Z源逆变器高阶微分反馈控制研究
2024-02-29刘松涛王丙元
刘松涛,王丙元
(中国民航大学 电子信息与自动化学院,天津 300300)
0 引言
航空静止变流器(ASI,aeronautic static inverter)作为飞机的二次电源,是飞机上一种关键的电力电子装置。ASI将机载28 VDC直流电转换为400 Hz的115 VAC的中频交流电,为各种机载电子设备提供所需的电力。
为了得到高品质的输出波形,ASI的控制策略也得到了进一步发展。PID控制由于其结构算法简单、参数少、工程实现容易等优点成为使用最为广泛的控制算法。但是随着工业科技的发展,工业设备的器件参数往往会随着时间发生变化,这会导致基于原始系统设计的PID参数不再适用。并且在应用层面常出现时变、非线性等复杂环境,在这种情况下,PID控制的适应能力较差,PID控制下系统的性能表现也会差强人意。
非线性控制的发展使得滑模变结构控制被大量应用在电力电子电路的控制方面,通过在控制系统中引入非线性滑模面,在控制器输出与被控对象输入之间形成一个可控的滑动模态,使得控制系统具有更强的鲁棒性和适应性,能够更好地应对系统参数变化、扰动等问题。
目前ASI大多采用DC/DC/AC两级交换结构[1-3],前级使用DC/DC来实现电压转换,后级使用DC/AC实现逆变及输出。两级ASI的局限性如下:由于采用两级式结构,系统的复杂性变大、效率偏低;后级DC/AC环节所采用的H桥逆变电路不允许同一相桥臂开关器件同时导通因此需要引入死区时间防直通,死区时间的引入使得输出电压波形产生一定程度的畸变[4]。
为了避免桥臂直通问题对系统的影响,Z源拓扑由此被引入到航空变静止变流器的设计中。由于其Z源网络的独特性,系统能在直通状态下正常运行,并且直通状态为Z源逆变器[5]提供了升压功能,因此基于Z源逆变器实现的ASI实现为单级结构,降低了系统复杂性,提高了系统效率。由于Z源逆变器可以在同一相桥臂开关管同时导通的状态下正常工作,因此不存在死区带来的输出电压波形畸变问题,逆变器的可靠性更强。
Z源逆变器控制策略研究是Z源逆变器的一个重要研究内容。文献[6]提出了一种直流链电压控制策略,该控制策略将直通占空比和调制系数作为一个整体,通过间接控制使得系统能快速跟踪给定电压,但该控制策略基于PI控制,快速响应的同时会存在较大超调。文献[7]提出了Z源逆变器的滑模控制器,推导了滑模系数范围,该控制策略虽获得了更好的暂态响应,但调节时间较长。