基于MPC 的直接电流控制光伏最大功率点跟踪
2024-03-10吴圳宾夏祥武杨克新
吴圳宾,夏祥武,2,谭 新,杨克新
(1.上海电力大学电气工程学院,上海 200090;2.中煤科工集团上海有限公司,上海 200030)
随着传统能源的日益枯竭,太阳能作为一种清洁的新能源备受人们关注[1]。追踪光伏电池系统的最大功率点(MPP)并让系统稳定运行在该点成为了许多学者的研究热点。传统的追踪方法存在着追踪速度和追踪精度的矛盾,因此许多学者提出了改进的方法。文献[2]提出一种变步长速度因子的思想,但是该种方法当V(k)和V(k-1)很接近时会出现步长等于定值的情况,从而在MPP 点附近发生定幅值的振荡。文献[3]提出一种以Δi作为变步长的方法来追踪最大功率点,这种方法也会在MPP 点附近产生较大的功率振荡。文献[4]将最大功率点追踪(MPPT)技术分类并调研了MPPT 控制技术近年发展的状况,从文献[4]中可知近几年针对MPPT 在线技术和快速改变辐射条件下的研究并不多见。文献[5]提出了一种基于扰动观察法的光伏实时追踪技术,虽然取得了良好的效果,但扰动观察法寻优速度慢,对快速改变辐射时的追踪技术并不理想。近年来针对群智能寻优技术的最大功率点追踪技术的研究呈现增长趋势[6],但群智能技术要求控制器的计算能量强,使用较强计算能力控制器的MPPT 追踪技术增加了系统成本。文献[7]使用滑模控制技术来减小最大功率点追综过程中的抖动问题,提出了一种新的基于二重积分的滑模控制技术来减小最大功率点抖动问题,并取得了良好的效果。
模型预测控制(MPC)是一种基于变换器数学模型的控制方法,由于其基于变换器模型使得控制方法速度更快,得到的结果更加精确,在多种应用中取得了良好的效果[8-10]。文献[11]将模型预测控制与扩展卡尔曼滤波器技术结合应用于光伏变换器中,只使用一个电压传感器对变换器进行控制。文献[12]将模型预测控制与极值搜索方法相结合,实现了针对电压寻优的MPPT 技术。文献[13]提出一种结合MPC 的双离散最大功率点追踪技术,但整体来说其最大功率点追踪部分复杂,计算量大。
