基于BUCK恒流电路的LED光源调节控制技术研究
2024-03-08刘佩佩马雨欣陈晓龙周剑烽钱陈豪俞建峰
刘佩佩,马雨欣,陈晓龙,周剑烽,钱陈豪,俞建峰
(1.江南大学机械工程学院,江苏 无锡 214122;2.江苏省食品先进制造装备技术重点实验室,江苏 无锡 214122;3.无锡中科光电技术有限公司,江苏 无锡 214135)
0 引言
气溶胶激光雷达(aerosol lidar,ALD)是大气颗粒物的测量装置。ALD出厂前需在特定条件下对其接收系统进行校准[1],接收系统的精确校准已成为激光雷达研究领域关注的焦点。现有的ALD接收系统的校准方法需要在特定场景下制备一定浓度的气溶胶来模拟大气环境,并配合光电仪器组建校准平台[2-4]。由于制备的气溶胶浓度不够精准,导致ALD校准的精确度受到影响,并且难以实现结果的复现。模拟光源法能实现ALD接收系统快速且精密的校准。该方法利用可控光源发出规定照度的光波,照射至ALD接收系统,通过数字信号处理算法将接收系统采集到的光波信号的照度值和模拟光源预设发出的照度值进行对比分析[5-6],可以得到通道的线性度、不同通道之间的串扰等测试项目的值,以此实现校准工作。在光源调制过程中,由于光源的照度与驱动电流之间存在非线性关系,电流即使略微变化,也会导致照度变化较大。因此,研究高准确度和高稳定性的LED光源电流调节控制方法是实现激光雷达精准校准的关键。
传统的LED电流调节方法主要有无源调节法和有源调节法[7]。He等[8]基于无源调节法设计了多通道恒流LED驱动器,交直流变换后的电信号经过由高频半桥逆变器和无源谐振整流器组成的无源谐振网络后实现了恒流输出,将输出电流偏差控制在了±0.5%,但是无源调节法无法在线实时改变电路的目标电流值,因此这种电流调节方式不适合ALD模拟光源的调节。对于有源调节法而言,PWM占空比的大小直接对应了输出电流的大小,可以根据需要更改目标电流,在模拟光源法中这一优点尤为重要。Lin等[9]设计了基于有源调节法的小型LED驱动电路,通过调节PWM占空比来控制多晶硅薄膜晶体管,以驱动LED恒流工作,最终电路输出电流精准度为95.33%;代培彦[10]设计了一款PWM调光恒流控制器,当控制LED工作在电流为60 mA~2 A条件下时,电流精准度为97%;Li等[11]设计了一款单电感多输出的LED驱动器,该驱动器通过在LED前级串联单电感、在输出端并联滤波电容,可以将调光精准度控制在99.2%。以上研究虽然在一定程度上提高了光源调节的精准度,但在用于ALD校准时仍有待进一步提高。
本文提出了一种基于BUCK恒流电路的ALD校准光源调节控制技术。通过嵌入式系统输出PWM脉冲信号,脉冲信号控制BUCK电路中的半导体场效应管(metal oxide semiconductor field effect transistor,MOSFET)输出精确的电流信号,驱动外置光源LED工作。同时将LED的工作电流实时反馈至嵌入式系统,通过PID自整定算法对反馈得到的参量进行PWM信号的调整,来调节LED的工作电流,以此形成闭环反馈回路,保证LED工作在恒流状态。本文设计的方法具有工作损耗小、电流调节精准度高的特点,有望广泛应用于ALD的精准校准工作中。
