基于机器学习的量子通信激光器功率控制系统设计
2024-02-29杨俊岭
杨俊岭
(军事科学院 军事科学信息研究中心,北京 100142)
0 引言
量子通信激光器是一种单极性器件,通常由多个级联模块组成,子带间具有跃迁的单极性,利用耦合量子价带中含有的跃迁特性产生激光,从而实现多个粒子的散射功能[1]。原有双极性半导体激光器在带间跃迁下产生激光,而光子能量因受材料影响产生带宽限制,仅能应用在可见光和近红外波段[2-4]。随着多量子阱技术和分子技术逐渐发展,量子通信激光器增加了量子阱宽度函数,从理论上拓宽了辐射频率,只需要在子带间建立足够的粒子数反转,就能将光谱范围覆盖到太赫兹波段[5]。在新兴材料的不断研发过程中,量子通信激光器实现了多量阶级能带结构改变和分子光束外延技术的应用,促使电子量态和光学散射的技术发展,能对千万个量子阶进行精确[6]。因此量子通信激光器具有高功率和窄线宽以及易集成特征,在多个领域内均具备应用价值。
随着量子等级的增加,其在无损检测和显微技术中的需求日渐增加。而随着网络服务中用户的快速增加,无线数据流量呈现指数增长态势,因此需要更快速的新技术进行支撑[7-9]。为了保证量子通信激光器在通信和成像以及光谱分析等多个方面进行广泛应用,对该器件的管理和控制提出了更高要求,包括稳定的高输出功率和偏振功率的调控,需要设计一个可行的功率控制系统。文献[10]提出面向混沌半导体激光器的高稳定控制系统。采用深度负反馈技术,实现激光器的驱动电流高稳定高精度恒流控制。在此基础上,提出了一种H桥驱动电路,并利用该电路实现了激光器温控系统设计。文献[11]提出基于辐射压力传递的激光功率稳定策略,有源激光功率稳定方案从根本上受到环内光电探测器上量子散粒噪声的限制,克服这一限制的方法是实现非退化感测方案,其中激光功率波动被转移到微振荡器的运动,微振荡器可以以高信噪比进行感测。分析受量子和热噪声限制的非退化方案,可实现的功率稳定控制。
上述方法均具有一定的有效性,但对量子通信激光器数据传输的脉冲功率波动控制效果较差,基于此,本文以机器学习理论为研究基础,设计量子通信激光器的功率控制系统,在系统硬件方面,采用 MCU和 FPGA为主要控制单元,利用模数转换器,利用串行封装的方式实现了变换电路的设计。在软件方面,通过搭建激光通讯的探测单元,根据多个量子间的耦合建立激光主动区域的调控方式,根据介质的介电常数分析激光的工作模式,并相应的能量反馈条件。利用机器学习的Q函数算法,获取最优的功耗控制策略,为连续精确的功率控制提供理论支持。
