基于机器视觉的变电站一体化安防管控系统设计
2024-02-29马洪波邱凯义
马洪波,邱凯义,刘 洁
(1.国网信息通信产业集团 北京分公司,北京 100052;2.华北电力大学 控制与计算机工程学院,河北 保定 071003)
0 引言
变电站作为智能输电的重要区域,其区域安全十分重要,随着数字科技水平的不断发展,变电站的安全防护也在逐渐朝着科技化、智能化发展,实施着无人看守式的视频设备管控模式。传统的安防管控系统设计方案,往往是单一化模块工作安防措施,在实际应用过程中误报率相对较高,无法达到各个模块协同作业的效果,危险入侵定位精度较差。
对于变电站安防系统的不断优化研究,一些学者提出了不同的解决方法:丁晓强[1]研究出一种针对火电危险情况的安防系统,针对火电的特征情况,综合分析总结火电相关单位的反恐经验,设计出可处理多任务的安全防控系统;陈斌等人[2]研究了一种三维建模系统,通过三维建模完成变电站单体设备和环境的映射,在辅助控制子系统基础上连接插件接口以及数据间的传输交互,形成智能监控和报警联控模式。但这些方法在系统响应能力上略差,系统的耐久性不够。
本文在研究变电站安防管控系统时,结合多种安全防控硬件设备,通过网络完成设备间的连接和有效通信,实现安防管控一体化,符合自主性安防监控和人工处置两个管控方向,智能管控变电站周界安全防护,具备线上线下警视联动优势,安装智能门禁识别分系统,有效管控变电站出入人员及记录,形成多方位的安防管控系统。
1 变电站一体化安防管控系统整体结构
在设计变电站一体化安防管控系统时,考虑到机器视觉的电量关系,在设置变电站前端现场的视觉监控设备时,主要依据变电站实际情况安装相应数量的高清摄影机和红外烟雾报警器[3],使高清摄像机与硬盘录像机相连,单个硬盘录像机可与最多16个摄影机实现同步连接,且能够直接与交换机相连完成作业,针对变电站对于温度、湿度以及电流电量等相关参数的安防问题,本文设计采用数据分析采集器[4]、温度湿度传感器以及电量传感器,实现防控监测数据的收集和传输,具体的数据采集系统结构如图1所示。
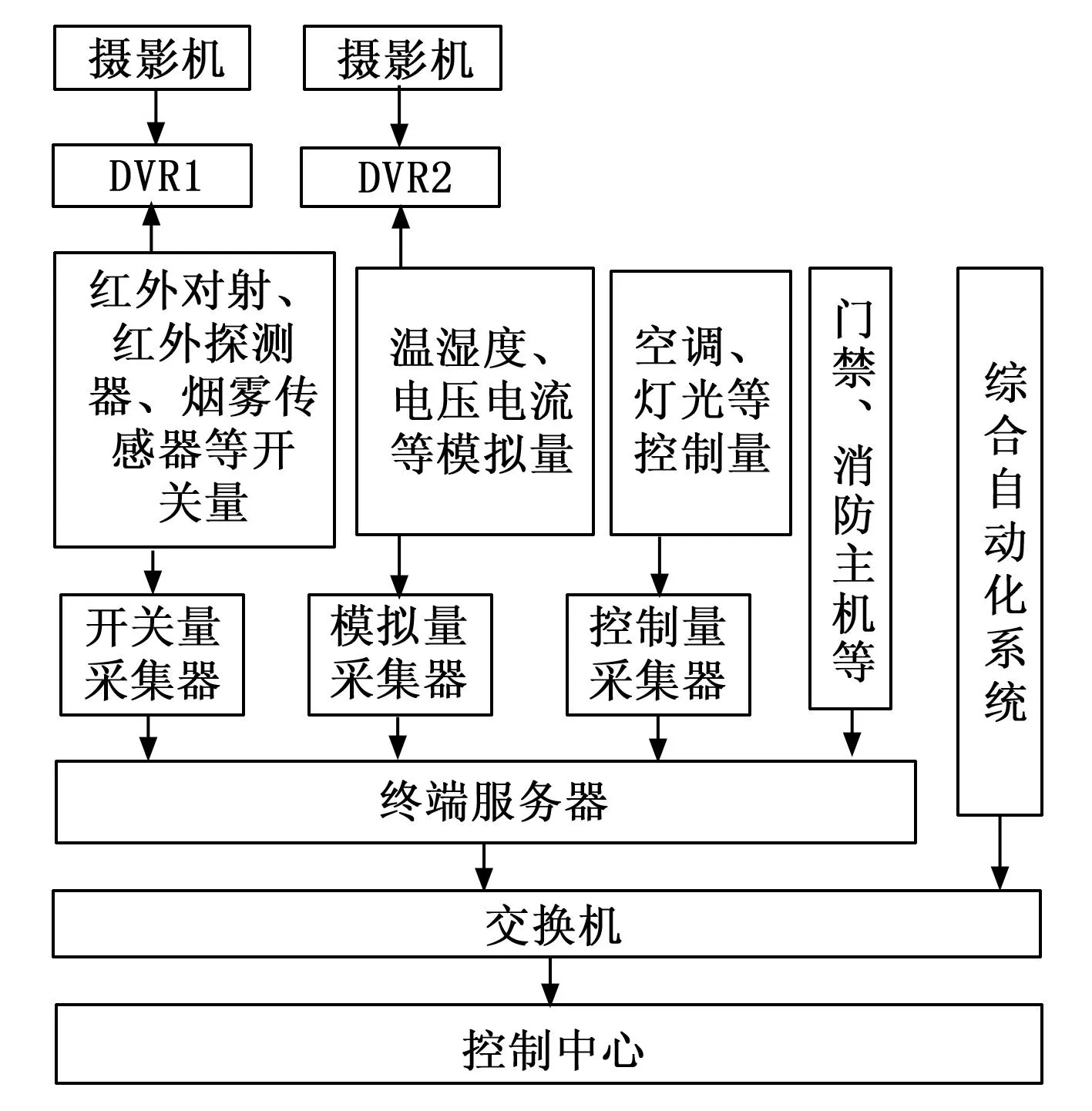
图1 安防监测数据采集系统结构
