基于机器视觉的茶叶品种识别研究
2024-03-04江会权
江会权
(浙江农林大学,浙江 杭州 200030)
1 引言
近十几年来,随着对名优茶研究与提升的不断深入,我们所面临的挑战在于如何更进一步地确保茶叶品质,而这种品质的提升离不开中国得天独厚的地理位置和数千年的茶叶文化,尤其是在采摘环节,现代化、高效、高质量的采摘和加工制造成为了至关重要的环节。本文从我国茶类发展现状出发,针对其存在的问题提出一些改进建议,希望可以为今后相关方面提供参考意见。只有在解决这些问题的前提下,中国的茶叶行业才能迈向更高的发展阶段,让全球目光聚焦于我们国家的茶文化,同时也能惊叹于更加先进的茶叶处理技术。因此本文将从茶叶采摘和加工两个方面进行分析探讨,希望能为新时期下我国名优茶生产提供一些参考意见。茶叶的品质取决于其采摘和加工的时间,因此在特定的时间内高效地采摘和加工是至关重要的,若采摘不及时,将会导致嫩芽老化。
2 茶叶识别系统构建及预处理
2.1 机器视觉系统组成
2.1.1 相机的选择。茶叶自主采摘机器人的机器视觉系统,专注于茶树嫩芽的识别和精准定位,是本课题研发的核心技术。由于茶园环境比较复杂,为了提高定位精度,必须选择合适的传感器来采集图像数据,而传统的基于双目摄像头的方法存在一定的局限性[1]。单目相机系统之所以备受青睐,是因为其价格亲民、系统结构简洁,同时还能节省大量安装空间。
通过可调节的基线(双目中心距),USB3.0可变基线的双目视觉相机能够根据工作环境的差异进行相应的调整。通过对摄像机参数和图像采集算法的分析与研究,确定了系统所需要的标定方法。因此,我们所选用的相机型号为HNY-CV-002,其实物图如图1所示,可供参考。

图1 双目摄像头示意图

图2 中值滤波效果
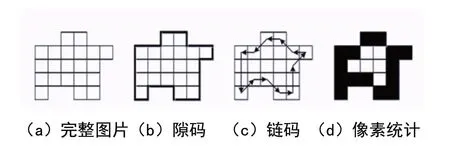
图3 周长的计算示意
2.2 图像平滑处理
中值滤波是一种将图像中各个像素的灰度值进行升序排列的技术,通过将中间的像素点替换为经过处理的像素点,从而实现图像处理的高效化。在图像处理中经常要用到中值滤波器来去除噪声。为了消除图像中的模糊和噪声干扰,我们采用了中值滤波的方法。
2.3 图像边缘检测
Sobel算子是一种离散差分工具,可用于近似计算图像中各个点的灰度值。通过对不同大小、位置及方向上灰度差值进行统计,得到其概率分布曲线。通过运用该算法对图像中的点进行计算,将会得到相应的灰度向量或其法向量。利用这些信息可得到像素点的梯度或斜率等参数,从而对一幅图像进行分割、特征提取以及目标识别。在像素图像边缘检测中,Sobel算子是一项至关重要的操作,它由两组3x3的矩阵组成,分别为横向和纵向,通过将其与图像进行平面卷积,我们可以得到横向和纵向亮度差分的近似值。
所有像素点在图片中的横向和纵向灰度值均由以下公式计算得出,具体的计算方式如下所示:
在实际的工程运算中,我们也可以采用Gx和Gy的绝对值相加等算法来近似计算它们的数值。本文主要研究了用一种新方法来实现边缘检测,即通过引入一个加权因子来提高图像质量。Sobel算子的独特之处在于,它能够通过计算权重差来处理像素点直接相邻的四个方向,从而实现在边缘出现峰值的情况下保留边缘的目的。该算子应用于图像分割时,能很好地把背景区域与目标区域分开来,并且保留了原始信息。除了边缘提取之外,该方法还具备一定的平滑性,能够精准地计算出边缘方向向量。本文提出了一种新方法—基于梯度法的图像边缘检测方法。该方法存在一个缺陷,即在全局范围内提取边界的精度不尽如人意。
3 茶叶叶片识别与定位
3.1 几何特征与形状特征
3.1.1 周长。对于周长所分割的小图像,其边缘所包含的像素数量是多少呢。它是衡量周长大小是否准确和合理的一个重要指标[2]。通常情况下,周长的计算方式有三种,如图4-1所呈现。第一种是在原图上截取一个宽度大于原尺寸的矩形作为初始图片。其中图(a)是初始图像;图(b)所示为一幅图像,其周长由一条加重线条所构成的隙码计算而得,该隙码通过线条长度的反馈来反映图像的周长;图(c)由链码来计算图像周长,链码是图边界上的一条连线,若发生45度连线,则其距离以2为单位;图中每一行都有一个像素对应于该位置上的线段,每个线段代表一条边。图像(c)的统计基于对图像边缘的像素点数量进行分析。对于一些复杂形状的物体或纹理结构的区域可以用这三种方法来实现周长的提取与分析。虽然周长的计算相对简单,但其效果却主要取决于二值化所带来的影响。

