基于牛顿迭代法的抓斗挖泥船智能精挖控制方法
2024-02-29张红升庞景墩陈磊
张红升,庞景墩,陈磊
(中交疏浚技术装备国家工程研究中心有限公司,上海 200082)
0 引言
抓斗挖泥船,主要用于挖取海底各种淤泥、泥砂、砾石、碎石、巨石等物料,也可以用于航道疏浚、码头施工和海床工程的挖掘。传统的抓斗挖泥船大多为施工人员手动控制抓斗闭合过程,抓斗下放到目标深度后,升降绞车保持静止,开闭绞车向钢丝绳收回的方向转动,抓斗闭合。闭合过程中,斗齿运动轨迹在竖直平面内的投影为一条曲线,因此抓斗控制精度低,且挖掘后形成的水底面高低不平。故此研发抓斗挖泥船的精挖控制方法,采用自动化程序控制抓斗升降绞车与开闭绞车转动速度,使斗齿运动轨迹在竖直平面内的投影为一条直线,即挖掘后形成的水底面为平面,对提升抓斗挖掘精度具有重要意义。
肖汉斌等[1]提出疏浚抓斗平挖运动控制策略,并通过仿真实验验证了控制策略的有效性和准确性。袁子豪等[2]基于抓斗船的挖掘高平整度模型提出高平整度挖掘方法,提高了沉管隧道建设中抓斗船挖掘平整精度。黎蓄[3]通过对疏浚抓斗进行优化仿真改善了抓斗挖掘前后抓取力矩不足的问题。由于疏浚抓斗自身结构特点的限制,在传统操作方式下不能满足高质量的海床平整度要求,国内外诸多学者通过对抓斗理论及其运动的研究表明抓斗挖掘曲线的高低会严重影响海床的平整度,并进一步证明了研究疏浚抓斗平挖运动的重要性[4-11]。
综上所述,目前对疏浚抓斗的研究主要分为2 个方面:1)针对抓斗平挖运动模型施加约束提升挖掘精度;2)通过对抓斗结构进行优化设计以提升抓力。本文在维持疏浚抓斗现有结构的基础上进行算法设计以改变抓斗的驱动方式,即通过对抓斗平挖运动进行分析并建立抓斗平挖运动数学模型,提出了基于牛顿迭代法的智能精挖控制方法,使斗齿运动轨迹在垂直面内的投影为一条直线,提升了抓斗挖掘精度并通过仿真实验验证了算法的有效性。相较于其他方法,基于牛顿迭代法的智能精挖控制方法在工程应用中成本小、效率高。
1 平挖作业及控制要求