变电站安防管控系统主要通过高清摄影机的机器视觉效果获取图像信号,并经由计算网络转换成数字信号传输给目标监控终端,网络覆盖面积较大的情况下不会受到地域环境的限制[5]。在计算机网络铺设网络内,利用标准的TCP/IP网络协议,获取的数字视频信号在传输机制作用下可以实现多网并一网[6]。电力公司针对变电站整体的调度中心配置一台中心主控监控服务器,并在服务器内安装主控管理软件[7],目的是统一化管理变电站前端安装的所有摄影机以及视频服务器,并监管服务管理后台所有登录用户的权限,相关的管理人员可以通过安全授权,登录浏览器实时访问中心主控服务器,安全监管变电站前段摄影机获取画面和数据。安防管控系统的网络架构主要包括变电站的实时监控现场、数据传输网络以及调度监管中心[8]。
2 系统软硬件设计
2.1 核心控制系统硬件
在变电所周边环境中设置了一个现场监控控制器,它是整个系统硬件的一个前端控制中心,它的作用是探测到变电站的安全威胁,并接受由激光栅栏报警,并实时控制栅栏、探照灯、语音报警等工作模块,现场控制器需要保证与中间控制器之间的无线传感器通信正常,系统硬件中包含STC89C52单片机、探照灯、激光围栏,并在此基础上添加智能语音报警模块[9],当变电站外围设立的激光围栏被恶意入侵的情况下,激光围栏会实时采集入侵信息,通过系统的激光围栏控制模块和无线传感器通信模块实现安全防控监测和警报。
当现场存在恶意事件,连接门电路和外部环境的终端电子,通过二者之间的协同作业,可以有效完成检测激光电子围栏的入侵。在电子围栏处于安全无入侵状态下,激光围栏发射出的高电平电子信号不会被单片机外部检测终端触碰[10]。若是电子围栏一旦被入侵,被危险入侵的所属围栏部分,则会发出频率较低的电平信号,电平信号经过系统中的非门74LS30和三极管部分,在综合作用下使低电平信号触发到单片机,此时单片机受到触碰后进入到外部中断状态,单片机快速状态检测所有的激光电子围栏P1接口,通过序列巡检后确定危险入侵围栏对应的编号,通过比对围栏编号和安装信息最终确定危险入侵激光围栏的具体位置[11]。
