Distributed Economic MPC for Synergetic Regulation of the Voltage of an Island DC Micro-Grid
2024-03-04YiZhengYanyeWangXunMengShaoyuanLiSeniorandHaoChenSenior
Yi Zheng ,,, Yanye Wang , Xun Meng , Shaoyuan Li , Senior,, and Hao Chen , Senior,
Abstract—In this paper, distributed model predictive control(DMPC) for island DC micro-grids (MG) with wind/photovoltaic(PV)/battery power is proposed, which coordinates all distributed generations (DG) to stabilize the bus voltage together with the insurance of having computational efficiency under a real-time requirement.Based on the feedback of the bus voltage, the deviation of the current is dispatched to each DG according to cost over the prediction horizon.Moreover, to avoid the excessive fluctuation of the battery power, both the discharge-charge switching times and costs are considered in the model predictive control (MPC) optimization problems.A Lyapunov constraint with a time-varying steady-state is designed in each local MPC to guarantee the stabilization of the entire system.The voltage stabilization of the MG is achieved by this strategy with the cooperation of DGs.The numeric results of applying the proposed method to a MG of the Shanghai Power Supply Company shows the effectiveness of the distributed economic MPC.
I.INTRODUCTION
WITH the increasing problems of environmental pollution and resource limitations, energy security should be regarded as a sustainability threat [1].Hence the significance of renewable energy sources (RES) is growing rapidly, among which research involving solar and wind energy has received widespread attention in recent years because they are widely available and eco-friendly.To improve the quality of power systems and enhance the energy efficiency, distributed generation (DG) technologies and the concept of micro-grids (MG)are highly valued [2].
MG can be regarded as a distributed system including various power generation and energy storage systems, which plays an important role in creating sustainable growth.MGs provide an efficient solution for integrating distributed generations, especially for RESs that fluctuate greatly under the influence of the external environment and may deteriorate the quality of power supply [3], [4].MGs can operate in two modes: a Grid-connected mode or Island mode.In the Gridconnected mode, MGs can solve the problem of incorporating DGs into the grid while ensuring power supply quality [5].In Island mode, MG can maximize the usage of DGs and minimize operating costs, which are widely used in remote areas[6].In this paper, an island DC MG with a wind/photovoltaic(PV)/battery is considered.Generally, an island MG always faces reliability risks due to the continuous changes in RESs and load demand [7].Thus, it is essential to design a scheme that ensures the stability and operation quality of the system.
Generally, the control of MGs can be divided into three layers where the upper layer deals with the optimal dispatch of the power in MGs, which can be seen as an energy management system (EMS); the secondary control layer is meant to reduce steady-state voltage errors caused by the operation of the primary control [8], [9], and the primary control layer maintains the stability of the MGs in a decentralized structure with the application of droop control [10].To improve the performance of MGs, some methods have appeared in literature [11]-[13].In the secondary control layer, Longet al.[8],[9], [14], [15] proposed a distributed model predictive control(DMPC) to coordinate the DGs.Longet al.[8] presented a method that regulates the voltage of DC MG with a virtual inertia approach in the secondary control layer which provides inertia support during the transient state and enhances the dynamic characteristics of the DC-link voltage.In [16],each local DG’s controller collects data from all DGs and generates control law for primary level control by an averaging technique for compensation of voltage unbalances.Shivam and Dahiya [11] presented a distributed control scheme based on the averaging technique, voltage droop control, and hysteresis current control.However, the secondary control mentioned above does not consider the dynamics of the DGs, and neither the secondary control nor the primary control considers short-term economic performance.Shanet al.[4] gave the scheme to control the voltage in MGs using energy storage systems.Also, short-term economic performance is not considered, and the control of the bus voltage is mainly dependent on storage, which decreases the flexibility and reliability of DC MG when the battery is at fault.Therefore, the control optimization of DC MG at the primary and secondary layers for obtaining a more reliable and efficient power supply can be a problem worth further studying.
Model predictive control (MPC) has been widely recognized as a practical method with good performance and capability to explicitly handle constraints [17]-[22].Among the MPC algorithms, DMPC, which calculates the manipulated inputs individually in a coordinated manner [21], [23]-[25], is naturally more suitable for the control of distributed power generation systems [26], [27].Many applications of MPC on the control of MGs appeared in [9], [27]-[31].For the energy management systems of MGs, Qiet al.[27] proposed a DMPC which considers the dynamics of each DG in the optimization problem.Reference [29] breaks the centralized dispatching problem of MG up into several nonlinear programming problems to realize the plug-and-play property.Rute-Luengoet al.[9] presented a DMPC system for secondary control of the on-connected hybrid AC-DC MG and Longet al.[8], [32] presented a DMPC system for secondary control for battery systems in DC MG, where the power-sharing and the voltage regulation are traded off.Also, some fast MPCs have been applied in the primary control layer.In [33],an MPC for energy storage converters is proposed such that all the hard constraints can be guaranteed in the primary control layer.Navaset al.[30] proposed an MPC-controlled virtual inertia approach for Batteries to enhance the dynamic characteristics of the DC-link voltage.For AC-MG, Guoet al.[15] proposed a DMPC that includes both the secondary and primary control.All these give good references and stimulate the study of the design of the distributed control of DC island MG under the framework of DMPC to obtain a reliable and efficient power supply.
In this paper, we focus on control of the voltage of DC MG.DMPC for the real-time dispatch of the DC MG is proposed,which judges the deviation of the power between the supply side and load side using real-time feed back of the bus voltage, and economically dispatches this power deviation to each subsystem.It integrates both the primary control and the secondary control and achieves a synergistic guarantee of power balance and bus voltage stability through the cooperation of DGs.The system can be reliable since it does not rely on just one DG.The long-term results from EMS are considered as references and a soft constraint is applied in the optimization control problem of the battery to keep the charging-discharging state consistent with that of long-term optimization results.Moreover, a Lyapunov constraint with time-varying setpoints is designed to guarantee the stability of the closed-loop system.
The advantages of the proposed DMPC of the island DC MG are listed as follows.
