A Fractional-Order Ultra-Local Model-Based Adaptive Neural Network Sliding Mode Control of n-DOF Upper-Limb Exoskeleton With Input Deadzone
2024-03-04DingxinHeHaoPingWangYangTianandYidaGuo
Dingxin He , HaoPing Wang ,,, Yang Tian , and Yida Guo
Abstract—This paper proposes an adaptive neural network sliding mode control based on fractional-order ultra-local model for n-DOF upper-limb exoskeleton in presence of uncertainties,external disturbances and input deadzone.Considering the model complexity and input deadzone, a fractional-order ultra-local model is proposed to formulate the original dynamic system for simple controller design.Firstly, the control gain of ultra-local model is considered as a constant.The fractional-order sliding mode technique is designed to stabilize the closed-loop system,while fractional-order time-delay estimation is combined with neural network to estimate the lumped disturbance.Correspondingly, a fractional-order ultra-local model-based neural network sliding mode controller (FO-NNSMC) is proposed.Secondly, to avoid disadvantageous effect of improper gain selection on the control performance, the control gain of ultra-local model is considered as an unknown parameter.Then, the Nussbaum technique is introduced into the FO-NNSMC to deal with the stability problem with unknown gain.Correspondingly, a fractional-order ultra-local model-based adaptive neural network sliding mode controller (FO-ANNSMC) is proposed.Moreover, the stability analysis of the closed-loop system with the proposed method is presented by using the Lyapunov theory.Finally, with the co-simulations on virtual prototype of 7-DOF iReHave upper-limb exoskeleton and experiments on 2-DOF upper-limb exoskeleton,the obtained compared results illustrate the effectiveness and superiority of the proposed method.
I.INTRODUCTION
IN recent years, the exoskeleton robots are widely used in military and industrial fields, especially in the field of medical rehabilitation [1]-[4].Like many motion control systems,exoskeletons are affected by uncertainties such as nonlinearities, external disturbances and deadzone [5], [6].These nonlinearities, especially the deadzone, affect the steady-state precision and transient performance [7], [8].Thus, developing a strong robust method to improve the performance of exoskeleton systems is important.
In the past, research about handling the effect of deadzone on control system has attracted sufficient attention.One idea is to estimate the parameters of the deadzone by using some techniques, such as fuzzy logic [9] and adaptive estimation[10].Then, an exact deadzone inverse can be constructed to cancel the effect of the unmeasured deadzone input [11].Another way is to regard the deadzone as the unknown timevarying disturbance and then compensate for it [12].In [13],[14], the disturbance observer is integrated into control design to compensate for bounded disturbance including deadzone.Fuzzy logic is also employed to simultaneously approximate the unknown model knowledge and actuator deadzones online[15].Moreover, some researches disclose that iterative learning control [16] and prescribed performance control [7], [17]methodologies remain effective for systems with input deadzone without depending on the specific compensator.
In most studies, the neural network is an effective method to tackle the nonlinearity effect such as deadzone for motion control systems, such as helicopter [6], tank gun servo systems [18] and robotic manipulators [5], [8], [19], [20].The radial basis function (RBF) neural network is widely utilized in controller design due to its good generalization ability and simple structure [21].For example, in [22], an adaptive network control strategy is proposed to address the problem of output constraints and uncertainties.In [23], a continuous neural network based adaptive identifier is designed for nonlinear systems.And in [24], an adaptive neural control is designed for a kinematically redundant exoskeleton robot by using brain-machine interfaces.However, if only neural network is used to compensate for deadzone, a large number of neural nodes is often required to ensure good approximation which leads to a heavy computational burden.Once the estimation of neural network is inaccurate, the control performance will be reduced.
Due to the complex mechanical structure designed for human use and the interaction with human wearers, the control of exoskeleton presents additional complexity over the control of conventional robotic manipulators [25].To achieve the effective control for exoskeleton system, different control strategies have been proposed [26]-[28].Among them, a nonlinear modified computed torque control is developed for a whole arm wearable robotic exoskeleton which requires a good knowledge of dynamic parameters [26].Through using RBF network to estimate and compensate for the disturbances and dynamics errors, an adaptive backstepping sliding mode control is proposed for an upper-limb exoskeleton [27].Moreover, a sliding mode controller using nonlinear model-based switching functions is designed in [28] for a 7-DOF exoskeleton arm.Model-based switching functions provide the substantial control performance on the torque inputs.Nevertheless, these referred model-based control methods [26]-[28]require the knowledge of inertia, coriolis and centrifugal matrices, and gravitational force whose calculations rely on their model information.
In practical situation, due to the existence of friction nonlinearities from motor reducers and exoskeleton joints, unmodeled dynamics, and structural variations of model, the accurate exoskeleton model always cannot be obtained.To handle this problem, some compound controllers are designed by using observation/approximation techniques, such as timedelay estimation (TDE)-based adaptive control [29], fuzzy approximation-based adaptive backstepping control [30], disturbance estimation-based adaptive fuzzy control [31], and TDE-based computed torque control with robust adaptive RBF neural network compensator [32].Iterative learning control as a model-independent method is utilized to provide satisfactory control performance of exoskeleton and robot system [33]-[37].Besides, other approaches for fault detection and achievement of anti-disturbance control are developed[38]-[40].For instance, in [39], an adaptive dynamic programming-based data-driven controller is designed to provide high precision and strong robustness.In [40], a firefly algorithm-based optimal cascade control combined with proportional-integral-differential feedback is designed for parallel robot.
Moreover, ultra-local model-based control strategies are extensively studied [41]-[44].The ultra-local model means that a simple first or second order nonlinear model of the formy(v)=F+αuis used to approximate the original complex system in a short time sliding window, whereyanduare output and input signals, respectively,v=1 or 2 is the order,αis a non-physical constant parameter andFis a time-vary nonlinear function including unknown dynamics, uncertainties, disturbances, etc.[45].In [46], a model-free terminal sliding mode control is proposed for an exoskeleton-upper limb system.In [47], an extended state observer-based intelligent proportional-integral controller is designed for high pressure common rail injection system.In [48], considering the prescribed performance, a fixed time control approach is designed for wearable exoskeleton.Whereas, these referred model-free controllers [41]-[48] are all based on integralorder ultra-local model and use the artificially set fixed control gain.
