基于北斗卫星通信导航的电力应急抢修指挥系统设计
2024-03-01高正浩李航峰何沛林邓钥丹陈泽瑞
高正浩,李航峰,何沛林,邓钥丹,陈泽瑞
(1.贵州大学 计算机科学系,贵州 贵阳 550002;2.大连理工大学 电子信息与电气工程学院,辽宁 大连 116000;3.贵州电网有限责任公司电力科学研究院,贵州 贵阳 550000)
0 引言
电力设备在运行时,一旦出现紧急故障[1]就会造成巨大经济损失,因此电力应急抢修指挥技术一直是工作人员的研究重点。随着科技水平的不断提升,人们对电力应急抢修指挥技术也提出了更高的要求,不仅要求指挥具备实时性,还要求其具备良好的故障定位能力,而满足这些要求的关键在于对电力应急抢修指挥技术做出优化[2]和改进。通过上述分析可知,电力应急抢修指挥系统的研究已成为目前亟需解决的问题和人们关注的热点。
候慧等人首先根据监测的电力多源数据模拟出设备故障概率,以此构建电力应急抢修调度中心模型;其次结合故障类型的多样性,采用蒙特卡洛场景生成法⁃缩减法得到故障位置;最后采用改进遗传算法对模型求解,完成电力应急抢修的指挥[3]。但该方法没有规划最佳路径,导致电力应急抢修时间过长。
梁海平等人首先将电力设备的负荷恢复效率作为评级指标;其次在电力设备应急抢修过程中,构建基于时间不确定的指挥协同模型;最后将改进粒子群算法与协同优化算法相结合,通过对模型求解完成电力应急抢修的指挥[4]。该方法没有从调度权转移方面出发,也没有考虑负荷损失程度,导致指挥方法的失负荷量较大。
黎振宇等人首先构建基于多元化数据的电力应急抢修指挥体系,并将二元联系数理论对应的多类型指标投入到该体系中,实现电力数据的形式统一;然后考虑指标之间的内在关联,采用基于网络层次分析法的权重划分法确定故障位置;最后通过投影映射法计算出故障目标的抢修顺序,完成电力应急抢修的指挥[5]。然而该方法没有满足故障行波测距,导致故障定位效果差。
为了解决上述方法中存在的问题,本文设计一种基于北斗卫星通信导航的电路应急抢修指挥系统。实验结果表明,所设计系统在提高了电力故障定位效果的同时,一定程度上降低了电力应急故障抢修时间与失负荷量。
1 电力应急抢修指挥系统的硬件设计
电力应急抢修指挥系统采用北斗卫星通信导航平台作为硬件系统核心。当电力设备的运行发生紧急故障时,北斗卫星通信导航平台可以及时地判断故障类型和位置,然后规划前往故障点的最佳路径,同时安排不同的抢修方案。
