基于多光谱无人机及机器学习的林木火灾受损信息提取研究
2024-03-14崔中耀赵凤君叶江霞
崔中耀,赵凤君,赵 爽,费 腾,叶江霞
(1. 西南林业大学 林学院,云南 昆明 650224; 2. 中国林业科学研究院森林生态环境与自然保护研究所 国家林草局森林保护学重点实验室,北京 100091)
0 引言
森林扰动在维持生物群落多样性及其稳定性等方面意义重大,是森林生态系统演替的关键过程[1-2]。林火干扰作为森林扰动的重要方式之一,可影响碳分布格局及群落演替[3]。在森林灾害研究中对林火干扰程度,即林木受损程度信息精确获取对于火灾评估及生态修复等具有重要作用,也是现代林火管理的重要内容。传统的火灾林木受损信息获取是以野外样地勘察为基础,如林业行业标准LY/T 1846—2009《森林火灾成因和森林资源损失调查方法》[4]中关于林木损失调查方案,不仅成本高、工作量大,且难以精确获取空间信息。随着多源卫星遥感影像的应用,为大区域森林火灾研究提供了重要基础。国内外学者在森林火灾信息提取中开展了大量研究,如CHAFER等[5]获取森林火灾前后SPOT2遥感数据计算归一化植被指数(normalized difference vegetation index, NDVI),将过火区域划分为未烧、低、中、高、非常高和极度严重6种梯度。李明泽等[6]在TM影像上结合DEM影像和林相图数据,利用差值归一化火烧指数(differenced normalized burn ratio, dNBR)等指数,建立决策树模型将大兴安岭呼中林区过火区域划分为未过火、低度燃烧、中度燃烧和高度燃烧4个等级。虽然卫星影像在林火植被受损空间格局信息获取中起到了重要作用,但由于空间分辨率不足及实时性限制,难以识别中小尺度火场林木受损信息。
近年来,低空遥感技术为中小区域森林火灾调查评估提供了新手段,无人机遥感因地面清晰度高、现势性好和机动灵活等优点,被逐渐应用于林火研究领域中[7]。MCKENNA等[8]通过无人机获取火灾前后遥感影像,结合差值植被指数把植被分为未烧区、轻度火烧区和重度火烧区。SHIN等[9]利用红边多光谱无人机影像,采用最大似然、光谱角映射器和归一化差异植被指数阈值法,将林木分类为烧毁树冠、烧伤树冠、烧焦表面和未烧树冠4个级别。YE等[10]综合运用轻小型无人机影像中光谱、几何和纹理等特征,以面向对象方法实现未烧伤、烧伤、烧死和烧毁林木自动提取。但该方法采用的轻小型无人机影像仅含RGB波段,需要大量试验判断最佳分割参数,并建立复杂信息提取规则,进而影响了该方法的实用性。随着多光谱无人机的出现,如DJI PM4,增加了对植被健康状态敏感的红边及近红外波段,被逐渐应用于林业及火灾精细化信息提取研究中[11]。因此,利用多光谱无人机影像数据,特别是红边及近红外波段,通过提取多光谱波段影像特征,探究其用于精确提取林木火灾受损信息是值得进一步研究的。