本文针对MPP 点追踪部分提出了一种变步长的电导增量法,该方法实现简单,只需在原来电导增量法的基础上做出一些改进就能实现,同时由于采用了变步长技术,寻优速度快。同时针对MPC 控制算法部分,实现了基于模型预测直接电流控制(MPCDCC)的MPPT 技术,由于采用了直接电流控制技术,并无传统MPC 的基于PI 控制器的电压外环,使得MPC-DCC 控制器的带宽大大增加,进而使得变换器的控制精度和响应速度大大提高。
1 光伏组件模型及特性分析
理想太阳电池的等效电路可等效为恒电流源与正向二极管并联,但是在实际工程应用中的太阳电池存在分压电阻和分流电阻[12],如图1 所示为实际太阳电池的等效电路模型。
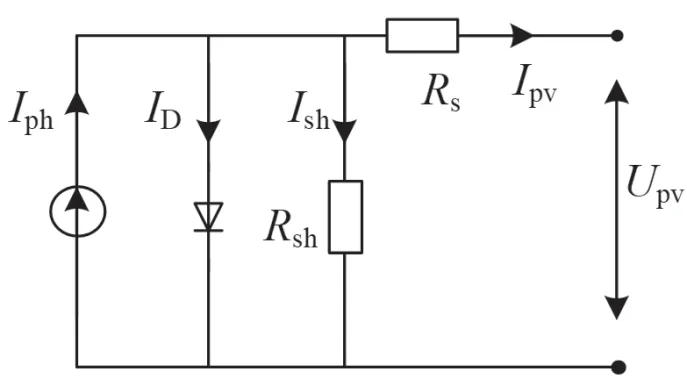
图1 太阳电池的等效电路模型
由图1 可给出太阳电池组件等效电路模型数学模型:
式中:Ipv和Upv分别为光伏组件的输出电流和端电压;Iph和ID分别为光生电流和光伏组件内部暗电流;I0和Ish分别为反向饱和电流和漏电流;Rs和Rsh为串联电阻;T为光伏组件工作环境温度;q为电子电荷数,q=1.6×10-19C;A为二极管p-n 结曲线常数,一般取值为1~2;K为玻尔兹曼常数,K=1.38×1023J/K[14]。
在实际工程中,通常取Rs=0,Rsh=∞来对光伏组件模型进行简化,因此可得光伏组件的简化模型为:
由于式(2)中二极管p-n 结曲线常数A和反向饱和电流I0的值与外界温度和光强度等条件相关,因此对其大小很难准确测量,所以工程上为了更加准确方便地描述光伏组件的输出特性,对原有的光伏组件的数学模型做出如下简化:
式中:Um和Uoc为光伏组件输出最大电压和开路电压;Im和Isc为光伏组件输出最大电流和短路电流。Um、Uoc、Im、Isc在标准环境(温度Tref为25 ℃,标准辐照度Sref=1 000 W/m2)下的具体参数由光伏电池厂提供。将实际光伏组件的工作条件与标准条件下的辐射强度差和温度差用ΔS和ΔT表示,则可以将ΔT和ΔS表示为:
因此,可得当光照强度或温度变化时,新状态下的光伏组件的参数可以表示为:
选取光伏组件输出最大电压Um=37.5 V,开路电压Uoc=32.3 V,光伏组件输出最大电流Im=8.4 A,短路电流Isc=9.2 A,在MATLAB 仿真实验平台进行仿真模型搭建,结果如图2 所示。

图2 不同光照强度下的太阳电池输出特性曲线
2 基于MPC-DCC 的改进MPPT 算法
2.1 改进电导增量法
在外界条件不变的条件下,光伏发电系统中的光伏电池板有不同且唯一的MPP 点,通过追踪光伏电池板的最大功率点电压并让系统运行在输出电压状态,就可以最大限度地将太阳能转化为电能。电导增量法是通过光伏电池板运行点的电导与电导变化率的关系来找寻光伏输出功率最大点的MPPT 算法。图3 为光伏电池P-U特性曲线。
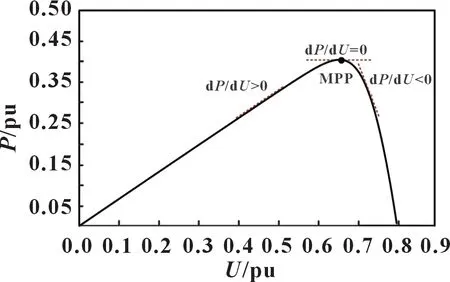
图3 光伏电池P-U特性曲线
由图3 可得,在最大功率点处,dP/dU=0,而在最大功率点两边时,dP/dU异号。因此,可以采用对dP/dU的定量分析来找寻MPP 点。光伏的瞬时输出功率表示为:
将式(6)两边对电压求导可得:
当dP/dU=0 时,光伏组件输出的功率最大,结合式(7)可以推导出,当光伏组件运行在MPP 点时,满足如下关系:
当采样时间很短时,用ΔI/ΔU代替dI/dU,则可以将最大功率点跟踪判据定义为:
k时刻的电压变化量ΔUk和电流的变化量ΔIk可以表示为:
将最大功率点的电压设为Uref,最大功率点搜寻步长设置为α,改进电导增量法的具体流程图如图4所示。
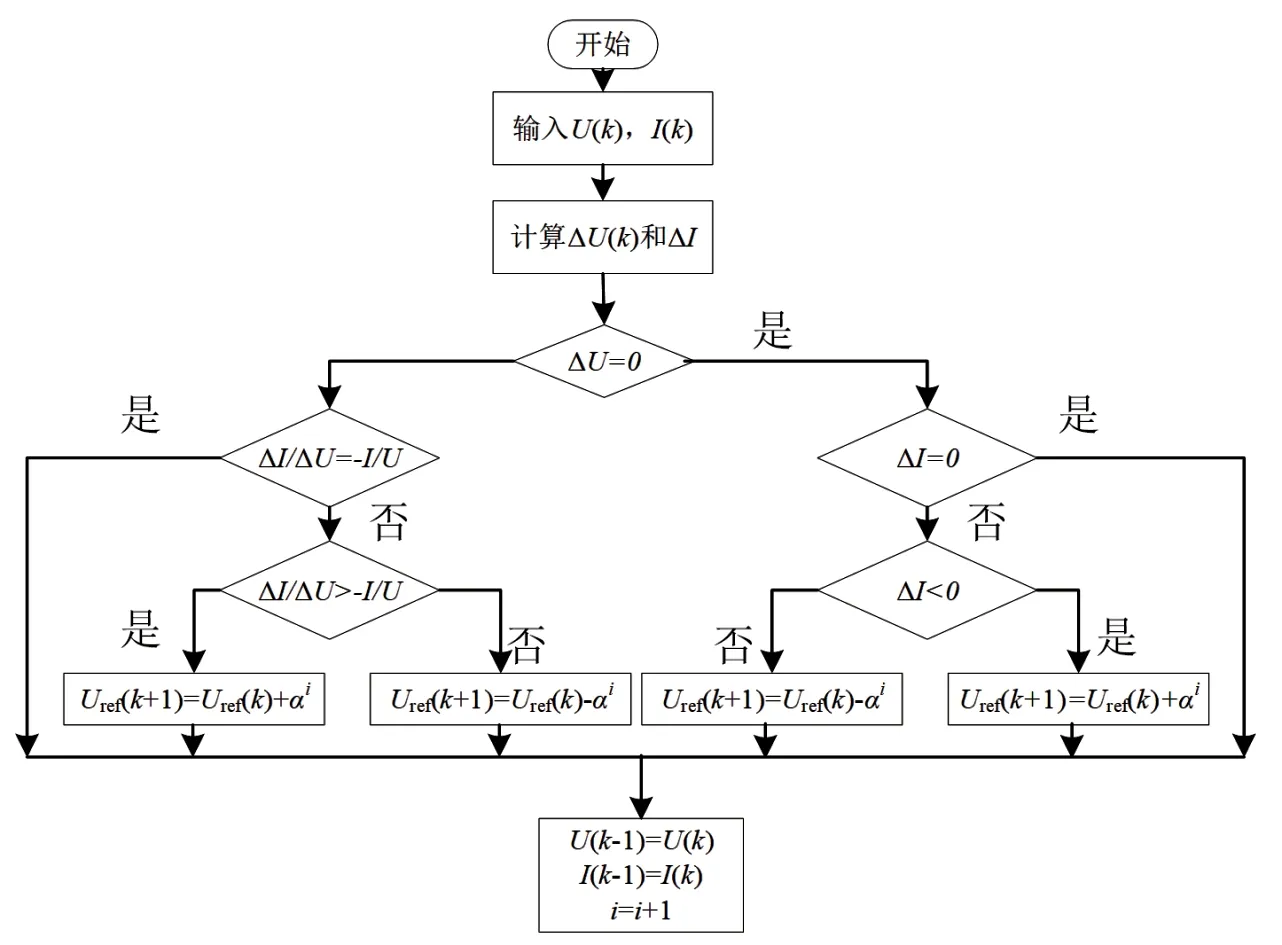
图4 改进电导增量法具体流程图
2.2 模型预测控制(MPC)
基于Boost 变换器的光伏电池控制系统如图5 所示,假设电路中的所有电气元件为理想元件,不考虑开关管的损耗。

图5 基于Boost变换器的光伏电池控制系统