抓斗挖泥船的平挖作业是指抓斗在挖掘过程中,斗口的轨迹为一条直线,平挖过程中绞车绳索必须处于绷紧状态且进行一定的协调运动,进而保证工程质量。本文通过抓斗船智能精挖控制系统控制平挖作业,该系统主要由数据采集模块、当前时刻位置计算模块、下一时刻位置计算模块、绞车转速计算模块和绞车变量泵控制模块组成,如图1 所示。系统主要控制对象为液压泵、升降绞车、开闭绞车。其中液压泵主要用来控制全船液压系统,实现绞车的控制功能。升降绞车用于控制升降滑轮,实现整个抓斗的提升和下降。开闭绞车用于控制开闭滑轮,实现抓斗齿的打开、关闭及开度控制。系统部署了绞车编码器、角度传感器、潮位仪和GPS 等设备,实现抓斗智能化精挖过程中的定位定深的信号采集和感知。通过控制计算机连接相关设备,实现智能精挖决策计算,输出相关控制参数。图2 为部署智能精挖控制系统的抓斗船挖泥船结构。

图1 精挖控制系统主要模块Fig.1 Main modules of fine excavation control system
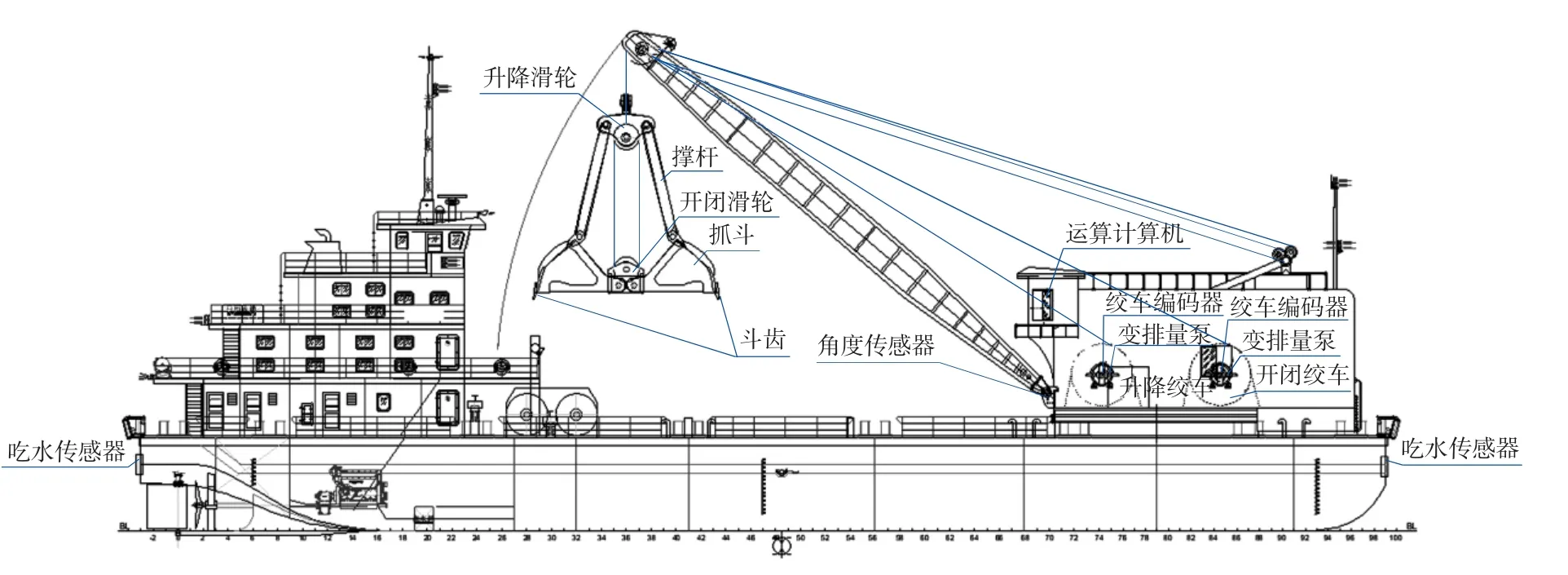
图2 抓斗挖泥船结构图Fig.2 Structural drawing of grab dredger
智能精挖控制系统主要思路是在精挖模式下,通过输入精挖控制深度,在保持斗齿高度不变的前提下,同时控制升降滑轮和开闭滑轮,并实时求解,根据计算结果,控制绞车转速达到相应速度,实现精挖控制。整个过程分为4 个步骤:
1)在抓斗船抓斗升降绞车和开闭绞车上设置编码器,在抓斗臂架底端安装角度传感器;
2)基于抓斗升降钢丝绳绞车、抓斗开闭钢丝绳绞车编码器和臂架角度传感器,计算当前时刻抓斗升降滑轮高度、开闭滑轮高度和斗齿高度;
3)基于牛顿迭代法,求解抓斗平挖运动控制方程,计算下一时刻抓斗升降滑轮和开闭滑轮应该到达的位置;
4)基于下一时刻抓斗升降滑轮和开闭滑轮应该到达的位置,计算升降绞车和开闭绞车转速,并根据绞车转速控制泵排量,驱动相应绞车达到目标转速。
2 模型建立
抓斗挖泥船配备有升降绞车与开闭绞车,疏浚抓斗通过钢丝绳链接,由绞车转动带动抓斗运动。故此需要对抓斗船绞车绳索和抓斗结构进行建模分析,得出抓斗平挖运动控制方程。