1 LED光源调节控制技术研究
1.1 光源调节控制系统的总体框架设计
LED光源调节控制系统的总体设计如图1所示,主要由上位监控层、下位控制层和硬件电路层组成。当用户在上位监控层的PC端输入LED的目标工作电流后,PC端将根据目标电流生成控制信号,并通过串口通信协议传输给下位控制层。下位控制层中的嵌入式系统接收到控制指令后输出对应的PWM信号给硬件电路层,经过硬件电路层中MOSFET后获得电流信号,从而驱动LED芯片工作。此外,下位控制层内还需对LED芯片的工作电流进行实时采样,构造负反馈回路,实现闭环控制。负反馈回路通过采样电阻将LED的实时工作电流转换为采样电阻两端的电压,经过电压放大电路由模数转换器(analog to digital converter,ADC)将电压采样回嵌入式系统, 由PID自整定算法对采样回的参量进行负反馈调节,调整PWM信号的输出,以保证LED芯片工作在目标电流下。根据ALD接收系统对接收光信号精准度方面的要求,LED光源控制电路的设计指标主要为电路中器件的功率损耗和电流调节精准度。

图1 LED光源调节控制系统的总体设计框架
1.2 驱动电路的设计
用于校准ALD的LED光源驱动控制电路原理如图2所示。图中,RCS表示将驱动主回路的RCS处和电压放大电路的RCS处相连接,ADC_IN1表示将放大后的电压传输至嵌入式系统中。

图2 LED光源驱动控制电路
驱动主回路采用BUCK电路拓扑结构,为实现恒流输出,在传统BUCK电路基础上使用ARM(advanced risc machine)架构的32位控制器来代替锯齿波生成电路生成PWM信号[12],该PWM信号用于控制BUCK电路中开关器件MOSFET的通断,并利用电路中电感能够储能的功能使电路在整个工作期间都处于连续导通模式下[13],同时结合PID自整定算法,以便实现恒流输出。此外,在驱动主回路中使用了电阻采样法对LED的实际工作电流进行实时采样,从而形成闭环控制。
由于LED的额定电流为300 mA,根据式(1)可知采样电阻Rcs两端电压,即
VRcs=I×Rcs=300 mA×1 Ω=0.3 V
(1)
式中:VRcs为采样电阻两端电压;I为采样电阻的工作电流;Rcs为采样电阻的阻值。
嵌入式系统的ADC外设满量程电压为3.3 V,一般情况下采样的电压值处于ADC检测范围的1/3~2/3之间比较准确。因为采样电压为300 mV,所以电压放大电路将该电压放大5.7倍后传输至嵌入式系统,这样将工作区放大后可以提高嵌入式系统的辨别精度。根据以上原则,结合式(2),电压放大电路将采样电阻Rcs两端电压放大5.7倍后采样至嵌入式系统。
(2)
