基于指纹库更新补偿的波束跟踪算法研究
2024-02-29崔字宇王亚舟
崔字宇,魏 浩,赵 琪,王亚舟
(中国电子科技集团公司 第54研究所,石家庄 050081)
0 引言
针对远距离、高动态无人机自组网[1-3]在复杂电磁环境下对电子信息设备的需求,波束形成的方式正由现有的机载全向天线、机扫定向天线朝着相控阵天线技术方向发展[4]。定向天线具有高度指向性的特点,波束宽度窄,能量集中,故通信双方进行极小的相对移动或者自身姿态改变,就会导致波束未对准造成失配的问题,影响通信质量。
保证通信双方可以保持稳定的通信状态,对波束跟踪算法的研究具有非常重要的意义,目前在波束跟踪研究技术中,有较多的研究成果:文献[5]利用信道稀疏性的特性对到达角和离开角进行估计,实现波束跟踪,但没有对信道的动态变化所带来的影响进行分析。文献[6]提出利用一阶高斯-马尔科夫模型的信道参数状态演化模型对信道参数的跟踪估计问题。为波束跟踪的后续研究提供了一种参考方法。
根据算法中是否需要对先验信息进行更新验证来区分,可以将目前的跟踪算法分为盲跟踪算法和非盲跟踪算法两类,盲跟踪算法只需要利用每次跟踪时隙所接收到的数据进行跟踪预测,不需要先验信息进行更新,文献[7]提出了恒模算法进行跟踪,但只能适用于信息准确,环境较为理想的条件下,不适用于复杂的无人机自组网环境中。对于非盲跟踪算法,文献[8]提出了最小均方(LMS,least mean square)算法,易于实现,性能稳定,但是收敛时间长,无法满足高动态、快变化的需求。文献[9-10]提出的梯度跟踪算法计算时间慢,波束切换复杂,在远距离大范围通信网络中不具有实用性。非盲跟踪算法主要是基于卡尔曼滤波算法进行研究。文献[11]提出了矩阵分解信道跟踪算法(MF-EKF),在拓展卡尔曼滤波算法(EKF)的基础上引入矩阵分解算法(MF),实现方位角和俯仰角的解耦,随后定义代价函数,通过随机梯度下降法来对分解的信道矩阵实现元素级的修正校准。减少了平面阵列因耦合带来的影响,提升了算法精度,为后续的跟踪算法研究提供了思路。文献[12]在EKF的基础上提出了一种基于二阶拓展卡尔曼滤波(SOEKF)并辅以低复杂度的波束切换方案的跟踪算法,但是基于EKF的跟踪算法均需要计算雅克比矩阵,计算时间长,跟踪性能一般,无法满足自组网的跟踪需求。为了避免计算雅克比矩阵,文献[13]提出了基于无迹卡尔曼滤波(UKF)的波束跟踪算法,相较于EKF算法,在快信道变化环境下,算法的跟踪精度提升了50%以上。文献[14]在UKF的基础上提出了自适应无迹卡尔曼波束跟踪算法(AUKF),相较于基于EKF和UKF的算法提高了跟踪精度,但是在角度变化大的情况下,跟踪性能差,误差不满足跟踪需求。