文献[8]提出单相Z源逆变器自适应控制,但克服了因输入电压波动造成输出不稳的问题,但其控制器参数通过分析系统精确数学模型得到,由于Z源逆变器系统阶次较高,因此对精确数学模型的分析也较困难。文献[9-10]分别提出了基于模型预测控制和模糊控制的直流链电压调节的反馈控制策略,改善了系统的暂态性能和抑制干扰能力,但其控制算法复杂,实现不易。文献[11]提出一种基于多功率逼近率的滑模控制方法,可使系统状态快速到达滑模面,取得了良好的控制效果,但是滑模控制容易产生抖振的局限性依然没能得到解决。
在高阶系统的控制领域方面,高阶微分器[12-13](HOD,high-order-differentiator)由于其能实现对系统高阶信息的准确提取而被广泛应用于各类高阶系统的控制策略设计中去。大量学者以高阶微分器(HOD)和基于高阶微分器设计的高阶微分反馈控制(HODFC,high-order differential feedback control)为基础展开了控制策略方面的研究。Li等[14]针对四旋翼无人机控制,将改进的扩展状态观测器与HOD相结合,设计了一个改进的高阶微分反馈控制器(IHODFC),并给出了其闭环稳定性证明。实验结果表明在IHODFC控制方法下四旋翼无人机的性能表现要优于PID和ADRC;Agee等[15-16]针对柔性机械臂控制,将HODFC与经典PID控制作对比实验,结果显示相较PID控制方法,HODFC有很强的抗干扰能力;Ayas等[17-18]在其研究中设计了一种分数阶微分反馈控制器,并将该控制器应用于自动调压器系统,以提升系统的调节能力,研究结果表明,相比于HODFC和PID,该控制器具有更优秀的控制性能。
Z源逆变器系统是一个高阶非最小相位系统,为系统分析及控制器设计带来了很大的困难。传统的控制器设计方法通常需要精确的系统模型和复杂的数学分析,这不利于实际应用中的控制器设计和调试。而HODFC[19]通过HOD估计系统输入和输出的各阶微分信息,并通过极点配置调节控制器参数。该控制器不依赖于系统精确模型,从而实现了模型无关的控制器设计,且鲁棒适应性强,可以有效地抵抗系统参数变化和外部扰动的影响。
1 Z源逆变桥原理及其数学模型
1.1 Z源逆变桥基本原理
单相Z源逆变器的一般电路拓扑结构如图2所示,利用该一级电路转换结构取代了如图1所示的两级结构。Z源逆变器包含一个X型Z源阻抗网络,此网络由两个电感和两个电容交叉组成且具有对称性即L1=L2=L、C1=C2=C,因此Z源逆变器既能工作在传统逆变器的非直通工作状态,也能工作在传统逆变器所禁止的直通状态,并且该状态为Z源逆变器提供了独特的升压功能[5]。