MPC 控制的主要控制策略是遍历系统电路各种运行状态,对未来一个预测周期的被控制变量进行预测,再通过评估函数得出最优的一种状态,并将结果输出和返回下一次预算优化的过程。例如本文中采用的Boost 变换器电路图中有两种运行状态,即开关管处于off 状态时表示为S=0,开关管处于on 状态时表示为S=1,得MPC 控制的延时示意图,如图6 所示,图中的g表示评价函数,用来评价各个运行状态下的预测值与参考值之间的差,取评价函数值最小的输出。
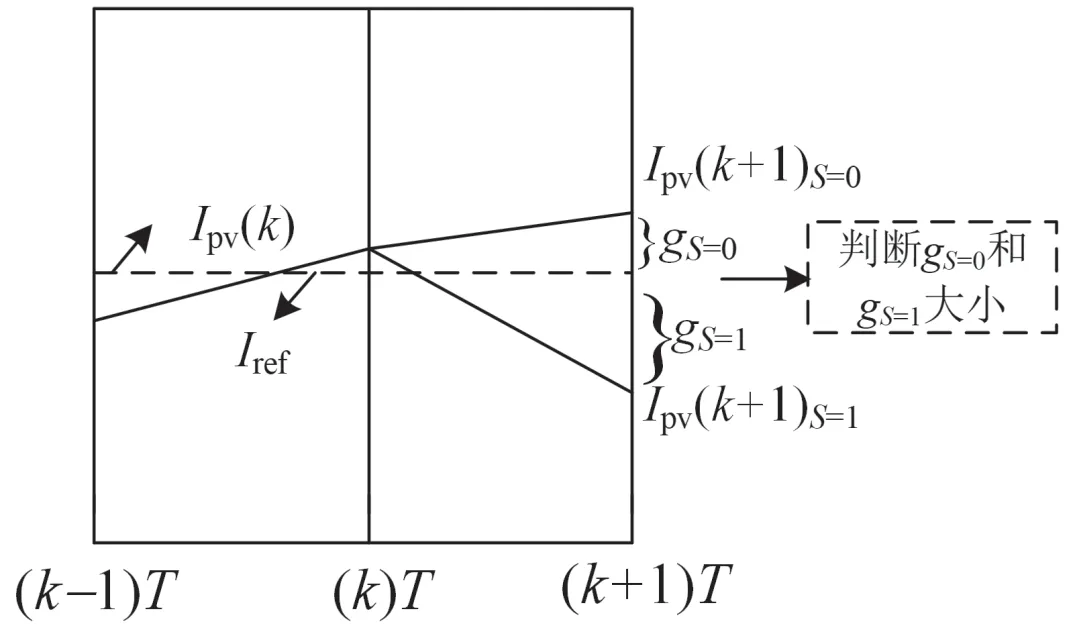
图6 模型预测控制的延时示意图
本文采用的光伏系统中开关管处于不同状态的电路图如图7 所示。

图7 光伏系统中开关管处于不同状态的电路图
当开关管断开时,即S=0 时,从电路中可得:
式(11)可以变换为:
当开关管闭合时,即S=1 时,从电路中可得:
式(14)可以变换为:
综合以上,光伏系统下一采样周期电压、电流预测值的离散形式为:
由图5 可知,Ipv(k+1)=IL(k+1),控制器仅使用PV的电流控制,因此只需控制光伏电池电流即可,采用评价函数为:
式中:λ是为了当Iref和IL很接近时防止仿真平台或实验设备因计算位数不够引起“大数吃小数”的情况而设置的一个数值较大的常量,若对精度要求不大,可以将其设置为1。
模型预测控制的流程图如图8 所示。
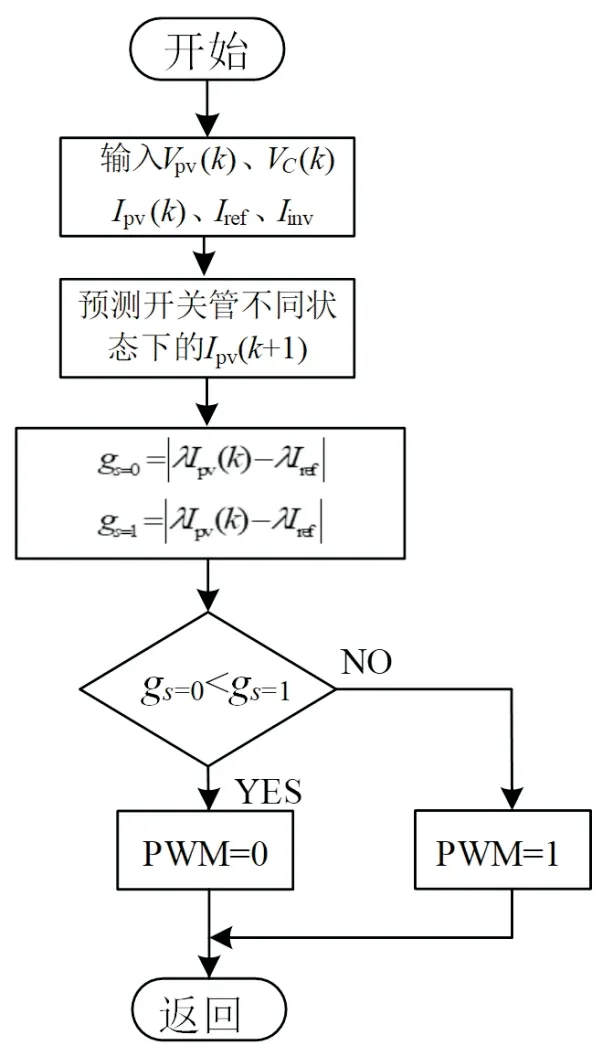
图8 基于MPC控制流程图
3 仿真及实验
3.1 Simulink 仿真
根据上述理论在Simulink 搭建光伏系统模型并进行了仿真,仿真结果如图9 所示。

图9 仿真实验结果波形图
由图9 可知,温度为25 ℃,光照强度为1 000 W/m2时,光伏系统最大输出功率为99.86 W,并且功率波动范围为1.21 W;温度为25 ℃,光照强度为400 W/m2时,光伏系统最大输出功率为37.64 W,并且功率波动范围为0.17 W;由图9(b)可以看出,追踪到的最大功率抖动幅值不超过1.35%,表明了改进电导增量法的精度。从图9(c)~(d)可以看出,追踪到的电流基本不会影响电压的变化,在光照改变过程中电流点能够快速响应。