上述基于卡尔曼的波束跟踪算法研究中,均利用了信道信息(CSI)进行波束跟踪,没有考虑无人机在飞行过程中,飞行轨迹的剧烈变化会引起自身载体坐标系的旋转,从而影响了波束指向角度的状态转移矩阵的改变,而且自身姿态会随着无人机飞行轨迹的变化发生大幅度抖动,影响波束指向,导致通信双方无法完成建立通信的环节。
本文针对上述存在的问题,模拟仿真了无人机在快速起飞和同飞行高度转向两种飞行环境下的波束跟踪算法性能。在飞行轨迹较为复杂的基础上,又加入了无人机飞行姿态的变化对载体坐标系建立的影响,使波束跟踪的环境更加复杂,需要考虑的噪声影响因素增多,为了解决在上述更加复杂多变的环境下,波束跟踪依旧可以保持很好的跟踪性能的问题。本文提出了更符合现实场景的波束跟踪算法流程,设计了指纹库更新补偿算法,通过每一时隙获取的信息,对当前时刻的状态信息和无人机的状态转移矩阵进行更新补偿,并利用后验信息更新指纹库,满足无人机高动态的需求。
1 整体波束跟踪框架的设计
卫星拒止环境是指卫星导航信号在空域中传播受到了当前所在的自然环境的干扰或建筑物云层等的遮挡,以及某些针对GNSS的人为攻击等原因,造成导航精度大幅度下降甚至停止工作无法完成定位的区域。卫星拒止环境根据其产生原因可以分为3种情况:第一种是由于卫星信号的功率过低、穿透力太弱而导致的;第二种是由于在此区域中,人为设置了各种干扰设备导致卫星信号无法正常被接收;第三种是由于导航卫星故障或失联导致无法发送导航信号等各种原因,造成了某区域内可用导航卫星数不足4颗而形成的。一般针对无人机环境而言,拒止环境多由人为攻击和大面积云层导致的。
在卫星拒止、电磁环境复杂的环境下,无人机定位信息不准确,无法得到对方准确的角度和距离,从而无法进行波束指向,实现双方通信。
本文基于波束成形原理,在获取观测信号后,利用相控阵天线各个阵元与入射信号的相位关系,计算目标所在角度,完成角度估计。然后利用波束跟踪算法得到下一时隙目标角度,达到波束跟踪的目的。波束跟踪算法的计算角度与实际角度差值越小,则认为跟踪性能越好;通信质量的判断以半波束宽度为指标,若超出半波束宽度,则认为波束跟踪失败,需要重新进行空域全扫描建立通信。由于波束的跟踪误差会随跟踪时隙累积,则波束跟踪的时隙次数也是衡量算法的标准。
在每个跟踪时隙中进行波束跟踪算法时,无人机在飞行途中的姿态也会发生变化,影响机载相控阵天线的实际指向,故在每个时隙进行波束跟踪算法前,需要获取自身姿态信息并进行更新校准,然后进行波束跟踪,完成一次跟踪流程。
整体的波束跟踪流程如图1所示:首先通过全空域扫描实现波束对准,通信成功建立后进行姿态信息更新,利用更新后的姿态建立载体坐标系,进行当前时刻波束跟踪,并将观测数据更新到指纹库内。具体跟踪算法流程于3.2节介绍。