分类方法是影响遥感信息提取精度的方法,常见的传统方法有最大似然、最小距离和马氏距离等[12-14],机器学习算法是从已知中获得规律,利用规律对未知进行预测,主要包括支持向量机、随机森林和k-最近邻等[15-17],已广泛应用到遥感信息提取研究中。其中随机森林(random forest, RF)和支持向量机(support vector machine, SVM)在火烧迹地识别精度和可操作性上具有较好的优势,如熊源等[18]利用可见光UAV与Sentinel-2A融合影像采用RF算法精准识别森林火灾过火区域,且火烧界限明显。金晟玥等[19]应用环境减灾二号A/B卫星影像数据,基于SVM分类方法提取火烧面积,识别精度达96.9%。目前,针对现有火烧迹地林木受损程度提取的研究较少,本文以多光谱无人机遥感影像为数据源,综合火灾受损林木光谱特征、纹理特征差异,借助RF及SVM机器学习算法,探究森林火灾过火区域内不同受损程度的林木信息的精确提取方法,以促进多光谱无人机影像数据在中小尺度森林火灾灾后林木资源损失评估的应用,为区域植被恢复规划及森林火灾管理等提供基础数据。
1 研究区概况与数据
1.1 研究区概况
以云南省安宁市青龙街道双湄村森林火灾为研究对象,安宁市介于24°31′N~25°06′N,102°10′E~102°37′E之间,属北亚热带季风气候,常年平均气温16.3 ℃,年均降水量912.2 mm。地形险峻,高山低谷交错,具有丰富的磷矿资源,属于滇中主要城市群,经济发展水平较高,人为活动频度大。森林类型为针阔混交林,主要优势树种为云南松(Pinusyunnanensis),并伴有华山松(Pinusarmandi)等其它乔木。由于特殊的自然地理环境及社会经济条件,使得该区域成为全国火灾的高发与严重地区,历年火灾频发,1986年“3·28安宁火灾”及2006年“3·29森林火灾”重大火案发生于此,该区域森林火灾研究备受关注。
1.2 数据获取与处理