式中:Vout为经过电压放大电路后的输出电压;Vin为输入电压放大电路的采样电阻两端电压;R1、R2为运算放大器两端的输入输出电阻。
LED驱动主回路中MOSFET处于导通状态和断开状态时电路的运行情况如图3所示。当MOSFET处于导通状态时,电流经过整流二极管D1、LED芯片、储能电感器L1、MOSFET Q1、采样电阻Rcs并流回地,此时电流不经过肖特基二极管(schottky barrier diode,SBD)D2,储能电感器充电;当MOSFET处于断开状态时,电流经过整流二极管D1、LED芯片、储能电感器L1、SBD D2,此时储能电感器放电,并为回路供电[14]。
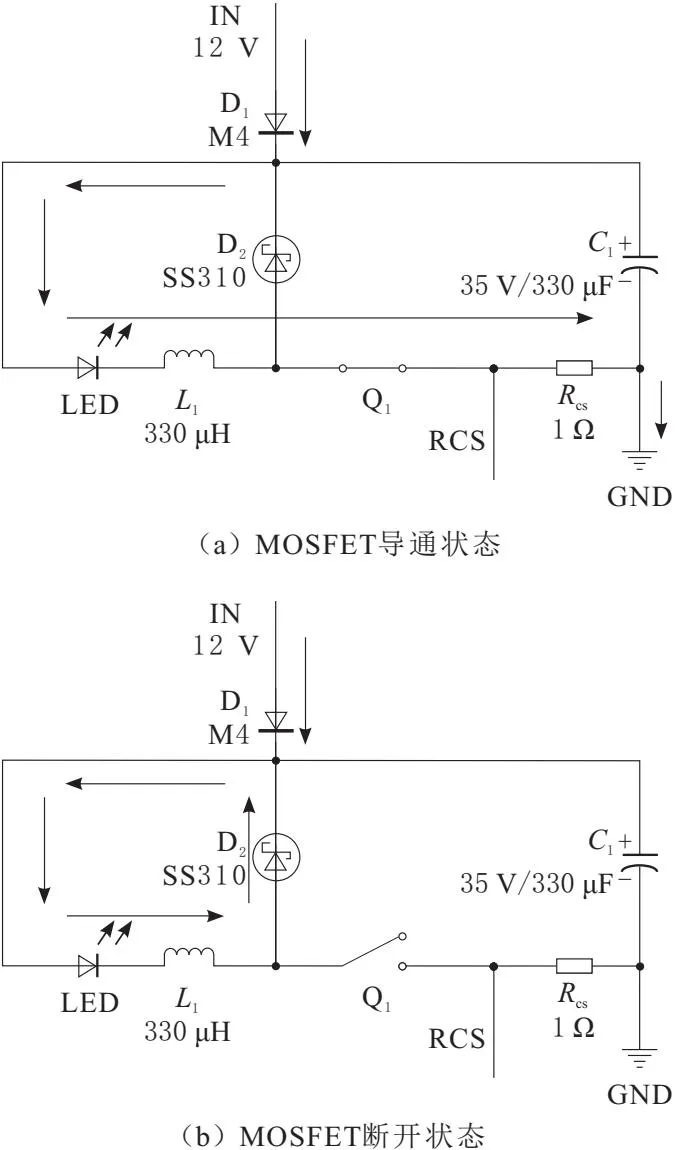
图3 MOSFET处于不同状态时电路运行情况
2 PID自整定算法研究
1984年,Astrom与Hagglund等学者提出了基于继电器反馈控制的PID控制器参数自整定方法[15],该方法不需要先验知识,可以自动地从被控对象的频率响应中抽取信息,进而得到系统的临界振荡比例增益Ku和振荡周期Tu。然后再将得到的Ku和Tu代入Z-N临界比例法定义表格,从而整定PID控制器的KP、KI、KD参数。由于该方法具有稳定性和可靠性,相较于其他改进的PID算法,如模糊PID等,基于继电器反馈控制的PID自整定法具有简单易实现、计算方便及抗干扰性能好等优势,尤其适用于低成本、实时性要求较高的控制系统[16],因此本文研究的系统中该方法更加适用。
继电器反馈控制方法通过在电路中加入有继电器特性的非线性环节得到持续稳定的振荡,进而求得中间参数——临界增益和临界周期,然后通过Z-N临界比例法计算出PID调节参数[17]。继电器反馈控制PID自整定的原理如图4所示,当需要PID参数整定时,开关放置在继电环节,系统按继电器反馈原则建立稳定的极限环振荡,之后可以根据系统响应特征来确定PID参数;当自整定计算完成后,可以控制开关放置在PID调节器环节,系统进入正常PID控制过程。
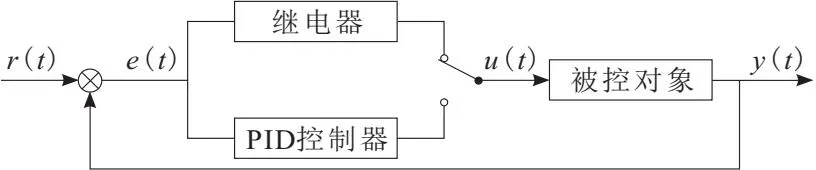
图4 继电器反馈PID自整定原理
当系统处于等幅振荡状态时,非线性元件的输入信号e(t)为正弦波,即e(t)=Asinωt,对输出信号u(t)进行谐波分析,周期为Tu,可以展开为傅里叶级数[16],即
(3)
式中:A0为直流分量;An、Bn分别为基波及各次谐波分量的幅值。
在该反馈系统中,根据闭环特征方程发生等幅振荡的条件[16]可知
(4)
式中:Ku为临界振荡比例增益;d和A分别为继电过程输入和输出的幅度。
在系统处于等幅振荡过程后,计算一个周期长度为被控过程数学模型的临界振荡周期Tu,结合式(4)计算临界振荡比例增益Ku,通过表1所示的Z-N法整定公式,可以得到PID参数,然后系统进入PID自动控制过程。

表1 Z-N临界比例法整定公式