图1 波束跟踪流程图
2 姿态信息预测更新
基于定向天线的无人机自组网在建立通信前,首先需要实现波束对准,而波束指向信息需要利用精确的姿态信息建立载体坐标系来求解。所以无人机姿态信息的精度[15]决定了波束跟踪的精度。在进行波束跟踪算法前,需要对当前时刻的姿态进行更新求解,获取更准确的载体坐标系。
2.1 姿态信息解算
载体坐标系与无人机机体本身是固定联系的,本次设定坐标x轴指向右机翼,y轴指向机头,z轴通过右手法则确定。
欧拉角[16]是描述姿态信息最直观、简单的方式。即同一时刻连续3次不同轴的转动角称为欧拉角,如图2所示:无人机绕z轴旋转α,绕y轴旋转β,绕x轴旋转γ,形成了新的坐标系,根据角度定义可知,α为无人机偏转角,β为翻滚角,γ为俯仰角。

图2 姿态坐标转换示意图

根据欧拉角计算坐标姿态矩阵如公式(1)所示:
(1)
但欧拉角在计算过程中涉及到三角函数的复杂运算,而且在俯仰角为90°时出现容易奇异点,不适用于工程解算。采用四元数[17-18]法代替欧拉角的表示。
而对一个坐标系作平移,使其原点与另一个坐标系的原点重合。由于两坐标系均为直角坐标系,各个轴之间始终保持90°,因此两坐标系间的空间角位置关系可看成为刚体围绕原点的转动。从这一基本思想出发,可获得姿态更新的四元数算法。
四元数的表示形式为:
(2)
其中:q0、q1、q2和q3均为实数,i、j和k为互相正交的单位向量。且令其2范数等于1,q的2范数满足:
(3)
利用四元数法表示无人机姿态信息,可以得出:
(4)
其中:x=[αβγ]T代表无人机姿态信息角度。

(5)
2.2 卡尔曼姿态预测
卡尔曼滤波算法适用于线性、有限维的系统。每一个基于线性函数表示的离散系统都可以转换成用状态空间变量表示,从而利用卡尔曼滤波进行每个时隙的计算。当观测数据和状态联合服从高斯分布时用卡尔曼递归公式计算得到的是高斯随机变量的条件均值和条件方差,从而卡尔曼滤波公式给出了计算状态的条件概率密度的更新过程线性最小方差估计。
综上所述,本文利用四元数法和卡尔曼滤波算法的优势,对姿态进行预测更新:
1)设置卡尔曼滤波初始变量q:
(6)
2)利用k-1时刻进行预测,其中Γ为四元数间的状态转移矩阵:
q(k/k-1)=Γq(k-1)
(7)
3)估计k时刻状态变量的预测协方差矩阵κ(k/k-1)。
κ(k/k-1)=Γκ(k-1)ΓH+Qχ
(8)
其中:Qχ为状态变量的噪声协方差,决定了无人机姿态的变化程度。
4)计算卡尔曼增益,Hk为无人机姿态传感器读数矩阵。
(9)
(10)

7)将更新后的姿态信息进行坐标转换,获取新的载体坐标系,并存入数据库,为后续波束指向提供准确的坐标信息。
