调理电路如图3 所示。
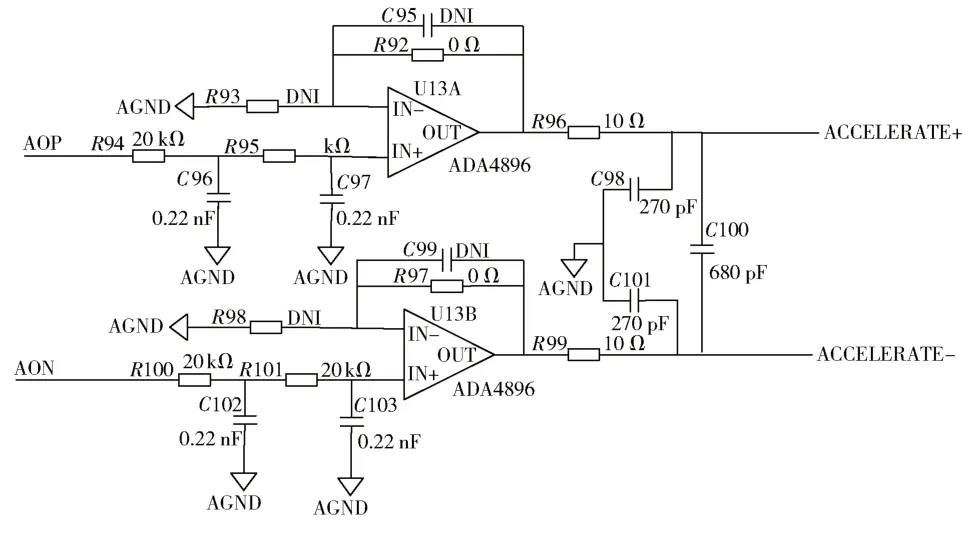
图3 加速度计信号调理电路
2.3.2 激光测距机信号调理电路
采用加拿大LMI Technologies 公司的Gocator1350激光测距机。具体参数如表1 所示,输出为4~20 mA 的电流信号,经过50 Ω 电阻转化为200 mV~1 V 电压信号。采用仪表放大器对电压信号4 倍放大后接入ADC进行采样。信号调理电路带宽设计为1.05 kHz,电路如图4 所示。
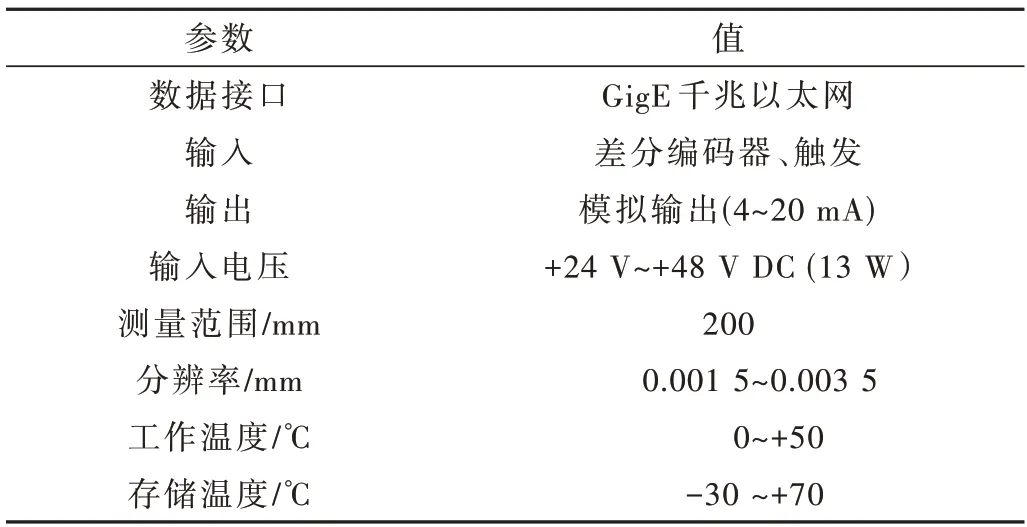
表1 激光测距机参数
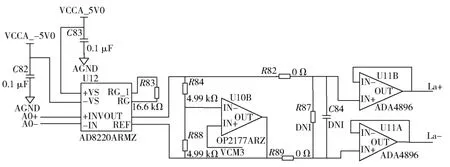
图4 激光测距机信号调理电路
2.3.3 编码器和PPS 秒脉冲信号调理电路
编码器和秒脉冲输出的信号都是幅度为3.3 V 的单端信号,经过信号调理电路转化为差分信号,然后传输到A/D输入端进行采样。信号调理电路的带宽设计为43 kHz。编码器和PPS 秒脉冲信号调理电路如图5 所示。
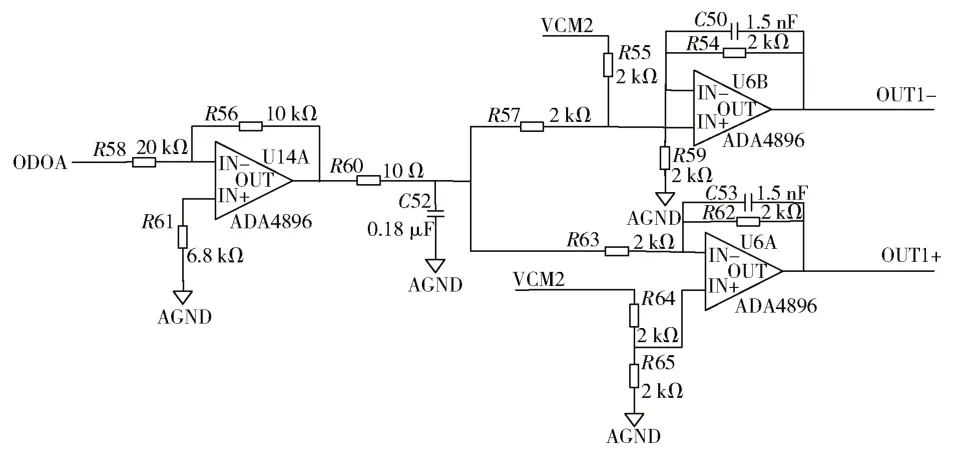