2.1 绞车绳索几何分析
图3 为臂架及钢丝绳尺寸标注示意图。通过臂架角度传感器示数α 可计算出臂架顶端点高度ybm,通过绞车编码器示数r 可计算得出各部分钢丝绳长度lr,式(1)—式(6)为各钢丝绳长度的求解过程。
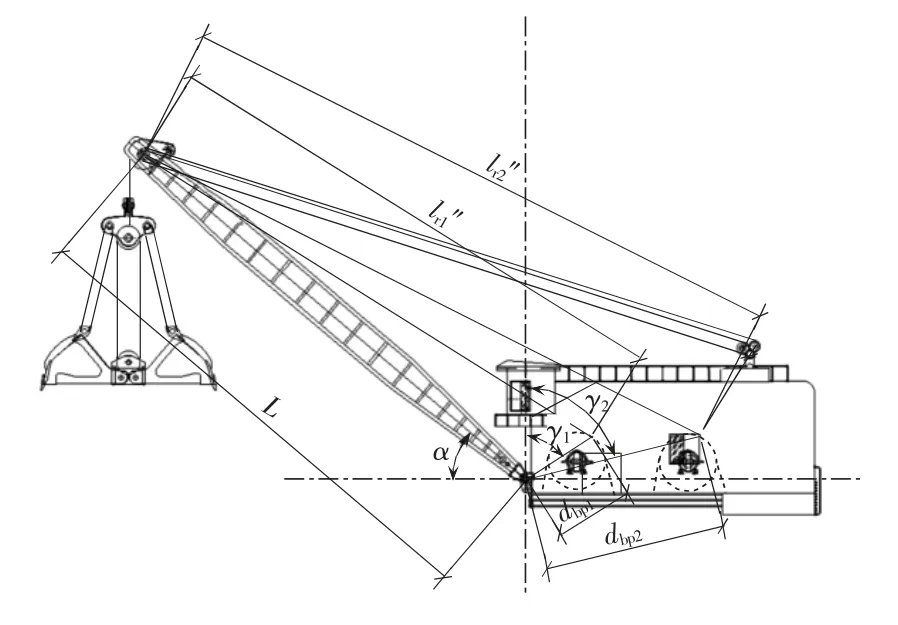
图3 臂架及钢丝绳尺寸标注示意图Fig.3 Dimensioning diagram of boom and wire rope
式中:L 为臂架长度;α 为臂架与水平线夹角;Hd为臂架与船体连接点距离水面的高度;Hbm2为臂架底端点至船底的高度;Dd为船舶吃水;lr1、lr2分别为升降钢丝绳和开闭钢丝绳长度;r1、r2分别为升降绞车和开闭绞车的编码器示数;d1、d2分别为升降绞车和开闭绞车直径;lr1″、lr2″分别为升降绞车出绳点和开闭绞车出绳点到臂架顶端的钢丝绳长度;dbp1、dbp2分别为臂架底端点至升降绞车出绳点和开闭绞车出绳点的距离;γ1、γ2分别为臂架底端点至升降绞车出绳点和开闭绞车出绳点连线与垂线的夹角。
2.2 建立抓斗平挖模型
抓斗由横梁、撑杆、斗体、升降滑轮组和开闭滑轮组组成,滑轮组由绞车驱动,控制抓斗的升降和斗体的开闭,图4 为疏浚抓斗的基本结构。抓斗的作业流程包括开斗下放、抓斗闭合挖泥、升斗卸泥3 个阶段,表1 为作业时的滑轮组状态。
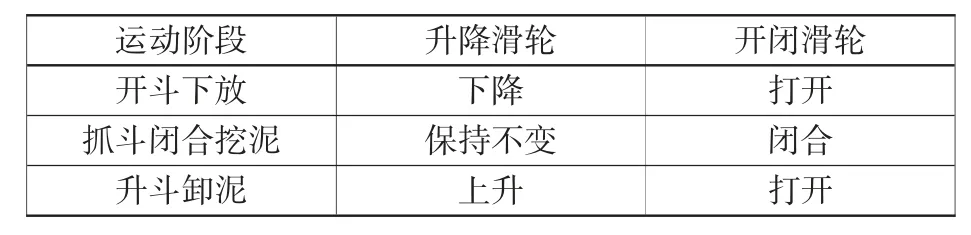
表1 滑轮组工作状态Table 1 Working state of pulley block
现以疏浚抓斗为研究对象,为了便于计算,对抓斗的基本结构进行简化,建立抓斗平挖运动模型,研究抓斗平挖挖掘的运动规律,简化模型如图5 所示。以初始挖掘点水平线为x 轴,抓斗的垂直中心线为y 轴建立坐标系。图中A、C、D分别为斗齿、开闭滑轮和升降滑轮,B 点为撑杆和斗体连接处;a、b、c、d 为抓斗主要结构尺寸,对应所在线段的长度;θ1、θ2、θ3、θ4为对应各线段夹角。平挖作业时斗齿A 点沿着抓斗平挖轨迹线水平运动,开闭滑轮吊点C、升降滑轮吊点D 沿竖直方向运动,其对应高度分别为yc、yd。