To further enhance the performance of ultra-local modelbased control methods, model-free controllers with adaptive gain are proposed [49], [50].In [49], a least squares algorithm is utilized to update online estimation of parameterα.In [50],a tracking error-based gain variable law is constructed and a prescribed-time model-free controller is designed.However,the gain adaptive laws of these two methods are both designed based on tracking errors.This makes the performance improvement from adaptive gain limited as the tracking error is small.
The Nussbaum-type function is firstly proposed for parameter adaptive control in 1983 [51].Subsequently, this Nussbaum function was widely applied to address the issues of unknown control directions in complex systems [52]-[54].Moreover, in [55], a novel adaptive robust controller based on a Nussbaum function is designed for multi-input and multioutput (MIMO) mechanical systems with unknown actuator nonlinearities.In [56], a backstepping approach with a Nussbaum function is proposed to deal with the problem of input saturation in quadrotor system.Thus, due to its strong adaptability to unknown control coefficients, the Nussbaum technique is employed in this paper to make control gain adaptive.
Based on the above-mentioned discussion, in this paper, a fractional-order ultra-local model-based adaptive neural network sliding mode control is developed for ann-DOF upperlimb exoskeleton in presence of uncertainties, external disturbances and input deadzone.To avoid the difficulty of obtaining accurate dynamics and simplify controller design, a novel fractional-order ultra-local model is constructed to formulate the complex original exoskeleton system.Then, the fractionalorder time-delay estimation and neural network techniques are combined to eliminate the effect caused by the lumped disturbance including deadzone.To solve the difficulty of setting the control gain constant, the Nussbaum function is adopted to achieve gain adaptive and further improve control performance.Compared with existing works, the main contributions of this paper include the following.
1) Differently from the previous integer-order ultra-local model-based model-free control [41]-[48], this paper proposes a novel fractional-order ultra-local model to formulate the original complex system and complete controller design.This is a new model-free control framework that uses the controller design approach of fractional-order system to achieve control of an integer-order system.To the authors’ knowledge,no other researcher has proposed this idea.Although the controller designed in [41] is called model-free fractional-order sliding mode control, it is still developed based on integerorder ultra-local model and just constructs a fractional-order sliding mode to compensate for the disturbance.The developed method in this paper only relies on input/output data and provides better trajectory tracking performance, which can be illustrated by the co-simulation and experiment results.
2) Differently from controllers those only use neural networks to handle unknown nonlinearities [5], [6], [19]-[22], in this paper, the time-delay estimation is combined with neural network technique to compensate for the lumped disturbance containing deadzone.Due to the fast characteristics of time delay technology and compensation of neural network, the nonlinearities and disturbances can be eliminated more quickly and well.
3) Compared to fixed gain model-free control methods[41]-[48], this paper introduces the Nussbaum technique into controller design to make control gain adaptive.This avoids problem of control performance reduction due to inappropriate selection of gain parameters in fixed gain model-free approaches.
4) The stability of closed-loop system with the proposed control method is presented by using the Lyapunov theorem.Moreover, co-simulations on virtual prototype of a 7-DOF iReHave upper-limb exoskeleton and experiments on a 2-DOF upper-limb exoskeleton are realized to verify the effectiveness and superiority of the proposed control approach.
The rest of this paper is organized as follows.The problem formulation and preliminaries are presented in Section II.The fractional-order ultra-local model-based adaptive neural network sliding mode controller design is presented in Section III.In Section IV, co-simulation results are obtained.Section V gives the experiment results.Finally, conclusions are provided in Section VI.
II.PROBLEM FORMULATION AND PRELIMINARIES
A. Problem Formulation
Considering ann-DOF upper-limb exoskeleton with uncertainties, external disturbances and input deadzone, the dynamics of the system can be described as
whereq∈Rn,q˙ ∈Rnandq¨ ∈Rnare the vectors of position,velocity and acceleration of the joints of then-DOF upperlimb exoskeleton, respectively.M(q)∈Rn×nis the symmetric positive definite inertia matrix,C(q,q˙)∈Rn×nis the coriolis and centrifugal matrix,G(q)∈Rndenotes the gravitational force vector,fu(q,q˙)∈Rnis the vector of uncertainties which contain the friction from motor reducers and exoskeleton joints, unmodeled dynamics, and structural variations of model,fd∈Rnis the vector of external disturbances including the interaction forces between human limbs and exoskeleton and sudden external force caused by collision,DZ(τ) is the deadzone function and τ ∈Rnis the vector of control torque.
The problem of input deadzone widely exists in practical actuator like motor, which may fail to start when the calculated control torque does not exceed the deadzone bounds.The deadzone characteristic can be expressed as [16]
wheremri>0 andmli>0 denote the slopes of the deadzone,bri≥0 andbli≤0 affect the length of the deadzone.
From (1), it can be seen that then-DOF upper-limb exoskeleton is a highly coupled nonlinear system with unknown parameters.To avoid the complexity of parameter identification and reduce the difficulty of controller design, a fractional-order ultra-local model is proposed to approximate the each subsystem of (1) in a short time sliding window as
follows:
where Dγiqidenotes the γi-order derivative ofqiwith 1 <γi<2.Fiis the continuously updated lumped disturbance which does not distinguish among the system nonlinearities,unknown dynamics, external disturbances and deadzone nonlinearity.AndFican be estimated based on control input τiandsystemoutputqi.The αiisaparametertomake αiτiand Dγiqibe ofthesamemagnitude.Itshouldbetherefore clear that its numerical value, which is obtained by trials and errors,is not a priori precisely defined.
B. Preliminaries
Definition 1[57]: Fractional-order calculus plays an important role in modern science which means the orders of integral and derivative are fractions rather than integers.Due to its complete theoretical research, Riemann-Liouville (RL) fractional-order calculus is widely used whose definitions of fractional-order integral and derivative are as follows:
wherez∈C and ℜ (z)>0.
Property 1[57]: Since fractional-order calculus is linear,for any constantsaandb, it yields
Property 2[57]: Forn¯ ∈N, there exists
Lemma 1[58]: Caputo calculus is another definition of the fractional-order integral and derivative.The definition of Caputo fractional-order integral is the same as that of RL fractional-order integral and the Caputo fractional-order derivative is defined as
Definition 2[58]: Similarly to the exponential function frequently used in the solutions of integer-order systems, the Mittag-Leffler function with two parameters that is used in the solutions of fractional-order systems is defined as
C. RBF Neural Network
RBF neural networks (RBFNNs) are usually employed to approximate the unknown nonlinearities due to their good approximation ability in control engineering [6].The RBFNN is considered as a two-layer network whose structure is shown in Fig.1.The hidden layer performs a nonlinear transformation which maps the input into a new space.Then, the output layer combines linearly the output in the latter space.Thus,the continuous functionf(X):Rp→R can be approximated by an RBFNN as follow:

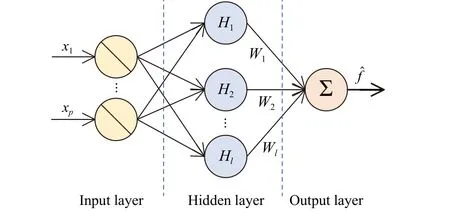
Fig.1.The structure of RBFNN.

III.CONTROL DESIGN AND STABILITY ANALYSIS
A fractional-order ultra-local model (3) has been proposed to re-formulate the complexn-DOF upper-limb exoskeleton system (1).Firstly, the αiis regarded as a constant parameter.To stabilize the closed-loop system, a fractional-order sliding mode strategy is designed.Besides, to eliminate the unknown lumped disturbance, fractional-order time-delay estimation(FOTDE), as well as RBFNN technologies, are adopted.Correspondingly, the fractional-order ultra-local model-based neural network sliding mode control (FO-NNSMC) is proposed, and the stability analysis is given.Secondly, to avoid the negative effect of inappropriate αiparameter selection on the control performance, the αiis further considered as an unknown time-varying parameter.Then, the Nussbaum technique is utilized to address the control problem of unknown gain.Correspondingly, combining with design process of FONNSMC, the fractional-order ultra-local model-based adaptive neural network sliding mode control (FO-ANNSMC) is proposed whose structure is shown in Fig.2, and the stability analysis is presented.
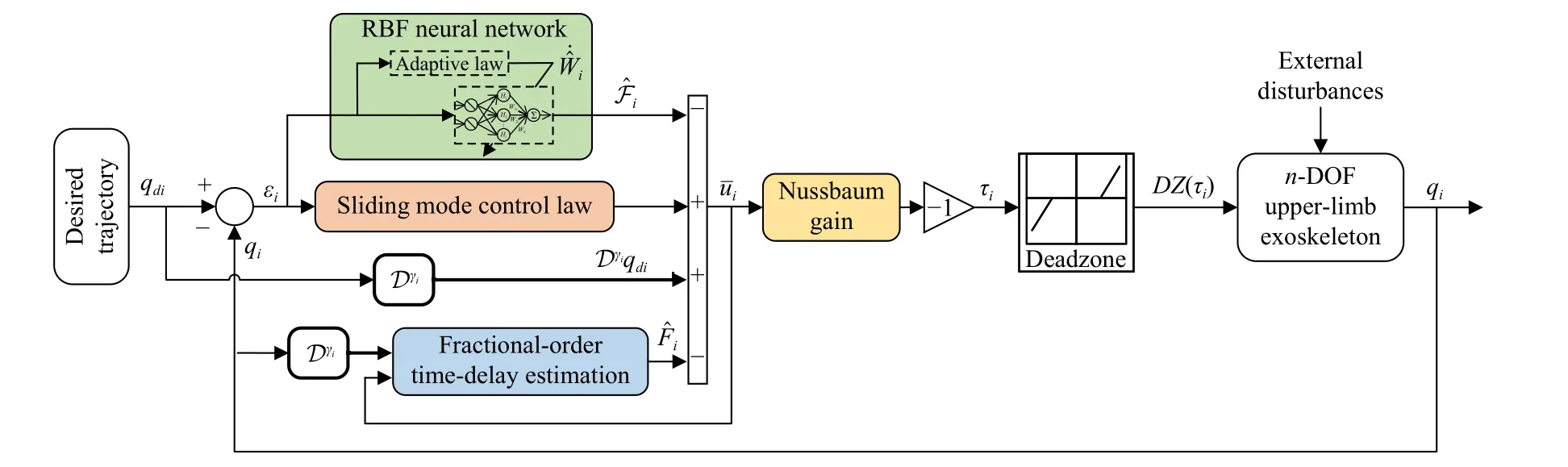
Fig.2.The structure diagram of the designed FO-ANNSMC method.
A. FO-NNSMC Design
According to the definition of fractional-order ultra-local model (3), one can get its error equation as follows:
where εi=qdi-qiis the tracking error and Dγiqdidenotes the γi-order derivative of desired signalqdi.Using Property 2,(19) can be rewritten as
withe1i=εiande2i=Dγi-1εi.Sliding mode control, also called variable structure control, is a nonlinear control method.It allows the system state to move along the predefined sliding surface, which guarantees the control system has the advantage of fast response and insensitivity to disturbances.Thus, in this paper, a sliding surface with fractionalorder state variable is designed as follow:
whereciis a positive parameter.Taking the time derivative ofSi, one has
In this part, the αiin (3) is regarded as an adjustable known constant parameter.To stabilizeSi, one can give the following fractional-order sliding mode control law:
wherekiand ηiare two positive parameters.However, theFiin (23) is an unknown nonlinear function, thus it is necessary to estimate it.According to the time-delay estimation method[44], from (3), the FOTDE is designed to estimateFias follow:
whereFˆiis the estimation ofFi,his a positive parameter which represents the time delay.The smaller ofh, the higher the estimation precision.Usually, the selection ofhis according to the digital computing processor.Nevertheless, from (3),it yields
Comparing (24) and (25), there always exists some estimation error and one defines estimation error Fi=Fi-Fˆi.
To further eliminate this estimation error Fi, the RBFNN compensator is designed by using input-output relationship.Based on (16) and (17), the RBFNN compensator is designed as follow:
where Fˆiis the estimation of Fi, andzi=[e1i,e2i]Tis the network input data.Correspondingly, the RBF neural network approximation law is designed by the Lyapunov stability analysis as follow:
whereWˆiis the vector which approximates the ideal weight, and ξiis a positive parameter which influences the adapting speed.
Finally, the complete FO-NNSMC law can be obtained as
withSi=cie1i+e2i.
Theorem 1: Considering then-DOF upper-limb exoskeleton system (1) with uncertainties, external disturbances and input deadzone, with the designed FO-NNSMC law (28)-(30)and bounded initial conditions, if the parameters satisfy 1 <γi<2, ηi≥Ψi, αi>0,ci>0,ki>0 , ξi>0 withi=1,2,...,n, the following conclusions can be obtained.
1) The closed-loop system is stable and the sliding surfaceSican converge to zero.
2) After reaching the sliding surface, i.e.,Si(t)=0, ∀t≥t1,the tracking error εican converge to zero along the sliding surface
B. FO-ANNSMC Design
Reviewing the dynamics ofn-DOF upper-limb exoskeleton in (1), the input gain is influenced byM(q) and deadzone characteristic.If the artificially set parameter αiis too small relative to real system gain, the lumped disturbanceFiwill include too many input torque which places greater demands on the performance of the estimator, otherwise, the closedloop system will be unstable.If the αiis too big relative to real system gain, the provided control law will become small which leads to a decrease in control precision.To address the difficult issue of tuning αi, the value of αiin (3) is regarded as an unknown time-varying parameter and the Nussbaum technique is adopted to adapt the control gain.
From (22), assumingu¯i=αiτi, to stabilizeSi, one gets
Later, using the Nussbaum technology, one gets the below adaptive control law:
where λiis a positive parameter.
Similarly, one first utilizes the FOTDE to estimate the lumped disturbanceFi.Due to the assumption ofu¯i=αiτi,according to (3), one gets the FOTDE law as follow:
Nevertheless, there always exists an estimation error Fi=Fi-Fˆicaused by time delay and estimation of gain αi.Then, to compensate for the estimation error Fi, the RBFNN approximation law is designed as