1) All DGs are used to adjust the bus voltage, ensuring the stability of the bus voltage even when some DGs are not functioning;
2) Both the short-term cost and the long-term cost are considered to ensure economic benefit;
3) The current is directly dispatched according to the feedback signals at the low layer.The DMPC takes over the secondary control layer and the primary control layer, which simplifies the control structure;
4) A Lyapunov constraint with a time-varying steady-state is designed for each local MPC, which guarantees the stabilization of the entire system when a deduced sufficient condition is satisfied.
Notations: ‖·‖ denotes the Euclidean norm of a vector.For a random variableX,E(X) denotes the expectation ofX.P[X≥x] denotes the probability forX≥x.A continuous function α:[0,a)→[0,∞) is said to belong to class K if it is strictly increasing and α (0)=0.
II.SYSTEM DESCRIPTION
The island DC MG studied in this paper is composed of wind generation, photovoltaic (PV) generation and batteries.Each DG is connected to the DC bus through the power electronic converters.
A. Modeling
1)Wind Generation: A direct-drive wind turbine is composed of a wind turbine, a permanent magnet synchronous generator (PMSG) and a DC-DC rectifier, as is shown in Fig.1.The state-space representation is described as follows:
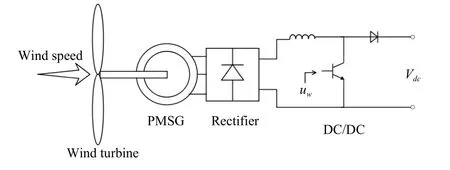
Fig.1.Structure of direct-drive wind turbine.
For simplicity, assume that the statordandqhave same inductanceL, then (1) can be expressed as
2)PV Generation: The equivalent circuit of a single PV cell
is shown in Fig.2(a).The output currentIof the PV cell is
whereIphis the photo-generated current andIscis the shortcircuit current under the corresponding conditions;T*is the reference temperature; λ*is the reference isolation;Ktis the temperature coefficient under for the short-circuit current;Idis the diode current;Ishis the leakage current of PV.Assuming that the PV array is composed ofNpPV panels in parallel while a PV panel is composed ofNsPV cells in series, then the output current of PV array becomes
whereA, 1<A<2,isconstantand isselectedaccordingto the characteristic of PV,K=1.38-23J/KistheBoltzmannconstant.
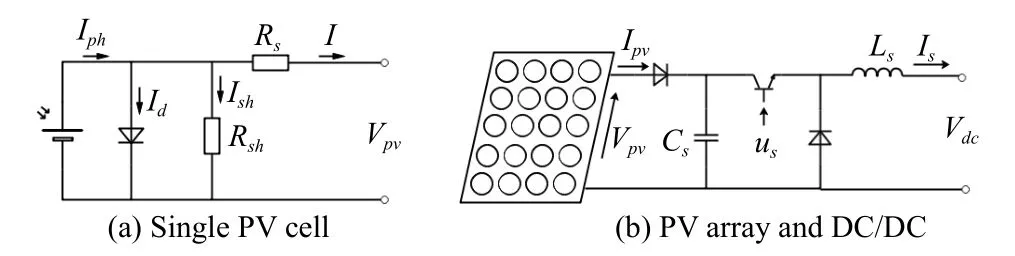
Fig.2.Equivalent circuit of PVs.
As shown in Fig.2(b), the PV array is connected to the DC bus by a DC/DC converter and the output of the PV generation unit is controlled by the duty cycleusof the converter.Then the model of PV power generation becomes
which can be simplified as
3)Energy Storage System: In this paper, the lead-acid battery is selected as an energy storage system.The equivalent circuit of the battery is shown in Fig.3, where the output voltage and current of the battery can be expressed as
Fig.3.Circuit of battery.
With consideration of the lifetime of the battery, the state of charge (SOC) should be maintained within a certain range.The following gives the calculation of SOC of the battery and its limitation:
whereQ0is the initial capacity of the battery andQmaxis the total capacity.The battery is connected to the DC bus through a bi-directional BUCK/BOOST converter and the modes are switched by controlling the signals ofs1,s2.
whereVBis calculated according to (7).Under the BUCK mode, the switchs1is off, ands2receivesubas the duty cycle,where we assume that δ=0; Under the BOOST mode, the switchs2is off,s1receivesubas the duty cycle, and δ =1.For simplification, (11) is expressed as
wherexb=[Ib Ic1]T;ubserves as the control input.The superscript 0, 1 on the mapping functionsf¯b,fbandgbare used to distinguish the two operating modes of the battery.
4)The Island DC MG: The topology of the considered island DC MG is shown in Fig.4, where all DGs are connected by a bus.
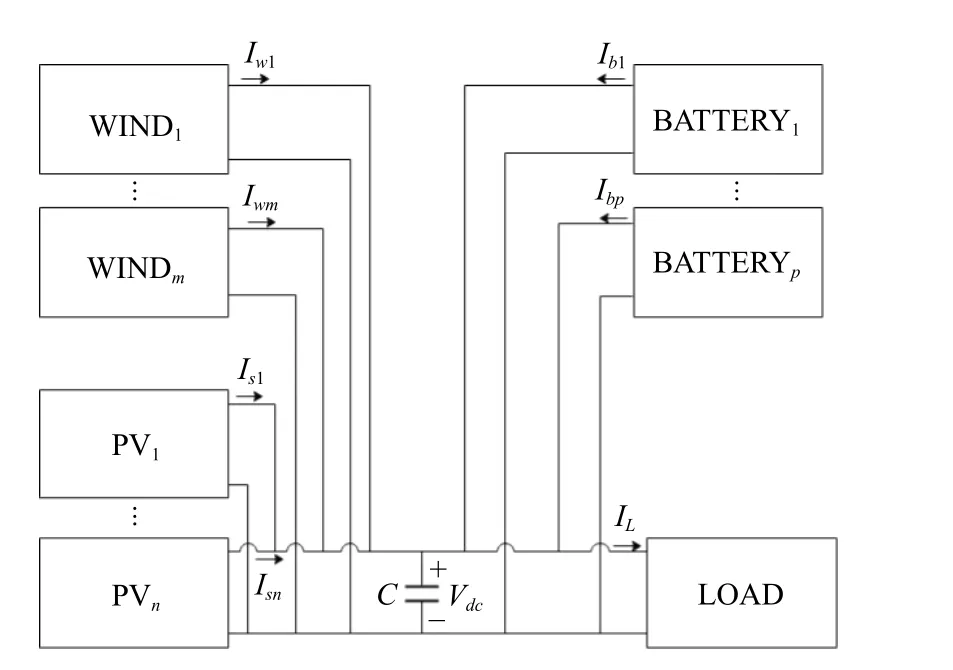
Fig.4.The topology of the considered DC MG.