图1 两级式ASI结构框图

图2 单相Z源逆变器电路拓扑
Z源逆变器电路处于工作状态时,设定直通占空比为D,则在一个开关周期T内,电路工作在直通状态下的时间为T0=DT,工作在非直通状态下的时间为T1=(1-D)T。
下面对Z源逆变器的工作方式及升压原理进行进一步分析:
当逆变器工作在非直通状态时,逆变桥上下桥臂没有同时导通,将产生直流链电压,电流流向负载。此时电源向电容充电,等效电路如图3所示[20-21],此时电路电压存在如下关系式:
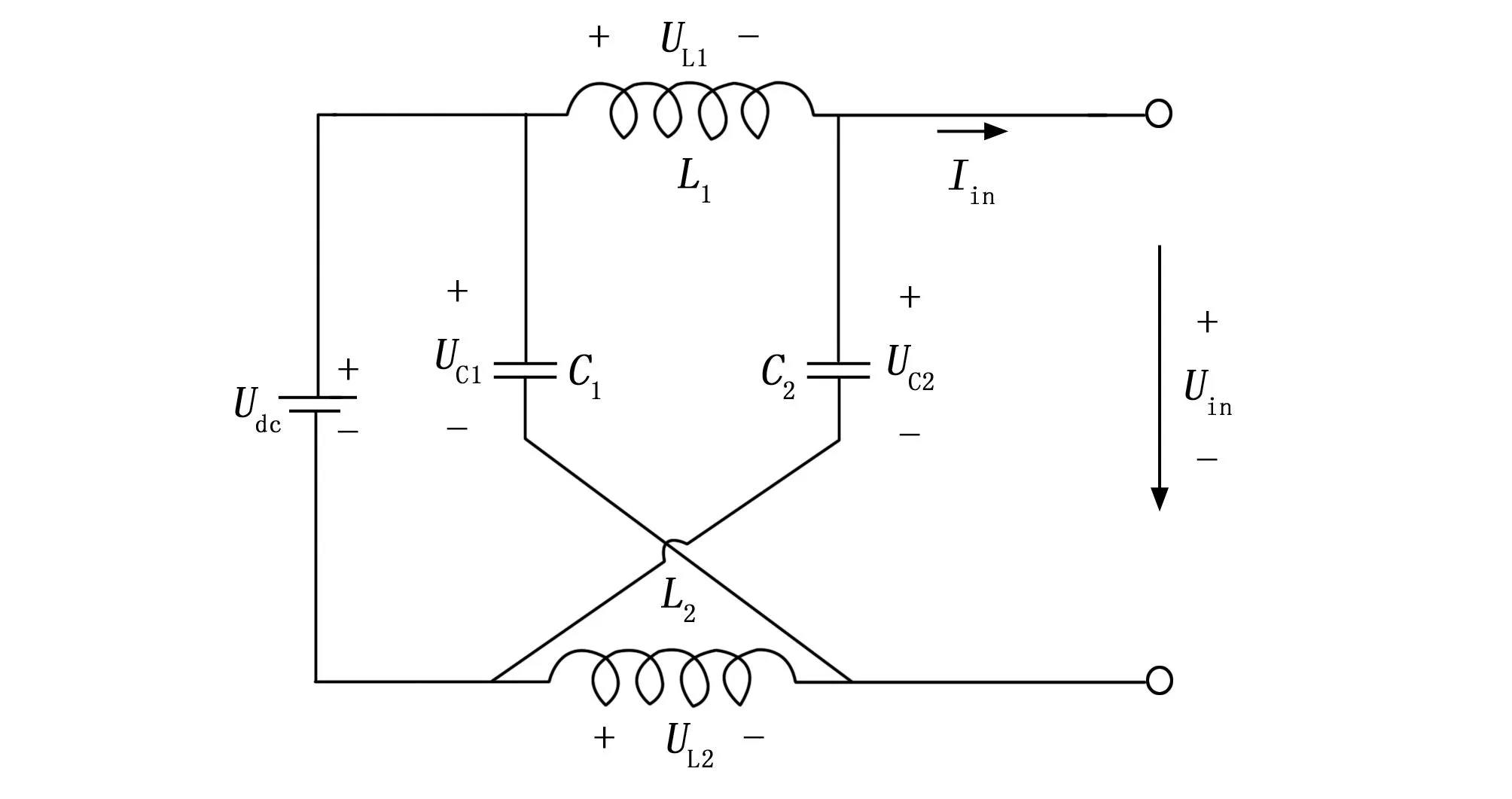
图3 非直通状态等效电路图
Uin=2UC-Udc
(1)
当逆变器工作在直通状态时,上下桥臂同时导通,直流链电压为0,由于受到反向偏置电压的作用,二极管处于截止状态,这使得电路中的电源和Z源网络被隔离开来。在这种情况下,电容开始向电感充电。直通状态时等效电路如图4所示。

图4 直通状态等效电路图
由图4等效电路图可得:
UL1=UL2=UL=UC1=UC2=UC
(2)
Z源网络电容电压与直流输入电压关系[5]为:
(3)
直流链电压与直流输入电压存在如下关系:
(4)
则Z源逆变器的升压因子B为:
(5)
1.2 Z源逆变器数学模型
由图2,选取Z源网络中电感电流iL(t)和电容电压uC(t)作为状态量,构造系统状态方程,利用小信号分析推导出直通占空比到Z源网络电容电压的传递函数为:
(6)
根据逆变桥母线直流电压与电容电压的关系:
(7)
(8)
逆变桥环节可以等效为一个惯性环节,其传递函数为:
(9)
其中:K1为惯性环节增益,τ为时间常数。滤波环节传递函数为:
(10)
Z源逆变器从直通占空比到输出的传递函数为
G(s)=GindG1Gfil
(11)
即:
(12)
其中:
b1=2K1(Iin-2iL)
b0=2K1(1-2D)(UC-Udc)
a5=τLCL3C3
a4=LCL3C3+τLCL3/R
a3=τLC+LCL3/R+τ(1-2D)2L3C3
a2=τ(1-2D)2L3/R+LC+(1-2D)2L3C3
a1=τ(1-2D)2+(1-2D)2L3/R
a0=(1-2D)2
由于式(12)中b1<0、b0>0,根据奈氏判据,其对应的五阶传递函数系统具有非最小相位特性,使得系统控制器设计存在困难。
2 高阶微分器