1 量子通信激光器功率控制系统硬件设计
本次控制系统主要是为量子通信激光器提供连续供电和管理以及控制功能,实现量子通信激光器的光功率在连续脉冲下的持续输出。在获取不同的控制指令后能完成相应的控制能力,在量子通信激光器控制系统总体设计中会包含多个功能模块,总体结构如图1所示。
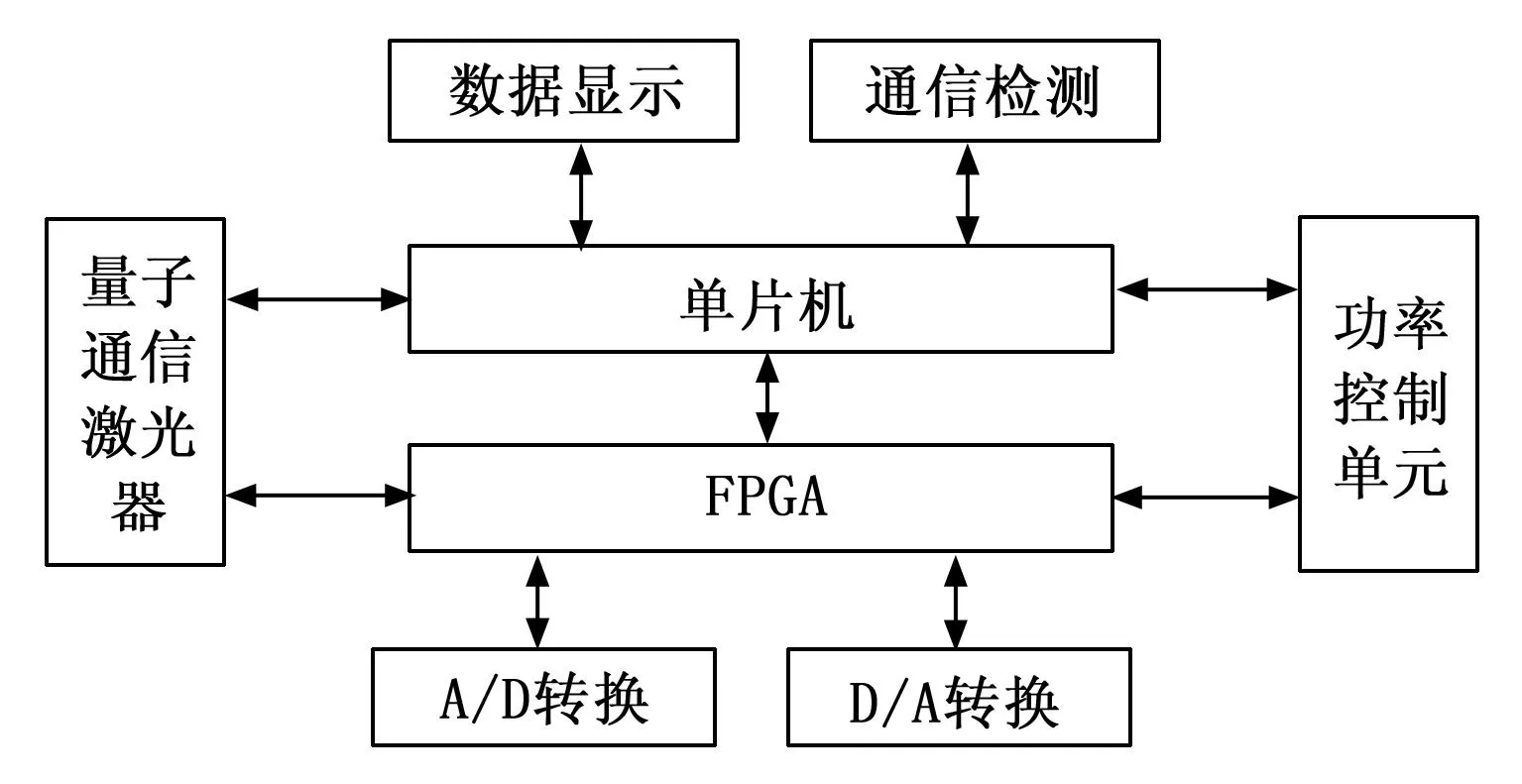
图1 量子通信激光器功率控制总体结构
根据图1所示,此次设计的控制系统含有6个功能模块,分别为单片机主控单元、量子通信激光器电源控制单元、FPGA主控单元、显示单元、A/D与D/A转换单元及功率控制单元[12]。本文按照模块功能选择主控单元和转换单元作为系统基础,分别对量子通信激光器进行功率控制系统的硬件设计。
1.1 选择量子通信激光器主控单元
功率控制系统中的主控单元为单片机和FPGA,主要功能为接受下位机的指令,完成对底层设备的控制和管理,并对产生的数据进行运算处理,实现量子通信激光器的运行参数结果显示和数据存储[13]。根据控制系统的功能要求,一方面采用MCU+FGPA相结合的控制核心板,对整个控制系统进行数据处理和结果数据,作为整个控制系统的数字部分的设计基础;另一方面对单片机的选择要具备丰富的接口,选择FREESCALE公司生产的MC96S14CD521单片机作为控制芯片,保证数据的存储和通信接口能够满足控制系统功能。
此次选择的单片机为增强型16位单片机,具有增强型内核和外盒设备,能将控制系统的总线速度控制在45 MHz之上,还具备中断处理服务的功能。此次单片机通过通信传感器实时检测量子通信激光器所接受的数据值,并将通信功率上传至LCD中进行显示,当功率过高或者过低时会发出预警信号[14]。对两个主控单元的参数进行展示,如表1所示。
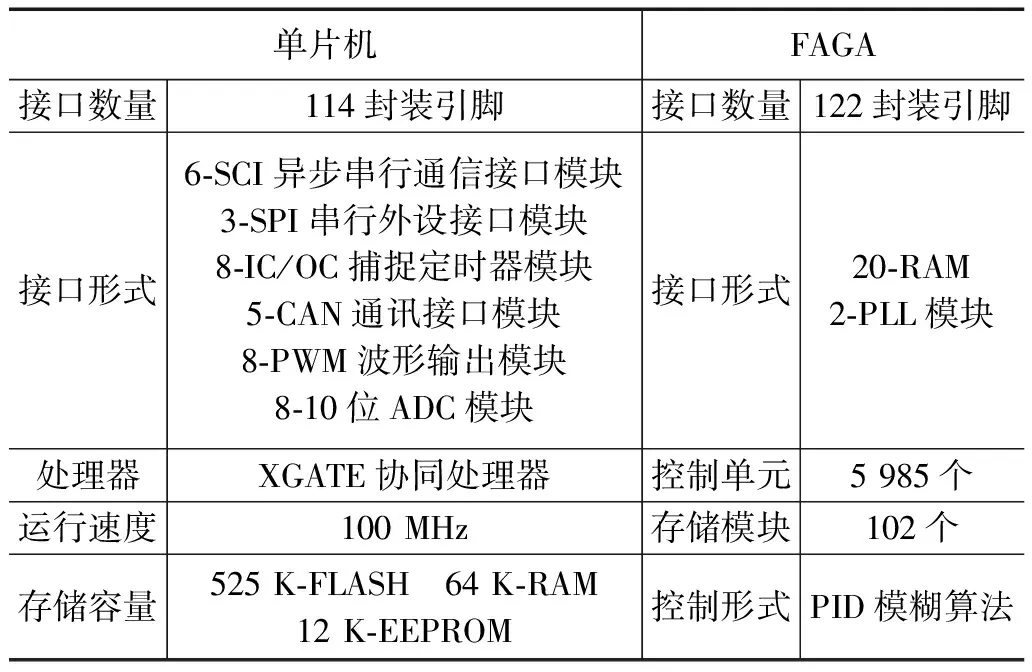
表1 量子通信激光器控制系统主控单元参数设定
如表1所示,在单片机中加入协同处理模块能增加数据的预处理功能,在单片机高速运行的同时保证数据处理效果,可以在不同的端口内完成数据的高速传输和处理[15]。单片机的协同处理器还能够读取外围电路的接口数据,将数据的处理结果直接发送到通信接口中,减少单片机的工作负荷,在一定程度上提升量子通信激光器外围器件的通信效率。FAGA控制单元财通ALTERA公司生产的EPIC6T122CT7N型号,具有低密度和低速率的转换模块,能够在核心控制单元直接对量子通信激光器进行电源输出电流的控制,以此实现激光器的输出功率控制。
