综合直接侧力控制着舰
2024-02-27尹大伟苏析超
汪 节, 韩 维, 尹大伟, 苏析超
(1.海军航空大学,山东 烟台 264000; 2.中国人民解放军91475部队,辽宁 葫芦岛 125000;3.中国人民解放军92728部队,上海 200000)
0 引言
舰载机的回收技术和能力,直接关系到航母的整个体系作战能力,也直接关系到飞行员的操纵负担和培训成本等。2016年美国海军研制成功MAGIC CARPET着舰技术,被称为着舰“游戏规则改变者”,该技术首次使用了综合直接升力控制和DP控制模态[1-2]。美国海军在MAGIC CARPET综合直接升力控制的基础上,继续开发验证成功ATARI着舰项目[3-4],其在横向中首次使用横向轨迹增量控制方法,只不过横向仍采用常规舵面动力学,使得横向操纵的难度比纵向要大。文献[5]研究了无人机在动平台上自适应直接升力着陆。国内也正开展综合直接升力控制的学术研究[6-8]。
如前文,目前学术文献和工程技术上研究的多为综合直接升力控制着舰。而舰载机侧向控制着舰仍然采用常规舵面,这使得侧向的力矩控制和力控制存在耦合,导致以下问题:飞机的横航向具有很强的交联,飞行员需要综合操纵侧向杆和方向舵,负担较重;航母航行让甲板中心线始终有一个横向速度分量,为了跟踪甲板中心线,飞机要么通过侧航跟踪,要么通过侧滑跟踪,前者有航向角偏差,后者有滚转角偏差,这两种偏差对触舰拦阻都造成了影响甚至有危险;对于气流干扰,飞机要么通过侧航来消除尾流引起的侧滑角,要么通过滚转来抵消横向干扰力,同样都影响触舰拦阻。
为了降低飞行员侧向操纵负担和提高侧向着舰性能,本文首次将直接侧力应用到着舰研究上,并借鉴MAGIC CARPET着舰技术的理念,研究基于综合直接侧力控制的横向轨迹增量控制着舰,为该领域的理论研究和工程实践提供参考。
1 侧向着舰运动建模
1.1 飞机侧向运动模型
着舰状态下,飞机纵向和侧向之间是解耦的,原因如下。
1) 纵向运动中的相关变量,在着舰飞行状态下基本不变(在很小区间内变化且收敛到配平状态),纵向对侧向的耦合很小,基本不影响侧向运动。
2) 侧向运动相关变量的变化,虽然会对纵向运动方程有影响,但是纵向的控制(飞行员操纵或飞行控制律)会抵消掉这种干扰,如MAGIC CARPET着舰技术中的解耦控制设计。另外,本文的控制方法让滚转角在着舰时始终保持在配平值(0°)附近,更加有利于侧向对纵向的解耦。
