舰载机着舰侧向轨迹增量控制
2024-03-08王正磊岳付昌
汪 节,韩 维,王正磊,岳付昌
(1.海军航空大学,山东 烟台 264001;2.91475部队,辽宁 葫芦岛 125001)
0 引言
舰载机的着舰技术和能力,直接关系到航母整个体系作战能力。飞机侧向的着舰难度较大[1-8]:1) 横滚、偏航、侧偏等运动复杂耦合;2) 着舰过程中会有侧风、舰尾流、甲板运动等干扰;3) 触舰拦阻时滚转、偏航、侧偏必须保持在很小的误差范围内,以防止拦阻受力失衡过大而发生拦阻事故。
飞行员常需要通过压坡度或蹬舵的方式修正侧偏。以往侧向着舰控制,飞行员一般是直接控制滚转角或滚转角速率[1-8],此控制方式(如图1 所示)的缺点如下[1-8]:1) 飞行员操作较为频繁,例如,修正右偏离时需要先左滚让速度矢量左偏,再右滚让速度矢量恢复到原来状态,最后小幅左右来回滚转调整以使速度矢量回到基准状态。飞行员蹬舵同理。2) 飞行员总需要保持1个侧向杆量来跟踪降落跑道对中线。由于甲板降落跑道对中线和航母航速方向存在夹角,对中线总有1 个侧向速度分量,导致飞机总需要1 个横向速度分量来跟踪甲板中心线,飞行员需要保持1 个常值侧向杆量。3) 对舰尾流的侧风没有抑制能力,完全依赖飞行员的人工操纵。
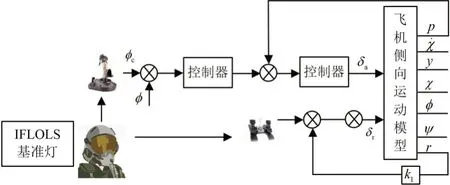
图1 着舰侧向常规控制结构Fig.1 Lateral conventional control structure for carrier landing
2016 年美海军试飞成功的“魔毯”(MAGIC CARPET)着舰技术,被称为着舰“游戏规则改变者”。该技术中1 个重要改变是采用了纵向轨迹增量控制,着舰试飞效果显著[9-19]。本文将此思想方法应用到侧向着舰上,提出侧向轨迹增量控制;深入分析着舰侧向轨迹增量控制的工作机理和着舰性能,为着舰领域的工程应用提供参考。
1 着舰侧向常规控制结构
图1 为着舰侧向常规控制结构[7]。襟副翼通道控制滚转角,内回路为滚转角速率控制,增加滚转阻尼;方向舵通道为偏航角速率反馈,增加航向阻尼。飞行员用侧向杆来控制飞机滚转,用脚蹬来控制飞机机头航向。
当侧偏较小时,飞行员会选择用脚蹬来改变飞机航向,由于飞机的航向静稳定性,侧向轨迹会跟踪机头方向,当修正完毕后,飞行员再操纵恢复机头指向。这种操纵方式的缺点是,飞机航向会变化,同时飞行员需要多次反复调整。
当侧偏较大时,飞行员一般会选择用横杆压坡度来修正,同时协调操纵脚蹬,控制航向。
当出现侧风时,飞行员可以选用侧航法或侧滑法进行修正。如果飞机的侧向对纵向没有解耦,那么飞行员会倾向于选择侧航法修正,让机头指向风的来向,以避免侧滑法的滚转修正对纵向动力学(升力等)的不良耦合影响。