3 波束跟踪设计
3.1 观测信息
定义发送端和接收端使用统一的均匀矩形阵列(URA,uniform rectangular array)。
信号到达URA时会在水平维度和垂直维度的阵元上产生不同的时延,而阵列流型向量反映了各个阵元与入射信号的相位关系,可以通过不同的波束成形,对不同阵元的信号进行加权运算,根据接收信号解算出目标所在位置,这就是波束成形技术的基础。
波束成形[19]可以通过对多路信号进行加权合并,抑制非目标方向信号,增强目标方向信号;进而能够实现对特定方向的发射和接收,有效提高信号的信噪比,也起到了降噪的作用;同时,随着相控阵阵元数量的增多,能量更加聚焦,波束宽度更窄,对波束跟踪算法的精度需求进一步提高。
波束成形可以用在发送端,对相控阵不同阵元上的发送信号引入相位偏移,使最终的发送波束朝着预计的指定方向传输,完成定向通信。该技术也可以用在信号接收端,在接收端,波束成形技术可以通过阵元与入射信号的相位关系实现角度估计。

(11)

(12)
故,接收端的三维阵列导向矢量可由水平导向矢量和垂直导向矢量的克罗内克积表示为:
a(φr,θr)=ar(ur)⊗ar(vr)
(13)
同理可得,发送端的三维阵列导向矢量表示为:
a(φt,θt)=at(ut)⊗at(vt)
(14)
三维阵列天线接收信号可表示为:
(15)
其中:索引i表示LOS(Line of Sight Range)路径,索引n表示NLOS(Non Line of Sight Range)路径。w和f分别为收发两端的三维模拟预编码矩阵,vk~CN(0,1)/10SNR/20。若只针对视距路径LOS的信道状态信息进行追踪。省略下标n,即:
(16)
根据上述描述,可以利用马尔可夫状态方程建立跟踪算法模型,设置状态变量为:
Xk=[αR,k,αI,k,φr,k,φr,k,φt,k,φt,k]T
(17)
其中:αk表示接收信号的强度,衡量目前功率是否满足通信所需的强度,并将实部与虚部分开计算,防止在计算过程中,损失信号相位的必要信息。φk和φk表示双方相控阵波束指向的俯仰角和方位角。
用Hk表示信道矩阵,接收信号可以表示为:
zk=HkXk+vk
(18)
综上所述,如图3所示可以利用波束成形原理通过接收信号zk作为观测值,进行波束跟踪。

图3 观测信息示意图
3.2 基于卡尔曼的指纹库更新补偿算法
波束跟踪系统具有非线性和计算复杂的特性,经典的卡尔曼滤波算法无法保证跟踪精度,且计算时间长;故本文提出了基于单形采样策略的无迹卡尔曼滤波的指纹库更新补偿算法。
3.2.1 无迹卡尔曼的单形采样策略