因此,在着舰状态下,可以对纵向、侧向进行分开设计。另外,由于着舰飞行中的各状态量总是在配平状态附近,因此可以采用小扰动运动方程设计侧向控制[6]。本文采用文献[9]的方程如下
(1)

本文主要是利用侧向过载实现侧向控制,这里计算模型式(1)中的侧向过载潜力,即

(2)

(3)
其中,V,χ,g分别为速度、侧向轨迹角和重力加速度,均为标量。
由式(1)得到偏航方向的舵面协同约束为
-5.9244δr+2.9114δc=0。
(4)
由式(2)~(4),以及舵面幅度限制,可算出过载潜力为ny=0.3。
根据文献[1],美国海军的MAGIC CARPET的纵向过载潜力为0.1,可以达到很好的纵向着舰控制效果。因此可知,本文模型计算的侧向过载潜力可以满足着舰控制需求。
1.2 着舰侧向对中建模
当飞机距离航母超过1 mile (1609 m)时,采用远程光束基准系统帮助飞行员捕获并一直维持在中心线的一个范围之内,以提高进入离着舰点1 mile内的侧向着舰精度。而当飞机距离航母1 mile以内时,飞行员主要根据甲板中心线的灯光和安装在甲板下沿的远程光束基准系统的位置关系,判断此时飞机相对于航母甲板中心线的位置。
舰载机侧向对中修正如图1所示。

图1 舰载机侧向对中修正Fig.1 Carrier landing lateral line-up correction
以航母坐标系为参考坐标系,舰载机侧向着舰对中偏差主要来源如下。
1) 飞机自身位置所引起的侧偏ya,包括初始位置侧偏、侧风干扰所引起的侧偏、飞行操纵不当所引起的侧偏等。
2) 航母前进和斜甲板夹角所引起的侧偏ys,这属于舰机相对线运动。
3) 甲板偏摆运动所引起的侧偏yψs,这属于舰机相对角运动,算式为
y=ya+ys+yψs。
(5)
要确保舰载机安全着舰,应使飞机相对于航母甲板中心线的侧偏y=0 m。
舰前进运动所构成的侧偏为
ys=(Vssinψd)t。
(6)
设偏摆运动ψs引起的侧偏移为yψs,则由图2所示的偏摆运动几何可求得yψs。
图2 舰的偏摆运动几何Fig.2 Geometry of ship’s yaw motion
设y=OaP0,y1=OaP1,x=OP0,x1=OP1,有
y1=(y-xtanψs)cosψs=ycosψs-xsinψs。
(7)
由于ψs角度很小(中等海况不超过0.7°),所以近似为