图5 编码器和PPS 秒脉冲信号调理电路
2.4 A/D 与FPGA 接口电路
A/D 与FPGA 连接关系如图6 所示。DRDY 为数据就绪引脚,当ADC 转换数据完成后此引脚会输出一个高电平。DCLK 为转换数据时钟引脚,作为数据输出的时钟。DOUT0~DOUT3 为转换数据输出引脚,用于将AD7768 转 换后的32 位 数据 输入 到FPGA。CS、SDI、SDO、SCLK 引脚为SPI 配置引脚,用于配置AD7768 工作模式,如抽取率、输出数据速率、功耗模式和内部数字滤波器类型等。
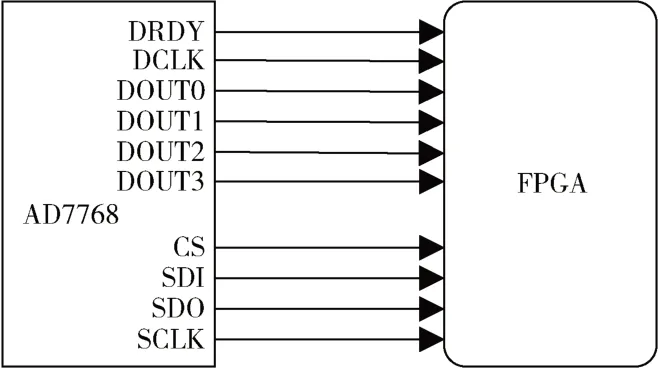
图6 A/D 与FPGA 接口电路
2.5 GPS 授时电路
GPS 授时电路功能是为系统提供精确的时间。本文选用u-blox 公司LEA-6R 型号芯片并结合板载高稳晶振为系统提供微秒级的时间精度。GPS 授时电路如图7 所示。
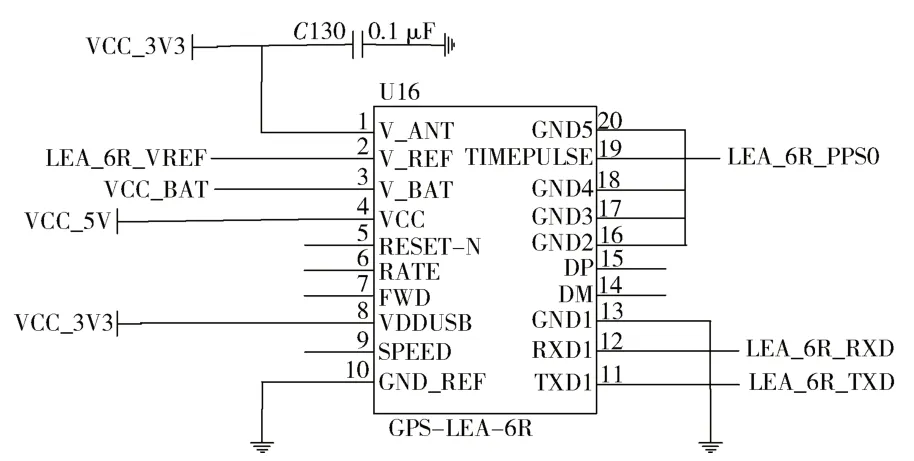
图7 GPS 授时电路
2.6 USB 传输电路