北斗卫星通信导航平台主要由监测模块、故障提取与转发模块、路径规划模块、调度中心模块构成,整体架构如图1 所示。
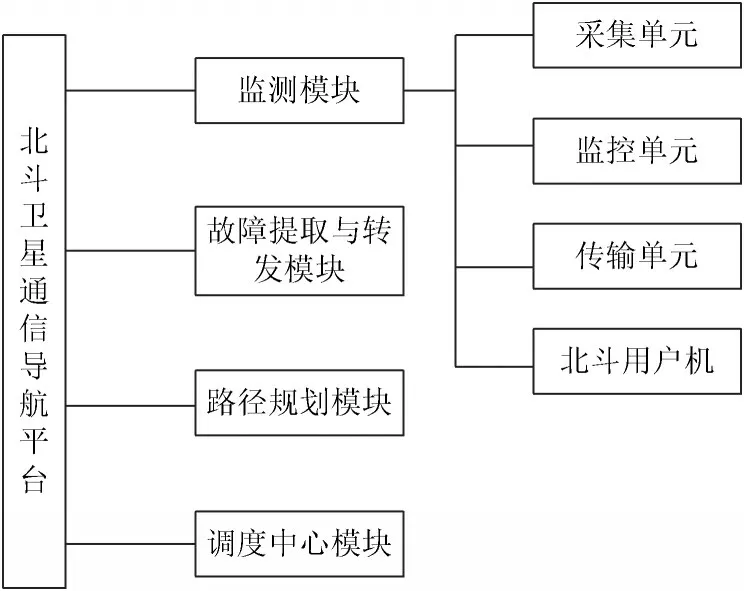
图1 北斗卫星通信导航平台整体架构
1)监测模块
监测模块由数据采集单元、监控单元、传输单元与北斗用户机构成,主要负责电力设备运行信息的双向报文通信。数据采集单元利用其中的行波传感器采集电力设备运行信号;监控单元负责判断信号的运行状态,运行异常的信号即为故障信号;传输单元则将故障位置、故障发生时间、故障频率以电子格式传输给故障提取与转发模块;北斗用户机主要负责信号的精准授时[6]。
2)故障提取与转发模块
电力故障一般采用人工处理流程,这种传统的模式会造成故障检测的疏漏与延误,因此结合故障信号信息,北斗卫星通信导航平台通过故障提取与转发模块实时提取故障信号特征[7],解决电力设备重大故障、紧急故障、安全隐患的分工与协作处理问题。
转发模块将提取的故障特征在第一时间内通知给路径规划模块,目的是缩短应急抢修时间。
3)路径规划模块
作为北斗卫星通信导航平台中的核心模块,路径规划模块是以故障点与线路之间的最短距离为目标的拓扑运算。在电力应急抢修指挥过程中,大多数情况下抢修车辆无法直接到达故障点,为了减短车辆的无效行驶线路,路径规划模块以实际测量的最佳点为基准构建数据库,并将该点作为最佳路径的目标点,从而事先规划应急抢修路径,提高抢修效率。
4)调度中心模块
调度中心模块利用北斗卫星通信导航平台完善的处理功能,从数据库中提取相关的故障信息、路径信息,然后通过对信息的排序、处理、分析来执行相应的应急抢修判决。
2 软件设计
仅仅设计出北斗卫星通信导航平台不足以完全实现电力应急抢修的指挥,故本文在此基础上搭建软件系统。
2.1 故障定位
监测模块一方面可以快速定位电力故障的位置,并提供准确的实时时钟;另一方面能够发送报文信息,报告电力设备的故障信息。故障定位具体步骤如下:
1)北斗卫星通信导航平台的构建与运行,需要保证其报文和授时精度可以完全满足故障行波测距[8]的要求。故障采集通过单向授时与双向授时同步的方式修正授时累积偏差,公式如下所示:
式中:c表示授时累积偏差;ε表示中心控制时钟与用户时钟之间的时间差;mΔt表示传输m帧数据所需的时间;ϕ代表传输信号的时延;t1为接收信号的单向零值;t2为北斗卫星下行导航电文;t3为计算卫星与接收信号之间的传输时间。