y1=y-xsinψs
(8)
即
yψs=y1-y=-x·ψs。
(9)
要说明的是,图2中,ψs为负方向,单位采用弧度制,x为飞机与期望着舰点(TDP)的距离。中等海况下,舰的偏摆运动ψs(单位为(°))可描述为
ψs=0.25sin 0.7t+0.5sin 0.1t。
(10)
2 控制结构和控制算法设计
图3是综合直接侧力着舰控制结构图。

图3 综合直接侧力着舰控制结构Fig.3 Integrated direct side force control structure
其具体说明如下。
1) 垂直鸭翼通道,实现横向轨迹角增量控制,类似MAGIC CARPET中的DP模态。

② 外环采用横向轨迹角增量控制,此处必须包含积分环节,以实现轨迹的精确控制。由于航母航行让甲板中心线始终有一个常量的横向速度分量,因此可以设置基准指令χref
χref=Vssinψd/V
(11)

(12)
2) 方向舵通道,实现偏航力矩配平以及航向保持/消除侧滑角。
① 方向舵通道引入垂直鸭翼指令,是为了在垂直鸭翼偏转时平衡偏航力矩。同时,由于方向舵和垂直鸭翼是同向偏转,因此加强了侧向直接力。具体算式为
k1=-Cnδc/Cnδr
(13)
式中:Cnδc为航向力矩系数对垂直鸭翼的导数;Cnδr为航向力矩系数对方向舵的导数。
② 外环可选择稳定航向或消除侧滑两种方案,各有利弊:稳定航向方案能让机身平行于甲板中心线,有利于触舰拦阻,但侧滑角的侧力减弱横向修正;消除侧滑方案能保证动力学上的简单且不影响横向修正,但修正时机身会有偏航。
3) 襟副翼通道,实现滚转角保持/控制和紧急情况下的侧向对中修正。
① 保持滚转角为0°:一是实现侧向直接力控制下的通道解耦,消除交联力矩的相互耦合;二是为了让机身始终水平,即使在侧向对中修正时也不滚转,保证触舰拦阻时的安全。
② 当飞行员驾驶杆位移量超过某个幅值时,驾驶杆信号进入滚转通道,使副翼有额外的偏转,参与紧急情况下的侧向修正。
4) 综合直接侧力控制着舰的特点。
综合直接侧力着舰控制结构如图3所示。总体上是以垂直鸭翼为直接力操纵面,实现横向轨迹角增量控制;同时,以方向舵配平航向力矩,保持航向角不变;以副翼维持机身水平。