文献[19]提出一种不依赖于系统精确模型的高阶微分器(HOD),其具有不依赖于系统精确模型的特点,能够提取给定信号的n阶微分信息。HOD的阶次反映了其中使用的积分器数量,阶次越高,使用的积分器数量也越多。当HOD的阶次大于被提取信号的阶次时,HOD可以通过对输入信号进行更多次微分操作来提取更高精度的微分信息。因此,阶次较高的HOD可以更准确地提取输入信号的微分信息。但是,阶次过高也会带来一些问题,例如噪声增益和不稳定性等问题,因此需要根据具体应用场景选择合适的HOD阶次。当HOD的阶次等于被提取信号的阶次时,可以完全提取输入信号中的微分信息。通过调整HOD的阶次,可以控制微分器的精度和频率响应,以实现不同的应用要求。n阶的HOD由动态方程(13)和观测方程(14)两部分组成,其中动态方程描述系统的状态演化,观测方程则反映系统状态与观测量之间的关系,表示如下:
(13)
(14)
根据状态方程和观测方程可以得到n阶HOD框图如图5所示。其中y是待估计信号,x1,x2,…,xn是重构后的系统状态,根据观测方程就可以计算得到y的各阶微分信号估计值[22]。
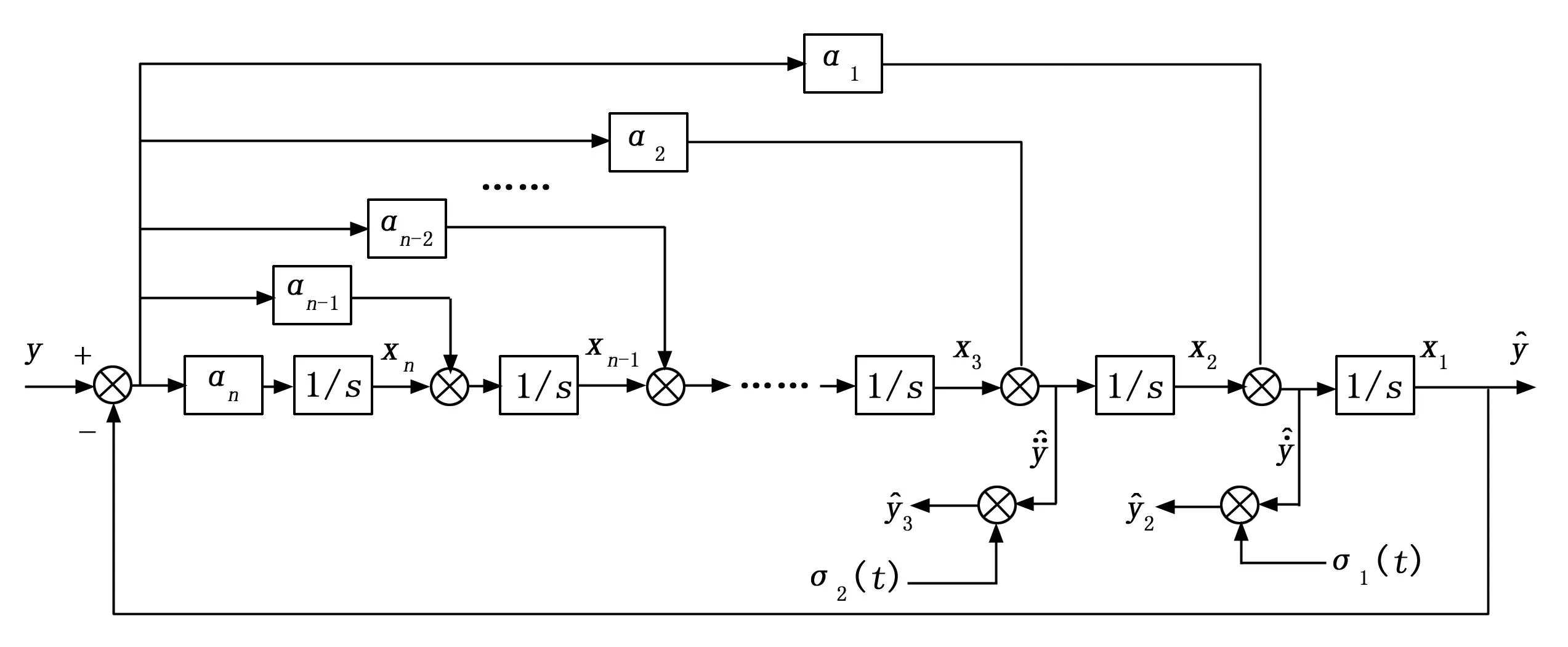
图5 n阶HOD框图
显然,HOD在实现状态估计的过程中仅仅利用了系统输出的可测量信号,因此其具有不依赖系统精确数学模型的特点,具有较好的适应性和实时性。参数ai(i=1,…,n)对整个HOD的稳定起到了至关重要的作用,这些参数需要根据系统的特性进行选择,并且需要保证它们的值不会导致系统的不稳定,可采用根轨迹法进行确定[23]。
通过将动态方程(13)两边取拉氏变换可以得到HOD闭环传递函数:
(15)
进而可以求出其开环传递函数为:
(16)
从图5和式(16)来看,可以发现HOD是一个n阶伺服系统,通过输入可测量信号,可以估计出输入信号的各阶微分信息。当输入信号是一个n阶以内的非周期信号时,HOD可以实现无静差跟踪,即输出的估计信号能够与输入信号完全重合。即便输入信号为周期信号,HOD也能保持较高的跟踪精度。
根据根轨迹法则,在增益选择合理的情况下,只要开环零点全部位于s左半平面,闭环系统的极点也会全部位于s左半平面。为了简化HOD设计,我们设定其所有的开环零点为一个相等的负实数-a,则式(16)可表示为:
(17)
系统的特征方程为:
sn+K(s+a)n-1=0
(18)
可求得系统根轨迹的分离点为s1=-na,s2=0。
选取s=-na作为分离点。由闭环极点和根轨迹幅值条件可得到下式:
(19)
将开环零点zj=-a,开环极点pi=0代入式(19)得:
(20)
结合式(16)、(17)、(20)可得:
(21)
由上式可知,利用根轨迹法所设计完成的HOD只涉及到一个参数a,a的值越大,跟踪和提取信号的精度就越高,但需要注意的是,当a取值过大时,频带越宽,响应速度越快,但稳态抗干扰能力会变差,且HOD容易产生由初始误差或扰动带来的脉冲。为了抑制HOD 在初始时刻时产生的脉冲现象,考虑在观测方程(14)加入了脉冲抑制方程。
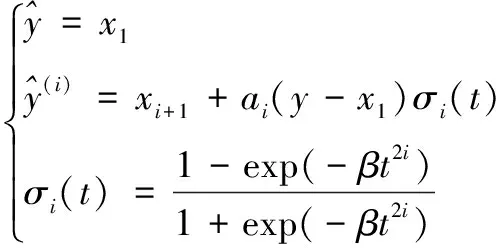
(22)
其中:σi(t)为脉冲抑制方程,t为系统运行时间,参数β为一个常数。初始时刻σi(t)≈0,脉冲抑制方程仅在这个时候起作用,经过短暂时间迅速收缩在1,公式(22)逼近公式(14)。且β越大,收缩越快,但是β过大会使得脉冲抑制方程的效果变差,此处折中选取β=100。由于系统没有发生变化,因此加入抑制方程后HOD的稳定性和收敛性依然得到保证。
3 控制器设计及稳定性分析
3.1 控制器设计
u=P[Kε-y(n)]
(23)
其中:K=[kn,kn-1,…,k1]使s(n)+k1s(n-1)+…+kn为Hurwithz多项式,P为较大的增益。大量仿真实验表明,基于该控制器设计的控制系统具有很强的鲁棒性[12],且HODFC适用于非最小相位系统控制[13]。HODFC控制器利用误差的各阶微分信息进行反馈控制,能够有效地抑制系统误差的高频分量,提高系统响应速度和稳定性。需要注意的是,HODFC控制器的设计需要根据实际系统的特点进行参数调整,确保控制效果的稳定和可靠。
3.2 稳定性分析
设带有未知扰动的不确定系统模型表达式如下:
y(n)=f(x,v,t)+g(x,v,t)u+d(t)
(24)
其中:x=[y,y(1),…,y(n-1)]T表示有界输出的各阶微分向量,v=[u,u(1),…,u(n-1)]T表示有界输入的各阶微分向量,d(t)为随机干扰信号。f(x,v,t)和g(x,v,t)均为未知非线性有界光滑函数。该系统的控制目标是设计一个控制器产生控制系统u,使得系统状态在给定约束下(例如误差界、收敛时间等)能够实现稳定控制。对于此类不确定系统,传统的控制方法往往难以满足稳定性和鲁棒性的要求,因此需要设计先进的控制方法。
将HODFC控制律所示的式(23)代入不确定系统模型式(24)中,可以得到:
y(n)=f(x,v,t)+g(x,v,t)P(Kε-y(n))+d(t)
(25)
g(x,v,t)P(y(n)+k1y(n-1)+ … +kny)=