B. Problem
The control tasks of an island DC MG include the economic sharing of power and the stabilizing of the bus voltage with high reliability.
The control structure can be divided into two layers with different operational time scales.Generally, the upper layer(EMS) optimizes the power dispatch and provides the lower layer with the basic power reference for a longer period.The fluctuations in RESs and load demands often lead to power imbalance, which results in instability of MG and deviation of the bus voltage.The lower layer operates with a shorter control period and compensates for the power mismatch according to the fluctuation of the bus voltage, which ensures realtime power balance and bus voltage stability.
In the lower layer, the existing methods first re-calculate the current setpoint of each DG according to the measured bus voltage; we then let the DG track this setpoint [11].The current set points are changed by a fixed ratio and only change the current of one battery according to the deviation of voltage [11].With these methods, the short-term economic performance is not considered sufficiently, and not all the DGs participate in the control of bus voltage which decreases the reliability of the MG control system.
This paper focuses on the control in the lower layer.A DMPC synergetic control scheme to achieve bus voltage stability is proposed, which uses all DGs to adjust the bus voltage and considers the short-term economic operation of the MG.Also, the bus voltage and the current of each DG are controlled together in a subsystem-based MPC where the dynamics of DGs are fully considered for performance improvement.
III.DISTRIBUTED MODEL PREDICTIVE CONTROL
To maintain the stabilization of bus voltage flexibly and the power balance economically, in the proposed DMPC, multiple DGs are used to compensate for the deviation of voltage.
The schematic of the proposed DMPC for island DC MG with wind/PV/battery is shown in Fig.5.The power referencePRi,i∈G is provided by the EMS, and the state of each DGxi,bus voltageVdcand current in load sideILare measured in real-time.Letbe the expected bus voltage.According to the trend of bus voltage, the current deviation of the DGs can be inferred.This deviation is dispatched by minimizing the depreciation and operation cost of DGs and makes the power of each unit as close as possible to,i∈G.In addition, the number of charge-discharge switching times is also minimized.

Fig.5.The schematic of the proposed DMPC of DC MG.
In each subsystem, a Lyapunov constraint is designed to ensure the real current and bus voltage converge to the desired points.Besides, the integer variable (operation mode of Battery δ ∈{0,1}) and the control variables (inputs of subsystems)are optimized alternatively, which helps the analysis of the stability of the system under the control of the proposed DMPC.
A. Distribution of Power Deviation
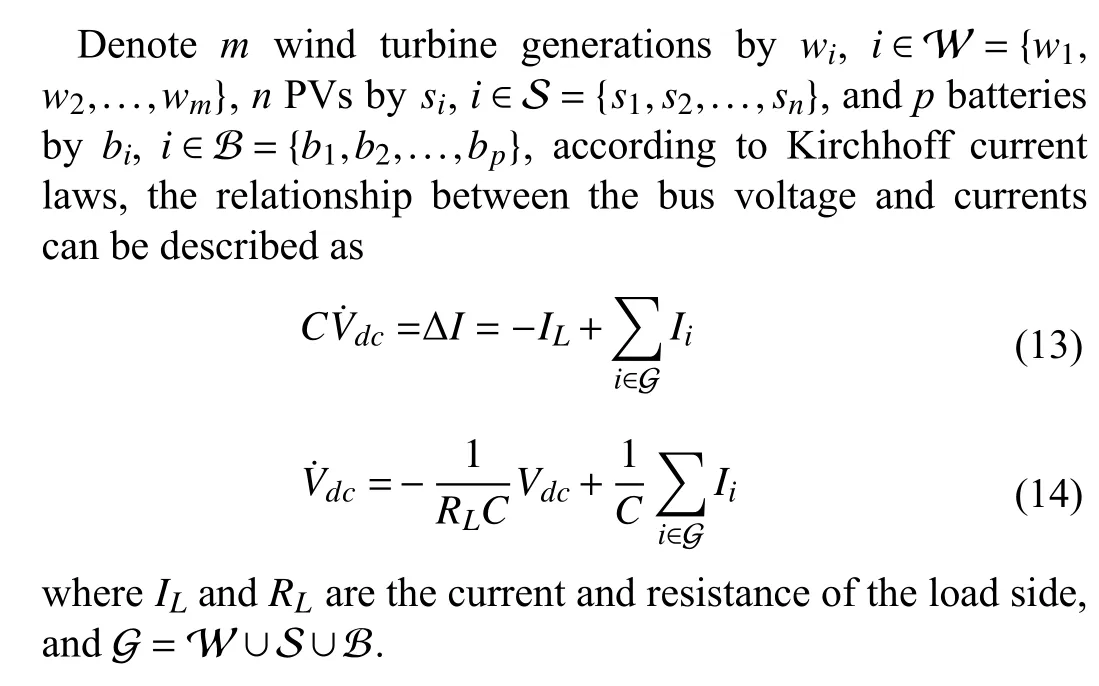
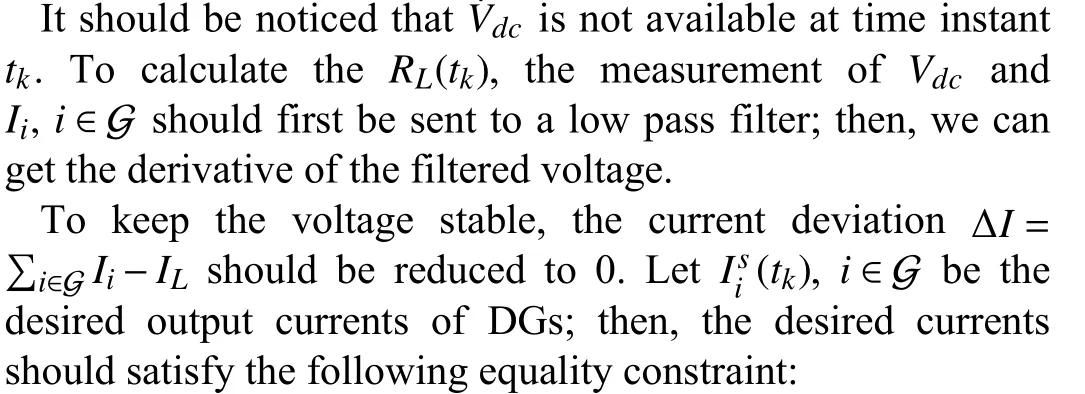
To maintain the stability of the bus voltage while ensuring the economic operation of the MG, the output current of each unit must be kept within a certain range based on the referencePR.According to (13), the mismatch of power between supply and demand sides, which causes fluctuations in the bus voltage, is proportional to the current deviation ΔIbetween the supply and load sides.To ensure that the bus voltage remains at the expected value, the current of each DG must be regulated to the desired value calculated based on
Assume that the load resistance remainsRLfor a short period; then, it follows that:
To further improve the economic performance of the MG,the cost of each DG is considered.For each uniti,i∈G, the costCiis expressed as
whereCi0is the cost of depreciation, andCipis the operating overheads.For RES, that isi∈W ∪S,

B. Subsystem Optimization Problem
With the consideration of the constraint (10), the optimization problem of battery is expressed aswhere (25h) maximizes the energy provided by the RESs under the premise of ensuring the battery life, which allows for the power of battery to be close to the result of the longterm economic optimization.μin (25h) is a simal positive number.Constraint (25i) is used to guarantee the stability of the closed-loop system.
