面向高速公路智能度分级的路侧感知设备优化布设方法
2024-03-01王孜健么新鹏李一鸣李林茜
荣 文,王孜健,么新鹏,李一鸣,田 彬,李林茜
(1.高速集团有限公司创新研究院,山东 济南 250014;2.长安大学 信息工程学院,陕西 西安 710064)
近年来,交通安全和拥堵等问题日益突出,智慧高速系统应运而生。智慧高速系统可以有效减少事故发生风险,提高通行效率[1]。然而,在高速公路上合理布设感知设备仍然是一个亟待解决的重要问题。布设感知设备需要考虑两个关键因素:感知性能指标和成本约束。为解决感知设备优化布设的问题,国内外学者进行了大量的研究。
赵禹乔将城市道路分为快速路和一般城市道路两类,并利用VISSIM 交通仿真软件对行程时间估计误差进行估计,以优化城市快速路感知设备的布设方案[2]。
Yang Y 提出了一个具有三层LSTM 神经网络结构的行程时间预测模型,采用Dropout 正则化方法提高模型泛化能力和减轻过拟合问题。通过尝试三种不同的输入模型,并使用Python 编程对该模型进行求解,验证了其良好的预测效果[3]。
Liu S 等人认为,单一感知设备的数据可能无法获取全面有效、准确和高质量的交通流数据。为了解决这个问题,他们提出了一种数据融合方法,将神经网络和回归分析相结合,通过整合多个数据源的感知设备数据来扩大数据来源,提高数据质量,为交通管理提供基础支撑[4]。
本文提出了一种新的优化布设方法,针对过去文献中对感知设备布设的不足,如忽略路段划分和差异性,以及对组合感知设备的研究较少等问题进行改进。首先,对道路进行路段划分,并对划分后的路段进行分级;其次,在感知设备的布设方案中,基于同时考虑行程时间和设备成本的原则,寻找最优的布设方案。通过此方法可以更加精确地确定感知设备的布设方案,充分考虑到路段的特性和差异性,并在行程时间和设备成本之间取得最优化的结果。
1 基于DBSCAN 聚类的高速公路路段划分
1.1 智慧高速路段划分目的