g(x,v,t)P(k1yr(n-1)+ … +knyr)+f(x,v,t)+d(t)-y(n)
(26)
式(26)两端同除g(x,v,t)P,得到:
y(n)+k1y(n-1)+ … +kny=k1yr(n-1)+ … +knyr+θ
(27)
其中:θ=(f(x,v,t)+d(t)-yn)/g(x,v,t)P,由于函数f(·),g(·),d(t)有界,从而yn有界,因此θ有界,即可以通过调节增益P使θ趋于零,从而有
y(n)+k1y(n-1)+ … +kny=k1yr(n-1)+ … +knyr
(28)
进一步可以导出系统输出对给定输入的线性闭环传递函数:
(29)
由于K=[kn,kn-1,…,k1]满足使多项式s(n)+k1s(n-1)+…+kn为Hurwitz多项式,因此该特征方程所确定的控制系统满足Routh-Hurwitz稳定判据,因此系统渐进稳定并具有良好动态品质。
图6为基于HOD的Z源逆变器高阶微分反馈控制实现图。
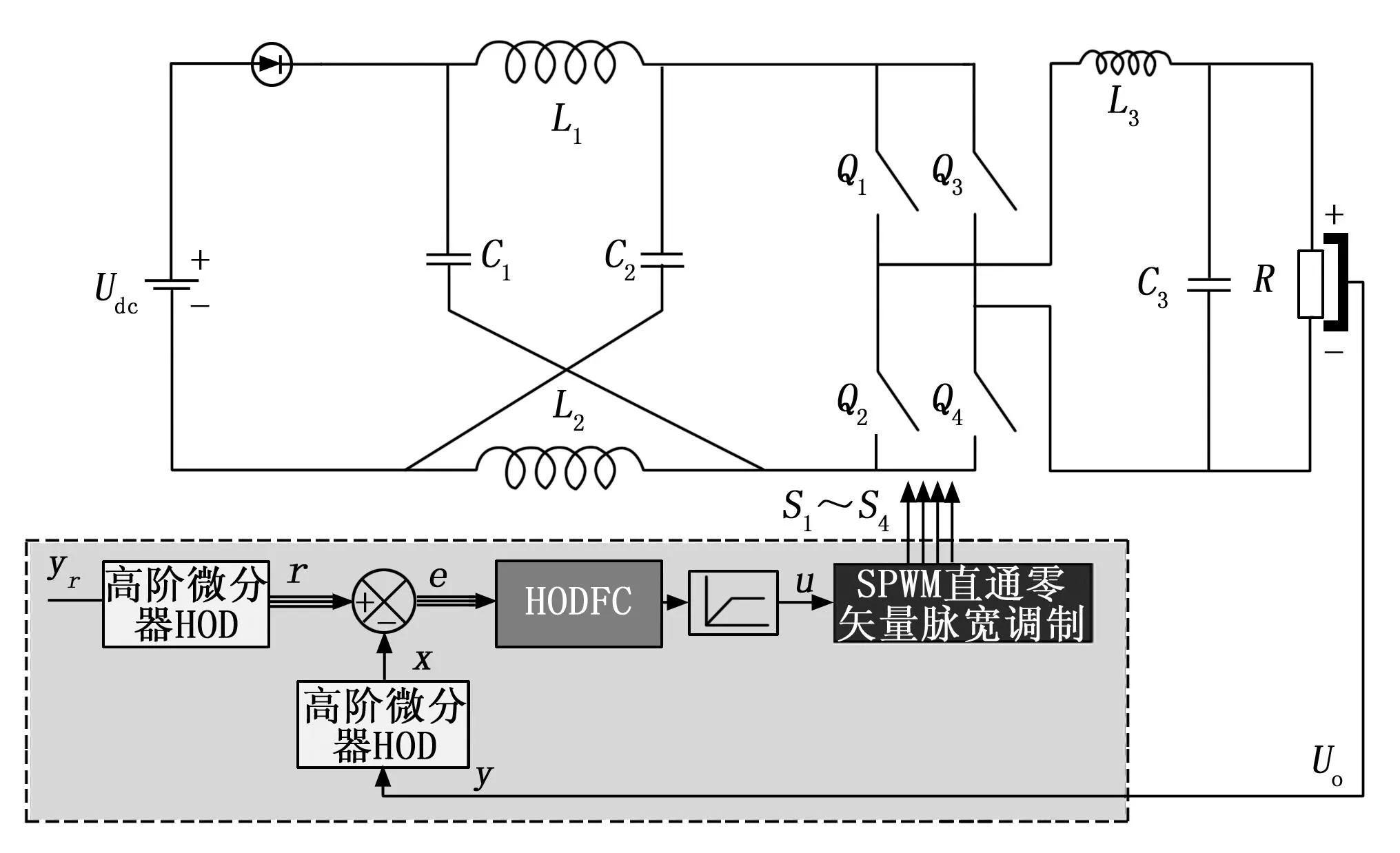
图6 基于HOD的 Z源逆变器高阶微分反馈控制示意图
4 仿真结果及对比实验
在Simulink环境中搭建Z源逆变器的仿真电路模型及控制器模型,部分电路参数如下:输入电压为直流28 V;输出电压为115 V/400 Hz;开关频率为20 kHz;Z源电容为1 000 μF;Z源电感为2 mH;输出滤波电容为16μF;输出滤波电感为0.1 mH。
4.1 仿真结果
图7和图8分别为采用本文HODFC控制策略得到的Z源逆变器输出电压稳态波形及其有效值响应图像。从图中可以看出,输出电压稳定在有效值115 V频率400 Hz交流电,并且输出电压有效值在0.06 s内无超调迅速达到给定115 V,响应较快。这说明本文提出的HODFC控制策略能够有效地控制Z源逆变器的输出电压,并且具有快速响应、高稳定性和可靠性的特点。
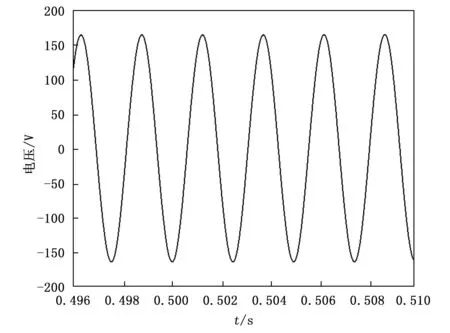
图7 逆变器输出电压稳态波形

图8 逆变器输出电压有效值
4.2 仿真对比实验
为验证HODFC在Z源逆变器控制方面的优势,在相同仿真环境、给定信号、系统参数的前提下,采用本文的高阶微分反馈控制(HODFC)对比采用滑模控制(SMC,sliding mode control)、模型参考自适应控制(MRAC,model reference adaptive control)策略下Z源逆变器输出电压响应。Z源逆变器在不同控制策略下,输出电压有效值响应曲线如图9所示。