相比于以往文献中的直接侧力控制,图3中控制方法的特点为:① 首次将侧向直接力应用到着舰场景;② 借鉴MAGIC CARPET的“综合”概念,适应着舰控制的需求特点,对三通道进行综合设计,让直接侧力通道成为主通道;③ 借鉴MAGIC CARPET的DP模态[1-2]设计横向轨迹增量控制。
3 HUD符号设计
在MAGIC CARPET项目中使用了相对于舰船的显示符号(Ship Relative Display Symbology)的策略,包括下滑道基准线(Glide Slope Reference Line,GSRL)以及相对于舰船的速度矢量(Ship Relative Velocity Vector,SRVV)[1-2]。注意到美海军在ATARI项目试飞时,飞行员HUD上多了一个垂直参考线[3]。
因此,如图4改进的HUD显示符号,在MAGIC CARPET的HUD基础上,增加固定的竖向短划线表示横向对中基准线(Line-Up Reference Line,LURL),进而与GSRL形成了“十”字型符号结构,并让SRVV可以在这个结构中移动。当SRVV在LURL的左/右侧,则表示飞机正在向左/右侧修正,且偏离越大,表示修正速率越快;当LURL与甲板中心线灯光重合,飞机无侧偏。
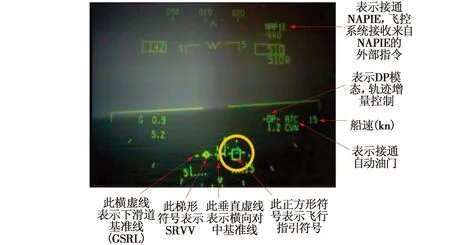
图4 改进的HUD显示符号Fig.4 Improved HUD symbology for carrier landing
4 实时仿真与分析
图3中控制器的参数调节是按照“从内环到外环”以及最优化响应的原则进行的。对前文中被控模型式(1)进行调试得以下数据:控制器1采用P控制,参数为6;控制器2采用P控制,参数为2.88;控制器3采用PI控制,参数分别为30和3;本例中不采用内环横向轨迹角速率控制;控制器5为P控制,参数为4;控制器6采用PID控制,参数分别为5,10和0.1;交联增益k1=0.5。
在计算机上连接操纵杆,进行实时着舰控制仿真,并用视景软件显示着舰视景。接上操纵杆,模拟飞行员操纵,实时修正对中偏差。从离舰1400 m时开始仿真,进场速度70 m/s,斜甲板9.5°,船速25 kn(1 kn=1.852 km/h),基准横向轨迹为1.7°。
着舰仿真实验分成两组:1) 实验组采用“综合直接侧力控制+横向轨迹增量控制”;2) 对照组采用“常规舵面控制+横向轨迹增量控制”。在不同条件下进行仿真,比较实验组和对照组的结果。
4.1 条件1:初始侧偏10 m