图5 抓斗几何模型Fig.5 Grab geometry model
同时,通过上述几何分析,可以得到滑轮组高度和斗齿高度坐标,见式(7)—式(12)。
式中:lr1′、lr2′为升降滑轮和开闭滑轮到臂架顶端钢丝绳长度;yd、yc为升降滑轮和开闭滑轮高度;xa、ya为斗齿水平坐标和斗齿高度。
2.3 抓斗平挖运动方程的建立
在抓斗的平挖运动中,抓斗斗齿标高始终不变,即斗齿沿水平方向做运动,升降滑轮和开闭滑轮沿竖直方向运动,精挖控制系统中通过滑轮的升降位置驱动绞车转动进而完成平挖作业,故此设定升降滑轮和开闭滑轮的高度值yc、yd为待求解,以θ1、θ2、θ3、θ4为中间参数,根据图5 建立方程组(13),该方程组为平挖运动控制方程。
式中:ya为斗齿高度,表示抓斗的挖掘深度。
3 方程求解
3.1 牛顿迭代法
牛顿迭代法是一种用迭代方式求解方程近似根的方法,思路是不断取切线,用线性方程的根逼近非线性方程f(x)=0 的根[12]。设x*是非线性方程f(x)=0 的根,选取x0作为x*的初始近似值,经点(x0,f(x0))做曲线y=f(x)的切线,该切线与x轴的交点横坐标为,x1为x*的一次近似值。同理,过点(x1,f(x1))做曲线y=f(x)的切线,切线与x 轴交点的横坐标为x2记为x*的二次近似值。重复上述步骤,得到近似值序列{xi}。上述求解近似值的迭代过程称为牛顿迭代法,其迭代关系式为:。通常,需设定迭代停止判断条件ε(ε>0),当时,迭代结束。
3.2 基于牛顿迭代法求解平挖运动控制方程
应用牛顿迭代法求解抓斗平挖运动方程,就是通过对平挖运动控制方程组的求解,得到t+1时刻抓斗升降滑轮和开闭滑轮的期望位置yd和yc。设在抓斗精挖过程中,t 时刻的斗齿坐标为(xa,ya),t+1 时刻的斗齿坐标为(xa′,ya′),t+1 时刻抓斗开闭滑轮高度为yc′,图6 为抓斗在相邻时刻的形态示意图,由图6 可得:
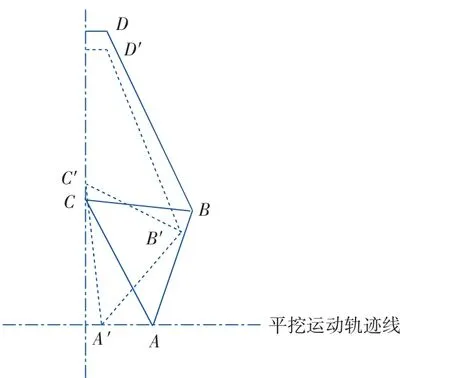
图6 抓斗形态示意图Fig.6 Grab shape diagram