经典卡尔曼滤波算法提供了一套针对在线性系统中的解决方案。而在实际应用中,对于非线性系统而言,根据传感器数据进行条件概率分布的计算会使得计算过程很复杂,甚至无法顺利进行。故,对概率分布进行近似要比对非线性函数本身近似更容易,而且精度会更高,Unscented变换(UT,unscented transformation)UKF便是基于UT被提出的。
UT变换[20]利用一组Sigma采样点来描述状态向量的高斯分布,然后通过非线性函数的传递映射,再利用加权统计线性回归技术来近似线性函数的后验均值和方差。最核心的是Sigma点的采样方式的选择,要合理的规划在UT变换过程中所选取的Sigma点的数目、分布和权重。为满足预测协方差矩阵的半正定性,防止在变换中产生采样的局部效应,同时降低算法的整体计算时间,采用比例修正的最小偏度单形采样策略:
(19)
β是与状态向量的先验分布相关的参数,针对高斯分布,β=2是为最优。ωi为各采样点进行加权求均值的权值。α为采样比例因子,初值为1,为了实现每次采样都可以在理想范围内,后续设计了自适应采样因子。

(20)
1)在1维的状态下迭代初始向量:
(21)
2)当输入维数j=2,…,n时,迭代公式如下:
(22)
对所生成的Sigma点加入X的均值和协方差信息:
(23)
3.2.2 更新指纹库的补偿算法设计
无人机在飞行过程中,轨迹会因各种因素发生改变,而且在拒止环境下无法实时获取准确的双方消息,导致波束跟踪失败。本文设计了利用预测信息获取的状态均值,以及通信双方传感器数据,更新状态转移矩阵和协方差矩阵,对波束指向信息进行更新补偿,进行第二次预测。
更新补偿算法设计:
UKF滤波受初始值影响较大,此外系统噪声同样也会影响滤波结果。为了减少这些影响,需不断调节协方差矩阵,可以在一定程度上改变其在滤波过程的作用[21]。
无人机在飞行途中,传感器回传的数据中可以解算出无人机的速度矢量信息,角度变化和通信的时隙等信息,而状态转移矩阵Fk的更新,可以极大地提升后续预测均值和协方差矩阵的准确性,将无人机的下一时隙的波束指向确定在更小的误差范围内。
本文利用无人机的指纹库数据,计算状态转移矩阵Fk,弥补了其他传统的波束跟踪算法研究中,因无人机轨迹和姿态发生大的变化而无法进行跟踪的问题:
(24)
根据指纹库信息和状态转移矩阵Fk,通过贝叶斯原理,计算当前状态变量概率密度函数在观测值下的极大值,得到均值补偿和协方差矩阵补偿并更新指纹库:
(25)
[Pk-1FkT(Pk/k-1)-1]T
(26)