数据通过USB 从FPGA 传输到工控机。选用Cypress 公司CY7C68013 USB 控制器,该芯片内部集成USB2.0 协议,支持12 Mb/s 全速传输和480 Mb/s 高速传输,具有控制传输、中断传输、块传输和同步传输4 种传输方式[10],芯片内部还集成8051 内核的微控制器以及可编程的外设接口。USB 传输电路如图8 所示。

图8 USB 传输电路
3 系统软件设计
3.1 FPGA 程序设计
多传感器数据高精度同步采集FPGA 程序流程如图9 所示,系统上电后首先进行初始化操作和高精度时间基准建立,等待接收来自工控机的开始采集指令。解析指令并按照程序设定的采样率对数据采样,同时记录下采集时刻的时间。本系统要求的采样率是4 kHz。FPGA 程序包括串口通信模块、PC 指令解析模块、GPS解码模块、高精度时间基准模块、A/D 同步采集与数据融合模块、USB 传输模块等。
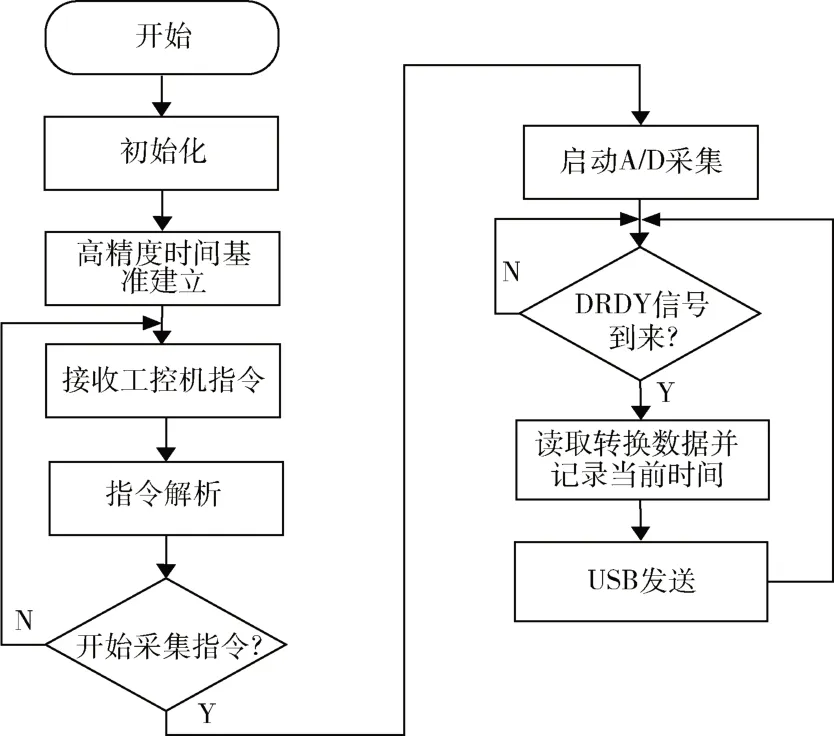
图9 FPGA 程序流程图
3.2 工控机程序设计