机器视觉硬件部分的组成主要依靠高清模拟摄影机、数字转换摄影机和网络传输摄影机组成,高清模拟摄影机利用模拟通讯信号完成图像采集传输,但由于其比较容易受到变电站的强电磁影响,因此在考虑机器视觉稳定性的前提下,利用数字转换摄影机与后端网络设备相连,实现机器视觉抗干扰能力的增强,通过网络传输摄影机可以实现强有力的联网效应[12]。选用DS-2DE7174智能球形摄影机作为变电站一体化安防管控系统的视觉硬件机器,选用机器不仅具备夜视能力,同时可实现云台稳定拍摄,其自身具备的集成网络服务器能够辅助其他客户端完成远程控制和访问。
为了保证摄影机拍摄变电站周围安全环境的视频能够实时完成传输,利用以太网覆盖变电站及周边安全范围,并通过网络路由器辅助多个摄影机之间的连接,调整拍摄角度和摄影机存储IP地址的分配,网路路由器与摄影机间的连接端口完成相关映射[13],并且网络路由器通过TCP/IP协议与上位机连接,移动设备通过互联网与网络路由器连接,可以有效提高远程设备远程访问摄影机的效率。
2.2 系统软件设计
变电站一体化安防管控系统的软件部分,首先考虑激光电子围栏受到危险入侵的信号检测问题,同时软件部分必须满足控制语音报警模块、电子围栏、检测报警信号、探照灯、控制无线传感器网络等众多模块的需求。在现场控制装置上电后,首先启动电子栅栏、激光栅栏以及探照灯,调动语音报警模块,通过控制无线传感器网络的连接,网络成功接入后,其进入循环睡眠状态[14],当变电站周围环境被危险入侵时,系统收到信号触碰后,切断设备,随后由现场控制器相连组成无线传感器网络报警框并发出警报,每一条信号的数据帧完成传输后,会开始一个超时的响应帧[15],若超过规定时间还没有准确接收到信号响应帧,首先认定报警帧丢失或是存在错误报警帧,此时需要重新发送新的警报帧。响应帧的应答回复次数为3次,若是超过次数仍未能应答,安防管控系统将会重新启动。该模块通过中断模式来检测告警信号,通过中断处理器标记对应的报警位置。
变电站安防管控系统建立于智能视频监控的基础上,有效地智能处理机器视觉下获得的安防视频,并且要素类型定义视频流,通过制定相应的分类规则并建立视频智能判断模型,能够实现视频流的深度分析、理解和效果评估,高效监测变电站内部和外部周围环境的安全,利用智能模型判断触发型安全事件并实时提供语音报警功能,可实现自主性安防监控和人工处置两个管控方向,安防系统功能包括危险因素自动识别警报、动态物体监测、火苗、烟雾、气体、水流等各种实际情况的危险识别和预警。具体的安防管控一体化系统组成如图2所示。