通过指纹库更新补偿后的数据,设计自适应比例因子,自适应比例因子可以调节Sigma采样点的采样比例和加权的权值,从而达到减小高阶误差,避免采样的非局部效应的作用。但传统的无迹卡尔曼算法在使用比例修正进行UT变换时,通常是给α取一个固定的值,虽然会在部分情况下得到采样值在期望的范围内,但在跟踪过程中,不是每个时隙都能保证采样比例取得最优值。如果能在递归运跟踪算法时,每一时隙的自适应因子选取一个最合适的参数,充分发挥UT变换后的跟踪性能。为此本文提出了一种基于更新补偿的自适应选取α的方法。tr(PXk|k)反映了预测数据点集的集中程度,利用当前时刻采样点到中心点的距离和当前点集的集中程度的比值来进行自适应因子的调节,如式(27)所示:若采样点超出理想范围,采样点的集中程度变差,采样比例α值会变小,实现自适应的目的:
(27)
3.2.3 波束跟踪流程
基于无人机姿态信息预测后,在新的载体坐标系下进行波束跟踪。
首先进行全空域扫描,直到成功建立通信,通信所得数据和无人机自身姿态信息存入指纹库。通过指纹库信息预测波束指向,并利用无迹卡尔曼算法进行更新校准,同时将获取的数据更新到指纹库内;根据指纹库的信息和当前时刻获取的信息进行状态向量的均值和协方差补偿,经过补偿算法后的状态向量会更接近理想角度,提升通信质量。具体跟踪流程如图4所示。
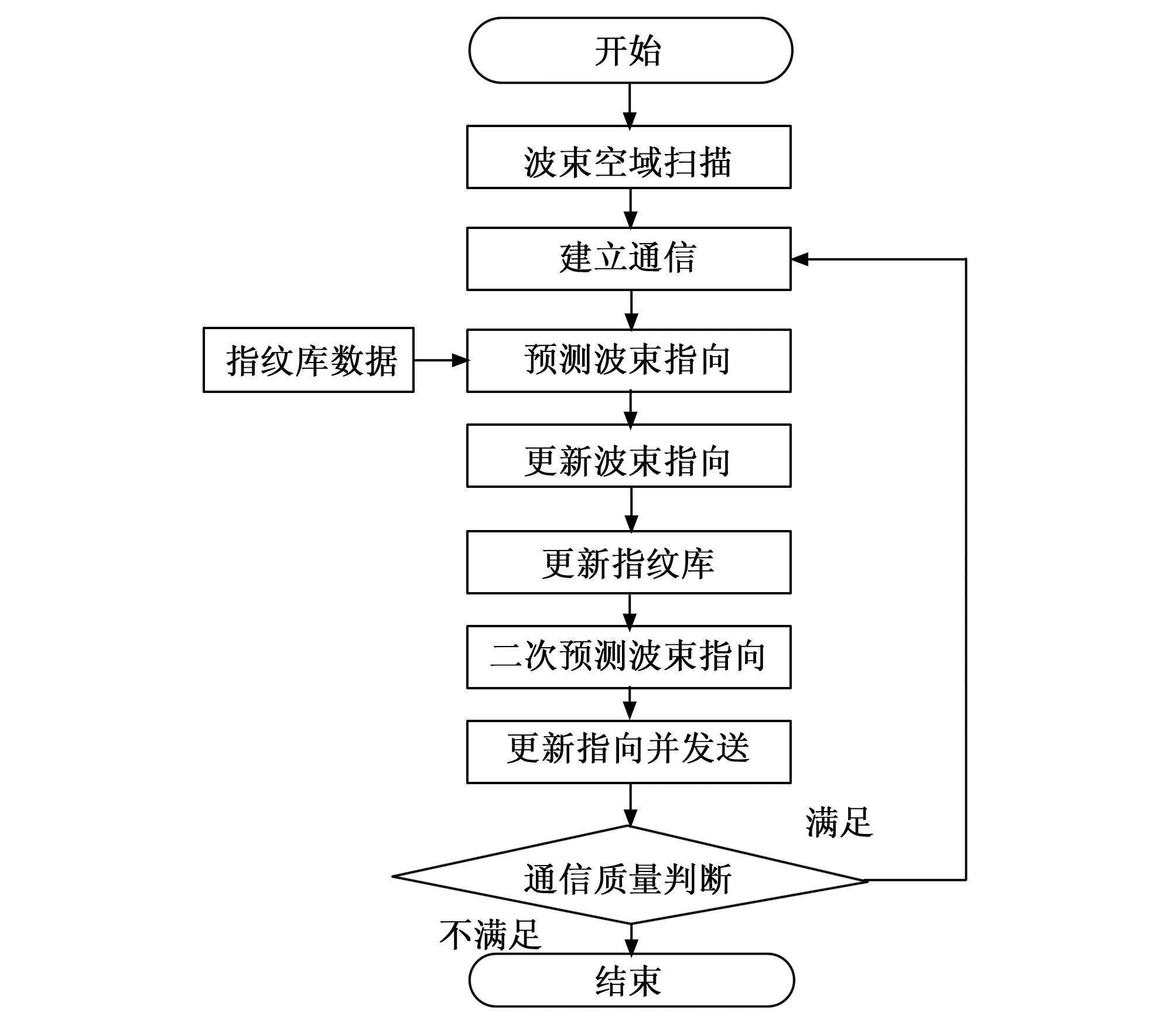
图4 波束跟踪算法流程
1)设置初始化变量:
X0|0=E[X0]P0|0=Q
(28)
2)预测波束指向:
Xk|k-1=FkXk-1/k-1
(29)
3)基于单形采样对状态值进行采样:
(30)
4)计算均值和协方差矩阵:
利用采样权值计算状态向量的均值和协方差矩阵:
(31)
(32)
利用预测状态向量通过波束成形原理计算预测接收信号zk|k-1:
zk|k-1=HkXk|k-1
(33)
利用采样权值计算预测接收信号的均值和协方差矩阵:
(34)
(35)
(36)
5)更新预测值、计算当前时刻的卡尔曼增益和协方差矩阵Pk:
(37)
6)基于数据库,更新补偿:
(38)
(39)
通过更新补偿后的协方差矩阵计算自适应比例因子,调节采样比例,达到采样数据集中在期望范围内的目的。
(40)
7)对更新补偿后的权值重复2)~5)进行二次补偿后的预测更新,并完成一次波束跟踪。
4 仿真与分析
4.1 仿真参数设置
本次模拟仿真的通信节点双方均为16×16阵元的均匀相控阵天线,相控阵天线的阵元间距为半倍波长,可以得出半波束宽度为3°,初始相控阵波束指向方位角和俯仰角均为15°。
设置仿真环境:设定本次实验的系统噪声误差的均方差为1.5°;观测信号误差的均方差为0.15,用来反映接收信号的准确度;无人机姿态传感器误差的均方差为0.75°;总的跟踪时隙为100次。