2 着舰侧向轨迹增量控制
借鉴美国海军的MAGIC CARPET着舰理念[10-11],提出侧向轨迹增量控制方法,如图2所示,在原有滚转角控制回路的基础上,增加轨迹速率控制回路和轨迹增量控制回路,同时保持机头航向。对各舵面通道和各层回路控制性能进行分析。

图2 着舰侧向轨迹增量控制Fig.2 Lateral delta ground track command structure for carrier landing
2.1 襟副翼通道
图2 中,将襟副翼通道作为主通道,控制侧向轨迹,因为副翼的控制效能要大于方向舵[6]。
2.1.1 侧向轨迹角速率控制
在传统滚转角控制的基础上,增加侧向轨迹角速率控制回路,此控制结构的设计意义在于:侧向轨迹角速率直接对应侧向过载(如式1),因而当有侧风或横向舰尾流的干扰时,此干扰会立即(零相位差、零时差)引起侧向过载变化(如式2),而侧向轨迹角速率的反馈会让飞控系统迅速反应,改变滚转姿态(如式3),抵消风干扰[20]。
令式(2)为0 rad/s,得到:
式(1)~(3)中:χ̇为侧向轨迹角速率;V为进场速度;L为升力;φ为滚转角;Cβ为侧力对侧滑角的导数;βw为风干扰所引起的侧滑角。由于侧风引起的侧力很小(相对于飞机升力),因此自动响应的滚转角也很小,故式(3)的约等于成立。
2.1.2 侧向轨迹角控制
在上述侧向轨迹角速率控制回路的基础上,继续增加侧向轨迹角控制回路,此控制结构的设计意义如下[10]。
1) 飞行员感觉很直观。因为侧向轨迹角直接对应于飞机的地速的横向分量,如式(4)。
式(4)中,ẏ为侧向速度。飞机侧向速度相对于进场速度很小,因而式(4)的约等于成立。
2) 提高了飞行的控制层级,减小了飞行员操纵负担,着舰操纵容易。如式(2),滚转角和侧向轨迹角在动力学上相差了1次积分(即相位相差了90°);飞行员只需对轨迹层面进行控制,滚转角层面的控制由飞控系统根据滚转角指令(由轨迹角回路运算出)进行。
3) 更好地抑制侧风和侧向舰尾流。风干扰与侧向轨迹角速率是同相的,侧向轨迹角比侧向轨迹角速率滞后90°,因此侧向轨迹控制回路自然也包围住风干扰信号,进而使系统具有较强的鲁棒性,对风干扰具有较强的抑制能力[20]。
2.1.3 侧向轨迹角增量控制
在指令前向通道中加入侧向基准指令,进而飞行员杆指令即对应侧向轨迹角增量指令,见图2 和式(5)。
式(5)中:Xstick为侧向杆位移量;χc为侧向轨迹角指令;χref为侧向基准轨迹;Δχc为侧向轨迹增量指令。
舰载机着舰时,为了减小舰机相对速度和减小甲板运动幅度,航母会以大概Vship=30 kn(15.4 m/s)的速度航行。由于斜甲板(航母降落跑道)与航母艏艉有固定夹角φship(约11°),所以斜甲板中心线会因为航母航行而有1个向右的侧向速度分量,如下:
飞机在基准状态,是要跟踪此侧向速度分量的,如式(7);进而可得到侧向基准轨迹,如式(8)。
如式(8),飞行员需要事先通过人机接口,将航母航向、航速等输入到飞控系统中。飞控系统即可算出侧向基准轨迹χref,然后执行图2 所示的侧向轨迹增量控制。
设计增量控制策略,如式(5)。此设计意义在于[10]:让侧向操纵更直观、简单。详细分析如下。
1) 让侧向操纵更直观。飞行员的侧向杆位移与舰机侧向相对速度成正比,即与侧向纠偏速率成正比,如式(11)。
当轨迹能很好控制时,有:
由于侧向轨迹角在着舰中很小,有:
由式(4)(5)(8)~(10),得到:
式(11)中:k2=k V,由于着舰时速度保持,进场速度基本不变,故k2可认为是常值;ẏrelative为舰机侧向相对速度(也是横向纠偏速度)。
2) 让侧向操纵更容易。如式(11)中,当Xstick=0时,ẏrelative=0。这说明,当飞机侧向偏差纠正快到0 m时,飞行员只需要松横杆即可,当侧杆回中时,飞机能自动跟踪跑道中心线的侧向漂移。
侧向轨迹控制需要很高的精度,因而无论通过什么方法设计(如PID、滑模、动态逆等),最后控制器中都应包含积分器项。所以,实现方式上可用比例+积分控制。
2.2 方向舵通道
方向舵通道,有2种方案可选择:飞行员单独控制和飞行员飞控联合控制。
1) 由飞行员脚蹬进行单独控制,飞控系统只增加航向阻尼,如图1[7]。这种方案的优点是给了飞行员较大的自主权,缺点是增加了飞行员的负担。
2) 飞控系统以某种方式控制方向舵通道,同时保留飞行员脚蹬的控制。实际运行时,一般由飞控系统自动控制方向舵通道;当飞行员觉得需要补偿航向控制时,即脚蹬输入,如图2。
飞控系统控制方向舵通道,有2种方案可选择,各有利弊[1-6]。
1) 稳定航向方案,让飞机机头始终平行于甲板跑道中线。优点是有利于触舰拦阻(拦阻索两侧受力平衡),同时飞行员视场始终正对着横向对中线。缺点是修正侧偏时会有侧滑角存在,且侧滑角引起的侧力效应会一定程度减弱横向修正。另外,在有侧风干扰时,飞机会以滚转来抵消风干扰(即侧滑法),而滚转又影响纵向升力。
2) 消除侧滑方案,让机头始终跟踪侧向轨迹的方向。优点是当横向纠偏时,不会出现出现侧滑角影响横向修正。当出现风干扰时,不需要滚转来对抗风干扰。缺点是无论横向纠偏,还是抵消风干扰,都需要改变航向(飞机机头指向)。
综合来看,选用稳定航向方案有利于飞行员的视角和最后的拦阻。侧风的侧力效应远小于升力,因此滚转幅度较小;而滚转对升力的影响,可以通过纵侧向的解耦设计来消除。
3 HUD显示符号改进