Based on the formulations of the optimization problems presented in (23) and (25), the DMPC algorithm for the DC MG is designed as Algorithm 1.
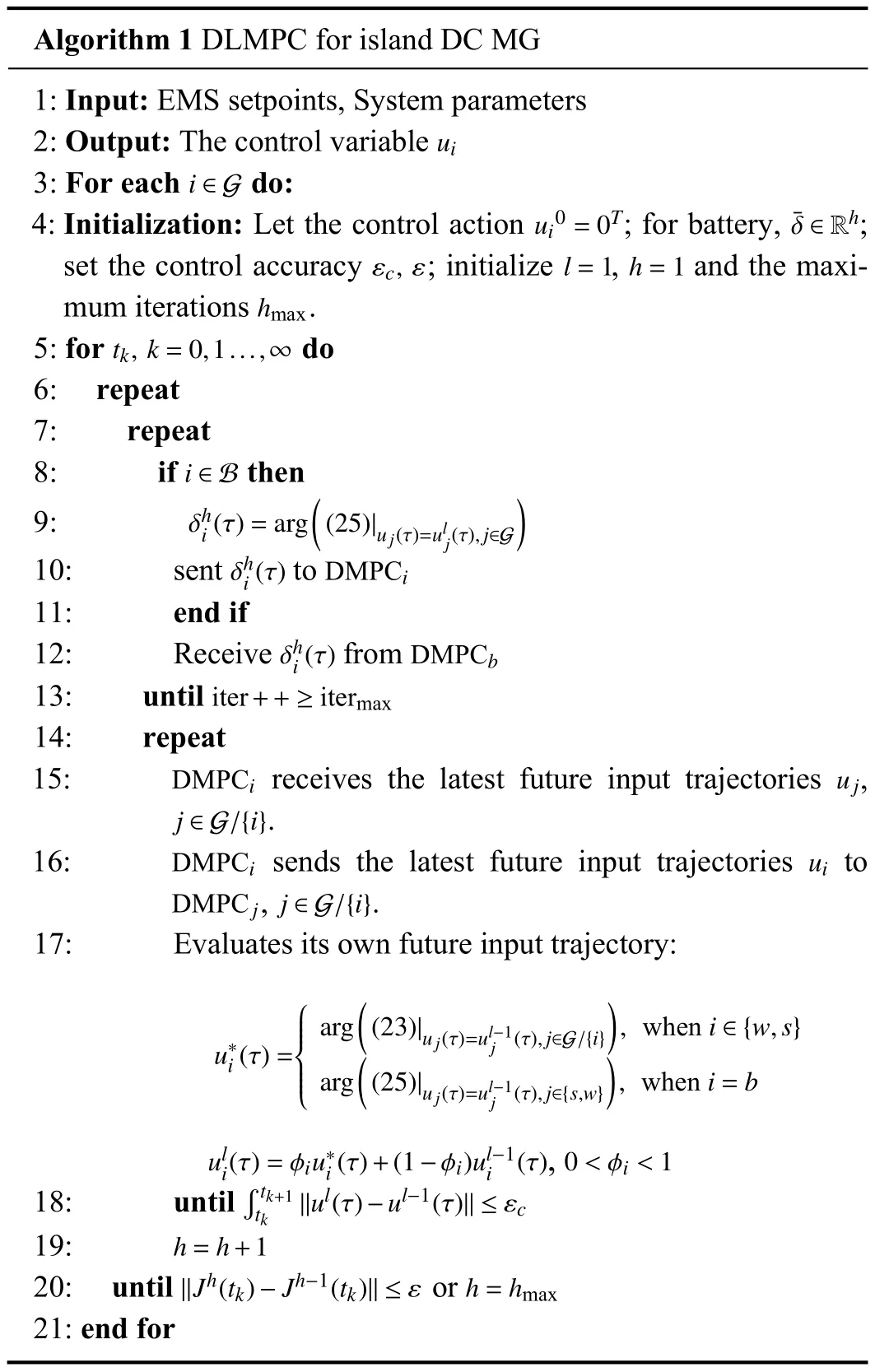
Algorithm 1 DLMPC for island DC MG 1: Input: EMS setpoints, System parameters 2: Output: The control variable i ∈G ui 3: For each do:ui0=0T ¯δ ∈Rh εc, ε l=1h=1 hmax 4: Initialization: Let the control action ; for battery, ;set the control accuracy ; initialize , and the maximum iterations.tk, k=0,1...,∞5: for do 6: repeat 7: repeat i ∈B 8: if then δhi(τ)=arg()9:(25)|u j(τ)=ulj(τ),j∈G δhi(τ) DMPCi 10: sent to 11: end if δhi(τ) DMPCb 12: Receive from 13: until 14: repeat DMPCi u j j ∈G/{i}iter++≥itermax 15: receives the latest future input trajectories ,.DMPCi ui DMPC j j ∈G/{i}16: sends the latest future input trajectories to,.17: Evaluates its own future input trajectory:()u*i(τ)=■■■■■■■■■■■, when i ∈{w,s}arg arg ((23)|u j(τ)=ul-1 j (τ),j∈G/{i})(25)|u j(τ)=ul-1 j (τ),j∈{s,w}, when i=b uli(τ)=ϕiu*i(τ)+(1-ϕi)ul-1i (τ) 0 <ϕi <1∫tk+1,tk ‖ul(τ)-ul-1(τ)‖≤εc 18: until 19:h=h+1‖Jh(tk)-Jh-1(tk)‖≤ε h=hmax 20: until or 21: end for
Remark 1: In the proposed DMPC, with the consideration that the currentIiis coupled with the bus voltage, the dynamics of both bus voltage and currents are considered together in the subsystem MPC optimization problem.As shown in (16),the desired currents are calculated according to the desired bus voltage.We use (23h) and (25i) to guarantee the convergence of the voltage and the current.