IV.CO-SIMULATION RESULTS
In this section, to verify the proposed strategy, a co-similation on virtual prototype of 7-DOF iReHave upper-limb exoskeleton which can be seen in Fig.3 is realized by using SolidWorks, SimMechanics and MATLAB/Simulink.To demonstrate the effectiveness and superiority of the proposed method, the comparisons to fractional-order ultra-local modelbased sliding mode controller (FO-SMC) and FO-NNSMC are implemented firstly in case 1.Then in case 2, to further validate the performance of the proposed FO-ANNSMC, the comparisons to neural proportion-integral-differential (PID) [61],time-delay estimation-based intelligent proportion-differential(TDE-iPD) [44] and model-free prescribed performance fixedtime control (MFPPFTC) [48] are implemented.In Case 3, the co-simulation under hard deadzone is done to further verify the effectiveness of FO-ANNSMC.

Fig.3.Virtual prototype of 7-DOF iReHave upper-limb exoskeleton.
The virtual prototype of 7-DOF iReHave upper limb exoskeleton has been realized in our previous work [49].Then, the rehabilitation training is selected as a daily activity of eating.The initial angular positions and velocities of seven joints are all zero.The desired joint angular positions of eating action which are planned on the 5th-order polynomial function can be defined as follows [49]:
A. Case 1: Trajectory Tracking Compared With FO-SMC and FO-NNSMC Methods
withSi=cie1i+e2i.Compared with FO-NNSMC, the FOSMC implies only using time delay estimation to eliminate the lumped disturbance without neural network compensation.The time delays in three controllers are the same and set ash=0.001.Besides, the low-pass filter is often added for time delay estimation to avoid the potential chattering.For the continuous control signal, sgn(·) in (28), (37) and (82) is replaced by tanh(·) in controller application.To achieve the trajectory tracking for 7-DOF iReHave upper-limb exoskeleton, the FOSMC parameters are given in Table I.