式中:Δx 与设定的闭斗速度相关;θ1′为线段A′C′与中线的夹角。
基于牛顿迭代法求解平挖运动方程的具体原理流程见图7。
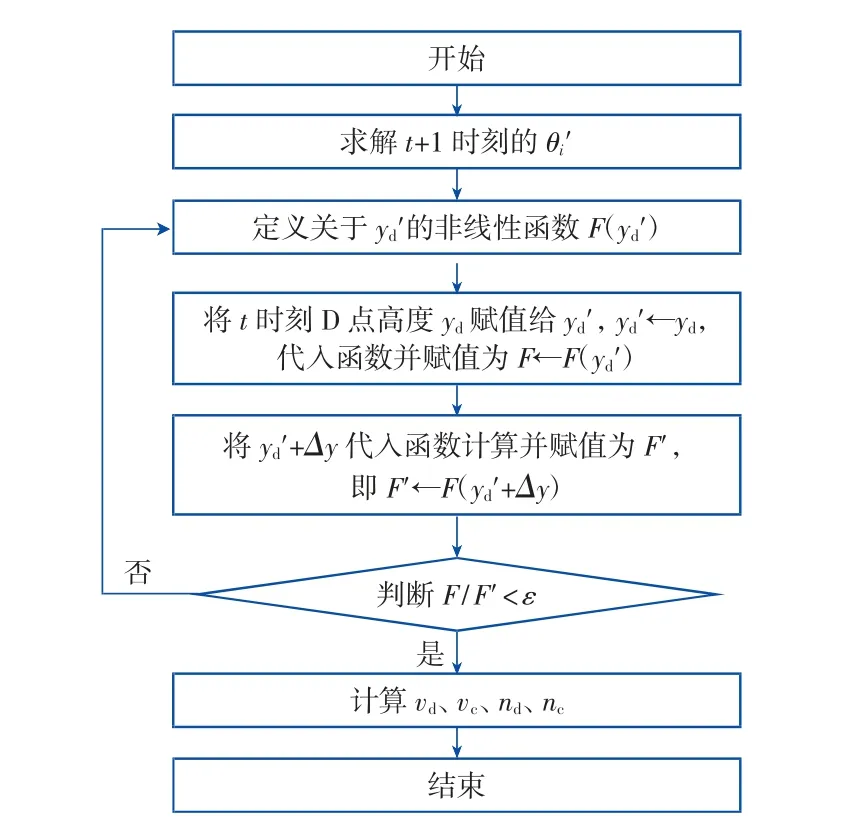
图7 牛顿迭代法求解原理流程Fig.7 Principle flow of Newton iteration method
具体实现流程如下:
步骤1:设t+1 时刻升降滑轮和开闭滑轮的垂向位置分别为yd′和yc′,则线段C′D′与中线的夹角;抓斗闭合过程中,角度θ2保持不变,则;
步骤2:求角度θ3′,由图6 可得θ3′=arccos,c′为图中C′点到D′点间的距离,其值,至此,确定在抓斗闭合过程中,抓斗平挖运动方程中各个角度和线段的计算参数;
步骤3:定义函数F(yd′)=θ1′+θ2′+θ3′+θ4′-π,其中F(yd′)是关于变量yd′的非线性函数,非线性方程F(yd′)=0 的根无法直接求出,因此运用牛顿迭代法进行近似求解;
步骤4:将t 时刻的D 点高度yd赋值给yd′,将yd′代入函数中,得到的函数值F(yd′)记为F;
步骤5:定义一个微小变量Δy,将当前时刻的D 点高度值记为yd′+Δy,计算函数F(yd′+Δy)的值为F′;
步骤8:根据t+1 时刻的升降滑轮高度yd′和开闭滑轮高度yc′,可以计算得到升降滑轮移动速度,开闭滑轮移动速度。根据升降滑轮移动速度计算得到升降绞车转速nd=,开闭绞车转速。进而通过控制变量泵排量以驱动相应绞车达到上述期望转速。
上述步骤中,步骤3—步骤7 为牛顿迭代法求解平挖运动控制方程的过程,通过步骤4—步骤6 的迭代过程,得到满足控制精度的滑轮组升降位置参数,为智能精挖控制系统控制绞车转速提供具体参数。
4 实例验证
4.1 实例仿真
本文选取在施工的某抓斗挖泥船为研究模型并搭建仿真试验平台,其主要参数见表2。在升降绞车和开闭绞车中分别安装1 个变量泵和编码器,用于驱动绞车转动和计算绞车当前圈数。在实例仿真前对编码器进行校零:当出绳量为0 时,绞车圈数为0。

表2 抓斗挖泥船主要参数Table 2 Main parameters of grab dredger