无人机影像数据采用大疆精灵4多光谱无人机获取,该平台有1个RGB传感器和2个近红外波段传感器,包含了监测植被健康状态尤为重要的红边及近红外波段,能满足林木火灾受损信息提取研究要求[20]。数据于2020年11月12日拍摄,航拍高度为280 m,旁向重叠以及航向重叠65%和80%,航点悬停拍照模式,共获取600张单幅相片。使用大疆智图(Terra)软件对图像拼接、辐射定标,生成研究区正射影像图(digital orthophoto map, DOM),分辨率约为0.1 m,总面积为22.71 hm2,位于火灾区域边缘,属于树冠火伴随地表火,包含林业标准[4]中描述的由不同烧伤程度林木构成的林分,即烧毁、烧死、烧伤及未伤森林,如图1所示。
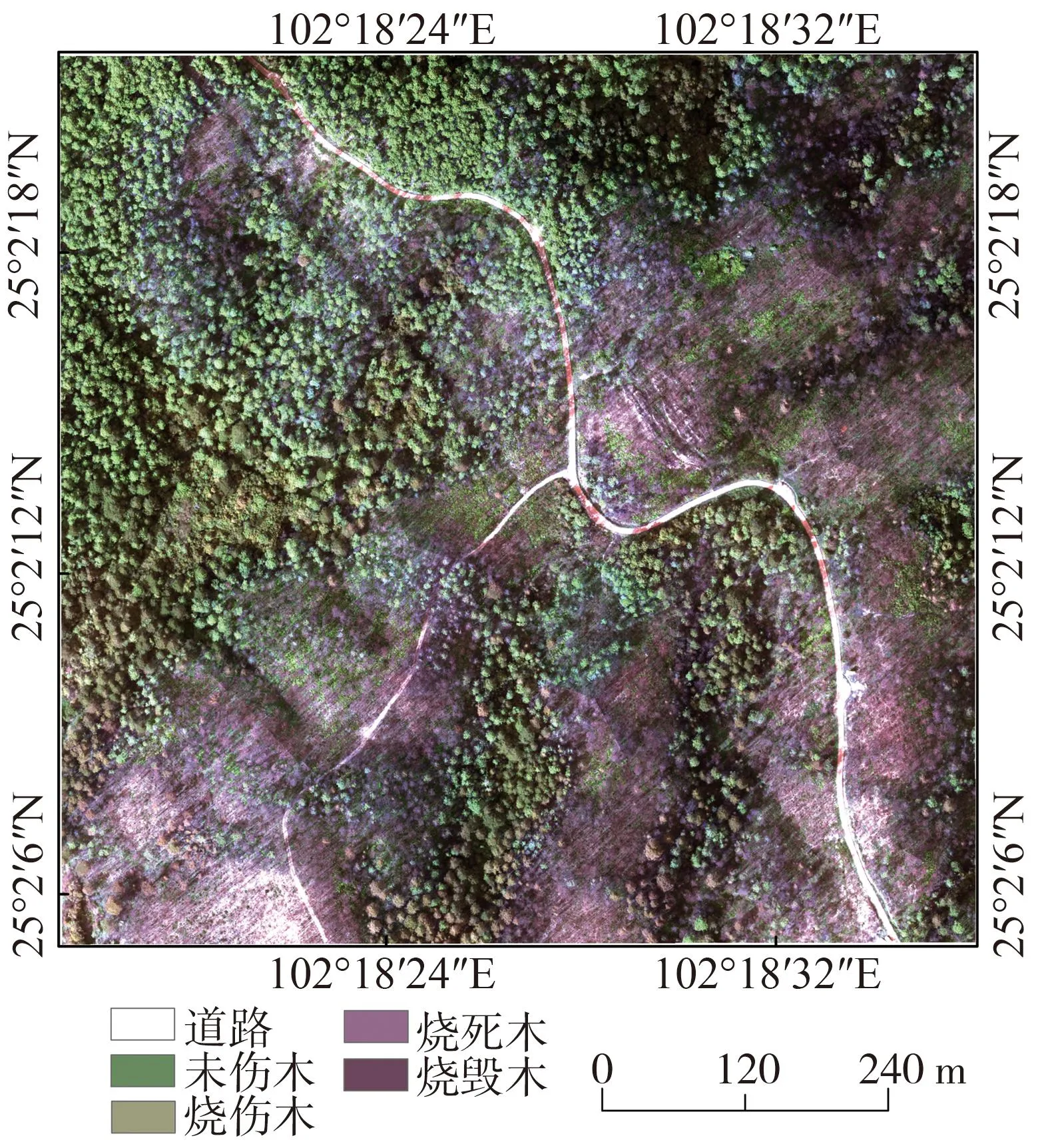
图1 研究区正射影像Fig.1 Digital orthophoto image of the study area
1.3 林木受损程度分类样本获取
在获取研究区无人机影像的同时进行现场调查,结合DB23/T 1376—2010《森林火灾林木受害程度判定》[21]确定烧毁木、烧死木、烧伤木和未伤木典型样本,并叠加无人机影像,建立不同受损程度林木影像目视解译标志和分类体系。通过分析,将研究区地物主要分为烧毁木、烧死木、烧伤木、未伤木和道路5个类别,并以目视解译增加典型地物选取样本,以不同代表性像素类别所处位置表示地物类型。根据相关文献确定样本像元数在0.5%~1.0%间可实现地类的精确识别[22-24],故选取未伤木样本53176个像元,烧伤木样本38493个像元,烧死木样本40729个像元,烧毁木样本43921个像元,道路样本50795个像元,样本数量占影像的1.0%,其中70%用于影像分类,30%用于精度验证。
2 研究方法
遥感影像信息提取的关键是特征参数选取及分类方法。研究结合影像多光谱信息、纹理特征,以分离指数剔除分离性差的植被指数,并利用相关性分析剔除高度相关的纹理特征,再分别采用支持向量机(SVM)和随机森林(RF)对森林火灾灾后林木受损程度进行分类识别,技术路线如图2所示。

图2 技术路线Fig.2 Technical flowchart
2.1 受损林木光谱特征提取
多光谱无人机影像数据具有监测叶绿素含量的红边及近红外波段,可有效地识别林木受损信息。以此为基础构建植被指数,增强植被结构特性及空间变化,加强地物可区分性[25]。采用4种与森林火灾高度相关的植被指数识别林木受损信息,即归一化差值植被指数NDVI[26],归一化差值红边植被指数(red edge normalized difference vegetation index, NDVIrededge)[27],改进红边比值植被指数(modified red edge simple ratio index, mSRrededge)[28]和植被衰减指数(plant senesence reflectance index,PSRI)[29],计算公式如表1所示。