TABLE I PARAMETERS OF FO-SMC METHOD IN CASE 1

After that, their corresponding co-simulation results of trajectory tracking, tracking error, control torque and deadzone output torque with three controllers are shown in Figs.4 and 5, the Nussbaum adaptive gain results with FO-ANNSMC are shown in Fig.6, the 2-norms of neural network weight results of FO-NNSMC and FO-ANNSMC are shown in Fig.7.To quantitatively characterize the control performance, the performance indexes of integral of the time multiplied by the absolute error (ITAE) [63] are employed.Compared to the integral of the square error (ISE) and the integral of the absolute error (IAE), the ITAE considers both the convergence speed and tracking error.The smaller ITAE index means less overshoot, faster convergence and stronger robustness of the control system [64].The ITAE index is defined as
where ε(t) is the tracking error, andTis the terminal time.Then, the ITAE indexes of three controllers are shown in Table II.
From the left seven images in Fig.4, three controllers all achieve trajectory tracking under the presence of model uncertainties, external disturbances and input deadzone.From the right seven images in Fig.4 and Table II, one can see that the tracking performance of FO-NNSMC is better than that of FO-SMC.This implies that the addition of neural network enhances the ability to compensate for the lumped disturbance including input deadzone, resulting in improved control performance.Moreover, the tracking error of FOANNSMC is less than that of FO-NNSMC, which demonstrates that the Nussbaum function further improves the tracking precision.From Table II, the ITAE performance index of FO-ANNSMC is the smallest among three controllers.Hence,FO-ANNSMC provides the better control performance than FO-NNSMC and FO-SMC.Besides, the difficulty ofαparameter selection is avoided by using Nussbaum adaptive technique.
From Fig.5, the control torques of three controllers are all acceptable.Fig.6 shows the Nussbaum gain will automatically update and eventually stabilize around a value.It is necessary to mention that the real input gain of the system and-N(βi)have the same signs.From Fig.7, one can see the neural weights of FO-NNSMC and FO-ANNSMC methods can approximate the ideal weight values.
B. Case 2: Trajectory Tracking Compared With Neural PID,TDE-iPD and MFPPFTC Methods
In this case, the external disturbancesfdand unknown deadzone are defined as the same as those of Case 1.
The neural PID control law which is a natural combination of linear PID and neural network compensation is defined as follows [61]:
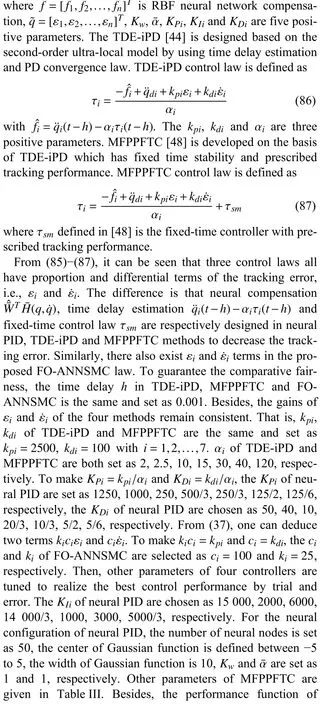
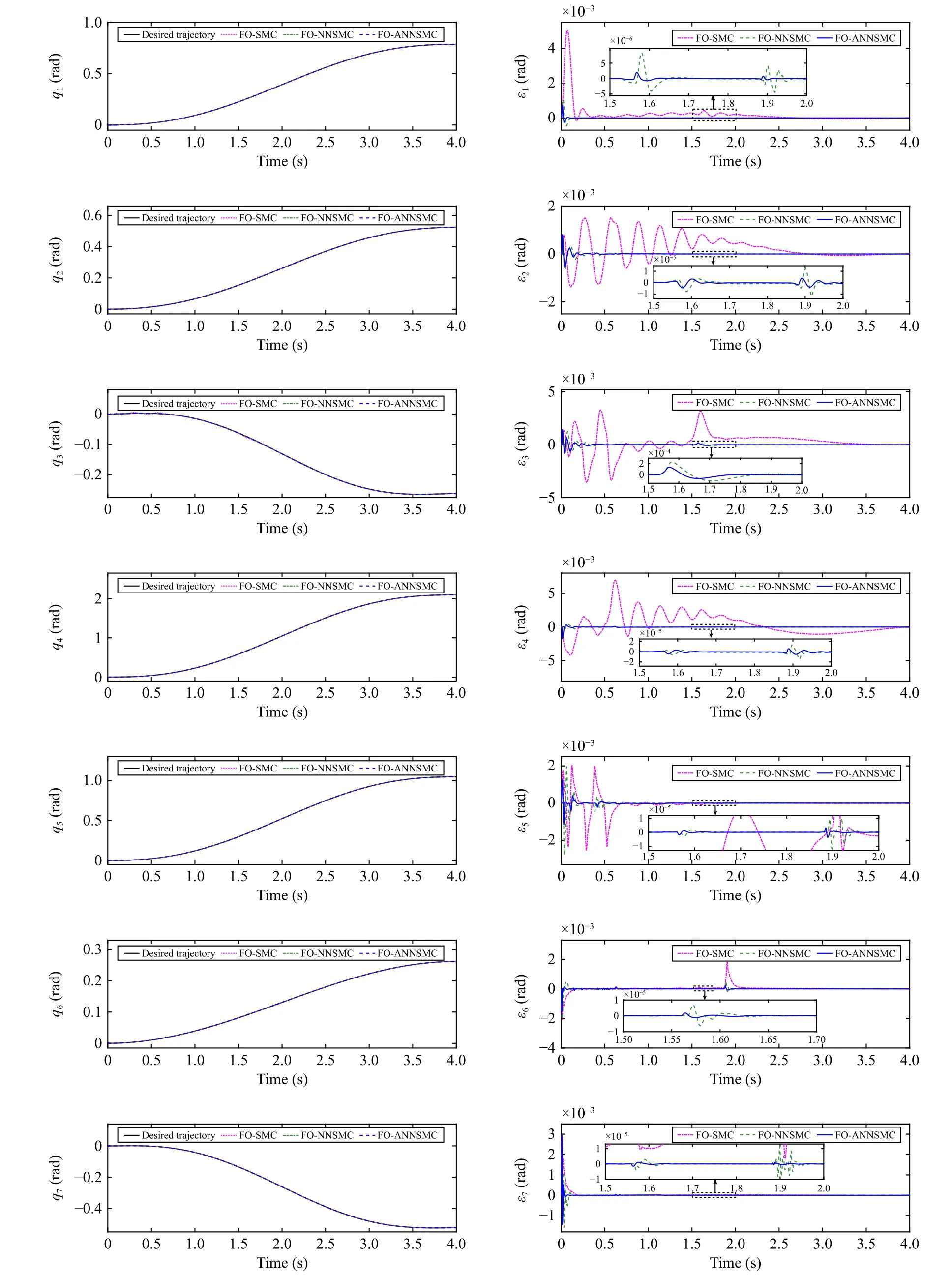
Fig.4.Trajectory tracking qi and tracking error εi of seven joints with FO-SMC, FO-NNSMC and FO-ANNSMC methods in Case 1.
MFPPFTC is selected as Ωb=0.1exp(-10t)+0.01.Other parameters and neural configuration of FO-ANNSMC are the same as those of Case 1.After that, the corresponding co-simulation results of trajectory tracking, tracking error, control torque and deadzone output torque with four controllers are shown in Figs.8 and 9, and the performance indexes of ITAE with four controllers are calculated in Table IV.