图9 逆变器输出电压有效值响应曲线
从图9中可以看出,当采用SMC和MRAC控制策略时,系统输出存在超调且调节时间较长,而采用HODFC时,系统无超调并且在0.06 s内迅速到达给定115 V,动态响应较快。
表1给出了3种控制策略下系统响应的各项性能指标。从表中可以看出,采用HODFC时,系统的调节时间、超调量和稳态时间相比MRAC和SMC都更低。因此,采用HODFC使得Z源逆变器的稳态性能更优。这说明本文提出的HODFC控制策略在Z源逆变器控制方面具有明显的优势,能够更好地实现对系统的控制和调节。

表1 不同控制策略下系统调节时间
为进一步验证采用HODFC策略时Z源逆变器的动态性能,在系统稳定后对系统加入扰动信号(包括负载突变,输入电压突变)进行仿真对比实验。
图10为0.2 s时刻输入电压由32 V突然跌落至28 V时,系统输出有效值电压在不同控制策略下的响应曲线。从图中可以看出,输入电压跌落瞬间,3种控制策略下系统输出电压都会产生跌落,但是采用HODFC时电压跌落最小并且能迅速将电压调节至给定115 V。
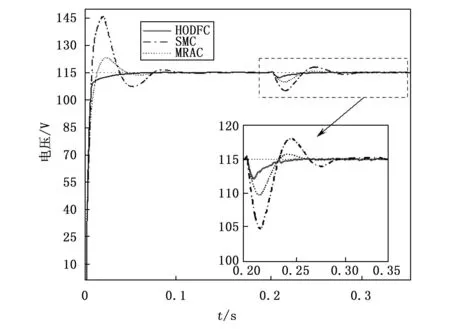
图10 输入电压跌落时逆变器输出电压有效值
图11为系统在0.2 s时刻突加阻感负载时输出电压有效值的响应曲线。从图中可以看出,突加负载瞬间,3种控制策略下输出电压有效值均产生跌落。

图11 突加阻感负载时逆变器输出电压有效值
系统在SMC策略下电压跌落至104.2 V,MRAC策略下电压跌落至105.1 V,HODFC策略下电压跌落至108.6 V。且SMC策略下输出电压重新达到115 V需要经过150 ms,而MRAC和HODFC策略下输出电压在100 ms内就达到给定值115 V。因此HODFC控制策略抗干扰能力更强。图12为加入阻感负载系统稳定后输出电压及负载电流曲线,此时输出电压峰值为162.9 V,满足给定115 V有效值要求由此可见,Z源逆变器采用HODFC控制策略后,能够在加入阻感负载后对输出电压进行有效的控制,保持输出电压稳定。而在其他两种控制策略下,系统的电压响应存在较大的波动,且输出电压峰值也无法满足要求。因此,HODFC控制策略在抗干扰性能和输出电压稳定性方面都表现出更好的性能。

图12 逆变器输出电压及负载电流