表1 植被指数表Table 1 Table of vegetation index
分离指数可衡量各植被指数区分地物与其他地物的能力,常在植被指数分离性评估中体现[30-31],即
(1)
式中:M为分离指数;μb和σb分别为地物样本像元的均值和标准差;μμb和σμb分别为其他地物样本像元的均值和标准差。M值越大,植被指数区分地物与其他地物的能力越强;M≥1说明区分度较好,M<1说明区分度较差[32]。
2.2 受损林木纹理特征提取
纹理特征反映各地物表面排列随机性和空间分布信息,结合植被指数特征提取林木受损信息具有较好效果。灰度共生矩阵(grey level co-occurrence matrix,GLCM)是采用灰度空间相关性纹理的方法,窗口大小、步长和方向对纹理特征提取至关重要[33-34]。对比3×3至25×25窗口提取的纹理特征,确定最佳窗口,在此基础上,设置步长为1、2、3,方向为0°、45°、90°和135°。经试验,确定窗口大小为19×19、步长为3,方向为45°,提取统计量效果最优的8种纹理特征并求出均值,使用SPSS软件对相关性高的(>0.9)纹理特征剔除[35]。
2.3 分类方法
支持向量机由VAPNIK[36]提出,以统计学为基础构建的机器学习算法。鉴于实际数据是非线性分布,需定义合适的核函数将样本空间转变为高维度空间,基于支持向量建立最优决策平面,降维后提供一条明晰的非线性决策界限,如图3所示。研究采用径向基核函数,可以确保各样本间隔最大化,只需少量样本就能取得较好的分类效果。函数表达式为
(2)
式中:xi和xj分别为非线性映射后样本;σ为常数。
随机森林是若干个决策树组成的一种机器学习算法,是BREIMAN[37]基于Bagging理论在2001年提出的。样本数据输入每株决策树,大量决策树采用投票形式得出最终结果,如图4所示。相比上述方法,该方法分类结果精度更高且更易阐明。在实际数据建模中有很好的性能支持,对噪声和异常值有较好的包容性[38]。
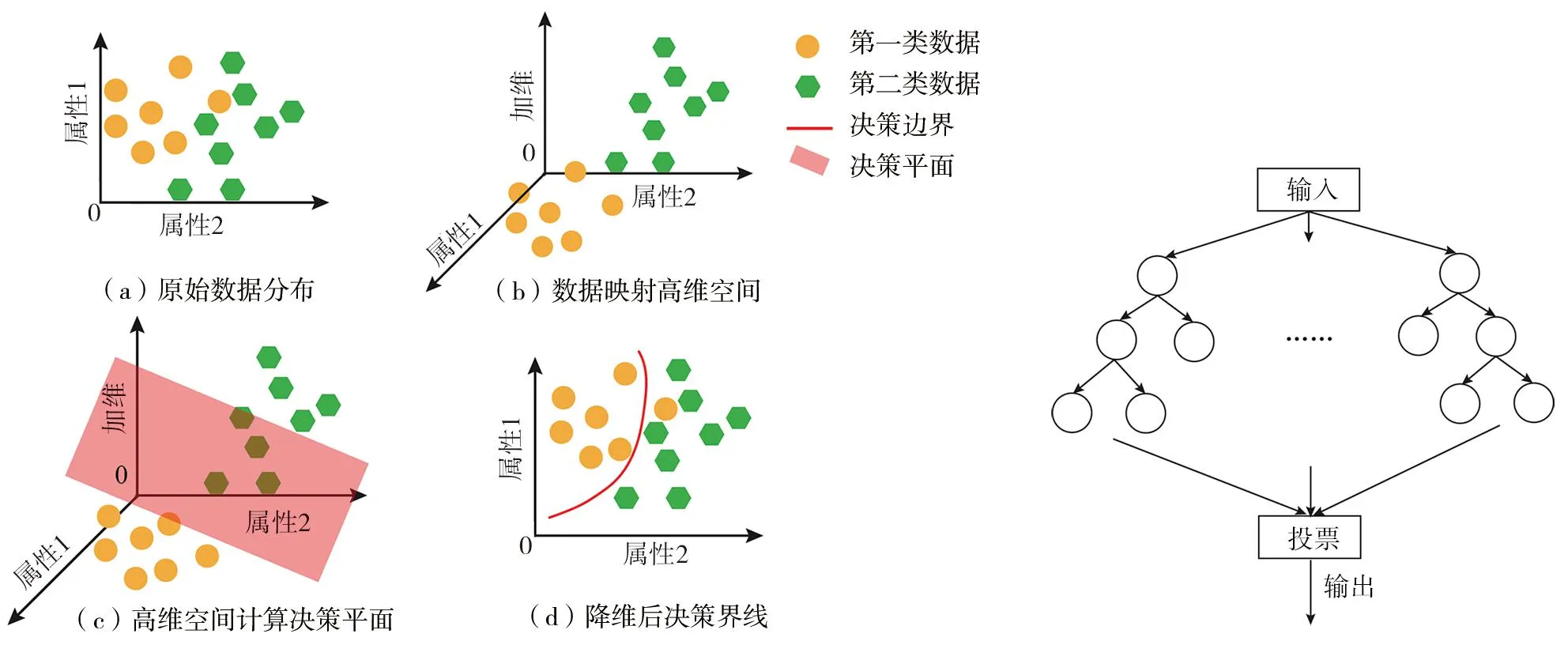
图3 基于核函数的非线性SVM分类器示意图
2.4 精度验证
