无人机遥感在开发建设项目水土保持监测数据获取中的应用
2024-03-08石大娟
石大娟
(安徽省地质矿产勘查局325地质队,安徽 淮北 235000)
0 引言
社会经济水平的不断提高在一定程度上促进了基础设施的大量兴建,这些基础设施建设活动不可避免地对场区环境和周边地形、地貌、土壤和植被造成损毁,而且有些损毁具有不可修复性,在受到降雨和人为扰动等各种外在营力作用下发生水土流失、土壤侵蚀现象,给当地的生态环境造成危害,甚至引发一系列的地质灾害和极端生态事故[1]。因此,为了快速有效地对开发建设项目的水土保持数据进行监测是防范水土流失、提高水体保持监督管理能力的先决条件,传统的地面监测和调查监测具有效率低、采集时间长、进度差、投入人力物力大、不适合剧烈变化地形条件等缺点,极大地限制了水土保持监测技术的发展,而无人机遥感技术则可以高效便捷地获取大量的高分辨率遥感影像,并可以获取不同数据类型的影像信息,应用于水土保持工作中具有明显效果和优势[2]。
1 工程概况
某地区随着城市基础设施建设的不断开发,生产建设项目具有数量多、分布广、开发时间长等特点,基于传统的测绘手段无法满足高精度和高效率的水土保持监测要求,监管难度较大。无人机技术则具有成本低、效率高、技术相对成熟、不受地形限制、空域限制小、分辨率高等优点,在空中采集地表水土保持监测数据具有明显优势,因此借助无人机遥感技术对辖区内的开发建设项目进行快速监测、长期监测成为有效的测绘解决手段[3]。
2 基于无人机遥感技术的开发建设项目水
土保持监测数据获取过程在开发建设项目水土保持监测数据获取过程中,采取的无人机遥感系统主要有4个部分组成,分别为无人机航拍获取平台、数据信息传输系统、地面监测和接收装置、飞行控制和任务执行系统,其中,无人机航拍获取平台为无人机飞行器本体、摄像装置、动力驱动装置等,根据任务的不同可以搭载CCD数码摄像机、红外线摄像机、合成孔径雷达等,以获取不同数据类型的遥感影像[4-5]。本文选取的无人机航拍飞行器为大疆精灵M300 RTK测绘专用无人飞行器,其长度×宽度×高度尺寸(展开)为81 cm×67 cm×43 cm,包含双电池的空机重量为6.3 kg,最大载重为2.7 kg,最大水平飞行速度为23 m/s,最大飞行海拔高度为5 000m,最大可承受风速为15 m/s(7级风),最大飞行时间为55 min,垂直悬停精度误差(P-GPS)小于10 cm,水平悬停精度误差(P-GPS)小于15 cm。无人机航拍飞行器搭载的COMS影像传感器,传感器信号为赛尔PSDK102S,总像素大于1.2亿像素点,有效像素为2 430像素点,单相机图像分辨率为6 000像素点×4 000像素点,摄像机镜头数量为5个,镜头倾斜角度45°,最大俯仰轴旋转角速度为300°/s,最大航向轴旋转角度为100°/s,最大俯仰角度为30°,在S模式下,最大垂直上升速度为6 m/s,最大垂直下降速度为5 m/s,RTK位置精度为水平1 cm+1 ppm、垂直1.5 cm+1 ppm,数字信息传输系统是联系无人机航拍获取平台与地面监测和接收装置的信息传递媒介,含有数据信息发射和接收装置,可以采取的传输方式有短波数据链路、超短波数据链路和微波视距数据链路,联合地面监测和接收装置可以实时查看无人机传回的数据影响信息,数据信息传输的最大有效距离约4 000 m[6]。飞行控制和任务执行系统主要为无人机的飞行提供定位控制和巡航导航,包括控制仪表、GPS定位系统、运动速度和加速度传感器、环境气压及飞行高度传感器等,飞行器定位系统GNSS GPS可有4个选项,分别为中国BeiDou,美国GPS,俄罗斯GLONASS和欧盟Galileo。结合无人机遥感技术,针对工程项目的实际情况对研究区内的水土保持监测指标及信息特征进行获取,详细的监管指标及信息提取方法如图1所示。
基于无人机遥感技术的开发建设项目水土保持监测数据采集分为资料收集与预处理、无人机摄影测量和合规性详查3个阶段。在资料收集与预处理阶段,主要是根据收集到的批复项目方案、特性表、防治范围图件、批复、评审记录和高分正射遥感影响等进行空间矢量化,形成项目扰动范围图、防治责任图、水体流失防治分区图、水土保持措施布局图。随后进入无人机摄影测量阶段,根据预处理成果展开合规性预判,制定无人机航飞方案,并展开现场航飞和航拍数据处理,利用建模行间,形成现场高精度数值正射影像模型(DOM)、数字表面模型(DSM)、数字高程模型(DEM)和实景三维模型等。
为了提高无人机遥感技术的测试精度和测试速度,在测绘时对各个设备进行了校准操作,在地表平面不同位置布置靶标球,球的间隔为30~50 m一个。无人机遥感技术测绘前,对现场地形进行踏勘,在根据现场踏勘情况设计无人机航拍获取平台的飞行航线,随后架设基站、地面监测和接收装置、安装设备,开启无人机,待其进入采集航线时,打开无人机航拍COMS影像传感器和GPS定位系统,点击“开始采集”对现场数据进行采集,结束采集后,点击“结束采集”关闭影像采集,将收集到的数据进行格式转换和数据预处理。按照坡度变化的滤波算法,对影像数据采集过程中的噪声点、离群点进行滤除,其滤波的基本原理是按照高程坡度变化去顶最优滤波函数,即给定两点的高程,如果其高程差超出地面或者水面,对其进行滤除,滤波的约束函数如公式(1)所示[7]。
hpi-hpj>Δhmax(d(pi,pj))
(1)
式中:hpi为影像图中第i个点的高程,m;hpj为影像图中第j个点的高程,m;△hmax(d(pi,pj))为第i个点与第j个点的高程差阈值,m。
根据阈值的置信区间,确定无人机遥感技术的影像图滤波函数如公式(2)所示[8]。
Δhmax(d(pi,pj))=cd+f(pi,pj,a)
(2)
式中:d为第i个点与第j个点的距离,m;c为第i个点与第j个点的坡度,度;a为显著水平;f (pi,pj,a)为改正函数。
滤波后的影像图数据集符合公式(3)。
B={pi∈A∣∀pi∈A:hpi-hpj≤Δhmax(d(pi,pj))}
(3)
式中:B为影像图滤波后的集合;A为影像图原始数据集合。
3 基于无人机遥感技术的开发建设项目水
土保持监测数据分析为了分析无人机遥感技术数据的精度,对开发建设项目地形数据进行测量中误差计算,其计算方法如公式(4)所示。
(4)
式中:δ为数据高程模型中误差;n为数据样本总量;Zi为检查点的高程,m;Ri为数据高程模型内插点高程,m。
对开发建设项目地形三维数字高程模型(DEM)数据点进行中误差分析,按照现场地形高程差0~10 m、10~14 m、14~18 m和>18 m进行数据分级,每级数据抽取500个数据样本点,其中误差计算结果如图2和表1所示。从图2中可以看出,不同高程范围的三维数字高程模型数据中误差呈现不同程度的波动,除了个别数据点的中误差出现剧烈波动外,各个高程范围的三维数字高程模型数据中误差均有一个稳定的波动范围,并随着高程差的不断减小,其中误差也不断减小。在高程差≥18m时,其中误差平均值为108.74 mm,而在高程差范围为14~18 m时,其中误差平均值为100.11 mm,在高程差范围为10~14 m时,其中误差平均值为88.86 mm,在高程差为0~14 m时,其中误差平均值为84.74 mm。