1.2 转换单元电路设计
在控制系统中计算机只能对数字信号进行识别,而常规模式下被检测和控制的对象均是模拟信号,为了保证计算机能有效识别出模拟信号,需要将模拟量转换为数字信号进行识别,才能将激光器中的通信数据完成运算和处理[16]。在本文设计的控制系统中采用A/D转换单元,通过A/D将量子通信激光器内的功率信号进行转换,形成模拟量的输出电压信号,将其变化为FPGA能识别的数字电压信号。
选择美国公司生产的AD234882转换器,为16位逐次逼近型转换器,能够在2.5~5.75 V的电源电压模式中完成工作,将电压控制在25 mV-VCC之间任意配置。电压的参考值直接决定了模拟信号的输入范围,A/D的转换结果也通过串口表达,该芯片的工作电压较低且功耗较小,便于应用在量子通信激光器的控制系统中。AD234882转换器的引脚封装如图2所示。

图2 封装芯片引脚图
根据图2所示,AD234882转换器采用串行输入结构,能节省FPGA的接口资源,在采样速率为85 kHz的条件下功耗为0.65 mW。同理也可以在单端形式下进行差分信号模拟,对每个引脚的功能进行分析:
1)1脚:VREF表示输入参考电压;
2)2脚:+IN表示输入同相端的模拟信号;
3)3脚:-IN表示输入反相端的模拟信号;
4)4脚:GND表示电源;
5)5脚:CS/SHD表示片选端;
6)6脚:DOUT表示输出串行数据;
7)7脚:DCLOVK表示数据时钟;
8)8脚:+VCC表示供电电源。
以各个引脚的功能设计A/D转换模块的电路,在其正常工作时为激光器提供直流电压,据此对A/D转换模块的转换电路进行设计,局部电路如图3所示。
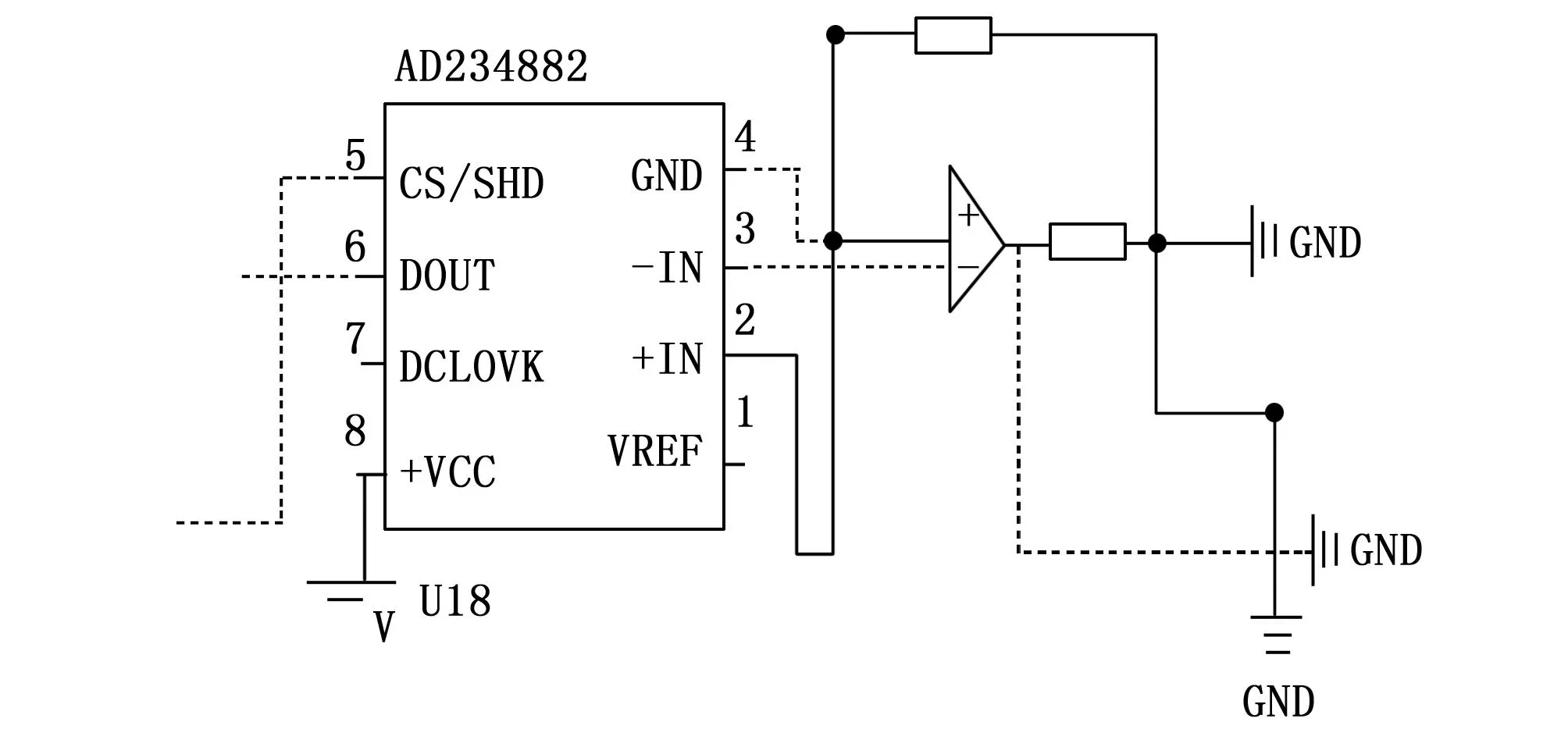
图3 转换电路设计原理图
如图3所示,AD234882转换器的5脚、6脚和7脚分别与FPGA的SPI串行接口进行连接,负责反馈FPGA的模拟量信号,进行输出电压信号参数的传输;2脚与量子通信激光器的输出功率传感器相连,再从而完成反馈的模拟信号向数字电压信号的转化,并与设定的基准值进行参数比较,实现量子通信激光器的输出功率控制。
2 基于机器学习的功率控制系统软件设计
2.1 设置量子通信激光器通信检测单元
量子通信激光器的输出功率是激光器运行的重要参数,输出功率的稳定与准确直接影响到激光通信领域的应用[17]。在量子激光通信过程中实时检测和控制激光器的输出功率是十分必要的,主要目的是在给定的功率值下保证激光器能够在该范围内完成稳定地运行。由于量子通信激光器是驱动型器件,需要对其提供激励电流才能正常运行,要实现对光纤激光器的输出功率控制需要不断调节驱动电源的激励电流,以此保证最终输出功率的控制。