为评估多光谱无人机在灾后林木受损信息提取研究中的可行性,利用目视解译方法结合样地实地调查,生成林木受损类别分布图并建立混淆矩阵。研究选择总体精度(overall accuracy, OA)和Kappa系数反映整体分类效果;生产者精度(production accuracy, PA)表示参考数据和分类图中相同地物处于同一类别的几率;用户精度(user accuracy, UA)指某一类别的正确分类数与此类别总数之比,F统计值用来评价单个地类的分类精度[39-40]。计算公式如下:
(3)
(4)
(5)
(6)
(7)
式中:N为像元总数;xii为类别在矩阵主对角线上的值;k为类别总数;xi+和x+i分别为矩阵不同行列的和;PAi指类别i的生产者精度;UAi指类别i的用户精度。
3 结果与分析
3.1 受损林木光谱特征

图5 不同地类光谱曲线 Fig.5 Different types of spectral curves
统计林木受损类型样本在多光谱无人机影像各波段的均值并绘制光谱曲线,如图5所示。由图可知,道路在可见光波段反射率较高,烧毁木、烧死木、烧伤木和未伤木在RGB波段的吸收能力较强。因此,在可见光范围内道路与其他地类区分度较大,不易混淆;未伤木与烧伤木相比于烧死木和烧毁木对可见光的反射率较高,且反射率值接近,从红波段到近红外范围内(690~740 nm)反射率迅速升高,红边效应明显;烧死木和烧毁木在近红外区域区分较为明显。表明各地类在红边和近红外范围内具有较好的区分度,以此为基础,建立植被指数和纹理特征可增强植被健康状态的识别和有效削弱影像中异物同谱现象的干扰。
分析用于植被健康监测的4种植被指数特征,如表2所示。由表可知,PSRI值增大标识树木冠层胁迫增加,未伤木PSRI值最小仅为0.004,随着林木受损程度加剧,PSRI值逐渐增加,烧毁木的值为0.287,其中道路PSRI值最大为0.381;对于mSRrededge未伤木最大,为0.964,烧毁木的值最小仅为0.345,与道路的mSRrededge值(0.353)较为接近,区分度不大,易混淆。NDVIrededge对叶冠层的微小变化、林窗片断敏感,未伤木的NDVIrededge值为0.14,烧毁木仅为0.002。而NDVI指标,其值随着灾后林木受损严重程度的加大,呈现逐渐减小的趋势。未伤木的NDVI值为0.716,烧毁木的NDVI值为0.125。而正常植被的NDVI、NDVIrededge、mSRrededge值均较高而PSRI值较低,易与道路、烧毁木区分。