Linux 操作系统因其易于维护、可移植性强、代码开源、定制方便等优势在众多领域得到广泛应用[11]。本文以Ubuntu 系统为平台,在工控机上搭建Qt 开发环境,接收FPGA 传输过来的数据。工控机接收程序框图如图10 所示,Qt 工控机接收程序主要分为采集线程和存储线程。采集线程主要负责采集USB 上传的数据,并将接收的数据写入队列中。存储线程主要负责将队列中的数据读取出来并写入到文件中。工控机通过串口发送开始指令,间隔一定的时间对USB 进行查询,当检测到USB 有数据时,按照时序完成数据的读取。为了保证采集线程和存储线程能够正确、合理地使用公共资源,本文通过定义信号量来负责协调两个线程。
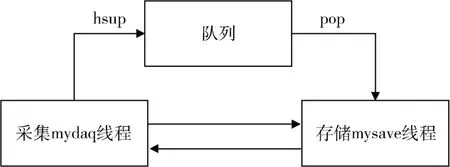
图10 工控机接收程序框图
4 实验结果与分析
4.1 电路仿真结果
由于篇幅有限,本文选取激光测距机信号调理电路进行仿真验证。激光测距机信号调理电路仿真结果如图11~图13 所示,激光测距机输出的电流信号经过电阻转为200 mV~1 V 电压信号,仪表放大器对电压信号进行4 倍放大。图11 为激光测距机信号调理电路仿真的幅频特性曲线图,从图中可以看出电路的带宽约为1.053 kHz,符合电路设计的带宽要求。