将量子通信激光器的驱动电源设定为恒流源,根据PID 算法设置激光器的驱动电源激励电流的输出类型,完成量子通信激光器的功率变化形式界定。一般情况量子通信激光器是在连续脉冲下进行通信输出的,在PID算法模糊规则匹配过程中给定输入电流与输出功率对应关系,设置I为激光器输入电流,单位为A,P为激光器输出功率,单位为W。两者变化曲线如图4所示。

图4 量子通信激光器I与P变化关系
根据图4所示,激光器的驱动电流值与输出功率具有良好的线性关系,因此本文系统通过控制量子通信激光器的驱动电流,以此来间接控制激光器的输出功率[18]。从图中的数据可以看出电流分别为10、20、30、40、50、60 A,对应的功率为36、116、195、273、351、428 W,通过量子通信激光器的驱动电流值和输出功率间的线性关系,建立线性方程如下:
a=8f-46
(1)
式中,a为激光器的输出功率值。f为量子通信激光器驱动电流值。将两者的线性关系代入到机器学习算法中,在控制端为0~10 V的模拟电压中对应有0~70 A的电流输出,关系表示为I=7U。将U表示为激光器电源控制端的模拟电压输出值,当量子激光器的驱动电源发生波动时,会造成激光的输出功率不稳定,在A/D转换单元中将信号转变为数字信号,利用机器学习的线性方程在线实现功率的整定和调节,达到量子通信激光器的功率控制作用。
2.2 多量子耦合下设定激光器有源区控制形式
量子通信激光器中能量相近的电子能形成的微带可以提高电子的抽取效率,以多量子耦合关系设定功率控制的有缘区表现形式,保证微带可以由多个量子耦合而成,而微带带边中的复合辐射跃迁能更产生带间跃迁功能[19]。在连续态的区间内上激光能级为束缚态,下激光能级为微带形式,通过上下交叠的形式可以增加上下能级之间的跃迁距离,以此提升量子通信激光器的上能级电子寿命。
在有源区内会限制量子通信激光器的部分波导结构,其中SISP波导结构由上金属和有缘区以及半绝缘衬底组成,为保证构建的有缘区和衬底之间会形成掺杂浓度,设计衬底厚度为250~850 nm,使得半绝缘衬底具备类金属特性,具体分布形式如图5所示。

图5 有缘区介质波导表现形式
根据图5所示,在量子通信激光器内设计控制系统的有缘区介质波导基模,设定光限制因子为15%~55%,腔面反射率在35%~65%范围内,保证波导具备较高光限制因子与较低波导损耗,以此有效降低量子通信激光器的阈值增益[20]。在衬底中含有多个分布场,由于SISP波导的出面面积较大,在低腔面的反射率作用下能够获得更高的辐射损耗,因此设置双金属波导结构能更将光场完全控制在有缘区内。