It should be noticed that the bus voltage can still be stabilized if the constraints (23h) and (25i) are substituted with
C. Stability
1)Consistency: Algorithm 1 employs a sequential iteration betweenuiandδand a parallel iteration amongui.The discontinuous variableδis optimized for τ ∈[tk,tk+1) in the optimization of the battery, individually.The value ofδis fixed during the parallel iterations among subsystems (Lines 7-12 in Algorithm 1), which results in the entire optimization problem being continuous.Therefore, referring to [34] theuiis convergent by the parallel iteration algorithm if the optmization problem is convex.When the sequential iteration stopped,the consistency ofu*iandδamong each DGS is guaranteed and all the constraints are satisfied.
2)Feasibility: Due to the existence of integer variablesδ,the system can be divided into two operating modes corresponding to differentδ.We present the differences between the variables and functions involved in these two problems by the superscriptm, andm∈{0,1} corresponds to δ ∈{0,1}.


IV.IMPLEMENTATION
Since a fast sampling rate is required in the lower control layer, online optimization may become computationally intractable.Referring to [36], we can approximate each local nonlinear MPC κi,MPCby a mapping function expressed as κi,map,i∈G, with which the computational efficiency of the controllers can be guaranteed.Suitable learning methods can be selected to fit the MPC optimization problems offline, and the fitting errors can be limited within a small range in a certain probability by using Hoeffding’s Inequality.The recursive feasibility of the approximated controllers can be guaranteed and is proved in [36].The specific implementations can be simplified as
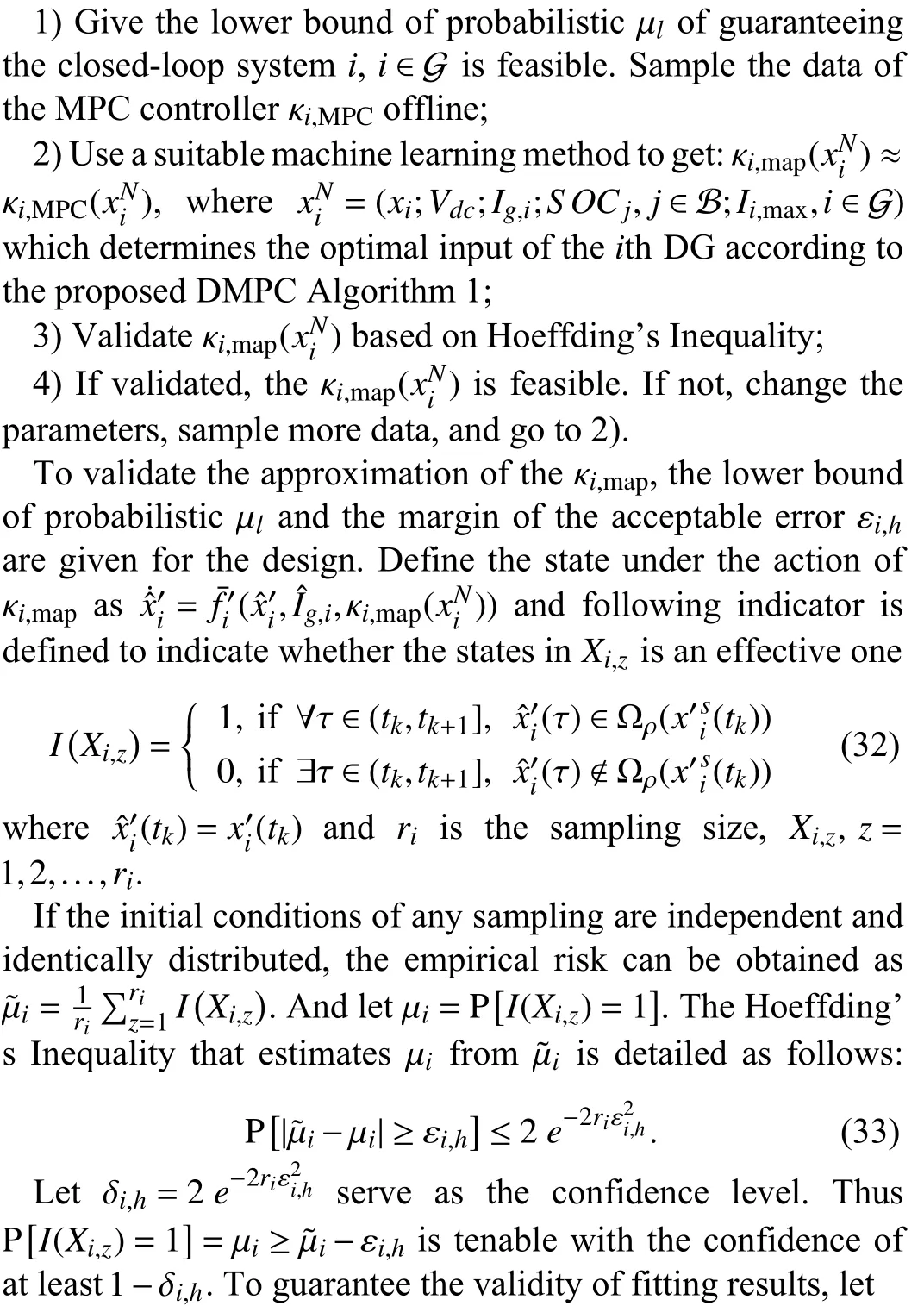
The feasibility of the optimization problem can be guaranteed by increasingriuntil (34) is satisfied.