统计影像各地物样本间植被指数的平均值和方差,计算分离指数M,如图6所示。由图可知,依据植被指数分离能力而言,火灾后的NDVI对道路-烧毁木和烧伤木-烧死木的分离性较差,分离指数均小于1,容易造成混分;mSRrededge对道路-烧毁木和烧伤木-未伤木的分离性较差,分离指数同样小于1,容易出现误判现象;NDVI和mSRrededge只有2种对应地物的M<1明显优于NDVIrededge和PSRI,PSRI的M≥1的最少,区分各地物的能力最弱;而NDVIrededge对各地物的区分能力仅好于PSRI。根据各地物的M可知,道路-烧伤木、道路-烧死木、道路-未伤木、烧毁木-未伤木和烧死木-未伤木的分离指数均大于1,利用任何一种植被指数都能明显区分。因此,最终保留NDVI、mSRrededge和NDVIrededge这3种植被指数进行模型建立。

图6 典型地物分离指数Fig.6 Typical feature separation index M
3.2 受损林木纹理特征
采用SPSS软件对各类地物纹理特征进行相关性分析,如表3所示。由表可知,同质性分别与标准差、对比度、非相似性、熵和角二阶矩5种纹理特征的相关性高于0.9,因此,将同质性剔除;在其余的纹理特征中非相似性分别与标准差、对比度和熵3种纹理特征高度相关(>0.9),同理将非相似性剔除;熵和标准差分别与角二阶矩和对比度相关度高,根据其余纹理特征之间的相关系数判定,最终选取均值、对比度、二阶矩和相关性4项之间不具备高度相关的纹理特征进行模型构建。
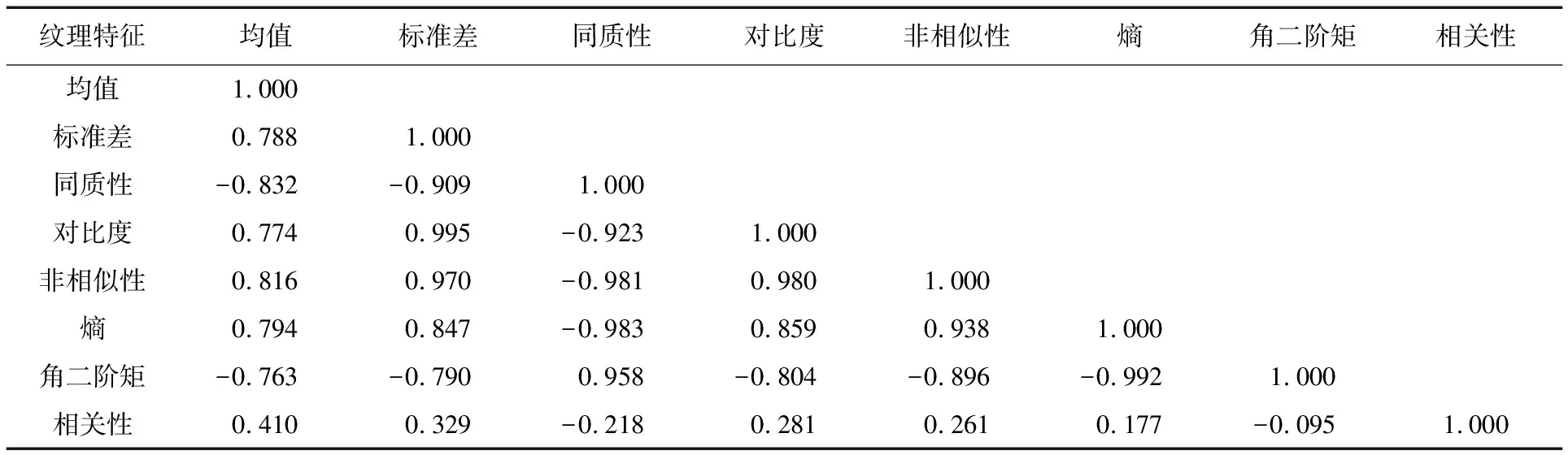
表3 纹理特征相关性分析Table 3 Texture feature correlation analysis
3.3 林木火灾受损信息提取
研究共选择多光谱影像的5个单波段、3种植被指数和20个纹理特征(5个波段的均值、对比度、二阶矩和相关性),共28个影像特征,构建RF和SVM模型分析林木受损空间分布格局,如图7所示。均可清晰地看出火灾后林木不同程度的受损分布,未伤木斑块较完整,水泥路提取较为清晰。其中,烧毁木区域(右下红圈)分类结果图对比可知,2种分类方法均存在局部烧毁木错分成道路的情况,但RF结果图中烧毁木提取效果明显优于SVM;由未伤木区域(左上红圈)分类结果图对比可知,SVM分类器将树冠间含有的小面积阴影部分误判为烧伤木,RF分类器能够把相同位置阴影部分所属类别正确探测出来。
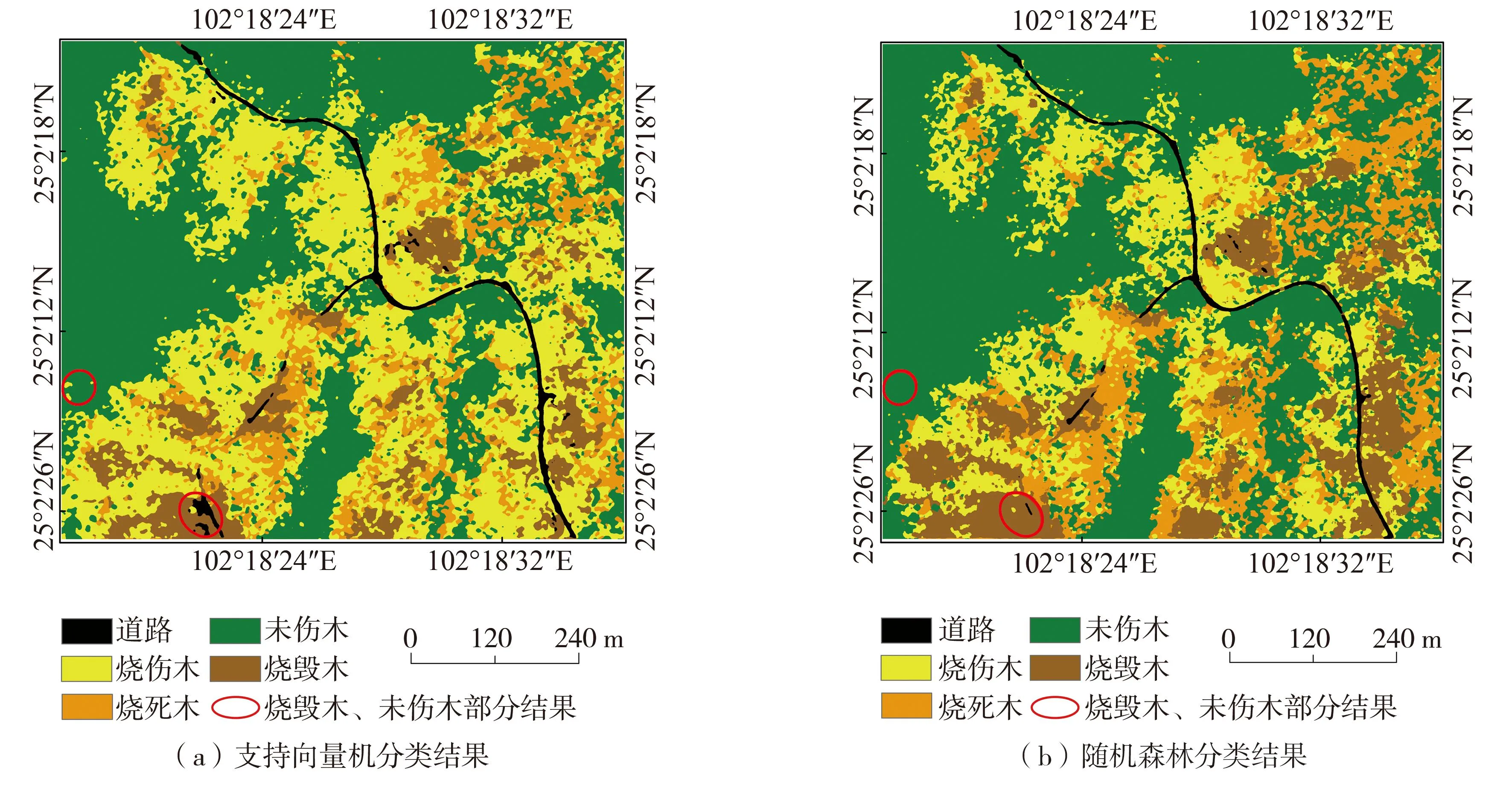
图7 分类结果图Fig.7 Classification results