高速公路交通感知设备的布设是一项线性工程,公路长达数百甚至上千公里,且受沿线地理区位等的影响,高速公路路段的交通繁忙程度不一,因此在进行感知设备布设时,有必要对高速公路进行路段划分,从而确定检测器的待布设点[5⁃6],以实现最佳的感知效果。在进行优化布设之前,路段划分是必不可少的关键步骤。路段划分的主要目的是确定感知设备待布设的区域,为感知设备的优化布设提供研究基础。
1.2 实例分析
为实现精准路段划分,本文考虑使用流量、密度、速度、交通事件和道路类型等参数作为DBSCAN 聚类的指标。由于一些指标数据可能难以获取,本文选择使用交通流参数中的速度和仿真测试路段的里程作为DBSCAN 聚类的指标,同时可以确保划分出的路段具有相似的交通参数分布。使用DBSCAN 聚类算法可以根据速度和里程的相似性将路段进行划分,从而将具有相似交通特征的路段划分到同一区域。这种划分方式可以提供准确的路段划分结果,为后续的感知设备优化布设提供重要的研究基础。
根据DBSCAN 聚类得到的结果如图1 所示,可以观察到明显划分出5 个区域,每个区域之间的边界清晰可见。基于这个结果,本文将3 000 m 长的仿真测试路段分为以下5 段:0~1 200 m 为自由流路段,1 200~1 500 m为异常停车路段,1 500~2 000 m 为恢复速度后的自由流路段,2 000~2 500 m 为拥堵缓行路段,2 500~3 000 m为恢复速度后的自由流路段。

图1 基于DBSCAN 的路段划分结果
每个路段的起止位置和长度如表1 所示。

表1 仿真测试道路划分结果
2 多目标优化布设模型
2.1 行程时间求解
在交通流参数中,路段行程时间是反映道路交通运行状态最直观的一个参数。可通过将每个布设间距除以对应的感知设备所检测到的速度,得到每个布设间距下的行程时间;然后将所有布设间距的行程时间相加,得到所研究道路的行程时间的估计值。这种方法公式如下:
式中:T'表示研究道路的行程时间估计值;n和r表示划分后的路段数量和具体路段数;i和d表示预先设定的布设间距数量和具体布设间距数;j和c表示路段n被划分为j个i类布设间距和具体分布间距类别;lrd表示路段r第d个布设间距;表示路段r第d类布设间距下,第c个布设间距上感知设备所检测到的速度。
2.2 综合布设费用