Fig.5.Control torque τi and deadzone output torque D Z(τi) of seven joints with FO-SMC, FO-NNSMC and FO-ANNSMC methods in Case 1.
From the left seven images in Fig.8, four controllers all achieve trajectory tracking under the presence of model uncertainties, external disturbances and input deadzone.The right seven images in Fig.8 show that the tracking errors of FOANNSMC are smaller than those of neural PID, TDE-iPD and MFPPFTC.Furthermore, it can be clearly seen that there exists obvious deadzone phenomenon at around 1.57 s of joint-3, 0.59 s of joint-4, 0.4 s of joint-5, 1.88 s of joint-6, at these times, the tracking error of FO-ANNSMC is the smallest among four controllers.This indicates that FO-ANNSMC can effectively eliminate the effect of deadzone on trajectory tracking.Moreover, from Table IV, the comparison of ITAE performance index demonstrates the control performance of FO-ANNSMC is the best.From Fig.9, the control torques of four controllers are all acceptable.
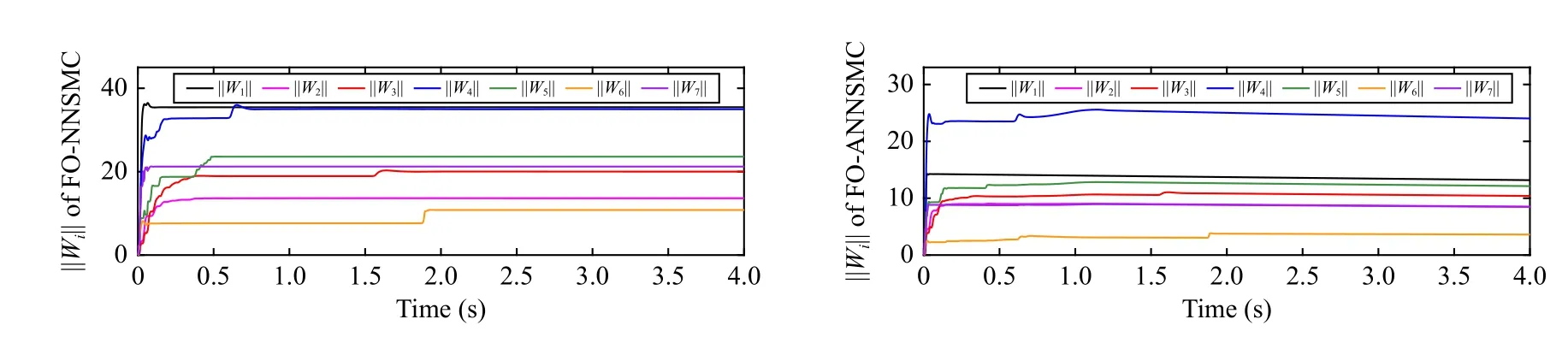
Fig.7.The 2-norm of RBFNN weight ‖ Wi‖ of seven joints with FO-NNSMC and FO-ANNSMC methods in Case 1.
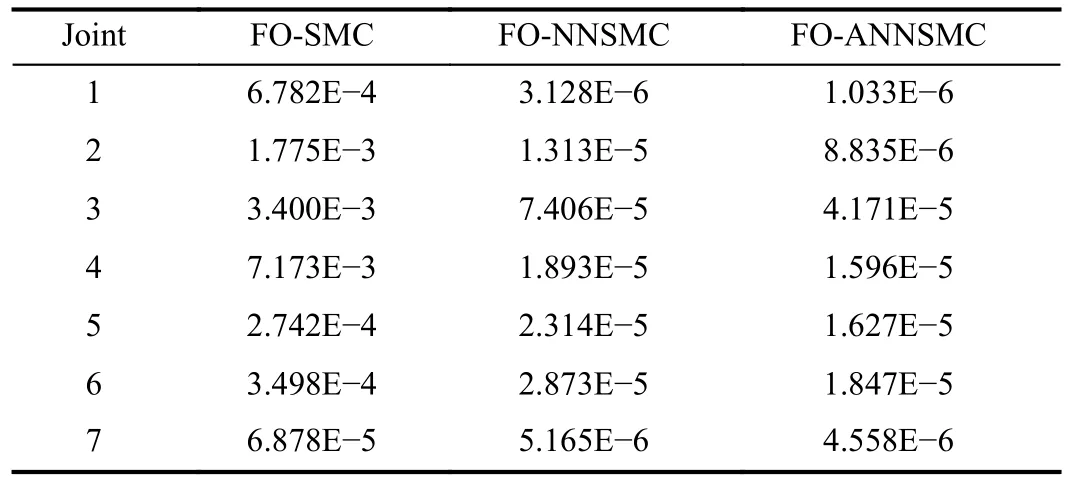
TABLE II THE ITAE PERFORMANCE INDEX OF FO-SMC,FO-NNSMC AND FO-ANNSMC IN CASE 1
oped based on fractional-order ultra-local model and uses time-delay estimation, RBF neural network and Nussbaum technique to improve tracking precision.According to simulation results, compared to neural PID, the FO-ANNSMC has faster convergence speed, almost zero steady-state error andstronger robustness to deadzone phenomenon.
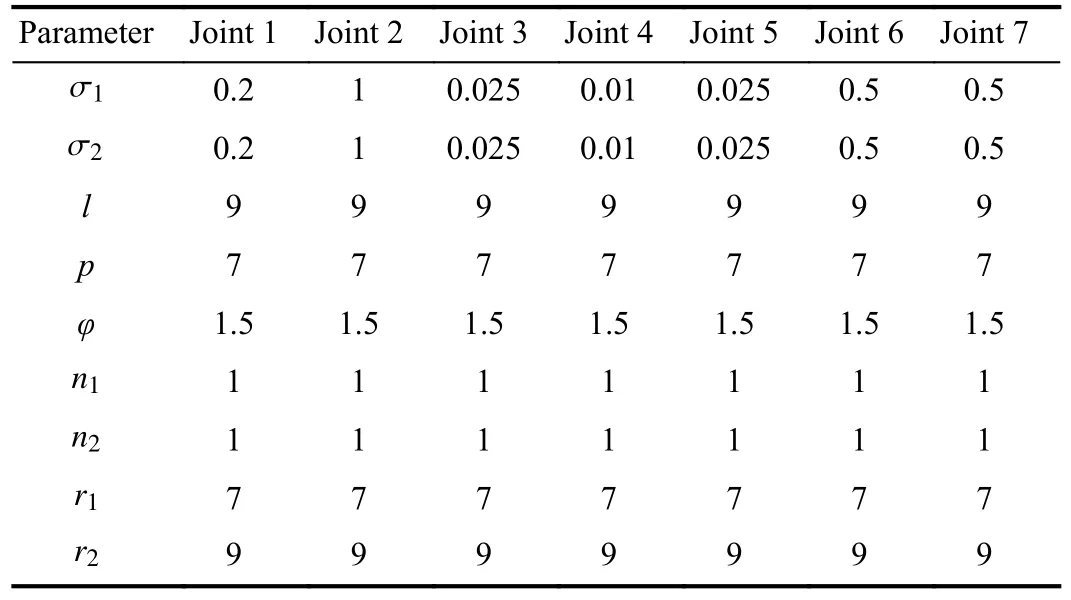
TABLE III PARAMETERS OF MFPPFTC METHOD IN CASE 2