利用Keil uVision5软件平台,编写了基于继电器反馈PID参数自整定的LED工作电流控制程序。系统设计的LED实时工作电流控制流程如图5所示,将目标值和采样得到的值进行比较,当目标值大于采样值时,增大LED的工作电流ILED至满占空比输出,此时ILED增大或减小次数i为1;第2次比较时目标值一定小于采样值,需要减小ILED至零占空比输出,此时i为2;以此循环,当i为6时,结束目标值和采样值的比较。从准确性和效率2方面考虑,让系统振荡3次后可以得到系统确定的临界工作点,再根据Z-N法进行PID参数自整定步骤,进而得到该系统的PID参数,进入PID自动控制过程。
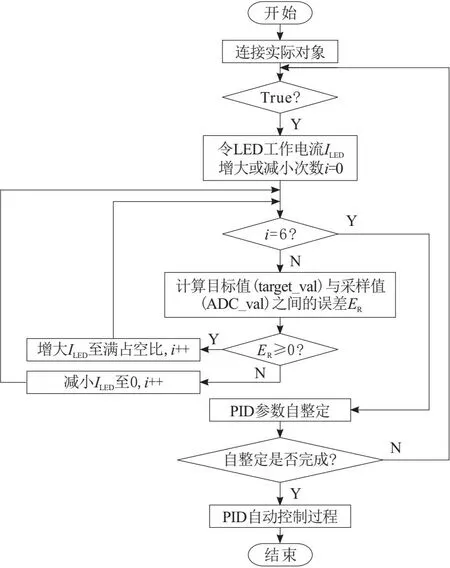
图5 LED实时工作电流控制流程
3 实验分析与讨论
在实验中使用的设施有:示波器Tektronix TBS200B,频率为200 MHz,采样模式设置为平均采样;万用表;串口调试助手。
为测试实验电路板的性能,使用示波器对电路板中关键器件的时域变化波形进行测量,示波器可以提供器件工作时的电压电流波形变化趋势;使用万用表对器件两端的电压电流进行测量,万用表可以提供直观的电压电流数值。
为评估PID自整定算法在实现LED恒流工作上的效果,采用串口助手输出ADC采样得到的值,提供了明确的数值,通过相关公式计算可以得到评估结果。
3.1 电路损耗分析
电路中MOSFET和SBD的功率损耗会直接影响到电路的工作状态。因此,需要对这些器件的损耗进行分析。
MOSFET处于开关模式时的功率损耗可分为3部分:导通损耗、开关损耗和阻塞损耗[18]。通常,阻塞损耗可以忽略不计。在MOSFET导通过程中,MOSFET的导通损耗计算式[19]为
(5)
式中:Pcon,M为MOSFET的导通损耗;RDS(on)为开关导通时漏-源极电阻;ID,rms为MOSFET导通状态时漏极电流的均方根值。
MOSFET的开关损耗计算式[20]为
(6)
式中:Psw,M为MOSFET的开关损耗;VDS为漏-源极电压;ID为漏极电流;ton为MOSFET导通时间;toff为MOSFET截止时间;fsw为开关频率。
当SBD处于导通状态时,二极管呈现正向压降,导通损耗为[19]
Pcon,D=Vf×Iave
(7)
式中:Vf为导通时SBD的正向电压;Iave为通过SBD平均电流。
SBD的开关损耗计算式[20]为
(8)
式中:Qrr为反向恢复电荷;VDrr为反向恢复期间二极管两端的电压;Vfp为导通瞬间电压的正向压降;Ifp为导通瞬间的正向电流;tfr为正向恢复时间。
在LED额定电流操作下测量器件中的功率损耗,如表2所示。

表2 核心器件的功耗测量
结合表2的计算结果和上述的计算公式可知,BUCK电路核心器件的损耗主要取决于器件自身的导通阻值大小、正向和反向的恢复时间、正向和反向的电压电流值大小,以及PWM的频率。由于选择了上述特性值较小的开关器件和PWM控制信号,所以电路工作在额定状态时,器件的功耗较小。
3.2 系统时域响应分析