在有缘区内双金属波导结构会形成两个金属夹层,光场被完全限制在有缘区中,光限制因子可约等于100%。并且在双金属波导结构中的主要损耗为外伸的掺杂层,当腔面高度与有源区厚度相接近时,以95%的腔面反射率作为增益前提,通常情况下以极高的光学限制因子获取控制参数,表现为:
δqwe=rt+ru
(2)
式中,δ表示在有缘区内设定波导结构的限制因子。qwe表示阈值增益。rt表示本征损耗,主要为掺杂层的自由载流子吸收。ru表示谐振腔辐射损耗。由于本征损耗与量子通信激光器的外延性能相关,因此常使用阈值净增益qnet,we进行控制,即去掉本证损耗的增值为qnet,we=ru。因此在SISP波导介质的基础上,实现多量子耦合关系下的有缘区形式设定,保证量子通信激光器具备相对较好的输出功率。
2.3 基于介电常数对应量子通信功率反馈条件
在介电常数的周期性变化规律中对于特定频率的电磁波,其有缘区内的波导结构中存在有耦合关系,通过光栅平面内的矢量守恒原理选择功率反馈条件。为保证有效控制量子通信激光器的输出功率,以波导模式场的分布结构对应功率问题,在不同射频面内进行有限分析。上节中表明有源区中的增益与频率有关,在多个腔面占比中所支持的频谱共同决定了量子激光器的运行模式,守恒形式表示为:
2α=iβ
(3)
(4)
pβ=α+dssin(εs)
(5)
式中,p表示衍射级别,ds表示衍射波的波矢量,εs为衍射角度,即衍射的波矢量与腔表面的法线方向夹角。根据不同的光栅阶数能够形成多个布拉格反射条件,当光栅阶数逐渐增加时,布拉格衍射级别也不断增加,在不同的衍射级别与量子波矢量关系中形成动量守恒关系。
在已知的条件下选择功率反馈模式表示i=1、i=2、i=3时的光栅反射条件。当处于一阶光栅时功率反馈器只能容许功率呈现背向散射,当处于二阶光栅时容许为背向散射或者垂直于表面的功率辐射,当为三阶光栅时除了背向散射还需要在特定角度下进行功率反馈传播,只有在设定的反馈条件下,有效折射率大于3时才能将功率耦合到自由空间中。
由于光栅阶数可以在剥离技术下进行光刻制备,因此在不同的功率反馈条件中能够使波导模式产生不同的折射率,以满足量子通信激光器的传输模式,保证该器件在多种介质中完成周期性信号传输,无论波导介质常数怎样变化,均可以在金属结构的有缘区损耗中自由变化波长。金属基底在有源区上方交替出现,促使介电常数发生周期性的变化,而光栅在角度转换中可以改变折射率,在强反馈模式下对功率产生一定的控制作用。