3.2 HIL 测试
为了进一步验证所提出方法的有效性,基于RTLABOP5700 平台搭建了光伏系统模型,并进行了实验测试,实验平台如图10 所示。光伏系统模型在RT-LAB 中运行,控制算法在DSP28335 控制器中执行,使用DSP28335 控制器的AD 转换器和RT-LAB的DA 转换器分别测量输出功率、参考电流和输出电压。
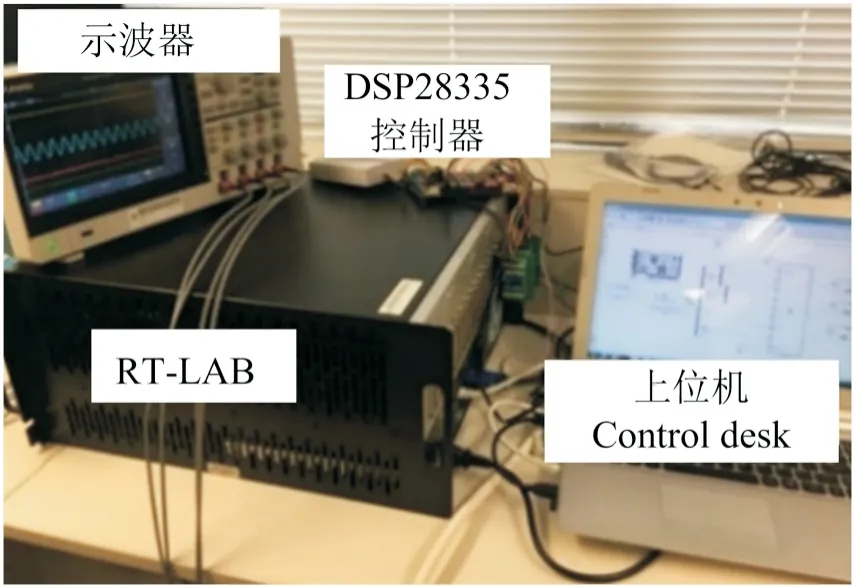
图10 基于RT-LAB的实验平台
硬件在环实验测试结果如图11 所示。
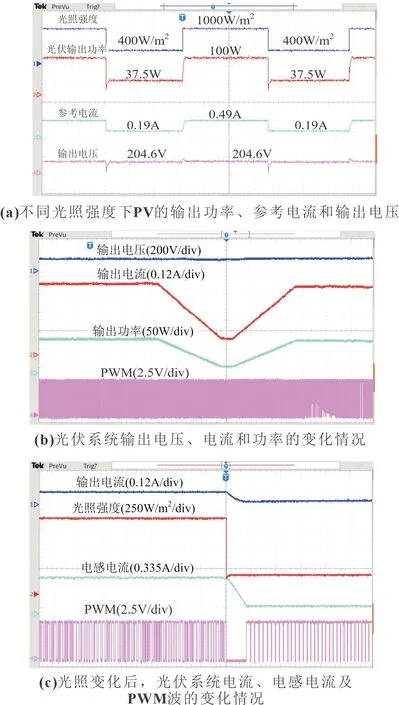
图11 硬件在环实验结果图
由图11(a)可以看出,在光照辐射强度阶跃变化时,改进电导增量法能够快速追踪到最大功率点。由图11(b)可以看出,当光照辐射强度变化时,快速追踪光伏系统电流而输出电压基本保持不变。图11(c)中呈现了光照辐射强度变化时的最大功率点电流、光伏电感电流和PWM 变化情况,从图中可知,当光照辐射强度变化时,MPC-DCC 控制器快速调整PWM 以快速控制电感电流为最大功率点电流,实现最大功率控制。HIL 测试结果表明本文所提的方法不仅能对光照改变做出快速反应,而且稳定性也很好,验证了所提方法的有效性。
4 结论
基于传统MPPT 响应速度慢,控制精度低的问题,提出了变步长电导增量法和基于MPC-DCC 控制技术的方法,以MPC 控制代替PI 控制。该方法可以弥补传统方法响应速度慢、控制精度差的缺点。用MATLAB/Simulink 进行仿真,基于RT-LABOP5700平台搭建了光伏系统模型并进行了HIL 实验测试,实验结果和仿真结果均表明本文所提方法不仅能快速追踪MPP 点并稳定运行在MPP 点,而且能快速响应光照强度的变化,表明了所提出的变步长电导增量法和MPC-DCC 的有效性。