电流调节精准度的高低是能否实现LED精准调控的关键因素之一,所以LED光源调节控制系统需要实现对LED工作电流的精准调节。在LED调制过程中,照度与驱动电流之间存在一个非线性关系,这意味着即使电流略微变化,也会导致LED照度发生较大的变化。因此,为了确保LED光源的精准调节,必须保证驱动电路具有较高的电流调节精准度,否则,将会导致LED照度不稳定或出现不良的调控效果。
电流调节精准度的计算式为:
Ierr=Ia-It
(9)
(10)
(11)
式中:Ierr为LED实际工作电流与目标电流之间的误差;Ia为测得LED的实际工作电流;It为设定的LED目标工作电流;Imae为平均绝对误差电流;A为采样点的个数;φ为电流调节精准度。
3.2.1 稳态性能
对于已经设定的PID控制算法,利用串口助手输出电路中负载的电流工作情况。通过在控制系统中植入PID自整定算法、PID手动整定算法、无PID整定算法,比较了3种情况下对于LED的目标电流设置为额定电流300 mA时的稳态性能,验证了PID自整定算法的优越性。上位机内输入占空比为90%的PWM指令,将LED的目标工作电流稳定在300 mA,如图6所示。可以看出,无PID整定控制的LED电流虽然在0.5 s趋于稳定,但是未达到上位机发送的指令目标,这是由于无PID控制的反馈回路存在误差累积现象,累积的误差最终导致输出电流无法达到目标值;PID手动整定控制的LED电流在2.5 s趋于稳定,比无PID整定控制的稳定时间滞后了2 s,但是稳定后能达到指令目标;PID自整定控制的LED电流在2 s后趋于稳定,稳定时间比PID手动整定控制快0.5 s,同样在稳定后能达到指令目标。由于PID算法可以很好地消除累积误差,因此只要PID参数取得足够符合系统工作状态,控制系统就不会出现振荡,输出的电流值也都能稳定在设定值。

图6 LED工作在额定电流下3种效果曲线对比
经计算,采用PID自整定控制LED电流时,稳定后电流调节精准度可达到99.88%;采用PID手动整定控制LED电流时,稳定后电流调节精准度能达到96.00%。由此可见,无PID整定效果的LED电流虽然稳定时间较快,但是达不到指令目标值;PID自整定算法与PID手动整定算法相比,稳定时间加快了0.5 s,电流调节精准度提高了3.88个百分点。综合分析,PID自整定算法在LED恒流控制方面最优。
此外,上位机内输入阶梯信号指令,通过改变PWM占空比来改变LED的工作电流,并使用串口助手打印出LED的工作情况。通过在控制系统中植入PID自整定算法,观察PID自整定算法在阶梯控制信号下的性能。首先,上位机输入占空比为54%,将LED电流稳定在100 mA,然后占空比每隔5 s变化1次,依次变化为86%、90%、95%,将LED电流增大至200 mA、300 mA、400 mA,如图7所示。
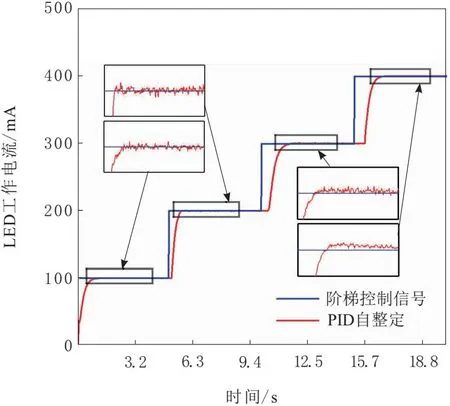
图7 阶梯控制信号下PID自整定效果曲线