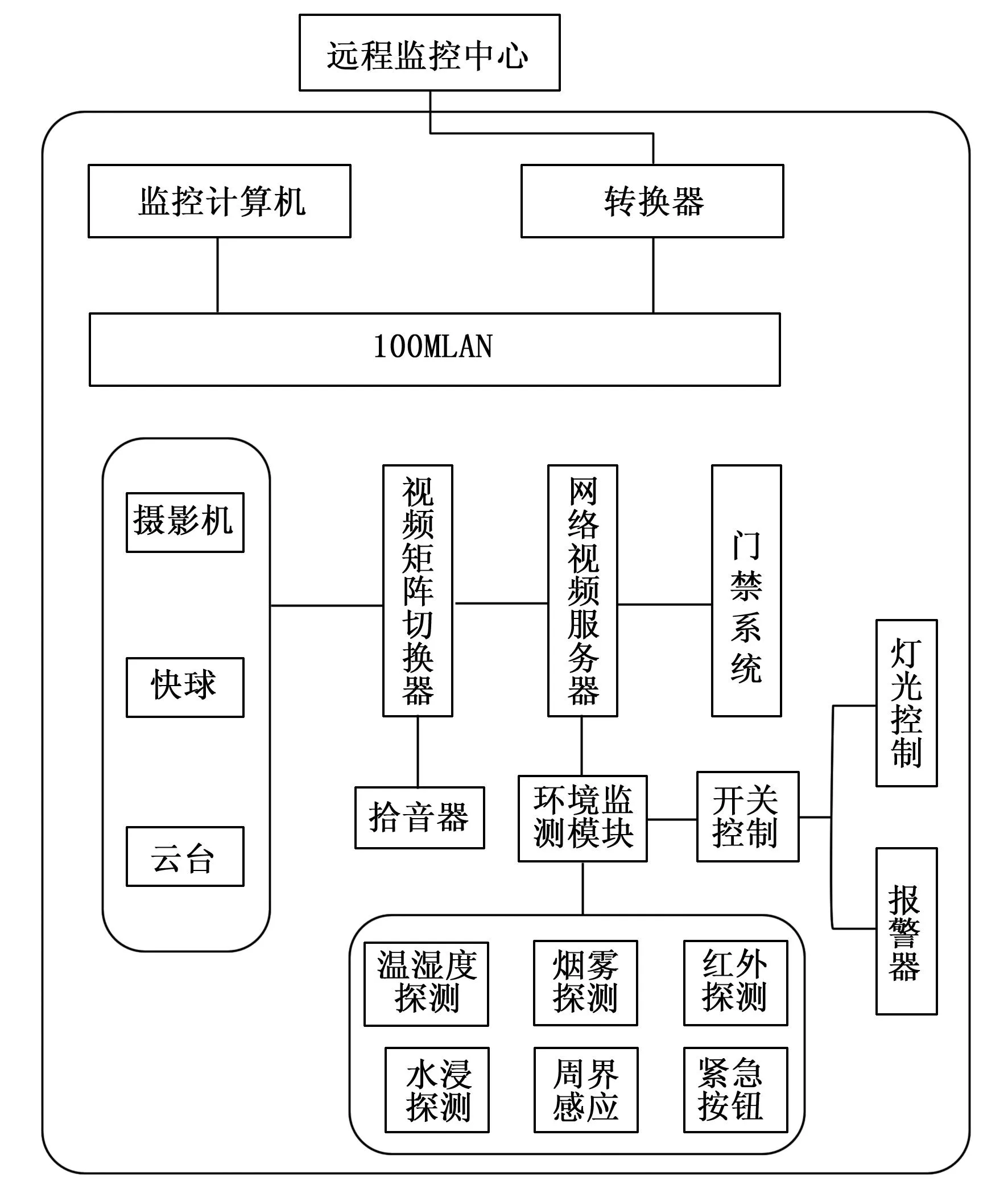
图2 变电站一体化安防管控系统结构
为了降低变电站安防管控系统中激光电子围栏的误报警率,提高围栏对危险入侵的预判以及精准定位性能,在此基础上提高视频安防监控的信息密度,电厂周界防护在激光电子围栏的作用下,采用激光栅格定位检测危险入侵的具体位置点,并实时阻拦,发送警报并使用通用分组无线电业务实现信息控制,无线网络可以实现远程警报和视频图像远程控制,实现变电站周围环境安全防护管理的智能控制系统。
安防管控系统分为前段监控和后段管控两个独立的分层结构,前段视频监控结构主要负责针对变电站周围环境的危险入侵检测,警报信息威慑及入侵取证等相关前期工作,后段的管控部分则显示、储存危险入侵报警信息,针对报警详细信息控制前段摄影机,通过网络控制警报系统并处理入侵情况。
系统安防管控系统设置联动报警感知技术,通过计算机技术评估入侵事件危险程度及性质,利用通信技术识别非法入侵变电站防范区的行为并予以语音告警,通过联防技术结合变电站的监控图像及视频与声光报警装置,针对性实现防火防盗等多方位的安全防控功能,在红外、超声波等物理技术的辅助下,有效判断敏感事件的发生并作出报警决策,线下手机终端同样可以接收到远程监控视频及警报信息,实现线上线下警视联动的可控化安防管控。
通常情况下,对于变电站而言,经常发生也是概率最大的危险事件即为火灾及非法入侵,因此,系统选用了相应的穿线传感器探测周边环境实施异常情况,一旦发生异常被传感器检测到即可触发警报功能,此时与警报器线路相连的视频监控开启自动定位系统,自动记录警报位置异常情况,实时分析视频采集内容,方便信息关联和定位,第一时间掌握事故现场信息并完成事故根源追溯。
变电站的安全防控必不可少的是门禁管理,在安防管控系统内装置入门智能识别分系统,智能监控来往人员,利用智能门禁卡、电子密码控制人员流动,为提高变电站智能性和安全性,采用虹膜、人脸以及指纹等多种识别方式,在此基础上完成人流出入状态记录。
由于变电站处于昼夜长时间工作状态,因此保证变电站内各项重要设备的安全运行及电路稳定是十分必要的,在一体化的安防管控系统下,管理人员的日常不定期巡视检查也是必不可少,由此形成链条式多方位的系统及人员管理方案。