图12 为激光测距机放大倍数仿真图,图中黑色信号为输入的峰峰值为1 V 正弦波信号,灰色信号为输出的峰峰值为4 V 正弦波信号,可见放大倍数为4 倍,满足设计要求。图13 为激光测距机信号调理电路的相频特性曲线图,信号的频率小于1.053 kHz 时相位不发生改变。
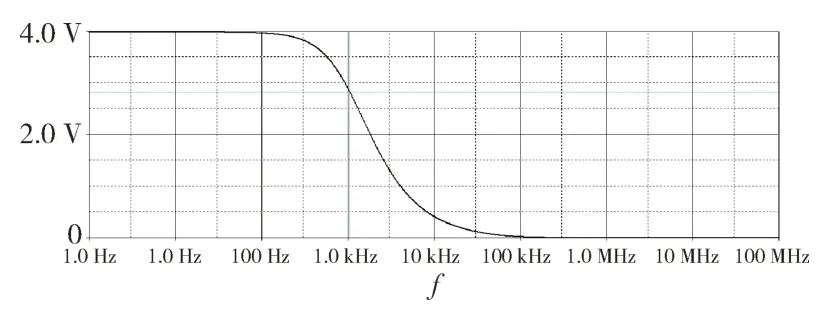
图11 激光测距机幅频特性曲线
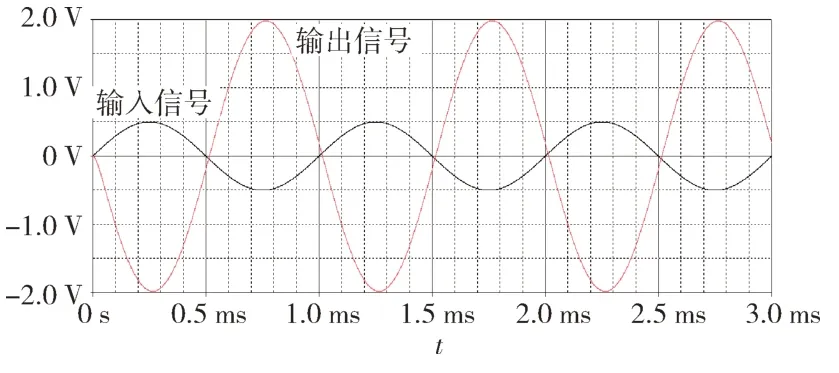
图12 激光测距机放大倍数仿真图
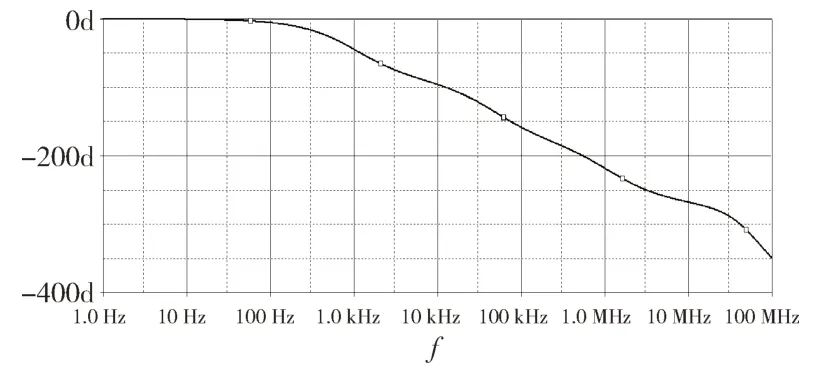
图13 激光测距机相频特性曲线
4.2 抗干扰仿真测试分析
为提高系统的干扰能力,A/D 同步采集板的模拟前端信号调理电路采用差分放大电路,为验证其抗干扰能力,使用PSpice 电路仿真软件进行测试。
在信号调理电路的两个输入端接入一个大小相等、极性相同的共模电压信号(干扰信号)和一个大小相等、极性相反的差模电压信号(被测信号),即:
接入共模信号的频率为1 kHz,幅值为0.5 V,差分信号的频率为1 kHz,幅值为1 V,在输出端测得其差分电压信号的幅值如图14 所示,由图可知,差分信号能够被正常进行放大,共模信号被抑制。