Remark 2: It should be noticed that, to further reduce the communication burden when the scale of MG is very large,theS OCj,j∈B, can be exchanged during the interval of two sampling time instants and be used in the next sampling time instant.To do this, we should restrict the limitations of the battery’s SOC by an appropriate value ϵ >0 in the optimization problem so that the SOC at timetkis not less than the real limitations.The estimated maximum power limitations of RESs are processed in the same way.With the consideration that thexiandVdccan be measured, the variables that need to be transferred at sampling time instant are theIN,i={Ij|j∈G,j≠i}.If we use (26) as the stability constraint, and delete thefrom the optimization problem.The inputs of the controller’s approximator of DGibecomesxi,S OCj,j∈B, and the estimated maximum power limitations of DGj,j∈W ∪S,j≠i.Among this data,xican be locally real-time measured, theSOCj,j∈B, and the estimated maximum power limitations are exchanged during one or several sampling intervals.
V.SIMULATION
Simulations of the island DC wind/PV/battery MG under the control of the proposed DMPC are carried out.The structure of the MG used in the simulation is shown in Fig.6,which includes 3 rooftop and carport PVs, 3 wind power generations, and a battery module.Each of the DGs is deployed in a separate location.The parameters and configuration of the DC MG refer to one MG of Shanghai Power Supply Company.The detailed parameters of each DG are listed in Tables I-III.
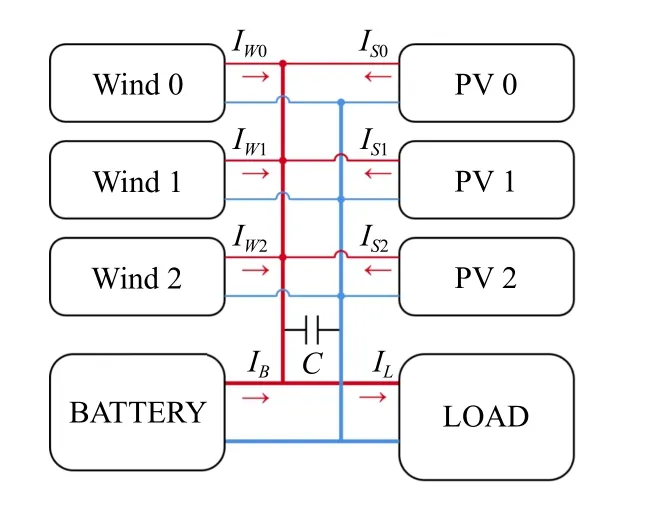
Fig.6.The structure of the DC MG in the simulation.
A. The Performance of the Proposed DMPC
A comparison between the proposed DMPC and the centralized MPC (CMPC) is taken under the same external conditions to illustrate the optimization performance of the DMPC algorithm, which is conducted in personal computers with CPUs of AMD 2.1 GHz.
In the simulation, the reference power is given every 2 minutes by the EMS, and the control period is 100 μs.The prediction horizon of each MPC isN=10.Each subsystem-based MPC is approximated by an artificial neural network (NN)according to the method presented in Section IV.The wind speed (vi) at the location of wind turbineifluctuates within[0 20]m/s, the insolation of each PV varies from 700 to 1000 W/m2and the temperature changes from 25 °C to 27 °C,which are chosen according to the data of normal weather.The load demand (PL) changes at several moments, as is shown in Fig.7.Moreover, to verify the effectiveness in volt-age control, we assume the battery has some fault and is disconnected from the MG after the 80th minute.In this case,only wind and PV generations supply electrical power and participate in the control of bus voltage.

TABLE I PARAMETERS OF WIND GENERATIONS

TABLE II PARAMETERS OF PVS
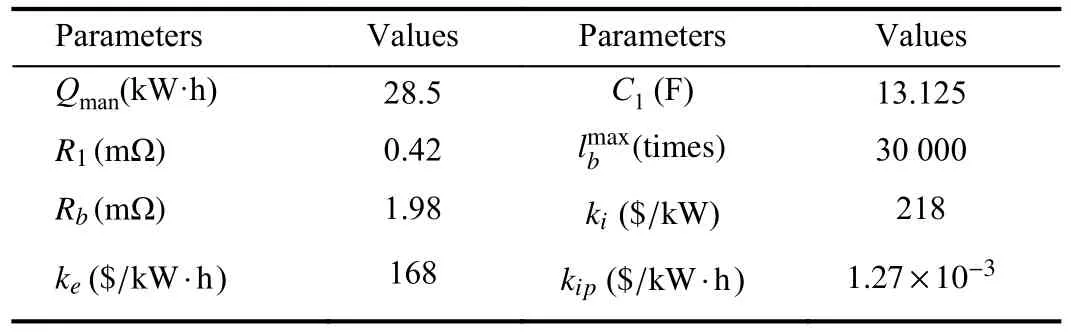
TABLE III PARAMETERS OF BATTERY
The power trajectories provided by each unit under different control schemes and the maximum power constraints calculated according to Fig.7 are given in Fig.8.Fig.9 shows the sum of the power provided by DGs and the power required from the load side.