3 视觉识别定位算法设计
安全区域内需要依靠机器人完成视觉巡查,其对移动目标轨迹的定位很关键,因此,可将变电站寻物机器人对移动目标轨迹跟踪看作机器人角速度的控制。计算得出的理想轨迹和机器人动态轨迹,移动轨迹跟踪控制模块采用基于模糊神经网络PID控制方法,实现变电站寻物机器人移动轨迹跟踪控制。
该控制方法主要是对理想轨迹和机器人动态轨迹之间的误差实行控制,在控制过程中,通过线性二次型调节器(LQR)算法对机器人期望位姿q=(xr,yr,θr)和实际位姿qr=(xe,ye,θe)之间的耦合关系实行解耦处理后,将获取的两者的解耦量X′(t),作为模糊神经网络PID的输入,通过该网络的运算输出机器人角速度控制量ym,依据该控制量对机器人的驱动轮转速实行控制,以此改变机器人移动时的角速度,实现机器人按照规划的理想轨迹移动,完成机器人移动轨迹跟踪。
LQR算法在进行解耦过程中,仅依据与机器人角速度存在关联的因素完成,文中主要为横向和航向两种偏差因素。将机器人理想轨迹和动态轨迹之间的偏差角以及偏差角的变化率输入模糊神经网络PID中,输出结果为PID的比例系数、积分和微分两种时间常数3个参数,分别用KP、TI、TD表示。PID的公式为:
(1)
式中,PID在t时刻的输出用u(t)表示,也就是机器人的角速度控制量,机器人期望位姿和实际位姿偏差解耦后的输出量用X′(t)表示。
为保证PID的跟踪控制效果,采用Mandani推理模糊神经网络对PID实行优化,该优化是以u(t)的大小为依据,实现KP、TI、TD三个参数的自适应调节。模糊神经网络PID的机器人轨迹跟踪控制方法共由5层结构组成,详情如下:
第一层:输入层输入u(t)。
第二层:输入模糊化层:对u(t)实行模糊化处理,计算机器人期望轨迹和实际轨迹间的偏差角u(t)对于变量值模糊集合的隶属度。采用高斯函数表示隶属度函数,其计算公式为:
(2)
式中,隶属度函数中心和宽度分别用wij和cij表示。
第三层和第四层均为模糊推理层:其用于计算各条机器人移动轨迹跟踪控制规则的适用度ak以及ak的归一化处理,其公式分别为:
(3)
(4)