综上可知,使用差分方式进行信号放大能够对外部干扰噪声起到很强的抑制能力,满足系统设计要求。
4.3 室内环境采集结果
表2 为在室内环境下测试的部分数据,主要包括时间信息、激光测距机传感器、加速度计传感器、编码器和秒脉冲数据。其中时间信息的后三位代表微秒信息。本系统设置的采样率为4 kHz,相邻两个数据之间的时间差为250 μs,静态环境下功能测试正常,符合系统设计要求。
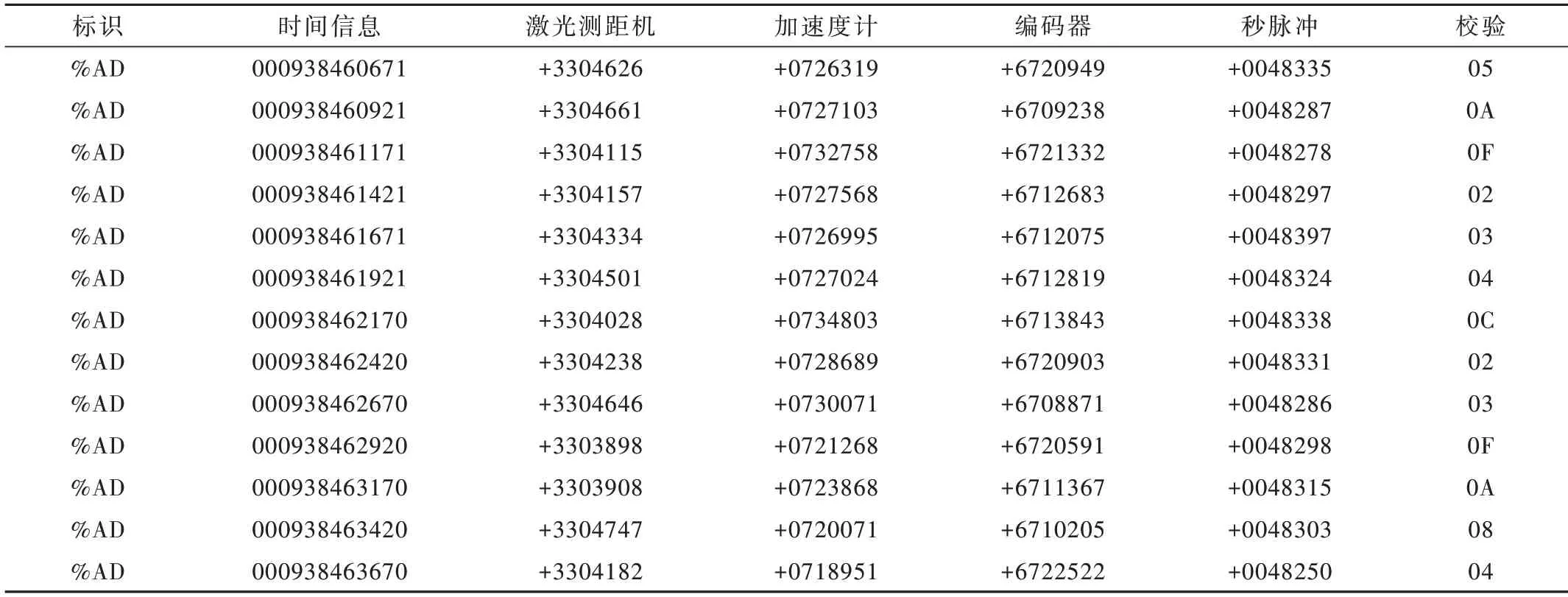
表2 室内实验室采集数据
4.4 平整度重复性测试验证
平整度重复性试验是指在相同的试验条件下对同一路段进行多次测量,比较多次测量的误差是否在指标允许的范围内,使用变异系数来评价道路平整度检测系统检测数据的稳定性和一致性,变异系数CV的计算公式如下:
选取武汉市东湖新技术开发区凤凰山街500 m 长的路段,将安装有道路平整度检测装置的检测车以70 km/h的速度对路面进行10 次测量,并对每次测量的数据计算国际平整度指数IRI,平整度指数计算的区间为100 m,如表3 所示,道路平整度测试路段如图15 所示。