图4 基于HSI空间的嫩芽分割效果
3.1.2 面积。计算面积是一种简单而实用的边界计算方法,它通过计算面积相当于统计区域内像素点的数量,从而推导出嫩芽的面积规律[3]。对于学生来说掌握起来并不容易,因此在教学中教师可以借助几何画板来帮助学生理解和记忆这一公式,提高教学质量和效率。以下是具体的数学公式的计算方式:
3.2 特征提取算法
在特征提取流程的设计中,我们需要考虑两个关键因素:一是采用适当的方法,在一定的时间复杂度内对特征子集进行优化,以确定最适合的特征子集;二则通过分析特征集合之间存在的联系来选择最佳特征集。对于特征子集的最优状态,我们需要进行评估和判断,以得出最佳结果。传统上,特征提取流程的构建通常采用“一次扫描”方式,即从数据库中提取出一组数据作为训练集,然后利用这些训练集来完成后续的特征选择工作[4]。在实际的特征判断过程中,我们需要不断地重复前两个步骤,直到找到最优方案为止。该方法不仅可以避免人工选择特征向量的主观性,同时还能够减少计算量。在搜索的过程中,需要同时考虑到算法的时间复杂度和计算精度,以确保最终结果的准确性和可靠性。
3.3 基于色彩空间的分割
3.3.1 图像分割流程。HSI变换后,图像呈现出明显的分界线,使得阈值的设定变得更加容易,从而更容易地将嫩芽分离出来。
通过对实际嫩芽在图像中的颜色表现进行实际调试,并在不同通道中选择多个阈值进行综合判定,我们成功地获得了相对理想的嫩芽区域判定结果。
3.3.2 嫩芽特征分类。经过图像分割后的效果如图4所示。
基于HSI和HSV色彩空间的比较,我们发现HSV色彩空间更适用于茶叶嫩芽的分割。在此基础上,我们提取了嫩芽的几种特征,并初步将其分为全开面、半开面、未开面和不可采摘4种,具体情况见图5。

图5 自然环境下茶叶嫩芽四种状态图像
通过收集大量不同类型的芽叶数据,我们可以建立一个茶叶嫩芽状态的识别模型,从而为提取嫩芽的几何和形状特征提供数据,并为实现茶叶嫩芽的自动分割奠定基础。
3.3.3 对特征子集进行鉴别。特征子集的评价标准是基于对其贡献参数的度量,这是一种用于判断子集优劣的指标。本文提出了一种新的基于模糊综合评判法的茶叶品质评价模型。茶叶的品质可以通过测量茶叶的距离和散布矩阵来判断,这是两种主要的判断方法。散布矩阵测度是将不同产地的茶叶在空间上分布的差异性作为一个重要因素考虑在内的一种评价方式。一种用于比较茶叶子集相似度的算法是距离测度,它利用了茶叶子集之间的距离来进行度量。在对茶样品进行分析时,可以用这些距离来确定各茶样中差异较大的部分。随着茶叶子集之间的差异逐渐扩大,它们之间的距离也会随之增加,从而更有利于进行分解。在对数据集中所有样本的分类时,可以用一个概率函数去衡量其类别间差异程度。当特征子集A和B之间的距离逐渐增大时,它们将被归类为异类样本,呈现出明显的差异。在本文中,我们提出了利用概率距离测度对茶饮料的差异程度进行度量的思想,并给出相应的计算步骤。此外,概率距离度量也是一种相似度比较技术,它通过对各个子集之间的概率分布进行分析,以反映它们的交叉和背离状态。因此,在分类问题中可以用概率距离测度进行区分。常见的度量概率距离的方法包括散布、Bhattacharyya、Chernoff和Mahalanobis等。在生物信息学中,我们可以使用这些距离测度对目标进行分类。在本文中,我们将探讨距离测度的概念,并详细阐述其推导过程;以下所示为其运算的数学公式:
其中ωA、ωB都是等待进一步判断的两类、na、nb为两类的样本数,d(x_i,y_i)为两个向量之间的距离。使用较多的距离计算有欧式距离和S阶Minkowski测度。其计算公式为:
欧式距离公式:
通过上式可见,欧式距离计算其实是2阶Minkowski测度。
3.4 茶叶自动分割的设计与实现
在进行图像预处理的过程中,我们对彩色图像进行了转换,将其转化为灰度图像和HSI色彩图像,并对其进行了轮廓检测。在提取出轮廓后,我们使用阈值法分割出原图像中的目标物体,即获取茶颗粒的三维模型。接着我们删除背景,得到3D距离(300mm~1000mm),此处的距离采用我们使用英特尔Real SenseD435进行拍摄时得到的最佳距离,再对图像进行轮廓检测和Mask矩阵计算,从而得到轮廓中的区域点并将其拆分。
4 总结与展望
考虑到茶叶人工采摘过程的费时费力,本文运用机器视觉技术对茶叶嫩芽进行识别和定位,成功实现了嫩芽图像的分割和采摘识别。该方法能够实现对茶叶进行自动分级和精确定位,为后续的茶叶加工奠定基础。