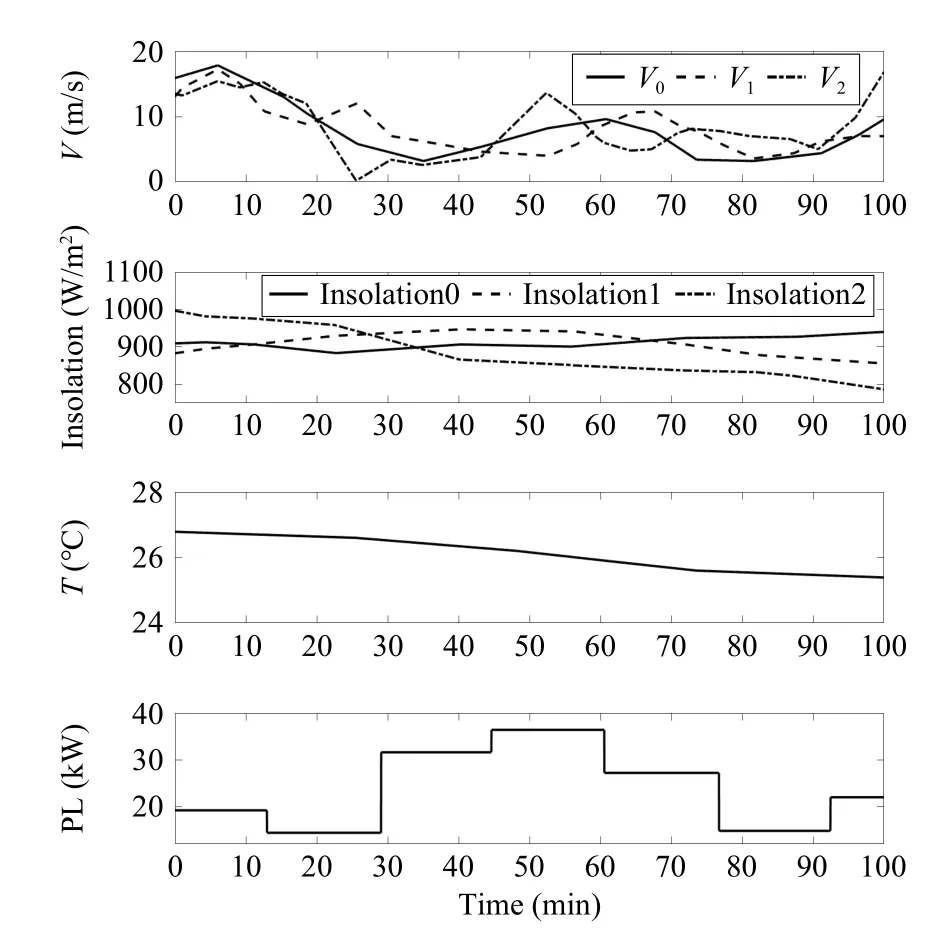
Fig.7.Variation of external conditions.
It can be seen from Fig.8 that, under the proposed method,the trends of the outputs of DGs are the same as that of the reference trajectories provided by the EMS.When the battery is disconnected from the MG, the adjustment of real-time deviation can be realized by coordinating each unit under the proposed scheme.
The output power of DGs under both DMPC and CMPC satisfies the maximum power constraints and the deviation between these two schemes is small.Fig.9 shows that the load demand is satisfied under both DMPC and CMPC with small variations of 0.2643 and 0.2137 which is defined asThe minor delays within microseconds exist in response to the changes in load demand,where both of them are adjusted over a tiny period.
The variation of bus voltage is shown in Fig.10.In both cases, the bus voltage fluctuates within a small range around the desired value of 400 V when the load demand remains constant, and the fluctuation becomes larger and recovers to a small range in a short time when the battery is disabled or sharp changes occur in the load demand.The variation of the bus voltage under the proposed DMPC is slightly larger than that under the CMPC.To better observe the effect of voltage control, the enlarged views at time 1, time 2, and time 3 are shown in Fig.10.At time 1, there is a sharp increase in the load demand, the bus voltage drops by about 7 V and returns to the stable value at about 0.4 s; at time 2, there is a sudden drop in the load demand, the bus voltage goes up by about 4.5 V and recovers within 0.35 s; at time 3, the battery is disabled and removed from the bus, the bus voltage increases by about 5 V and takes about 0.4 s to recover.Overall, the bus voltage fluctuates within a range of ±2.5% and recovers quickly, which meets the safety requirement of electricity in real life.

Fig.8.Power trajectories of DGs.
The economic cost of both schemes under the same external condition is given in Table IV.The obtained cost is 0.1328$/kW·h by the proposed DMPC, and is 0.1315$/kW·hby the CMPC.It can be seen that the economic difference is fractional.Through the comparison, it can be found that the difference in control performance between the DMPC and the CMPC is very small while the DMPC scheme can increase the structural flexibility which is the natural virtue of distributed control structure.
To further illustrate that the computational burden of the proposed DMPC satisfies the real-time control requirement,simulations with different numbers of DGs are conducted.The algorithm is implemented by the computer language C which can provide more efficient computation.The average comput ational time for DGs is shown in Table V, where the communication time is ignored.It shows that the computational effort of the approximator of the proposed DMPC is less than 9µs and does not increases significantly with the increase in the number of DGs.This is because the local controllers are calculated parallel and onlyn“plus” operations are appended when there arenmore DGs in MG.While the centralized MPC which uses one approximator to calculate the control law consumes more time than the proposed method, and the computation time increases with the increase of the number of DGs since the size of the corresponding NN used as the approximator becomes larger.The proposed method is more suitable for the real-time control of MG from the point of view of computation burden.