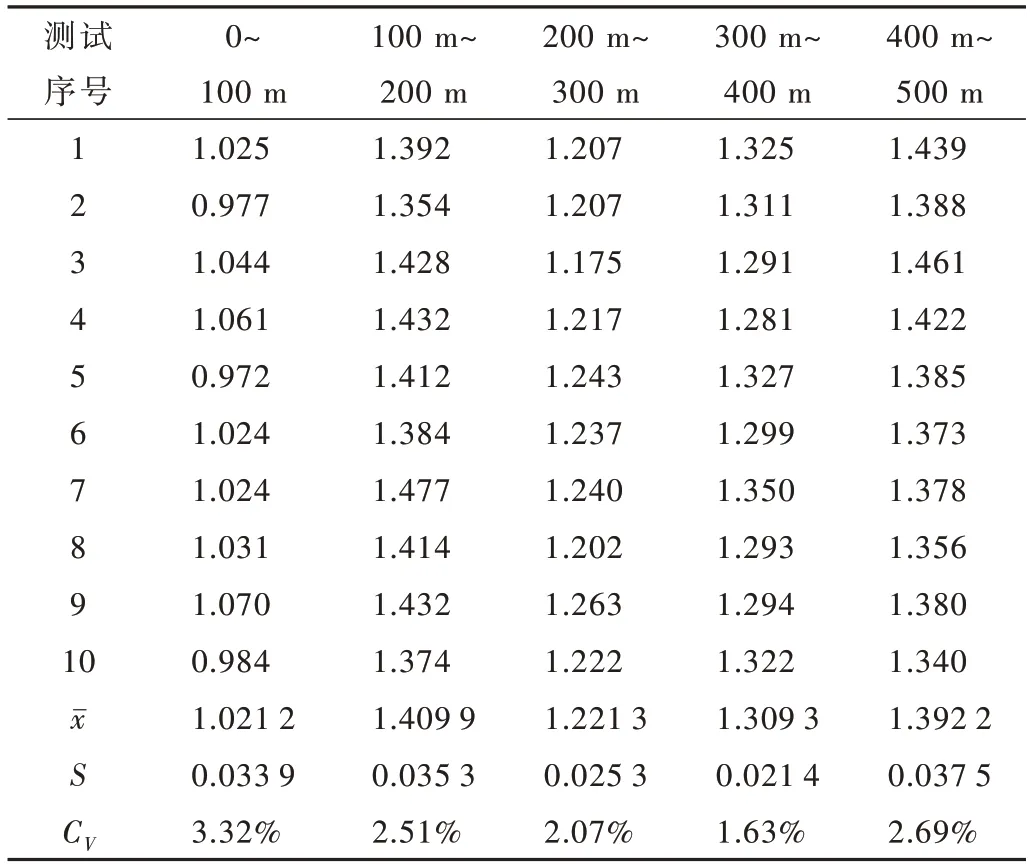
表3 同车道10 次IRI 测量值 (m/km)

图15 凤凰山街测试路段
其中,xi表示第i次测量的值,xˉ表示n次测量的平均值,n表示测量次数,S表示n次测量的标准差,按照交通行业的检测规定,变异系数要求小于5%。
由表3 可知,对凤凰山街500 m 长的路段进行重复性测试,其变异系数都小于5%,满足交通行业的检测规定。证明本文设计的道路平整度检测系统的稳定性和检测结果的一致性满足要求。
4.5 平整度对比测试验证
使用本文设计的道路平整度检测系统与武汉夕睿光电技术有限公司现有的平整度检测系统进行对比测试,以验证本文设计的道路平整度检测系统的稳定性和抗干扰性。标准差(S)是用来描述数据值偏离算术平均值的程度,其数值越小,代表数据越集中,反之数据就越离散。本文使用标准差来衡量两个平整度测量系统的稳定性。
选取武汉市江夏区锦绣大道500 m 长路段,分别使用本文设计的道路平整度检测系统和武汉夕睿光电技术有限公司现有的道路平整度检测系统对路面进行5 次测量并对测量的数据计算国际平整度指数IRI,如表4 和表5 所示,道路平整度测试路段如图16 所示。