2)授时累积偏差被修正后,监控单元将行波传感器的行波信号分解成两个部分,其一作为脉冲信号,其二作为行波信号。其中行波信号由传输单元通道进入监控单元,被用于故障判断。行波信号频率变换范围公式如下所示:
式中:x表示频率年老化率;y表示频率可调范围;z0代表标准频率;z为频率变换范围。
3)电力设备的故障信号可用二阶函数[9]表达,公式如下所示:
式中:D代表故障信号的二阶函数;L1表示比例系数;L2代表比例环节;L3表示的是积分系数;X代表输出频率。
4)在二阶函数表达中,L1反映的是故障信号的跟踪响应,其值越大,表明故障跟踪超调量越小;L3反映的是故障信号的跟踪误差,其值越大,表明谐振频率越高。当L1与L3的值一致时,可以得到故障位置。
2.2 基于GERT 算法的路径规划
得到电力故障点后,路径规划模块采用图形评审技术(GERT)规划最佳路径,以提高电力应急抢修指挥的效率。路径规划具体步骤如下:
1)设P为节点p~节点q的路径实现概率,且完成支线所需时间概率密度为e。引入随机变量时间和任意实数,得到应急抢修路径的概率母函数[10],公式如下所示:
式中:F代表概率母函数;r表示任意实数;T代表随机变量时间。
2)每一条抢修路径都可由参数F和T构成的网络结构H'表达,采用一个与H'结构相似,但只包含一个传递函数的网络H代替H',传递函数公式如下所示:
式中f代表传递函数。
3)根据GERT 网络原理,将应急抢修最佳路径的规划过程定义为等效函数求解过程。采用流线图理论计算GERT 网络的传递函数,得到等效函数,公式如下所示:
式中:f1表示等效函数;n代表节点之间的线路数量;l表示第l条线路;α表示流线图中反映回路的特征值;Δl表示变化值。
4)利用等效函数的性质,计算各路径上抢修的成功概率、风险概率[11]、生命周期方差。成功概率最大、生命周期方差较小的路径即为规划后的最佳应急抢修路径,公式如下所示:
式中:P1表示成功概率;P2代表风险概率;σ代表生命周期方差;E[r]表示生命周期的期望值。
2.3 电力应急抢修指挥
调度中心模块作为应急抢修指挥中心,通过将电力系统信息状态作为关键指标构建事件评价体系,采用信息熵算法与决策树识别调度状态,以安排相应的应急抢修决策,具体步骤如下:
1)从调度权转移方面(如图2 所示)出发,电力系统状态指标应以停电严重程度为主,并包含负荷损失程度、重要用户损失比例与断电持续时间三个要素。采用指标函数[12]表达电力系统故障的影响,公式如下所示:
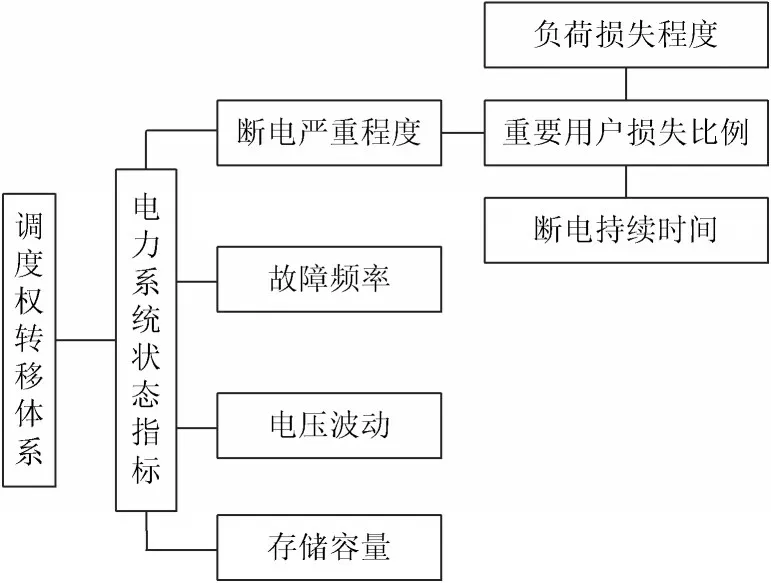
图2 调度权转移体系
式中:G表示指标函数;h代表函数关系;U表示负荷损失程度;V代表重要用户损失比例;C为断电持续时间;M为损失的重要负荷数量;N为重要负荷数量;β表示第i、j个重要负荷的权重;Q代表重要负荷的权重。
2)将指标函数作为启动应急抢修的依据具有一定单一性,所以需要根据不同设备在电力系统运行中的重要程度来控制不同权重[13],然后将这些信号的加权作为启动应急抢修机制的依据,公式如下所示:
式中:R表示信号的加权;χ代表权重系数,由层次分析特征值法获取;δHL,i代表各电力设备的故障危害因子。
3)在构建决策树分类模型过程中,需要通过加权信号的分类属性得到分类所需信息量。设s为一个包含o个信息的集合,对应不同的类别I,则给定对象分类所需的信息量公式如下所示:
式中:J表示信息量;s表示信息个数。
4)设一个信息属性g取k个不同的值,通过属性g可以将J划分为k个子集。当属性g被选为测试属性时,计算当前信息集合所需的信息熵[14],公式如下所示:
式中u代表信息熵。
5)利用属性g对决策树分支节点实行相应集合划分,获得的信息增益[15]公式如下所示:
式中Z为信息增益。
6)选取信息增益最大的属性作为节点,向下生成决策树,将应急状态划分为Ⅰ级、Ⅱ级、Ⅲ级,分别安排不同的抢修措施,具体如下:
Ⅰ级指标:电力系统的属性指标处于临界并带有轻微越限趋势,使其对故障影响的抵抗能力降低,此时需要实时监测并实施预防和维护措施。
Ⅱ级指标:电力系统的属性指标具备严重越限趋势,但调度中心模块仍可以实现电力系统的动态调度,此时应实施正确有效的紧急控制和修复措施。
Ⅲ级指标:电力系统的多项属性指标同时发生严重越限,调度中心模块失去正常工作能力,此时应启动应急指挥中心实施紧急抢救,完成电力应急抢修指挥。
3 实验与分析
为了验证基于北斗卫星通信导航的电力应急抢修指挥系统的整体有效性,进行实验测试。将抢修时间、故障定位效果与失负荷量作为评价指标,采用本文方法、文献[3]方法、文献[4]方法完成对比测试。
3.1 抢修时间
在相同的电力应急环境下,对比各方法指挥后的抢修消耗时间。抢修消耗时间越长,说明方法的抢修效率越低,指挥策略越差;抢修消耗时间越短,说明方法的抢修效率越高,指挥策略越好。
本文方法、文献[3]方法与文献[4]方法的抢修时间测试结果如表1 所示。