基于牛顿迭代法的精挖控制系统进行平挖作业,其控制过程如图8 所示。
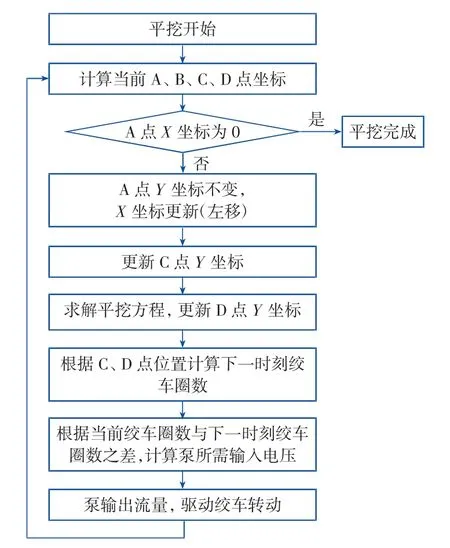
图8 平挖作业控制流程Fig.8 Flat excavation operation control process
在t 时刻,船舶吃水为3 000 mm,臂架角度传感器示数α=π/4,臂架顶端到水面的高度ybm为22 298.839 8 mm。根据绞车编码器示数,此时升降绞车圈数r1为11.552,开闭绞车圈数r2为13.810。通过式(7)—式(12),计算得出滑轮组高度和斗齿高度,其中,升降滑轮到臂架顶端钢丝绳长度lr1′为11 369.857 0 mm,开闭滑轮到臂架顶端钢丝绳长度lr2′为17 123.507 0 mm,升降滑轮高度yd为10 928.983 mm,开闭滑轮高度yc为5 175.332 mm,θ1为0.831 7°,θ2为0.981 7°,θ3为1.224 3°,θ4为0.103 7°,进而得出斗齿水平坐标xa为2 933.610 7 mm,斗齿高度ya为2 502.003 1 mm。
设定闭合速度为500 mm/s,在t+1 时刻,xa=2 433.611 mm,ya′=ya=2 502.003 mm,进而求得yc′=5 637.334 mm。
应用3.2 节中牛顿迭代法编程求解,其具体求解过程如下:
1)将yd赋值给yd′,则yd′=10 928.982 8 mm,定义ε=0.1,Δy=1 mm;
2)求出各线段夹角为:θ4′=0.112 6°,θ3′=1.358 9°,θ2′=0.981 7°,此时非线性方程F=F(yd′)=θ1′+θ2′+θ3′+θ4′-π=-0.028 1°;
3)将yd′加上Δy,重复计算得:θ4′=0.112 6°,θ3′=1.358 6°,θ2′=0.981 7°,F′=F(yd′)=-0.028 4°;