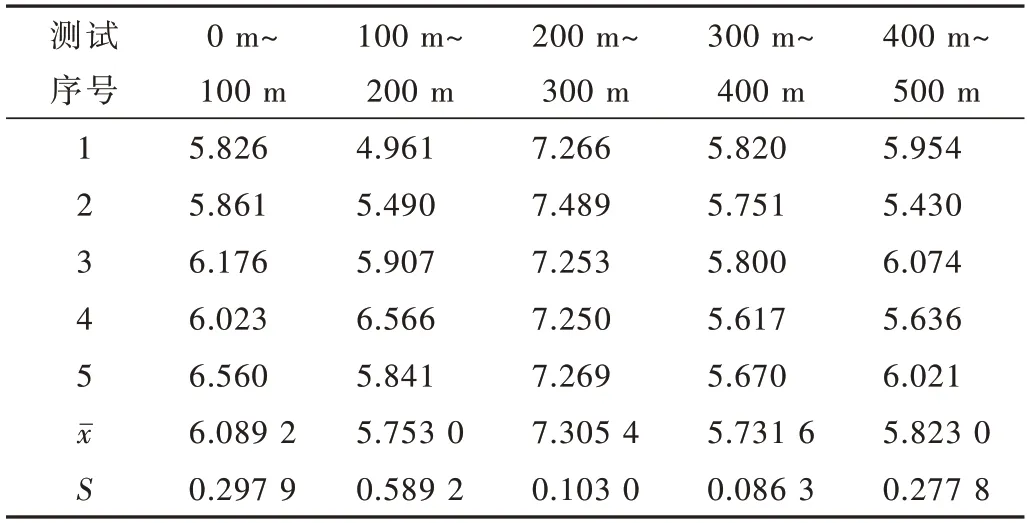
表4 现有平整度检测系统 (m/km)
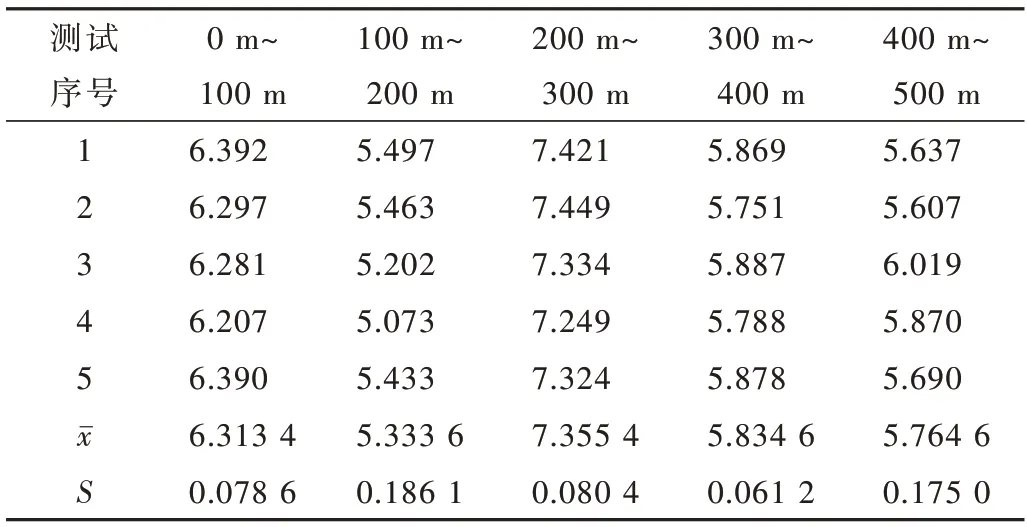
表5 本文设计平整度检测系统 (m/km)

图16 锦绣大道测试路段
选取锦绣大道500 m 长的路段使用本文设计的道路平整度检测系统和现有的道路平整度检测系统进行对比测试,由表4 和表5 可知,本文设计的平整度检测系统标准差更小,系统工作更稳定,抗干扰能力也更强。
5 结论
本文以FPGA 作为主控芯片,TX2 为处理单元,设计了一种基于A/D 采样的多传感器数据高精度同步采集系统,实现了加速度计、秒脉冲、编码器和激光测距机数据的同步。完成了信号调理电路的设计和FPGA 同步程序的编写,并进行仿真和实际测试。实验结果表明,该系统的时间同步精度可达微秒级,能够有效地对路面平整度做出评价,可为有关部门对农村道路路面及时维护提供可靠的数据依据。该系统还具有数据采样精度高、稳定性好、成本低、抗干扰能力强等优点。