在优化感知设备的布设策略时,除了行程时间估计值的准确性,还需要综合考虑感知设备的成本。感知设备的成本是由多个因素决定的,包括感知设备的种类、单价、安装费用、维护费用以及布设的数量等。在设计感知设备的布置方案时,需要权衡成本与性能之间的关系。路段布设感知设备的综合成本公式如下:
式中:Ca为路段a的年平均布设成本;ua为布设在路段a单个感知设备的年平均费用;na为路段a所需要的感知设备的数量;ma为布设在路段a的感知设备的单价;ia为布设在路段a的感知设备的安装单价;sa为布设在路段a的感知设备的年平均维护单价;ya为布设在路段a的感知设备的使用年限。
在具体的工程中,若确定了某一类感知设备,ua就是一个定值,因此本文在进行优化布设时,将该值设置为1,因而实验结果只与变量na有关。
本文采用相对误差(RE)指标来衡量行程时间估计值的准确性,如果相对误差较小,则意味着估计值与真实值较为接近,反之则表示估计值与真实值存在较大的偏差。设T为研究道路的实际行程时间,T'为研究道路行程时间的估计值,则研究道路行程时间的相对误差公式如下:
2.3 多目标优化模型的构建
本文通过引入变量xi来表示路段i布设感知设备的数量,实现对感知设备数量的约束,从而构建了同时考虑布设成本和行程时间估计精度的多目标优化模型,公式如下:
式(5)表示行程时间约束的目标函数,使路段行程时间估计误差达到最小;式(6)表示设备成本约束的目标函数,使布设方案的成本达到最小;式(7)表示每个路段都至少布设一个感知设备。
2.4 多目标优化模型的求解
在多目标优化问题中,存在多个相互矛盾的优化目标,因此无法通过单一的优化算法直接求解最优解。为解决此问题,本文采用多种常见的多目标函数求解方法——加权求和法。
1)对所有目标函数进行归一化处理,即统一量纲,公式如下:
式中:fk(x)是第k个目标函数;fk,max和fk,min是其对应的目标函数的最大值和最小值;Nk(x)是该目标函数归一化后的函数。
2)为所有归一化的目标函数引入权重变量θi,可以根据它们对总体目标的重要性程度进行权衡。这样做的目的是将多目标优化问题转化为单目标优化问题,具体公式如下:
式(9)中N(x)为归一化后的总体目标函数;式(10)则表示各个目标函数的权重值和为1。
3)在将多目标优化问题转变为单目标优化问题时,可以使用加权求和法。假设有两个目标函数,分别是行程时间估计的相对误差函数r和成本的目标函数cost,可得以下公式:
式中:θ表示行程时间估计误差函数的权重值;ri是第i种布设方案下行程时间估计误差的目标函数值;ri,max和ri,min分别表示第i种布设方案下行程时间估计误差目标函数的最大值和最小值;cos ti表示第i种布设方案下的成本目标函数值;cos ti,max和cos ti,min表示第i种布设方案下,成本目标函数的最大值和最小值。
3 实例应用
3.1 实例仿真场景构建
本文采用SUMO 来生成仿真路网,通过调取地图提取G92 高速的道路网络文件,并利用路网编辑器对其进行修补和改善。
G92 高速公路拓扑图如图2 所示。
图2 G92 高速公路拓扑图
图3 所示为G92 高速红垦枢纽立交东侧进出口车道的仿真局部图。红垦枢纽是一个重要的交通枢纽,此设计考虑了实际的道路网络和交通流动情况,为研究G92 高速公路的交通状况提供了有效的仿真模拟。
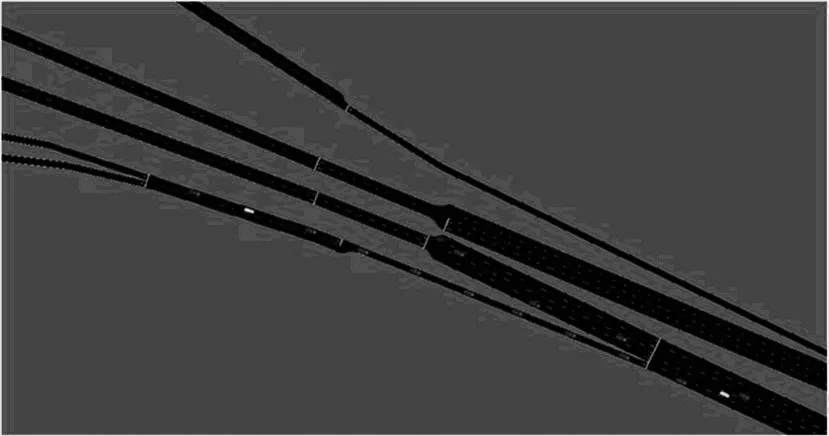
图3 G92 高速的仿真局部图(SUMO)
为了获取每个路段的真实行程时间和用于计算行程时间的速度数据,可以使用SUMO 场景中的E3 检测器监测车辆通过不同路段的时间,并计算出每个路段的行程时间。同时,借助OMNeT++仿真平台,在不同布设方案下模拟感知设备与车辆之间的通信,以获取相应的速度数据。G92 高速的仿真局部图如图4 所示。
图4 G92 高速的仿真局部图(OMNeT++)
3.2 智慧高速路段划分实例应用
G92 高速的全长为78.075 km,在本文使用75 m 作为划分间距,并且将该道路划分成1 041 个等长路段。由于数据较为有限,本文在每个路段的流量上加上一个±400 之间的随机整数,以使得处理后的数据更加符合实际情况。
通过DBSCAN 有序聚类模型,将划分后的所有路段进一步聚类为8 个不同的路段,并将划分后的所有路段作为感知设备的待布设区域。