表1 基于无人机遥感的三维数字高程模型数据中误差计算结果
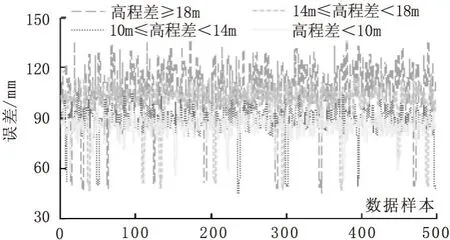
图2 不同高程差范围的三维数字高程模型数据中误差计算曲线
对各个高程差范围的三维数字高程模型数据中误差进行频数统计,结果如图3和表2所示。从图3中可以看出,不同高程差的三维数字高程模型数据中误差的集中度存在显著的不同,在高程差≥18 m时,其中误差主要集中在110~120 mm,频数为157,其次为100~110 mm,频数为128;而在高程差范围为14~18 m时,其中误差主要集中在110~120 mm,频数为268,其次为90~100 mm,频数为162;在高程差范围为10~14 m时,其中误差主要集中在90~100 mm,频数为225,其次为80~90 mm,频数为223;在高程差小于10 m时,其中误差主要集中在80~90 mm,频数为326,其次为90~100 mm,频数为92。

表2 基于无人机遥感的三维数字高程模型数据中误差频数计算结果

图3 不同高程差范围的三维数字高程模型数据中误差频数分布
为了验证无人机遥感技术的测试精度,也采取了机载三维激光雷达扫描技术进行平行试验,以机载三维激光雷达扫描技术测试成果为基准,将无人机遥感技术实测结果与之对比,计算平面误差如表3所示。从表3中可以看出,基于无人机遥感技术的测绘成果精度较高,其平面误差△xy控制在0.0285~0.143 m范围内,远小于0.250 m的规范控制要求。

表3 三维激光雷达扫描技术与水上多波束测量技术的地形测绘成果对比
4 结语
本文基于无人机遥感技术对研究区内的开发建设项目进行监测,并采用机载三维激光雷达扫描技术进行平行试验,研究其监测数据获取方法及监测效果,得到以下几个结论:
(1)不同高程范围的三维数字高程模型数据中误差呈现不同程度的波动,除了个别数据点的中误差出现剧烈波动外,各个高程范围的三维数字高程模型数据中误差均有一个稳定的波动范围,并随着高程差的不断减小,其中误差也不断减小;
(2)不同高程差的三维数字高程模型数据中误差的集中度存在显著的不同,在高程差≥18 m时,其中误差主要集中在110~120 mm;在高程差范围为14~18 m时,其中误差主要集中在110~120 mm;在高程差范围为10~14 m时,其中误差主要集中在90~100 mm;在高程差小于10 m时,其中误差主要集中在80~90 mm。
(3)无人机遥感技术的测绘成果精度较高,其平面误差控制在0.028 5~0.143 m范围内,远小于0.250 m的规范控制要求。