2.4 基于机器学习控制量子通信系统激光器功率
机器学习的主要方法有决策树学习和人工网络学习以及加强学习,各个算法能解决的问题各不相同,而对软件的设计此次选用加强学习算法对功率进行控制,即在特定状态下对量子通信激光器的动作进行最优策略选择。加强学习中非常重要的算法为Q算法,表现为当前环境状态下执行某一组动作后对量子通信激光器的运行状态进行描述,并在收到状态描述的基础上更新Q函数,以此重复地进行学习最终寻找到最优的控制参数。
假设Q学习的初始函数为0,当其处于状态h1时采取恰当的动作k会进入到状态h2,此时在该状态下选择的动作能够存在一组Q函数。设定Q函数在动态区间学习的过程中产生的误差是按照λ来减少的,在j次通信传输后得到的函数值即为实际Q函数,其关系表示为:
Δj=maxh,k|Qj(h,k)-Q(h,k)|
(6)
|Qj+1(h,k)-Q(h,k)|=
|l+λmaxzQj(x,z)-[l+λmaxzQ(x,z)]|=
λ|maxzQj(x,z)-maxzQ(x,z)|
(7)
式中,Q(h,k)表示实际过程中的Q函数值,Qj(h,k)表示j次更新后的估计Q函数值,Δj表示通信传输过程中的最大误差,h为当前状态选择的动作,k为对应选择的动作,x表示下一状态,z为下一对应动作,在j+1次更新后误差量为Qj+1(h,k)。在此基础上引入新的变量g,当变量发生变化时最大值只能大于或等于当前的值,推导出与Δj相匹配的表达式:
|Qj+1(h,k)-Q(h,k)|=
|l+λmaxzQj(x,z)-[l+λmaxzQ(x,z)]|≤
λmaxg,z|Qj(g,z)-Q(g,z)|
(8)
通过上式完成推导即表示为|Qj+1(h,k)-Q(h,k)|≤λΔj,从该不等式中可以看出,更新后的Q函数值的最大误差是Δj的λ倍。当j为无限大的时候Δj会趋近于0,可在Q函数的不断更新下完成对量子通信激光器输出功率的控制。至此本文通过对硬件和软件的综合分析,实现了量子通信激光器的功率控制系统设计。
3 实验测试分析
上文中通过机器学习设计了量子通信激光器的功率控制系统,为验证新系统具有应用效果,采用对比测试的方法完成论证。分别选择基于遗传算法控制系统和时序分类控制系统以及基于双平衡控制系统作为对照组,分别与本文控制系统进行对比,在不同信号增益条件下对激光器的初始脉冲功率进行控制,验证不同系统的控制效果。
3.1 设定测试条件