图5 为将聚类结果映射到实际道路中的结果。
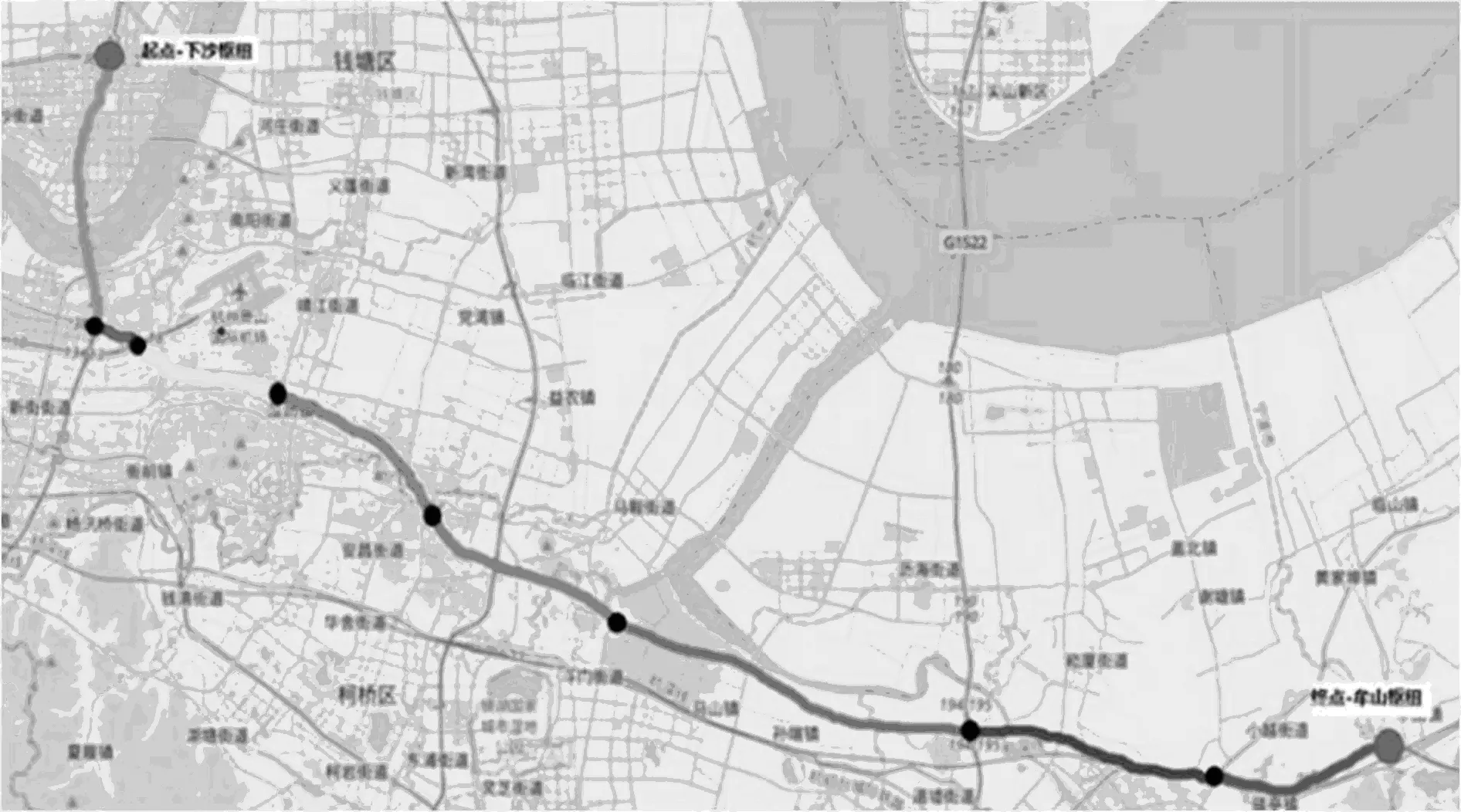
图5 G92 高速路段划分示意图
本文对G92 高速公路进行8 段划分,每个路段的起止位置和长度如表2 所示。

表2 研究道路划分结果
3.3 智慧高速感知系统分级及设备选型
《杭绍甬高速交通状态路侧感知设备体系建设指南》中,将杭绍甬高速公路的感知系统划分为L0~L5六个级别,涵盖了感知水平、管控能力和应对异常天气的能力。本文采用了DBSCAN 聚类对8 个路段进行划分,并以各个路段的年平均流量作为分级指标。根据指南要求,相应的感知设备将被布设在每个级别的路段上,具体的情况如表3 所示。
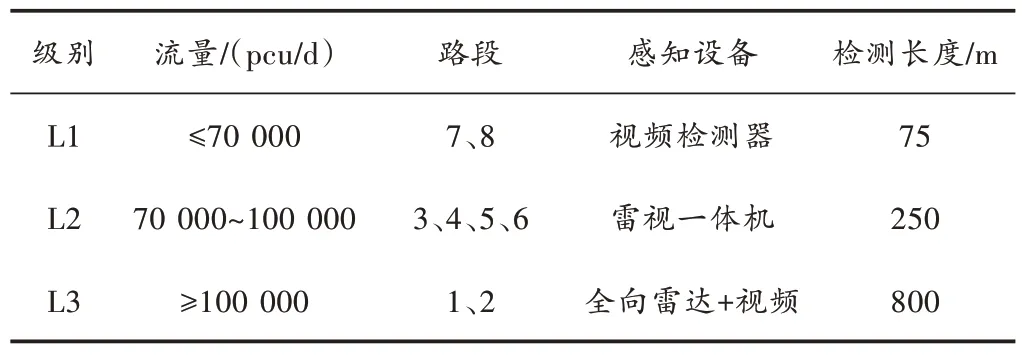
表3 G92 高速目标段分级
3.4 结果分析
本节以路段1 为例,通过实验确定θ值的选取,并分析相对误差、设备成本和目标函数之间的关系,具体结果如图6 所示。
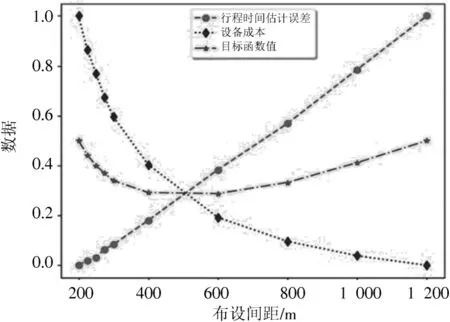
图6 目标函数归一化图
根据图6 可知:随着布设间距增加,行程时间估计精度下降,布设成本降低,而目标函数先降低后上升。目标函数在布设间距较小的情况下先下降,表示在该范围内同时取得较高的行程时间估计精度和相对较低的设备成本。然而,当布设间距继续增加时,目标函数开始上升,这意味着行程时间估计精度的减少超过了设备成本的降低所带来的收益。基于以上分析,本文选择行程时间估计误差与布设成本相交点的权重参数为0.5,意味着将行程时间估计精度和布设成本视为目标函数中同等重要的因素。
本文使用DBSCAN 聚类将8 个路段划分为3 个级别,并选择L1 级中的路段7 和L2 级中的路段4 进行仿真。在仿真过程中,考虑了200 m、400 m、600 m、800 m、1 000 m 和1 200 m 共6 种不同的布设间距,在成本的约束下寻找行程时间估计精度最高的布设间距,即使得目标函数值最小的布设间距。L1 级优化布设例图如图7 所示,L2 级优化布设例图如图8 所示。