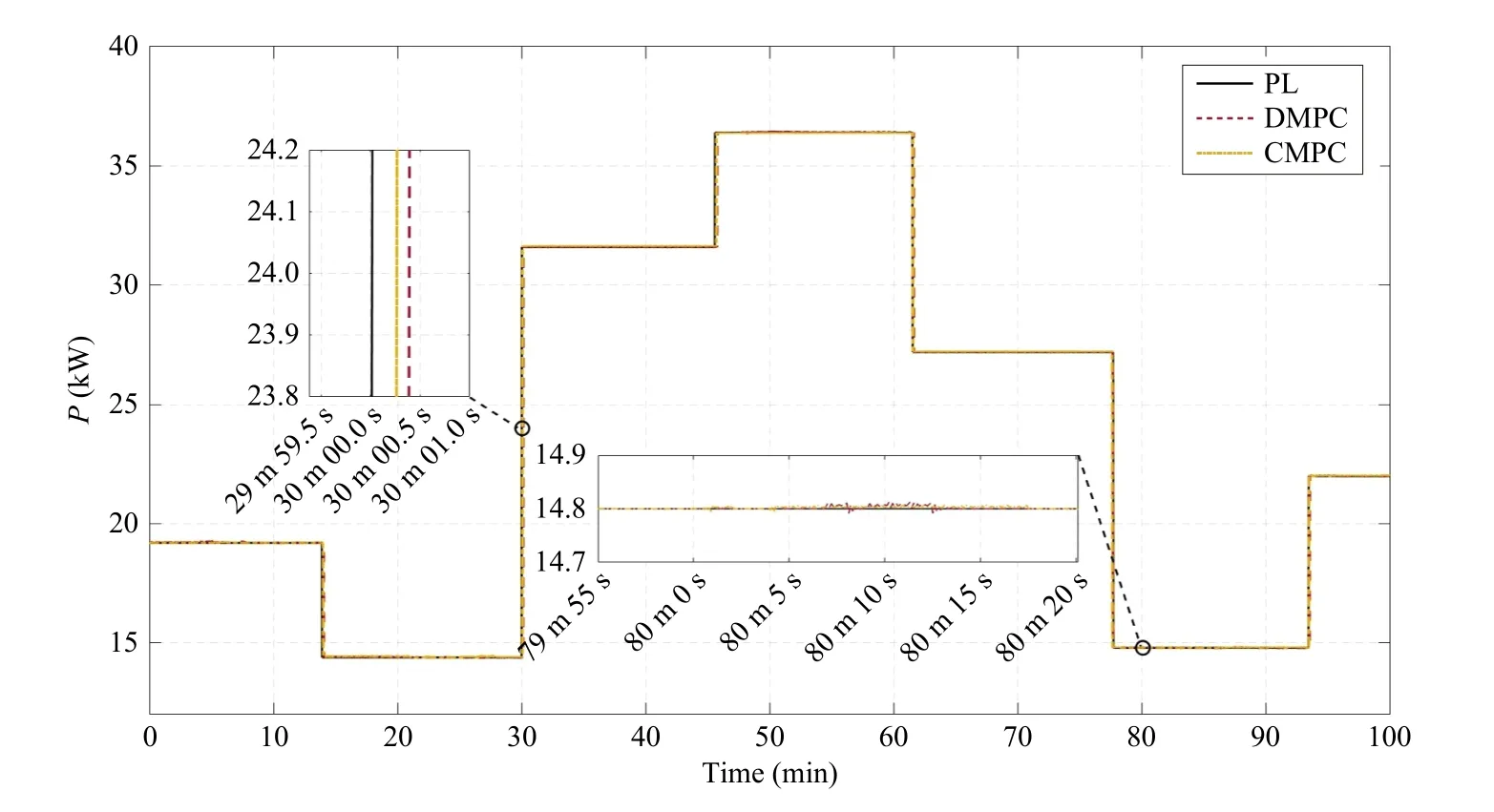
Fig.9.P w0+Pw1+Pw2+Ps0+Ps1+Ps2+Pb under different control schemes and the load demand PL.

Fig.10.The variation of DC bus voltage of the island MG.

TABLE IV PERFORMANCE OF DIFFERENT SCHEMES
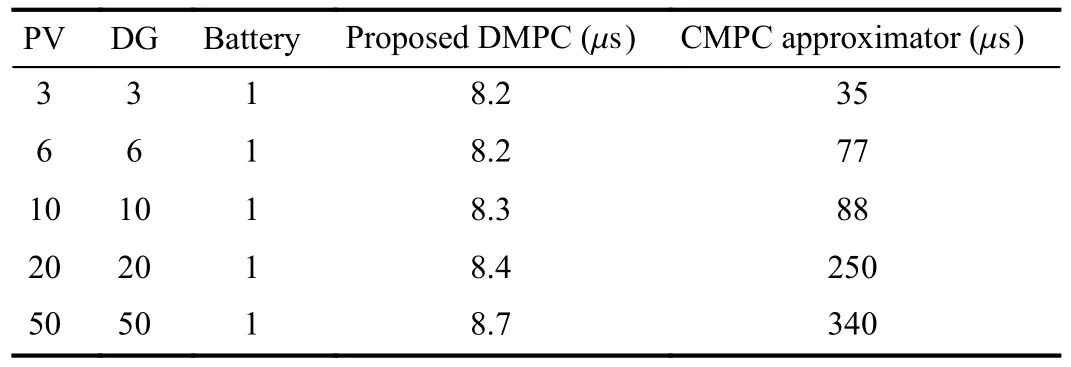
TABLE V COMPUTATION TIME WITH DIFFERENT NUMBER OF DGS
It should be noticed that, with the increase in the number of DGs, the communication burden of the proposed method would increase.Thus, determining whether can the application of the proposed method be extended to a large-scale MG will also depend on the bandwide of the communication network.
B. Comparison With Existing Control Method
The proposed method is also compared with the recently proposed method in [4] where the bus voltage is only controlled by the battery.For simplification, we call it BESS.As shown in Fig.11, the variation of bus voltage under the method in [4] is almost the same as that under the proposed DMPC, while there is a significant increase in the number of charge-discharge switches of battery by the control of BESS,which worsens the economic efficiency.Specifically, during the first 7 minutes, the optimal power of the battery obtained from the EMS is close to zero and there are small fluctuations in loads (or the power generated by WT and PV), the chargedischarge mode of the battery switches frequently under the control of BESS.With the proposed method, the battery keeps discharging during the first 7 minutes.With the method in [4],the economic cost is 0.1532$/kW·h, which is more expensive than the 0.1172$/kW·h that is obtained by the proposed method.Both the reliability and the operational economic performance of the MG are improved by the proposed method.
VI.CONCLUSION
This paper proposed a DMPC to satisfy the requirements consisting of bus voltage stability and the improvement of system’s economic performance.To enhance the reliability of the system, all DGs are coordinated rather than only energy storage being used to adjust the voltage.This can avoid the risk from an unexpected condition in which some DGs fail.Both the long-term and short-term economic performance are considered in the proposed method.The stabilization of the closed-loop system is ensured by the usage of Lyapunovbased techniques.The effectiveness of the proposed DMPC is validated through an example.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- A Dual Closed-Loop Digital Twin Construction Method for Optimizing the Copper Disc Casting Process
- Adaptive Optimal Output Regulation of Interconnected Singularly Perturbed Systems With Application to Power Systems
- Sequential Inverse Optimal Control of Discrete-Time Systems
- More Than Lightening: A Self-Supervised Low-Light Image Enhancement Method Capable for Multiple Degradations
- Set-Membership Filtering Approach to Dynamic Event-Triggered Fault Estimation for a Class of Nonlinear Time-Varying Complex Networks
- Dynamic Event-Triggered Consensus Control for Input Constrained Multi-Agent Systems With a Designable Minimum Inter-Event Time