经计算可知,占空比分别为54%、86%、90%、95%时,PID自整定控制对LED工作电流的调节精准度依次为99.87%、99.90%、99.88%、99.99%,均保持在99.87%及以上。由此可见,PID自整定算法对设计的电路而言具有较好的稳态性能。
3.2.2 动态性能
如图6所示,当设定的目标电流为300 mA时,PID手动整定控制的LED电流在上升阶段出现了明显超调现象,并且在进入稳定状态前发生多次振荡,这是由于手动整定PID参数时,KP、KI、KD无法用试凑的方式找到系统的最优值,尤其是KP的取值会直接影响系统的上升时间和超调量;无PID整定控制的LED电流虽然上升时间最短,但稳定输出时没有达到目标电流。然而,在PID自整定控制下的LED电流在稳定前的上升曲线未发生超调现象,上升时间也较快,稳定后也未产生振荡。这是由于PID自整定算法使用了带有时间延迟的一阶模型作为系统的假象传递函数,然后由实际的系统响应过程进行拟合,得到具体的系统传递函数,再通过Z-N法的经验公式找到系统最优的PID参数。因此,PID自整定算法能有效地找到系统最优的PID参数值,使系统具有较好的动态性能。
如图7所示,当上位机设定每隔5 s输出不同的占空比来改变LED的目标电流时,LED电流在阶梯控制信号下仍然未发生超调现象,目标电流改变的瞬间,LED两端电信号波形没有出现畸变、过冲和反压现象,跟随调节的稳定时间在1.2 s以内。这说明所设计的PID自整定算法在目标电流跟踪性能方面控制效果较好,且具有较好的抗扰动性能。
综上所述,本文提出的PWM控制结合PID自整定的方法来调节LED工作电流能够达到的精准度为99.87%,并且系统具有较好的稳态和动态性能。相较于手动PID整定,以及文献[9]、文献[10]和文献[11]分别提出的使用无PID整定、PWM输出芯片、PI控制器+电容滤波的方法来调节LED电流,本文方法具有明显优势,如表3所示。
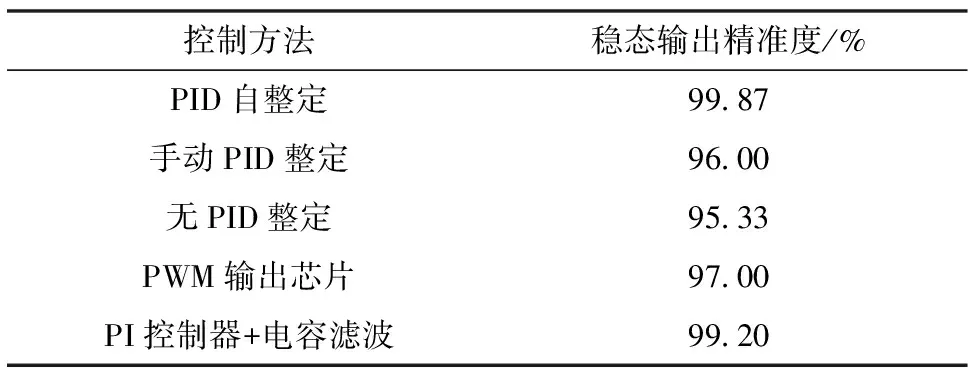
表3 不同控制方法下电路输出电流的精准度
4 结束语
当ALD工作时,雷达接收系统的接收准确度是影响ALD监测大气气溶胶效果的重要因素之一。为了校准ALD接收系统的接收准确度,本文提出一种基于BUCK恒流电路的LED光源调节控制技术。在对比现有LED调节控制技术的基础上,设计新的BUCK反馈控制回路,通过嵌入式系统输出不同的PWM波形,并结合PID自整定算法来调节控制LED的工作电流。实验表明,该电路中的核心器件MOSFET和SBD的功率损耗较小,均低于0.22 W;同时通过分析LED电流调节时的瞬态和稳态波形,验证了该控制电路在调节过程中未发生超调现象,电流调节精准度达到了99.87%,很大程度上避免了由于电流调节精准度低而引起的ALD接收系统接收到的光信号不精准的问题。接下来,可以从如何进一步减少电路的功率损耗和提高电路的工作效率等方面来优化校准系统,进而更好地为ALD的接收系统提供高效、精确的校准服务。