使用OA、Kappa系数、PA、UA和F值定量评价2种分类方法,如表4所示。由表中整体分类效果可知,RF分类器总精度高于SVM,对林木受损程度识别总精度为89.76%,Kappa系数为0.85,相比于SVM,总体精度提升4.41%,Kappa系数提高6.25%。在单个林木受害程度类型分类精度上,SVM分类结果中道路和未伤木错分、漏分情况均低于15%,其中道路分类精度为89.93%,未伤木分类精度高达98.40%。相比于其它林木受害类型,烧死木漏分情况和烧毁木错分情况较为严重,分别为38.17%和31.09%。同等条件下,RF对各受损程度类型的漏分、错分和分类精度均有所改善,烧死木漏分率和烧毁木错分率分别降低了19.54%和5.47%,未伤木分类精度提高了0.92%,烧伤木漏分情况显著降低了59.27%。总体来说,本研究对于林木受损信息提取,采用RF模型的分类精度明显优于SVM模型,但对于面积小且分散的树林阴影和道路阴影,存在提取效果相对较差的情况。
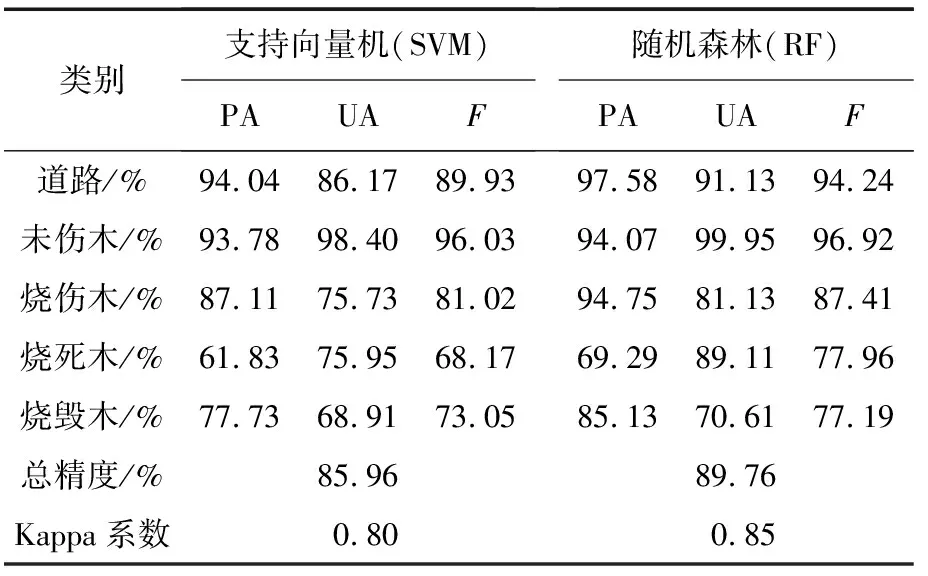
表4 分类结果精度比较Table 4 Accuracy comparison of classification results
4 讨论与结论
4.1 讨论
本研究采用光谱信息较为丰富的多光谱无人机影像数据,其含有RGB三波段及对植被健康状况敏感的红边波段和近红外波段。同时,采用机器学习算法中的SVM和RF综合植被指数、纹理特征和光谱特征等,实现了灾后林木受损程度划分。研究表明该方法对提高森林火灾调查精度和效率具有一定的可行性。通过分析研究方法和结果,发现影响火灾灾后林木受损信息提取的成因有以下几个方面:
1)遥感影像数据的获取。卫星遥感影像在森林火灾研究中能够实时监测大范围火灾情况及大尺度火场信息提取,由于卫星影像的时效性,难以及时获取火灾后火烧迹地影像而影响林木受损信息的客观提取[41]。可见光无人机相对卫星遥感具有操作简便、空间分辨率高和成本低等优势,便于实时勘察中小尺度火场,同时能有效识别不同受损程度林木在过火区域的分布格局[42]。而多光谱无人机影像较可见光无人机,增加了对植被健康状况敏感的红边和近红外波段,可提高不同受损程度林木的识别精度。
2)遥感影像特征选取。不同受损程度的林木在红边波段和近红外波段范围内反射率差异较大。研究结果与刘倩等[43]基于高分六号卫星影像数据的近红外和红边波段对过火区域区分度较高的结论基本一致。文中采用红边及近红外波段构建植被指数对火灾后林木受损信息提取与黄建文等[44]提取植被指数的思路较吻合。研究在利用植被指数认别火烧迹地的基础上[45],增加了不同受损林木纹理特征,有效抑制了“同谱异物,同物异谱”现象的影响[46],有助于不同受损程度林木的识别。