第五层为输出层:实现模糊值的清晰化处理,输出机器人移动轨迹跟踪控制结果,其计算公式为:
(5)

4 仿真实验
4.1 实验准备
为了深度验证所研究的变电站安防管控系统具体性能,利用X-CTU测试软件针对无线传感器网络模块下,网络系统内信号的传输准确概率和无线传感网络信号强度进行实验测试,检测系统的网络传输环境是否良好,为了保证实验结果真实准确,延长实验测试周期至10 d,取实验测试数据的平均值作为最终结果。实验过程以某变电站为研究对象,系统在Windows 11系统下进行,开发平台为Visual Studio 2017,编程采用C++软件,系统通信采用TCP/IP协议。基于机器视觉,并且为了保障实验过程中系统的效果,采用了Open CV开源计算机视觉库和系统的机器视觉采集的图像输入视觉库,系统的图像输出也由该视觉库输出实现,并且在该过程中,将视觉图像数据保存至Mat数据结构。实验过程电脑配置为i9-12900H的CPU,内存容量为16 GB,显存容量为6 GB,512 G的固态硬盘,实现系统的机器视觉等硬件信息如表1所示。
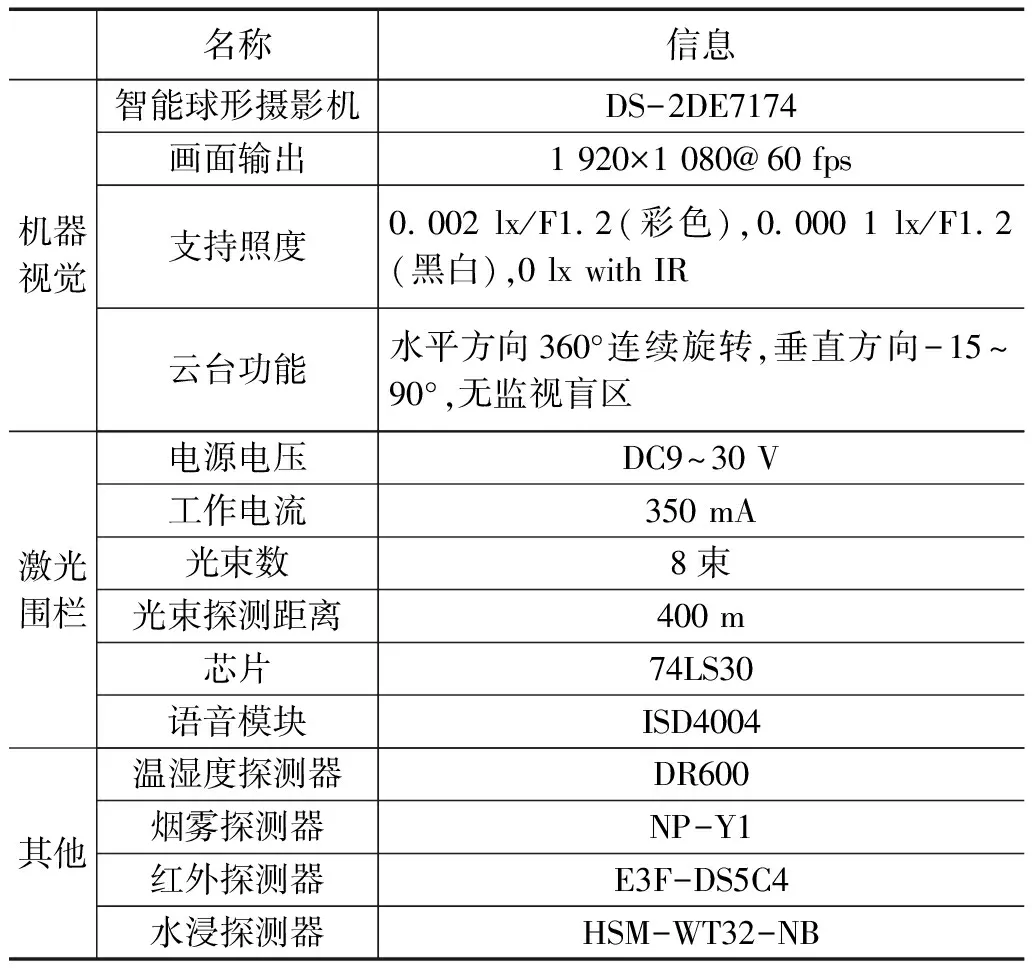
表1 实验硬件信息
通过上述硬件设备实现具备机器视觉的变电站一体化安防管控系统功能。
4.2 系统功能测试
为了避免因为系统自身的因素影响实验结果,在开始实验前,测试基于机器视觉的变电站一体化安防管控系统的功能是否正常,在完成系统构建后,测试系统功能的结果如表2所示。

表2 系统功能测试
在测试过程中,基于机器视觉的变电站一体化安防管控系统功能均匀运行正常,如系统可以有效采集机器视觉图像(如图3)等,通过机器视觉可以实现变电站一体化安防管控。
图3 系统通过机器视觉采集的图像
4.3 结果分析
首先测试电站一体化安防管控系统的温度监测效果,如果有效监测出了变电站存在较高的温度,并且检测温度与实际温度一致,则表明系统的温度监测效果较好,并与火电安防系统和三维建模系统进行性能对比。实际变电站温度较高的位置如图4所示(设备的温度为多个仪器测量结果的均值)。
图4中的黑色十字为高温位置。以图4为基础,对比分析3种系统的温度监测效果,实验结果如图5所示。
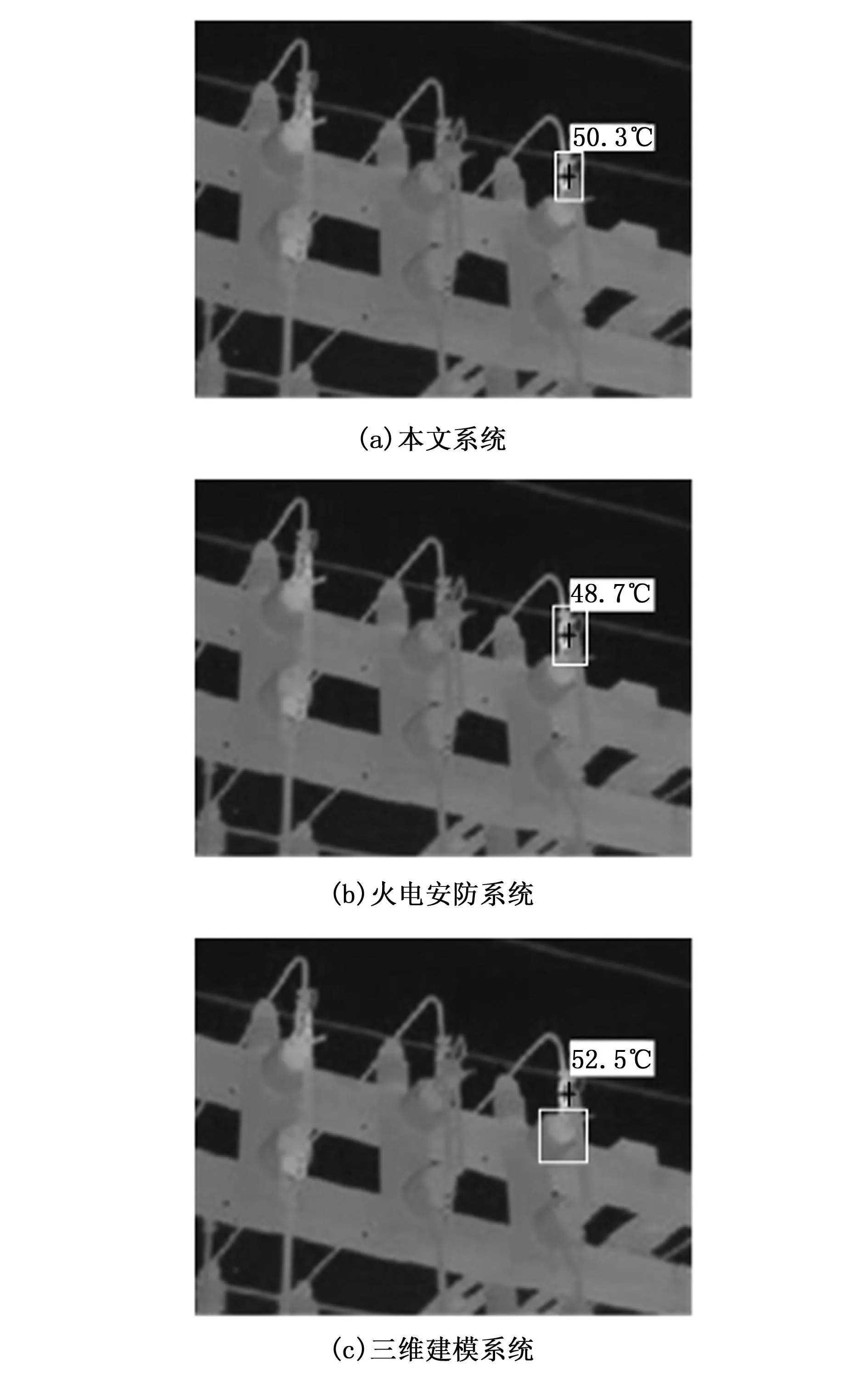