Fig.8.Trajectory tracking qi and tracking error εi of seven joints with neural PID, TDE-iPD, MFPPFTC and FO-ANNSMC methods in Case 2.
Remark 4: The neural PID, TDE-iPD, MFPPFTC and the proposed FO-ANNSMC are all constructed for each joint subsystem.The linear PID module of neural PID is proven simple that requires little computational effort (O(1)).The neural module of neural PID is a 1 4×50×7 network.TDE-iPD is a simple method that has little computational burden (O(1)).For MFPPFTC, there are many scalar calculations but not matrix computation (O(1)).For FO-ANNSMC, except for the neural network component, the remainder are scalar calculations(O(1)).For the modern digital computing processor, the addition of a finite number of scalar calculations does not add to the computational burden, that is, it does not slow down the computation.From Fig.1, it can be seen that the computational complexity of an RBFNN is (O(p×l+l)).When the number of network inputspand the number of neural nodes are huge, the calculations will become very complicated Whereas, in the simulation,p=2 andl=50 are selectedl.which are not large.Thus, compared to neural PID, TDE-iPD and MFPPFTC, the FO-ANNSMC does not add much computational complexity for the improvement of performance.
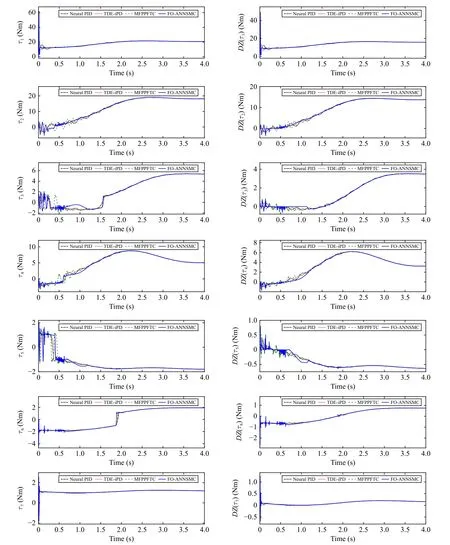
Fig.9.Control torque τi and deadzone output torque D Z(τi) of seven joints with neural PID, TDE-iPD, MFPPFTC and FO-ANNSMC methods in Case 2.
C. Case 3: Trajectory Tracking Under Hard Deadzone
To better approximate the real physical deadzone phenomenon in the permanent magnet direct current (DC) motors,a hard deadzone model is proposed [65].In this case, the tracking co-simulation with FO-ANNSMC under hard deadzone will be done.
The hard deadzone model is established as follow [65]:
Compared the deadzone model (2), hard deadzone model
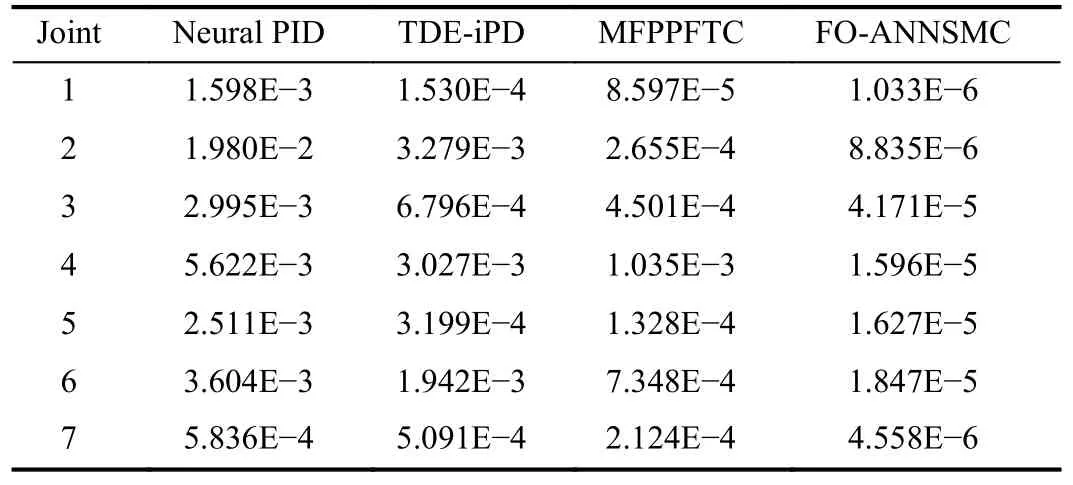
TABLE IV THE ITAE PERFORMANCE INDEX OF NEURAL PID, TDE-IPD,MFPPFTC AND FO-ANNSMC IN CASE 2

From Fig.10, one can see that even under hard deadzone,the proposed FO-ANNSMC can still realize the trajectory tracking and has high tracking precision.The left seven images in Fig.11 show the control torques and hard deadzone output torques.Due to that the torques in Joints 5-7 are small and between -2 to 2, the sudden offset which is set as 0.5 makes the torques of Joints 5-7 have more chattering.The right seven figures in Fig.11 demonstrate the change curve of Nussbaum adaptive gain.From Fig.12, it can be observed the neural weights of FO-ANNSMC can approximate the ideal weight values.
V.EXPERIMENT RESULTS
A 2-DOF upper-limb exoskeleton is introduced based on dSPACE control box in the experimental part.There are two DC motors for the movement of shoulder joint flexion/extension and elbow joint flexion/extension.The motor type is Maxon EC 45, the required motor driver type is Maxon EPOS2, the 50:1 harmonic reducer type is HarmoicDrive CSFN-14-50-2XH-F, the force sensor type is the ChengYing HZC-HSWL, and the encoder is Maxon L256-1024.The loop frequency of the control loop is 1 KHz.The complete experimental platform is shown in Fig.13.For comparison, the state feedback-based adaptive neural network control (ANNC) [8]and the time-delay estimation based computed torque control with robust adaptive RBF neural network compensator (CTCTDE-RBF) [32] are implemented.
The aim of experiment is to make joint output track the desired trajectory:qd1=qd2=0.3(1-cos(0.5t)), and the ini-

From results, one can explore that three controllers can all track the desired trajectory successfully, whereas, the proposed method FO-ANNSMC provides the smallest tracking error and best control performance.Besides, Table V demonstrates that the ITAE index of FO-ANNSMC is the smallest.Moreover, the magnitude and change of control torque of FOANNSMC are also acceptable.In summary, we can conclude that the proposed control approach has effectiveness and superiority in dealing with trajectory tracking problems under deadzone.
VI.CONCLUSION
For then-DOF upper-limb exoskeleton with uncertainties,external disturbances and input deadzone, a novel adaptive neural network sliding mode control based on fractional-order ultra-local model is proposed.Due to the designs of FOTDE,RBFNN and Nussbaum gain, this method has the robustness to nonlinearities such as deadzone.From the co-simulation results of Case 1, the design of FOTDE, the addition of neural network and the introduction of Nussbaum gain make FOANNSMC have better tracking precision and avoid the difficulty of control gain tuning.From the co-simulation results of Case 2, the developed FO-ANNSMC method has less tracking error and stronger robustness to nonlinearities and deadzone.The co-simulation results of Case 3 show that even under hard deadzone, the proposed FO-ANNSMC is still effective and has small tracking errors.Moreover, experiment results verify the effectiveness and superiority of the designed method.
Compared to the existing model-free control based on integer-order ultra-local model, the proposed method not only has better control performance but also avoids the difficulty of control gain tuning.Whereas, input saturation may significantly reduce the performance of this paper’s controller.Therefore, we will improve the proposed method to deal with the input saturation in the future.

Fig.10.Trajectory tracking qi and tracking error εi of seven joints with FO-ANNSMC method under hard deadzone in Case 3.
APPENDIX
Proof of Theorem 1: 1) Consider the following Lyapunov function:
whereLirepresents the each joint’s Lyapunov function.Taking the (28) into (22), one has
According to the universal approximation property, from(18), it yields

Fig.11.Torque τi , D Z(τi) and Nussbaum adaptive gain N (βi) of seven joints with FO-ANNSMC method under hard deadzone in Case 3.