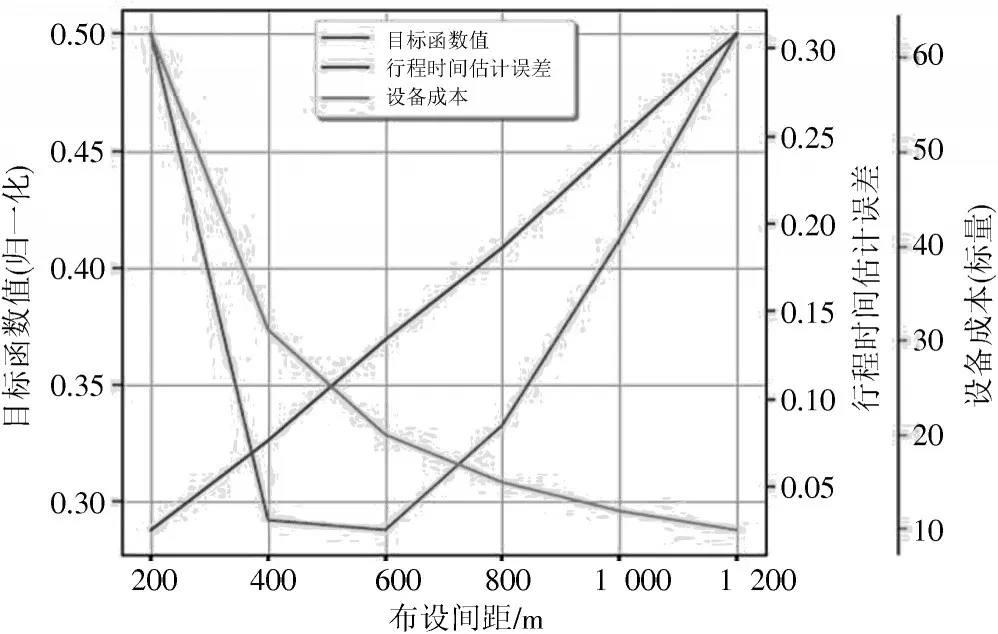
图7 L1 级优化布设例图

图8 L2 级优化布设例图
通过观察图7、图8 可以得出以下结论:随着布设间距的增加,布设成本会减少,但行程时间估计误差会增加。这就导致了目标函数先减小后增加的趋势,因此,在考虑成本约束的情况下,需要找到一个平衡点,既要追求较高的行程时间估计精度,又要控制好布设成本。据分析,路段7 的最优布设间距为600 m,而路段4 的最优布设间距为400 m。因此,在L1 级的所有路段中,选择600 m 的布设间距进行布设;在L2 级的所有路段中,选择400 m 的布设间距进行布设。
本文需要对划分后的8 段路段找到最优的布设间距。每个路段都有预先设定的6 种布设间距,因此总共有16 777 216 种方案可供选择。为了求解最优布设方案,本文采用遗传算法,并使用如表4 所示的参数进行设置。遗传算法能够高效地搜索大规模的解空间,并在多个目标之间找到平衡点,从而得到一个较优的布设方案。通过这种方法可以综合考虑行程时间估计精度和布设成本,并得到最佳的布设间距配置方案。
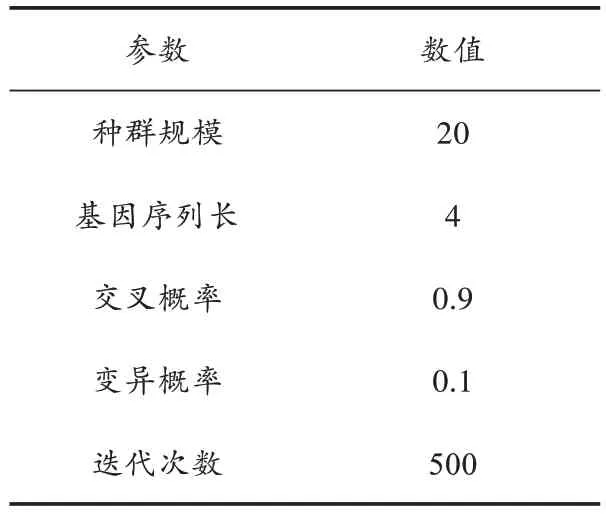
表4 遗传算法参数设定
经过遗传算法的求解,得到了每个路段的最优布设间距。图9 所示为不同路段最优布设数量与行程时间估计误差,其中横坐标表示路段号,左侧纵坐标表示布设感知设备数量,右侧纵坐标表示对应的行程时间估计误差。此结果考虑了行程时间估计精度和布设成本的平衡,为每个路段找到了最佳的布设间距配置方案。

图9 不同路段最优布设数量与行程时间估计误差
根据图9 的结果可以得知,在成本约束下,整个G92高速公路需要布设166 个感知设备,各个路段布设的感知设备数量和类型的具体情况如表5 所示。
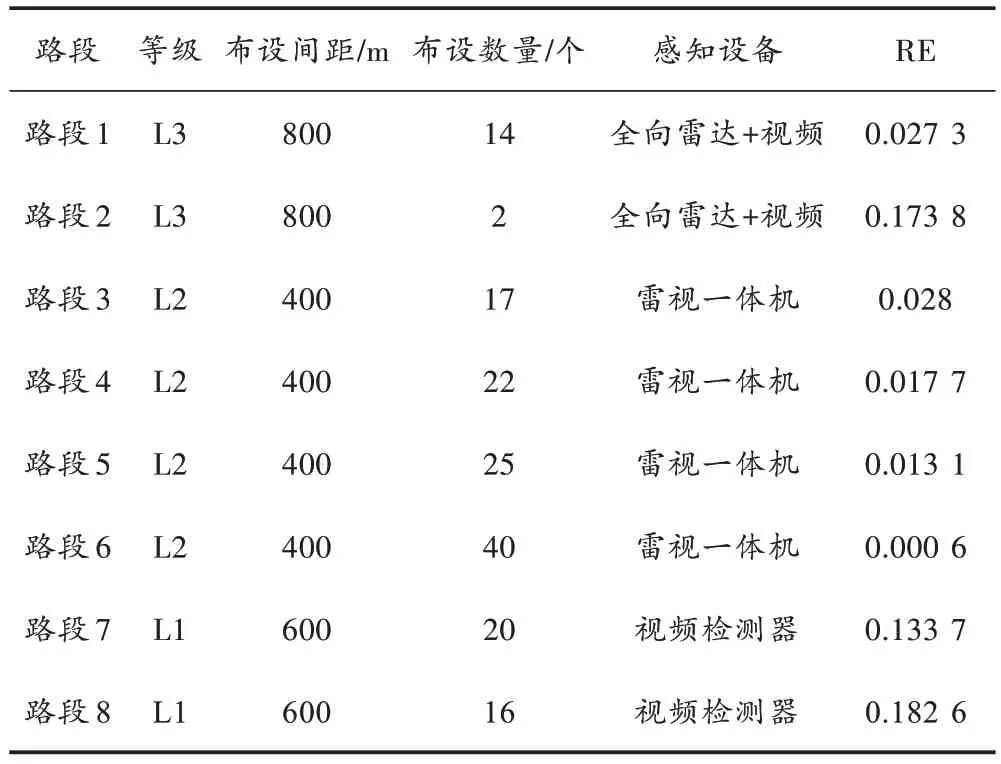
表5 G92 高速最优布设方案
根据最优布设方案,不同路段的真实行程时间与行程时间估计值如图10 所示。

图10 不同路段真实行程时间与行程时间估计值