本节对改进的波束跟踪算法在两种模拟轨迹状态下进行了仿真,并将其与UKF[13]、AUKF[14]算法进行对比。本次实验数据进行了3 000次仿真,结果取均值进行对比,具体仿真参数如表1所示。
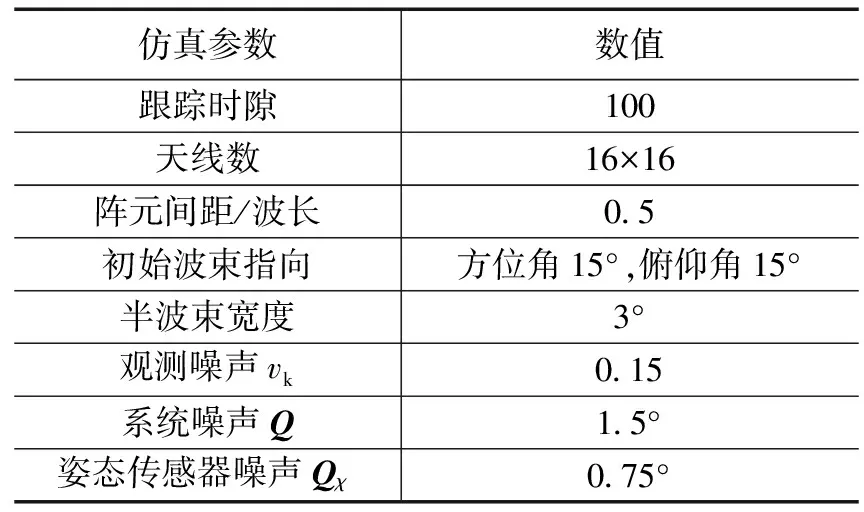
表1 波束跟踪算法仿真参数
4.2 仿真结果分析
本次仿真为无人机上升阶段过程的算法仿真图,方位角变化幅度小,俯仰角变化速率大,每个时隙的俯仰角变化超出1.5°。当波束跟踪误差超出3 dB半波束宽度时,通信功率过低,判定跟踪失败,无法通信;未超过半波束宽度判定通信成功。
在轨迹一、100个时隙下,各算法与实际俯仰角角度的对比和误差对比如图5所示,图中虚线部分为判断通信质量是否满足需求的波束宽度。在系统噪声为1.5°的情况下,俯仰角变化幅度大,UKF在第8次跟踪时便超出跟踪阈值,AUKF在第14次超出跟踪阈值。在跟踪过程中,跟踪误差会随时隙进行累积,不及时对已有信息进行更新和对状态向量补偿,误差的累积会迅速超出通信质量要求的范围。而本文利用指纹库的数据对均值和协方差矩阵不断进行更新补偿,并将对方数据更新状态转移矩阵,完成对指纹库的更新,在100次时隙内,误差仍不超过半波束宽度,保持通信。如图6、图7所示,在轨迹一、100个时隙下,各算法与实际方位角角度的对比和误差对比示意图在上升阶段无人机方位角变化小,各算法的跟踪误差均在理想范围内,满足通信需求。
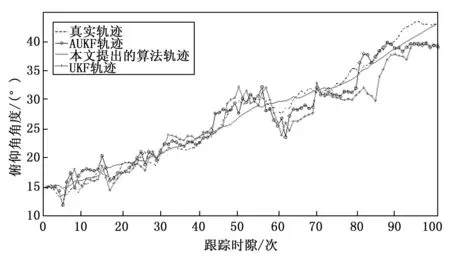
图5 轨迹一俯仰角变化示意图
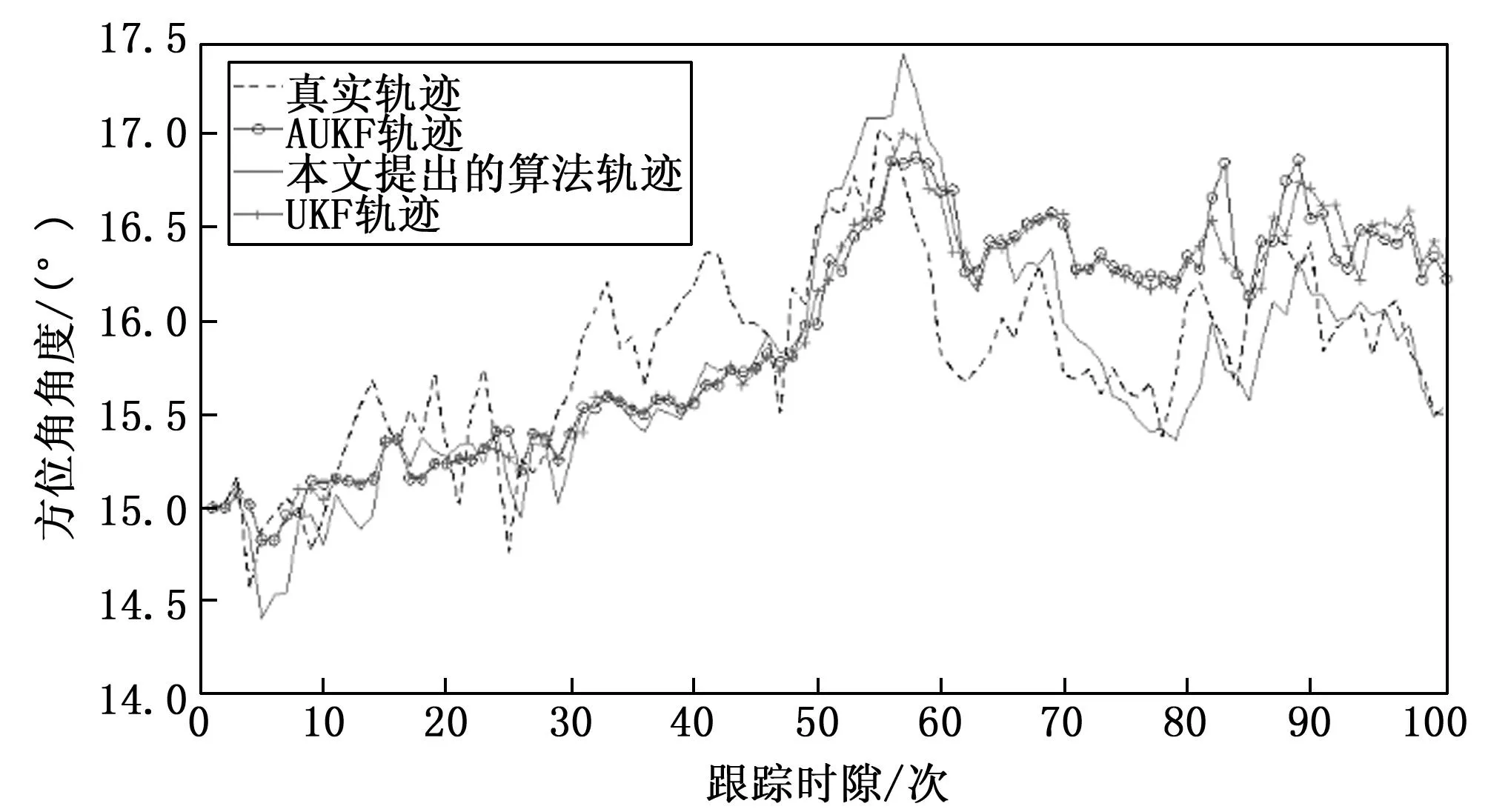
图6 轨迹一方位角变化示意图

图7 轨迹一跟踪误差示意图
通过对比可以得出,目前已有的算法无法满足无人机在角度发生大幅变化且噪声较大的环境,适用于较为理想的条件下使用。本文提出的算法可以更好地满足实际飞行环境。
本次仿真为无人机直飞转向过程的算法仿真图,方位角变化幅度大,俯仰角变化速率相对平稳。
如图8、9所示,轨迹二、100个时隙下,各算法与实际俯仰角角度的对比和误差对比示意图,此时无人机俯仰角相对平稳,误差较为稳定,但随着跟踪时隙的变化,UKF和AUKF算法的误差逐步逼近3°临界值,本文提出的算法会基于指纹库数据获取更新,误差范围稳定。如图9、10所示,为轨迹二各算法与实际方位角角度的对比和误差对比示意图,在无人机方位角发生剧烈改变时,UKF在第17个时隙,误差出现超出3°,而在50次之后,方位角发生快速变化,误差大幅超出3°,无法进行波束跟踪。AUKF在第40次出现跟踪失败,并后续在60次之后出现大的误差导致跟踪失败,本文提出的算法跟踪效果明显得到提升,在82次出现通信失败,但最大误差为5°,在有效跟踪时间上,性能提升了37%以上。