该仿真实例中,经过96 次迭代,满足迭代停止条件,此时yd′=10 840.838 5 mm。随后计算可得升降滑轮的移动速度vd=-88 mm/s,开闭滑轮的移动速度vc=462.002 mm/s,升降绞车转速nd=-0.028 r/min,开闭绞车的转速nc=0.147 r/min。最后计算所需的液压泵排量,驱动绞车达到相应转速,完成t+1 时刻的计算。重复上述过程,直至完成作业要求,即可实现抓斗精挖自动控制。
4.2 仿真结果分析
图9 为抓斗挖泥船在作业过程中斗齿横向位移随时间变化曲线。仿真结果显示,随着平挖运动的进行,斗齿横向坐标不断更新向左偏移,表征抓斗在不断闭合,当斗齿横坐标为0 时,平挖作业完成。

图9 斗齿横向位移曲线Fig.9 Lateral displacement curve of bucket tooth
图10 为抓斗船在平挖作业过程中,吊点和斗齿垂向轨迹曲线。图10(a)为轨迹曲线随时间变化趋势,主吊点随着作业的进行先上升后下降,开闭斗吊点随着作业的进行不断上升,当作业完成时达到最大值,而斗齿垂向位移轨迹始终为一条直线,表征斗齿始终沿着同一深度开展作业。图10(b)为轨迹曲线随抓斗开口度变化趋势,随着抓斗的闭合,主吊点和开闭斗吊点均不同程度地上升直至作业结束,而在作业过程中,斗齿垂向位移始终保持不变。
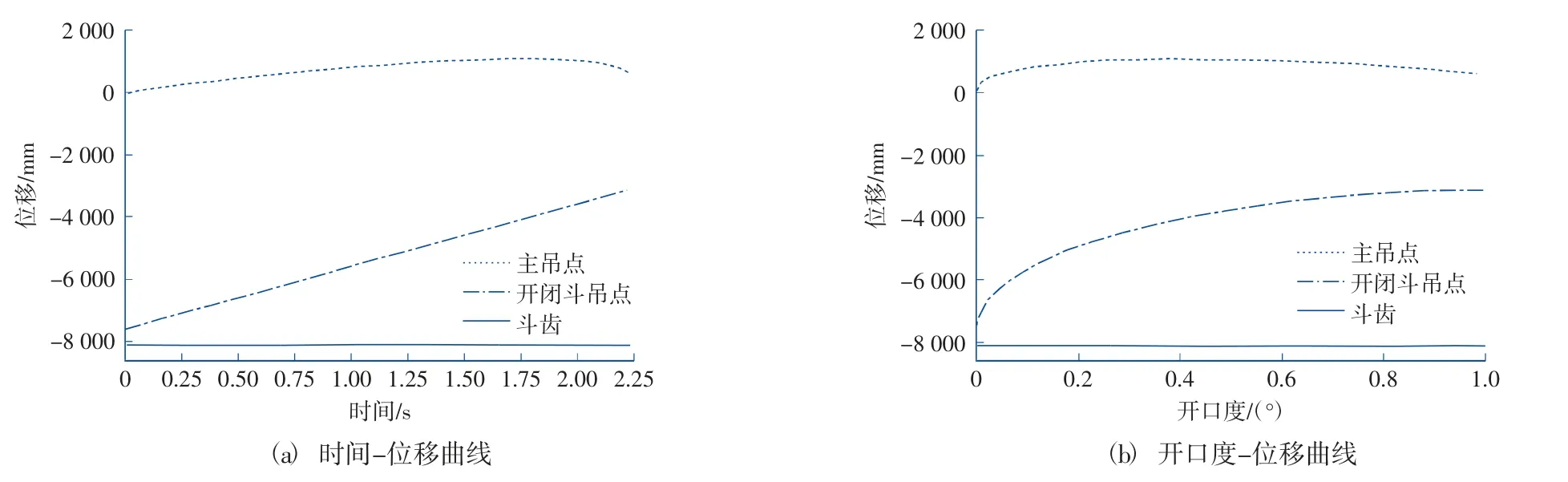
图10 平挖运动位移曲线Fig.10 Displacement curve of flat excavation movement
综上所述,在作业过程中,斗齿始终沿着平挖作业的固定深度开展作业,在竖直平面内的投影始终为直线,进而表明本文提出的抓斗船精挖控制方法,挖掘后形成的水底面为平面,满足工程实际需要。
5 结语
通过对抓斗平挖运动数学模型进行分析,提出了基于牛顿迭代法的抓斗挖泥船智能精挖控制方法,通过该方法求解抓斗平挖运动控制方程,设计自动化程序控制抓斗绞车的控制速度,并通过数值仿真试验验证了所提方法的准确性和有效性。与现有技术相比,基于牛顿迭代法的精挖控制方法提高了抓斗挖掘精度,能够使斗齿运动轨迹在竖直平面内的投影为一条直线,即挖掘形成的水底面为平面,节省了疏浚工作的工程量。