“魔毯”项目中,在进行纵向轨迹增量控制的同时,其HUD 显示符号[9-10,16]也进行了改进,即增加了可上下移动的相对于舰船的显示符号(Ship Relative Velocity Vector,SRVV)以及固定的下滑道基准线(Glide Slope Reference Line,GSRL)。SRVV 和GSRL的相对位置,与纵向杆量、下滑道修正速率皆成正比,飞行员可以很直观地进行纵向修正。
本文进行侧向轨迹增量控制。因此,也同样改进HUD显示符号,如图3所示。
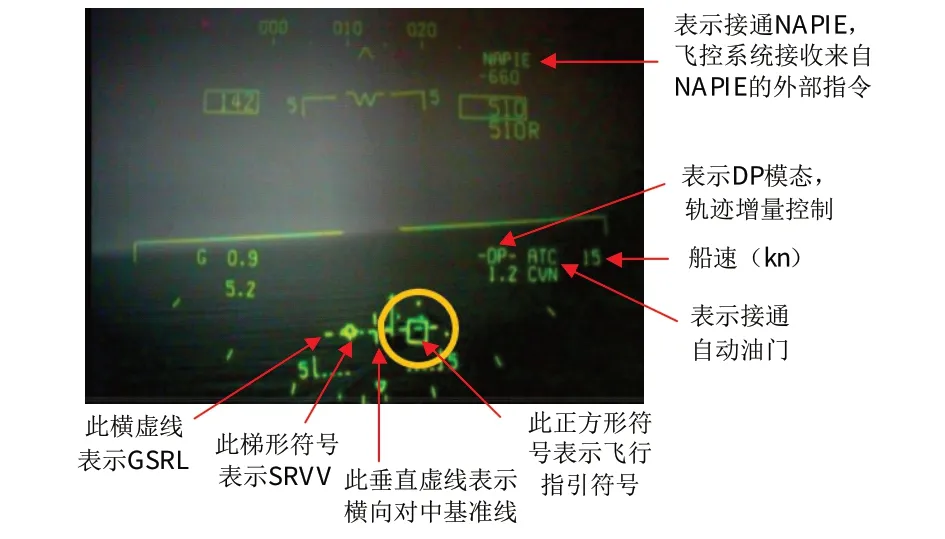
图3 改进的HUD显示符号Fig.3 Improved HUD display symbols
增加固定的竖向短划线表示横向对中基准线(Line-UP Reference Line,LURL),进而与GSRL 形成了十字型符号结构。同时,让SRVV也可以左右移动。进而,SRVV 与横向对中基准线LURL 的相对位置,与侧向杆量、侧向对中修正速率皆成正比,进而可以让飞行员可以很直观地进行侧向修正。
4 仿真分析
在计算机上连接操纵杆,与MATLAB Simulink通信,进行实时着舰控制仿真,并用视景软件显示着舰视景。接上操纵杆,模拟飞行员操纵,实时修正对中偏差。从离舰1 400 m 时开始仿真,进场速度70 m/s,斜甲板9.5°,船速25 kn,基准侧向轨迹为1.7°。着舰仿真实验分成2组:实验组采用侧向轨迹增量控制(常规舵面);对照组采用常规控制(常规舵面)。在不同条件进行仿真,比较实验组和对照组的结果。
1) 实验条件一:初始偏差10 m+飞行员实时操纵。
图4~7 中的变量,从左到右、从上到下,分别是侧向轨迹增量、侧向对中偏差、侧向漂移速度、滚转角;航向角、侧滑角、襟副翼、方向舵。
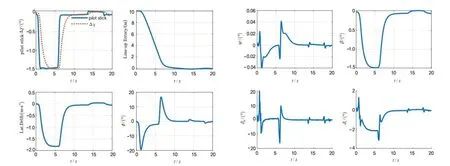
图4 基于侧向轨迹增量控制的飞行员修正Fig.4 Pilot correction of carrier landing based on lateral delta ground track command
图4 显示,当采用“侧向轨迹增量控制+飞行员实时操纵”时,飞行员操纵负担明显减小:①可以进行“一杆输入”策略(即修正偏差时只需保持1 个稳态杆值,在偏差将要修正完毕时松杆),整个过程,侧向轨迹增量能很好地跟踪飞行员侧杆指令;②松杆后,图4中的飞机能如前文所述,侧向轨迹角增量也为0,侧向轨迹自动恢复到侧向基准轨迹。
图5 显示,当采用“侧向常规控制+飞行员实时操纵”时,飞行操纵负担较大:①飞机滚转角能很好地跟踪飞行员的侧向杆指令,飞行员需要有较大的回杆时机预期,才能避免轨迹和侧偏的过大超调;②飞行员需要来回调整侧向杆,才能将修正侧偏;③稳态时,需要1 个稳态常值侧杆量,才能让飞机跟踪甲板中心线的向右漂移。