当逆变器输出电压驱动非线性负载时,其输出电压波形容易产生畸变[24-25]。这种畸变会导致功率因数降低、电磁干扰等问题,因此研究逆变器带非线性负载的波形畸变是非常重要的。由于现代电力设备和电子设备的广泛应用,电源系统中的非线性负载日益普遍。这些非线性负载会引入谐波电流的干扰,从而使得系统的功率质量受到影响。而最常见的非线性负载就是包含二极管(Diode),电阻(Resistor)和电容(Capacitor)的RCD整流负载。系统在0.2 s时刻突加RCD整流负载时系统的输出电压有效值响应曲线如图13所示。

图13 突加RCD负载时逆变器输出电压有效值
从图13中可以看到,突加RCD负载瞬间,输出电压产生大幅跌落随后在控制系统的调节作用下逐渐跟踪给定115 V有效值。根据局部放大图,采用MRAC时,系统输出电压超出115 V并保持;采用SMC时,系统输出电压产生小超调并在500 ms后达到给定115 V;采用HODFC时系统输出电压无超调并在300 ms后达到跟踪给定115 V的效果。因此,在突加非线性负载的情况下,HODFC控制策略同样表现出较好的跟踪性能和鲁棒性能,相比于SMC和MRAC,HODFC策略下系统的响应速度更快且更稳定。这表明HODFC控制策略具有更强的适应性和鲁棒性能,适用于复杂负载和多变环境下的电力电子装置控制。图14为加入RCD负载后,不同控制策略下系统稳定状态输出电压波形与标准正弦波对比图。
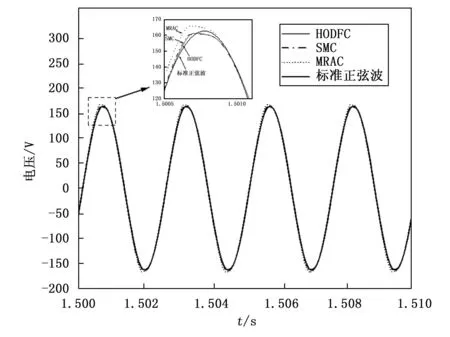
图14 逆变器输出电压波形
综合以上仿真对比结果可以看出,本文所提HODFC控制策略使Z源逆变器具有良好的稳态和动态性能。
5 结束语
1)本文将Z源逆变器引入ASI的设计,克服了H桥逆变环节需要加入死区时间带来的输出电压波形畸变问题;采用Z源一级网络取代了传统两级式ASI,降低了系统复杂性;并且由于Z源逆变器能在直通状态下正常运行,提升了系统的可靠性。
2)本文介绍了一种不需要系统模型的控制方法——高阶微分反馈控制(HODFC),并详细探讨了高阶微分器(HOD)的设计和稳定性分析。为了保证系统稳定性、减少参数数量以及保持一般性,选取相同的负实根作为HOD的零点,并利用根轨迹方法确定HOD的参数,以使得闭环系统的所有极点均位于s平面的左半部分。
3)针对基于Z源逆变器的ASI系统高阶及其非最小相位特性带来的控制器设计复杂的问题,引入高阶微分器提取系统的各阶微分信息,在此基础上设计了Z源逆变器的高阶微分反馈控制律,并证明了其稳定性。仿真实验结果表明将该控制策略用于Z源逆变器电压控制使得系统拥有良好的性能表现。