根据表5 和图10 的结果可知:由于L3 级路段采用全向雷达和视频检测器相融合的全覆盖布设方案,故路段1 和路段2 的行程时间估计与真实值接近;L2 级路段采用雷视一体机进行优化布设,使得路段3~路段6 的平均检测精度达到高水平;而L1 级路段选择了视频检测器进行布设,导致路段7 和8 的平均检测精度较低,综合考虑检测精度和设备成本,做出了一定的妥协。总体而言,各个路段的行程时间估计精度都较高,证明了本文提出的优化布设方法在降低成本的同时能维持较高的行程时间估计精度。
4 结论
为保证多元感知设备在满足感知性能指标的同时,能服从布设成本约束的条件并合理地布设在高速公路上,本文提出一种高速公路交通感知设备的布设优化方法。路段划分是智慧高速感知设备布设的第一步,也是基础工作。为此,本文提出一种基于DBSCAN 聚类的路段划分方法,以里程和速度为聚类指标,通过对人工构建的3 km 仿真测试路段进行划分,将其划分为5 段,作为感知设备优化布设的待布设区域,为后续的布置提供了重要依据。
其次,针对行程时间和设备成本这两个目标,构建了一个多目标优化布设模型。为了解决多目标模型存在的问题,采用加权求和法将多个目标函数合并为单一目标函数,再利用遗传算法进行求解,得到最优解。
最后,本文以G92 高速为研究对象,使用仿真平台构建了相应的模型。通过应用DBSCAN 有序聚类模型,成功地将该高速划分为8 个路段;并根据指南中对感知系统等级的定义,对划分后的路段进行了分级,以便灵活布设不同类型的感知设备。在优化布设的过程中,本文综合考虑了行程时间和设备成本两个因素。通过求解多目标优化问题确定最终的布设方案,即需要布设166 个感知设备。通过布设方案验证了本文方法的有效性。
本文提到在对道路进行划分时,将所有指标视为同等重要,未来可根据划分目的对不同的指标设置不同的权重值,以获得更合理和符合实际需求的路段划分结果。此外,未来的研究可以考虑对移动式感知设备或固定式和移动式感知设备组合布设对数据估计误差的影响进行深入研究。另外,为了增加本文方法和模型的说服力,可采用真实数据进行验证,通过使用真实的数据集可以更好地评估该方法在实际应用中的有效性,并提供更具有可信度和可行性的结论。