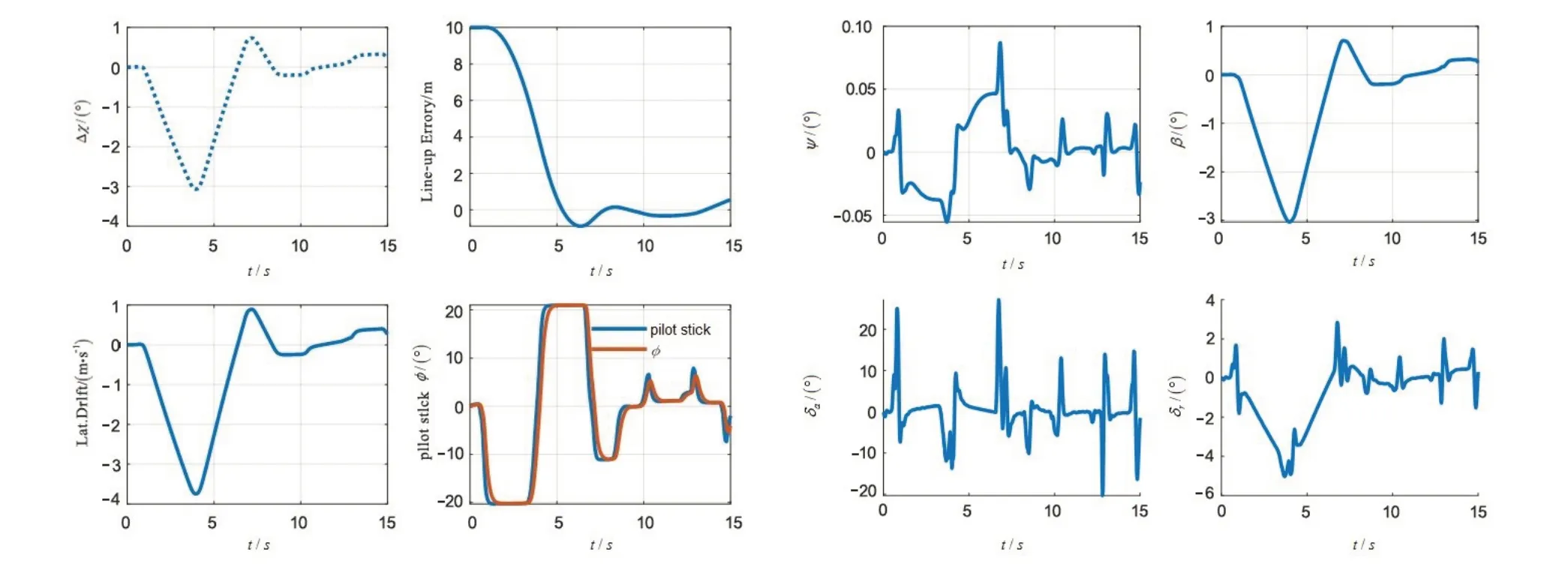
图5 基于侧向常规控制的飞行员修正Fig.5 Pilot correction of carrier landing based on lateral conventional control
2) 实验条件二:侧风1 m/s+飞行员不操纵。
图6中,当采用“侧向轨迹增量控制+飞行不操纵”时,飞机对风干扰有很好的抑制能力:①飞机受到的影响较小,整个过程的侧偏为0.7 m;②飞机在受到风扰时迅速反应,侧向轨迹不断恢复到基准轨迹,在第30 s 时,完全恢复到基准轨迹,侧偏也最终稳定在0.7 m。这是因为控制结构中,有侧向轨迹角速率的反馈(与风干扰同相)和侧向轨迹角的反馈,这两层回路都包围了风干扰信号,进而系统会有快速抵抗干扰的能力。
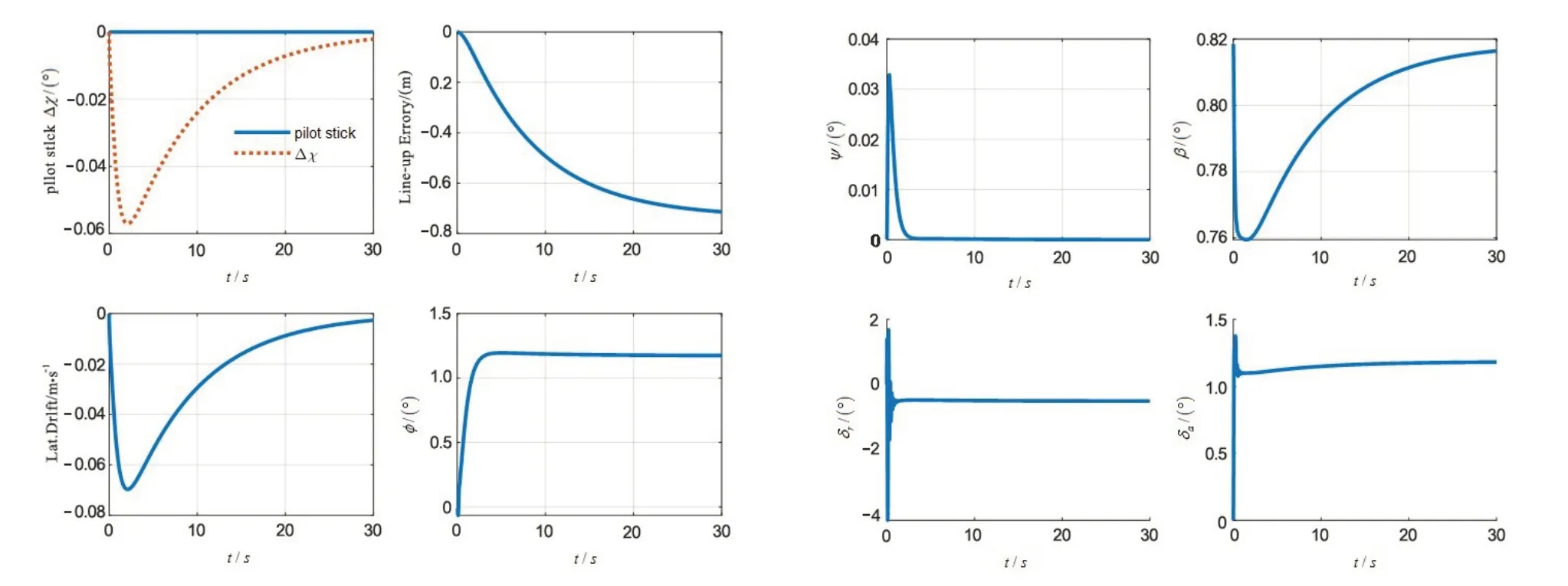
图6 基于侧向轨迹增量控制的风干扰Fig.6 Wind disturbance of carrier landing based on lateral delta ground track command
图7 中,当采用“侧向常规控制+飞行员不操纵”时,飞机侧偏会持续受到影响,侧向轨迹无法恢复(最终稳定在0.8°),侧偏会越来越大。这是因为没有回路包围风干扰的信号,控制系统接受不到风干扰的信号,无法做出响应和抑制风干扰。

图7 基于侧向常规控制的风干扰Fig.7 Wind disturbance of carrier landing based on lateral conventional control
5 结论
本文参考美军“魔毯”着舰技术的纵向轨迹增量控制思想,提出舰载机着舰侧向轨迹增量控制,在原有滚转角控制回路的基础上,增加轨迹速率控制回路和轨迹增量控制回路,同时保持航向。本文从理论和仿真2 个角度进行了研究,结果显示着舰性能比侧向常规控制要优秀。主要优点是有:
1) 简易。降低了飞行员的操纵频次和操纵负担,提高了飞行员控制层级。
2) 直观。着舰侧向操纵更直观,侧向杆量与飞机侧偏修正速率成正比例,而且当横杆回中时飞机能自动跟踪跑道中心线的横向漂移。另外,本文对HUD显示符号的改进,让飞行员基于侧向轨迹增量控制的着舰操纵更加直观。
3) 鲁棒。显著提高了侧风和舰尾流抑制能力,即使在飞行员不操纵的情况下,飞机也能迅速反应和抑制风干扰。
因此,如着舰工程中采用本文所提出的侧向轨迹增量方法,可在不增加任何侧向舵面的情况下,只需要改进侧向控制结构,即可显著降低飞行员操纵负担,并提高着舰性能。