3)不同受损程度的林木提取效果。研究利用含有红边及近红外多光谱无人机影像数据,选用非参数机器学习方法,RF和SVM分类器,模型参数较为复杂,但比传统分类的精度高[47]。MCKENNA等[8]和SHIN等[9]识别不同烧伤程度林木的方法操作简单、容易实现,但要勾画典型训练样本且分类精度存在局限性[48],文中研究方法与其相比在分类精度上有所提高。
虽然利用多光谱无人机可较精确提取不同林木火灾受损程度信息,但更高精度与实践可行的信息提取方法值得深入研究。一方面,深度学习方法的运用,如卷积神经网络、全连接神经网络和循环神经网络等[49],是否能提高林木火灾受损信息提取精度值得探索。另一方面,研究区道路是由水泥路和土路共同组成,土路因周边烧毁林木灰烬覆盖和浸染而呈焦黑色,从而在目视解译样本中可能存在误判,将成林烧毁木误判为道路,从而影响识别精度。
此外,研究提出的方法适用于中小区域尺度的树冠火及地表火造成的林木树干、树冠的受损信息提取,对国家林业行业标准中林木受损信息评估的替代具有一定的可行性。但针对大面积森林火灾的林木受损程度调查而言,可综合多光谱无人机数据与卫星影像数据,采用多光谱无人机获取高地面分辨率影像数据作为点尺度上的调查,多光谱卫星影像获取大尺度火场信息,以点、面结合方式实现大面积森林火灾林木受损信息提取。
4.2 结论
本文基于多光谱无人机影像数据,以火灾后受损状况不同的林木为研究对象,结合单波段光谱信息、植被指数和纹理特征,使用SVM和RF进行对比研究,主要结论如下:
1)通过分析受损林木光谱特征得出,在红边及近红外波段区域内各地类的反射率差异较大,在此基础上构建的植被指数区分能力不同,NDVI和mSRrededge为研究区分离不同受损程度林木的最好植被指数,NDVIrededge的分离性次之,而PSRI区分能力较弱。
2)综合5个单波段特征、3个植被指数和20个纹理特征的林木受损程度提取方法中,RF分类器的分类结果明显比SVM分类器的效果好,其中RF分类器的总体精度和Kappa系数分别为89.76%和0.85。
3)无人机具有地面分辨率高、操作灵活等特点,可快速获取过火区域的高空间分辨率影像,与传统调查方法相比,使用多光谱无人机进行小范围典型森林火灾区域林木受损程度信息提取效率更高,是对大区域森林火灾受损信息提取的补充。对火烧迹地研究和森林火灾的监测影像识别等具有重要参考价值。