图8 迹二俯仰角变化示意图

图9 轨迹二跟踪误差示意图

图10 轨迹二方位角变化示意图
综合分析轨迹一和轨迹二的跟踪对比可知,相控阵本身在俯仰角上的耦合问题和计算姿态时坐标转换,无人机自身俯仰角误差较大的问题,使得俯仰角在波束跟踪时难度大于方位角。即使在轨迹二俯仰角较为平缓的情况下,误差的累积还是较为明显。
为防止仿真结果的偶然性,对两种轨迹进行蒙特卡洛模拟进行了3 000次仿真测试。表2为算法的平均计算时间,在计算时间上UKF算法最快,但跟踪误差最大,不能满足有效的波束跟踪。相较于AUKF算法,本文提出的算法采用了比例修正的单形采样策略,Sigma采样点数量减少了n-1个,而计算复杂度与采样点数量呈指数关系,采样点的减少大大节约了计算时间,为后续更新补偿算法提供了计算空间。在计算时间没有增加的情况下,本文算法的跟踪性能得到了大幅提升。
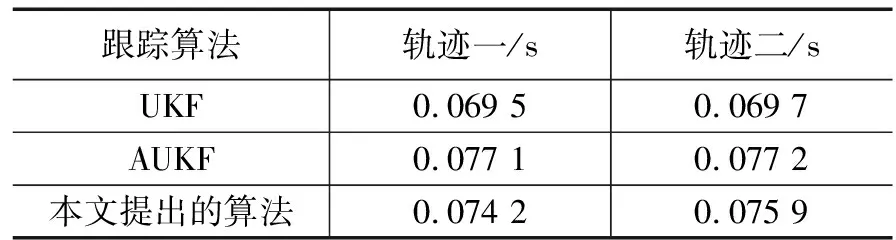
表2 平均计算时间对比 s
波束跟踪算法在100个采样时隙中成功通信的次数如表3所示。在轨迹一飞机起飞的环境条件下,UKF算法成功率为87.21%,AUKF为91.33%,本文提出的算法成功率最高,为97.54%。而在轨迹二的环境下,UKF算法成功率仅有81.26%,AUKF为84.42%,本文提出的算法有92.27%。对无人机的指纹库信息不断更新,对状态向量进行补偿可以很大程度地降低跟踪误差的累积,增加通信成功率,从而满足实际应用。

表3 不同跟踪算法的通信成功率对比 %
综上所述:本文提出的算法在不同轨迹下均可以保证92%以上的通信成功率,且在轨迹二复杂环境下,提升了8%,验证了算法的稳定性。
5 结束语
实现无人机在卫星拒止环境下的波束跟踪和对准,达到稳定通信的目的,是目前亟须解决的难题。本文提出了一种基于卡尔曼滤波的指纹库更新补偿算法,通过卡尔曼对无人机姿态信息进行更新校准,建立更新后载体坐标系,为波束指向建立更加准备的坐标信息;然后利用单形采样策略的无迹卡尔曼算法预测波束指向,实现对非线性系统函数的近似。融合指纹库信息更新并补偿波束指向,补偿无人机在飞行途中,轨迹与预定轨迹发生偏差带来的角度误差,减少随着时隙带来的误差累积,完成波束跟踪。通过仿真分析可知,算法的稳定性和跟踪精度上具有很大的优势,在多种场景下仍具有很好的跟踪性能。
在工程实现上,考虑了无人机姿态信息,和飞行状态在不断改变时,需要通过指纹库更新补偿状态信息,具有更好的参考价值。在后续研究中,应在保持精度的同时,进一步降低算法复杂度,为工程实现的功耗问题提供解决办法,并结合不同场景完成针对性跟踪算法设计。