Fig.12.The 2-norm of RBFNN weight ‖Wi‖ of seven joints with FOANNSMC method under hard deadzone in Case 3.
From (29) and (91), one gets
Then, taking time derivative of Lyapunov function (89), one has

Fig.13.Experiment platform of 2-DOF upper-limb exoskeleton.
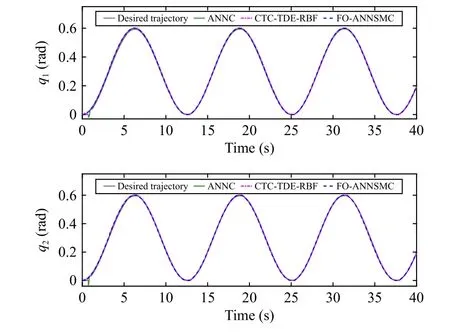
Fig.14.Trajectory tracking qi of two joints with ANNC, CTC-TDE-RBF and FO-ANNSMC in experiment.

Fig.15.Tracking errors qdi-qi of two joints with ANNC, CTC-TDE-RBF and FO-ANNSMC in experiment.
With (30), one can further compute
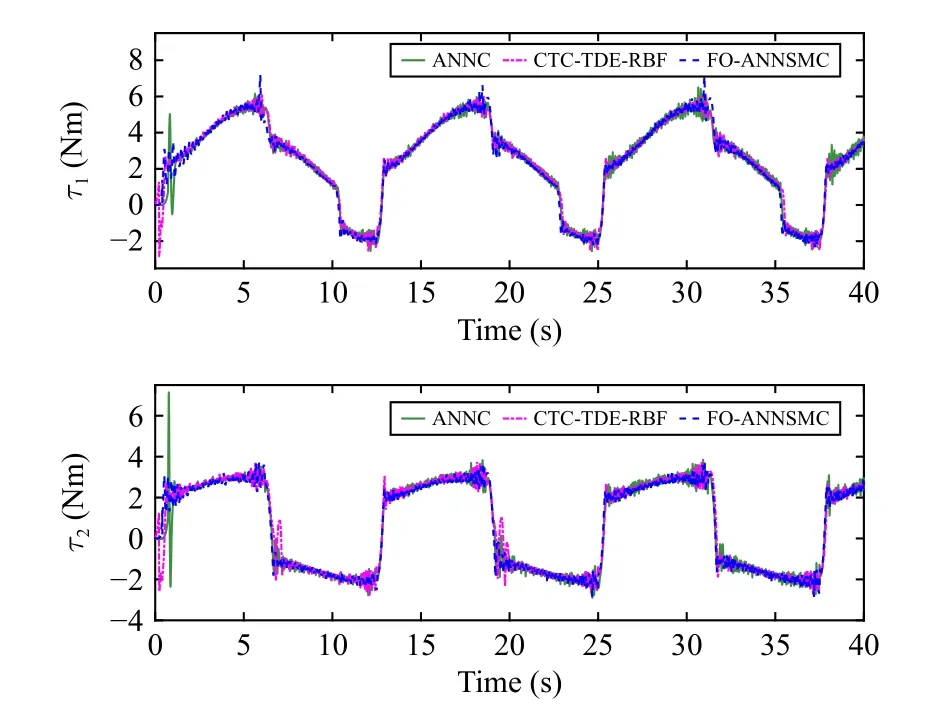
Fig.16.Control torques τi of two joints with ANNC, CTC-TDE-RBF and FO-ANNSMC in experiment.
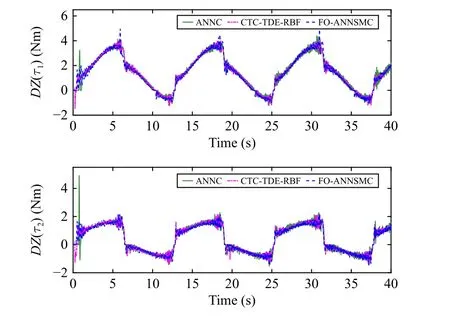
Fig.17.Deadzone outputs DZ(τi) of two joints with ANNC, CTC-TDERBF and FO-ANNSMC in experiment.

TABLE V THE ITAE PERFORMANCE INDEX OF ANNC, CTC-TDE-RBF AND FO-ANNSMC IN EXPERIMENT

Fig.18.Nussbaum adaptive gain N(βi) of two joints with FO-ANNSMC method in experiment.
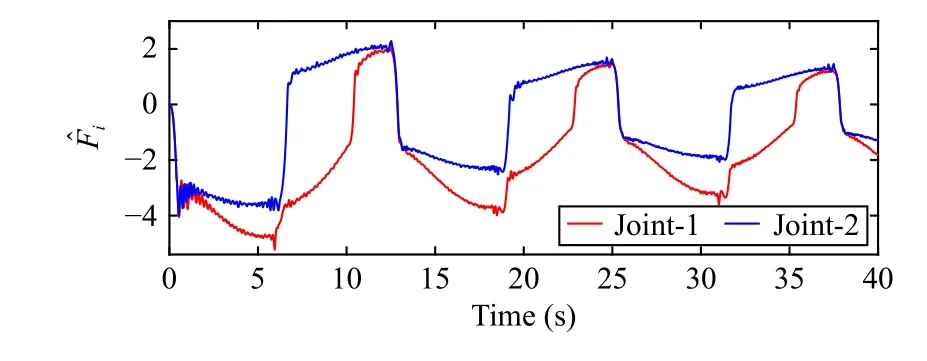
Fig.19.The estimation Fˆi of two joints with FO-ANNSMC method in experiment.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- A Dual Closed-Loop Digital Twin Construction Method for Optimizing the Copper Disc Casting Process
- Adaptive Optimal Output Regulation of Interconnected Singularly Perturbed Systems With Application to Power Systems
- Sequential Inverse Optimal Control of Discrete-Time Systems
- More Than Lightening: A Self-Supervised Low-Light Image Enhancement Method Capable for Multiple Degradations
- Set-Membership Filtering Approach to Dynamic Event-Triggered Fault Estimation for a Class of Nonlinear Time-Varying Complex Networks
- Dynamic Event-Triggered Consensus Control for Input Constrained Multi-Agent Systems With a Designable Minimum Inter-Event Time