图5 变电站温度视觉监测结果
通过图5的变电站温度监测结果可知,本文系统有效准确地监测到了变电站内温度较高的设备位置,其监测位置与实际位置一致,并且监测到的温度与实际温度一致,均为50.3 ℃,而火电安防系统虽然监测到了高温位置,但是其监测的温度与实际温度不一致,该监测温度仅为48.7 ℃,比实际温度低了1.6 ℃,三维建模系统监测到的高温位置与实际位置存在一定的误差,其监测的位置较实际位置偏下,并且监测的温度较高,高出实际温度2.2 ℃,由此可知,本文方法可有效且准确监测变电站温度,其监测结果的准确性高于对比系统,验证了本文系统具备更高的应用价值。
在完成电站一体化安防管控系统机器视觉的温度监测测试后,设置无线传感器网络每个传输节点之间的固定距离为100 m,在不同的时间节点下测量信号强度和实际的传输准确率数据,具体实验结果如图6所示。
从图6中可以看出,在无线传感器网络传输节点距离固定的情况下,安防管控系统的信号强度不会随着时间节点的不同而发生变化,但系统网络信号的传输准确率会受到不同用电时间节点的影响,产生小幅度的波动变短,但整体的安防信息传输准确率保持在95%以上,准安防信息传输确率较高。
为深度认证构建的网络系统传输是否稳定可靠,设置实验中网络传输时间节点为5:00,设置网络传输节点间的距离为变量,测试系统网络的信号传输强度和实际传输准确率数据,绘制真实的实验结果成曲线,如图7所示。
根据图7可知,随着系统无线网络传输节点间在逐渐增加的过程中,安防信息信号的传输准确率几乎并没有受到影响,说明网络节点距离的设置对信号传输准确并不造成影响,而安防信号的实际强度则随着节点距离的增加在不断被削弱,证明节点距离与安防信号的强弱有关,综合图6和7的实验结果可以总结出,在变电站强电磁场环境中,系统的无线传感器网络可以有效、稳定地保证安防信息的正常通信,安防信号传输环境可靠。
接下来实验选择变电站较易发生的火灾情况进行模拟,由于火灾发生前大多会伴随大量的烟雾,以及周围环境温度的升高,因此这里主要验证本文研究系统对火灾的预警能力,并通过与火电安防系统和三维建模系统进行性能对比,具体实验结果如图8所示。

图8 3种方法火灾预警能力对比