以数值模拟方式推导量子通信激光器脉冲形状,在数值计算中设定脉冲的初始高度和宽度均为0,脉冲的变化条件为1.5 ps。分别选择不同的信号增益条件,在0.05、0.10、0.15时获取激光器的功率变化情况,如图6所示。
图6 不同信号增益条件下激光器功率变化
根据图6所示,此次选择的变化条件基本为小信号增益,在不同的增益条件下激光器的功率会发生波动,且对应的脉宽与功率变化相一致。当功率增长时脉冲带宽随之增加,当功率下降时脉冲宽度随之缩减,但对着通信脉冲的多次往返会将功率保持在一定数值,使其保持在稳定状态。
综合图6(a)与(b)中的信息可知,当功率稳定在4.25×103W时,不同信号增益对应的脉冲宽度分别为528、556、585 FS,并且在稳定后无论脉冲如何往返,激光器的功率和脉冲宽度均不会发生变化。但实际应用过程中若往返次数过多会影响通信信号的传输效果,需要对量子通信激光器进行功率控制。分别将选择的控制系统应用在该量子通信激光器数据传输中,验证不同系统的控制效果。
3.2 分析测试结果
将设定的多组信号增益条件下的功率变化情况上传至Matlab测试平台,分别连接选择的4组控制系统,对不同的功率进行控制效果比较,结果如图7所示。
图7 功率控制效果
根据图7所示,在文本系统应用下无论是哪一种信号增益条件,均可以在50次往返过程中对功率完成控制,使其保持在稳定状态。而3组传统控制系统仅能对信号增益为0.05条件,在较少的往返次数中将功率控制在稳定状态,当信号增益为0.15条件时,3组传统系统的功率控制往返次数分别为500、650和700次,虽然较比原有的往返次数有所减少,与本文系统相比仍存在较大差距,说明本文系统更加有效。
在此基础上对控制后的通信脉宽进行分析,验证在控制后脉冲形状是否能与功率变化保持一致。结果如表2所示。

表2 功率控制后脉冲宽度比较 fs
根据表2所示,本文系统应用后在不同的信号增益条件下,可以保持与样本数据一样的脉冲带宽,表明新系统具备控制时效的同时具有精准的控制效果,而3组传统系统存在一定的误差,综合说明本文系统更加有效。
4 结束语
对量子通信激光器中激光的控制主要分为空间上、时间上的控制,前者包括幅度与相位的控制,后者包括频谱和时谱的控制。幅度调控主要为量子通信激光器输出功率的控制,此次着眼于获取高功率光源来设计控制系统的多个结构,以机器学习中的不同算法完成了控制系统设计,并在对比测试中验证了新系统有效性。但由于对硬件模块中仍有待完成的模块,在设计过程中存在少许不足之处,后续研究中会对剩余的模块功能进行完善,推进量子通信激光器控制系统的应用。