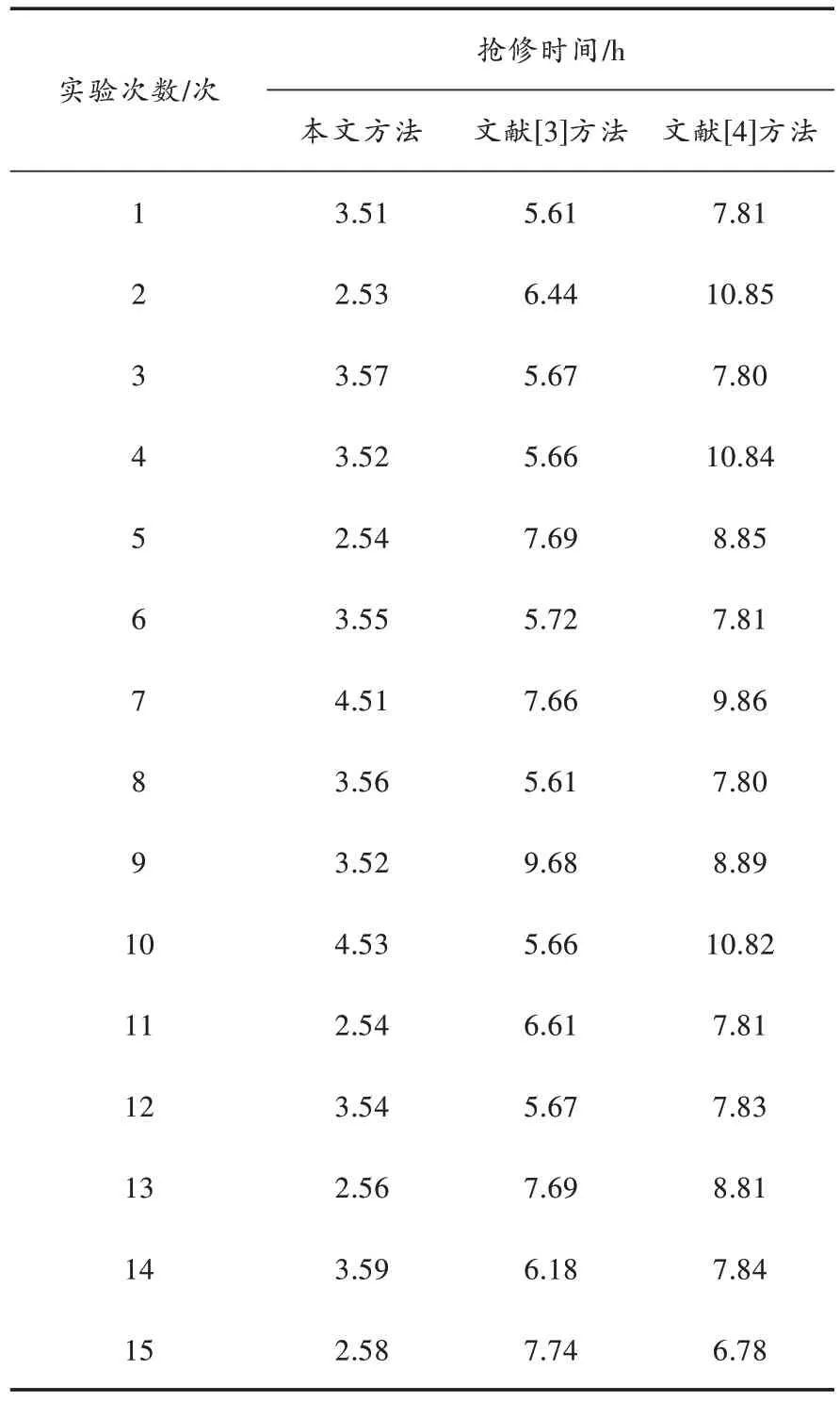
表1 不同方法的抢修时间
分析表1 可知,针对电力应急抢修的指挥,无论在哪组实验中,本文方法指挥后的抢修消耗时间均小于文献[3]方法与文献[4]方法指挥后的抢修消耗时间,说明在本文方法的指挥策略下,电力应急抢修效率较高。
本文方法在电力应急抢修指挥过程中,首先确定故障点位置,然后采用GERT 算法规划出到达故障点的最佳路径,进而提高了应急抢修效率。
3.2 故障定位效果
在IEEE 节点模拟环境中搭建电力系统节点分布模型,如图3 所示,其中节点之间的长度单位为km。
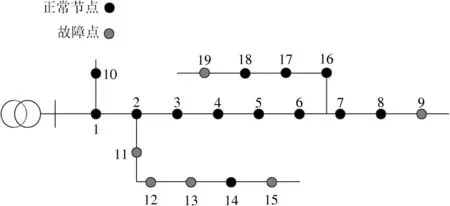
图3 电力系统节点分布模型
本文方法、文献[3]方法与文献[4]方法的故障定位结果如图4 所示。

图4 不同方法的故障定位结果
分析图4 可知:针对电力应急抢修中的故障定位,本文方法准确地定位出6 处故障点;文献[3]方法定位出3 处故障,漏定3 处,错误定位1 处;文献[4]方法只定位出2 处故障,漏定4 处,错误定位1 处。这说明本文方法的故障定位效果优于文献[3]方法与文献[4]方法的故障定位效果。
3.3 失负荷量
失负荷量是指在各个方法应急抢修指挥后的电力设备中,可用功率小于恒定负荷需求功率的值。其值越大,说明方法的指挥性能越差;其值越小,说明方法的指挥性能越好。本文方法、文献[3]方法与文献[4]方法抢修指挥6 处故障点后的失负荷量变化曲线如图5 所示。
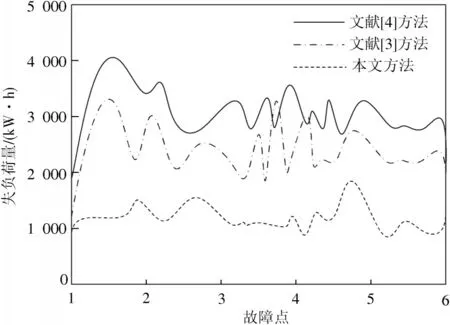
图5 不同方法的失负荷量曲线
通过图5 可知,针对电力应急抢修指挥,本文方法指挥后的失负荷量明显小于文献[3]方法与文献[4]方法的失负荷量。说明本文方法抢修指挥策略减少失负荷量的能力强于文献[3]方法与文献[4]方法,即本文方法的指挥性能优于文献[3]方法与文献[4]方法的指挥性能。
4 结语
针对目前电力应急抢修指挥方法抢修时间长、故障定位效果差、失负荷量高等问题,本文提出一种基于北斗卫星通信导航的电力应急抢修指挥系统。首先设计出多个模块组成的硬件平台;其次设计出故障点定位、抢修路径规划和应急抢修指挥等软件程序,实现电力应急抢修的指挥。实验结果表明,所设计系统在提高了电力故障定位效果的同时,一定程度上降低了电力应急故障抢修时间与失负荷量。