根据图8可知,火电安防系统在火灾概率为70%时能够触发安防警报,三维建模系统的安防警报触发条件为火灾概率在85%时,此时火灾发生的概率非常大,证明上述两种系统对火灾发生的预警能力实时性和预知性较差,而本文研究的安防系统在火灾发生概率为50%时即可有效检测出危险情况,并触发警报,提醒变电站相关安全人员有效预防火灾的发生和大面积蔓延,减少损失,证明所研究系统的预警能力较好。
安防管理系统不仅要能够有效监测出变电站周围的安全状况,系统的响应性能同样重要,以免发生前端系统完成实时监测,但后端处理系统不能有效响应的问题,因此系统的反应速度非常重要,这里对不同的安防管控系统后台的响应情况进行一次对比实验,通过数据模拟较常发生的安全威胁状况,建立50个模拟实验数据,投入模拟数据到本文研究系统、火电安防系统和三维建模系统中,3种系统的响应耗时情况如图9所示。
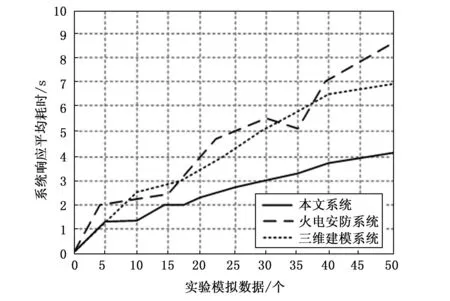
图9 系统响应耗时对比
从图9可以看出,火电安防系统和三维建模系统,随着实验模拟数组数量不断增加的情况下,系统算法的响应平均耗时不断增加,且火电安防系统在耗时的趋势上相对更大,本文研究的安防系统响应耗时相对较短,同时耗时上涨趋势更加平稳,系统的整体响应性能更好,可以为系统使用者提供更好的安防管控判断。
在上述试验的基础上,对本文研究系统、火电安防系统和三维建模系统的能耗情况进行统计,其结果如图10所示。
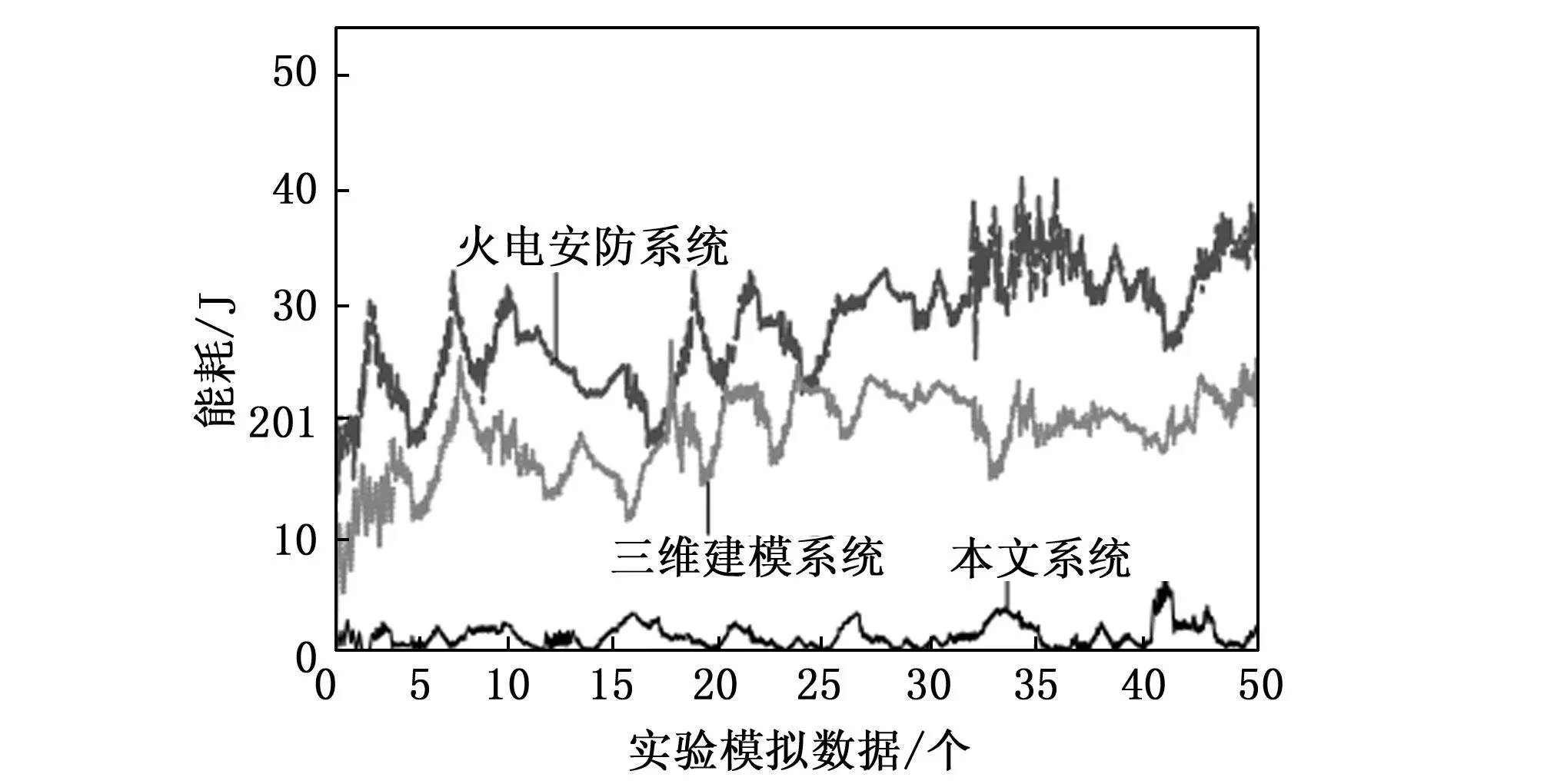
图10 系统能耗对比
从图10可以看出,火电安防系统和三维建模系统,随着实验模拟数组数量的不断增加,其能耗也呈上升趋势,而本文系统的能耗则使用维持在10 J以下,能耗相对稳定。由此说明,本文研究的安防系统不仅响应耗时相对较短,同时能耗较低,系统的整体性能更好,更具有应用性。
5 结束语
本文利用激光围栏作为安防系统前段的防御措施,通过对数据类型的高度转换,利用机器视觉,即摄影机器监控变电站周界,与激光围栏相配合,达到预警和实时定位的效果,经过实验证明,本文研究系统能够达到系统网络的实时信号传输,在无人看守情况下,系统准确监测到了高温设备,同样可以完成对危险信号的检测和预警,系统响应性能好,具有可实用性。