图5为初始侧偏10 m时,基于综合直接侧力控制的飞行员修正。图5显示,当采用“综合直接侧力控制+横向轨迹增量控制”时,飞行员操纵负担很小,可以通过类似MAGIC CARPET的“一杆操纵”策略(修正偏差时只需保持一个稳态杆值,在偏差即将修正完毕时松杆),操纵驾驶杆快速地修正侧偏,横向轨迹角增量能很快地响应跟踪飞行员杆指令,且能同时保持航向角和机身水平。
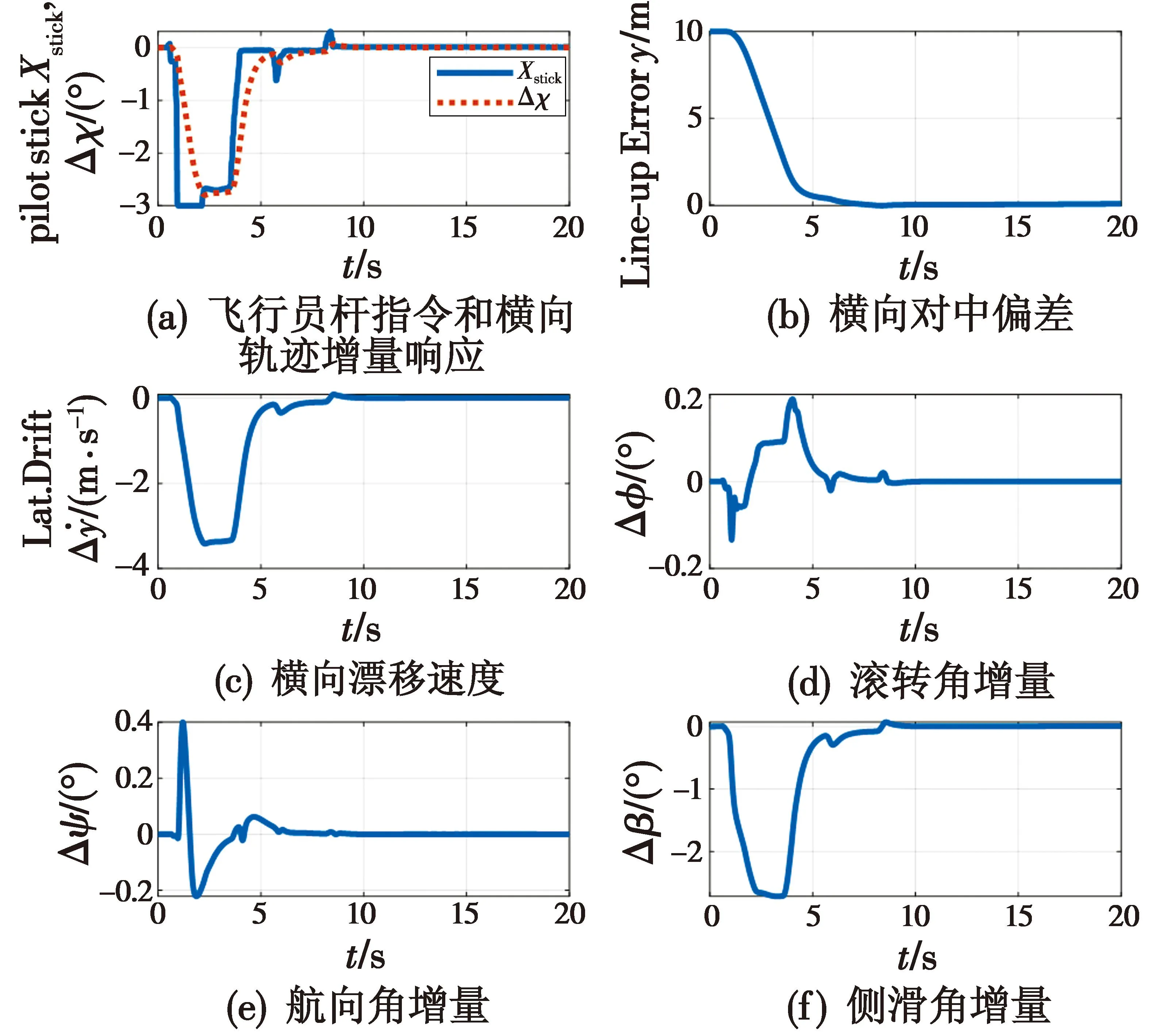
图5 基于综合直接侧力控制的飞行员修正(初始侧偏10 m)Fig.5 Pilot correction based on integrated direct side force control(initial line-up error 10 m)
图6为初始侧偏10 m时,基于常规舵面控制的飞行员修正。图6显示,当采用“常规舵面控制+横向轨迹增量控制”时,飞行员也可以较好地完成纠偏任务,但有两个缺点:1) 指令跟踪速度比图5中慢;2) 需要牺牲机身水平,以较大的滚转角实现纠偏。
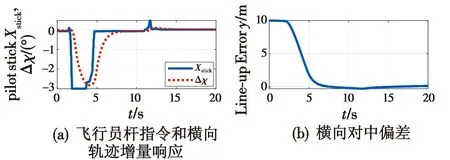

图6 基于常规舵面控制的飞行员修正(初始侧偏10 m)Fig.6 Pilot correction based on conventional control surface (initial line-up error 10 m)
4.2 条件2:初始侧偏10 m+甲板运动跟踪
图7为初始侧偏10 m+甲板运动跟踪时,基于综合直接侧力控制的飞行员修正。图8为初始侧偏10 m+甲板运动跟踪时,基于常规舵面控制的飞行员修正。考虑甲板运动干扰,如式(9)~(10),并在触舰前14 s让飞机跟踪甲板运动。比较图7和图8可知,当采用“综合直接侧力控制+横向轨迹增量控制”时,飞行员能让飞机更敏捷地跟踪侧向甲板运动,同时滚转角基本不变。
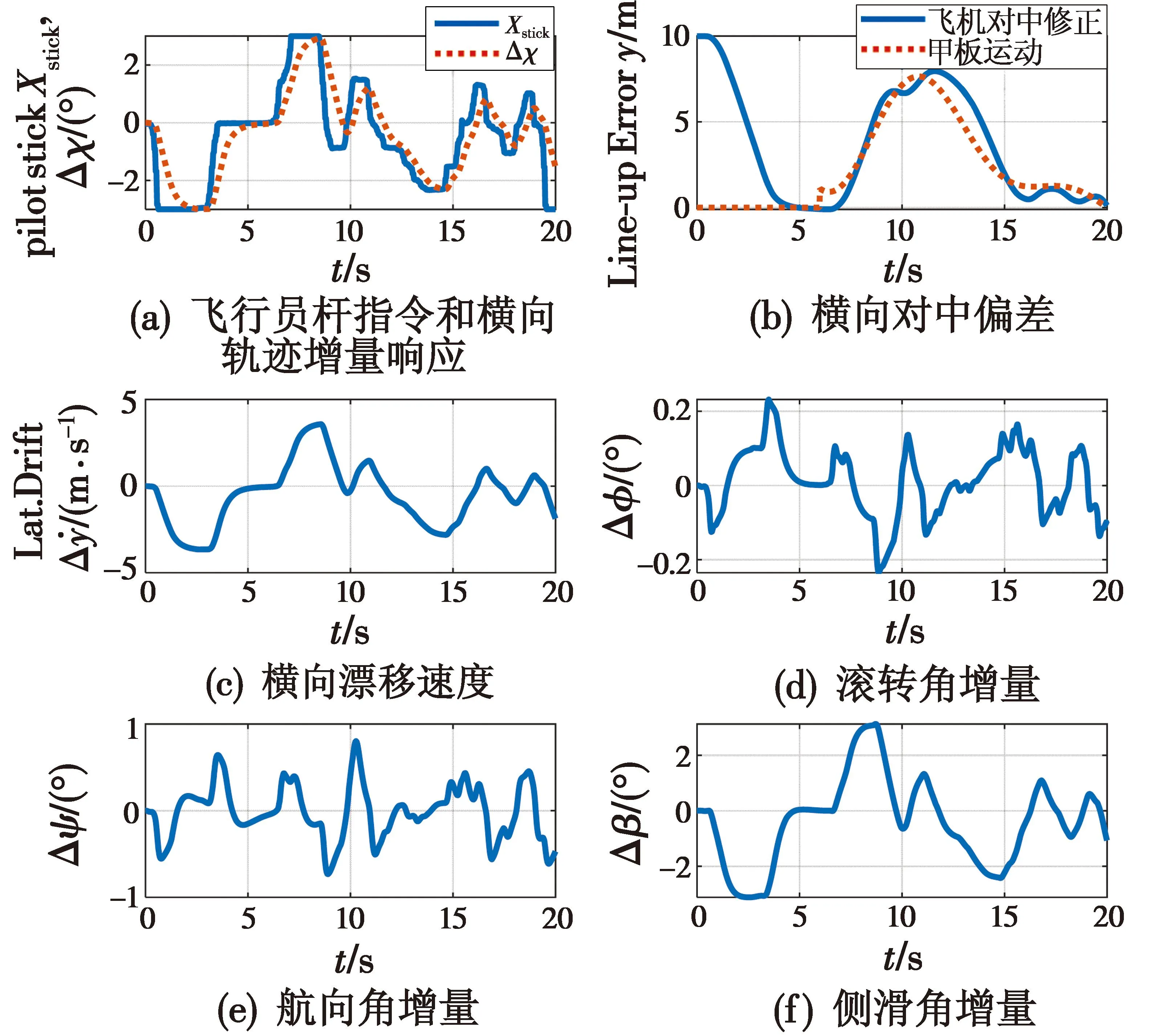
图7 基于综合直接侧力控制的飞行员修正(初始侧偏10 m+甲板运动跟踪)Fig.7 Pilot correction based on integrated direct side force control (initial line-up error 10 m and deck motion tracking)
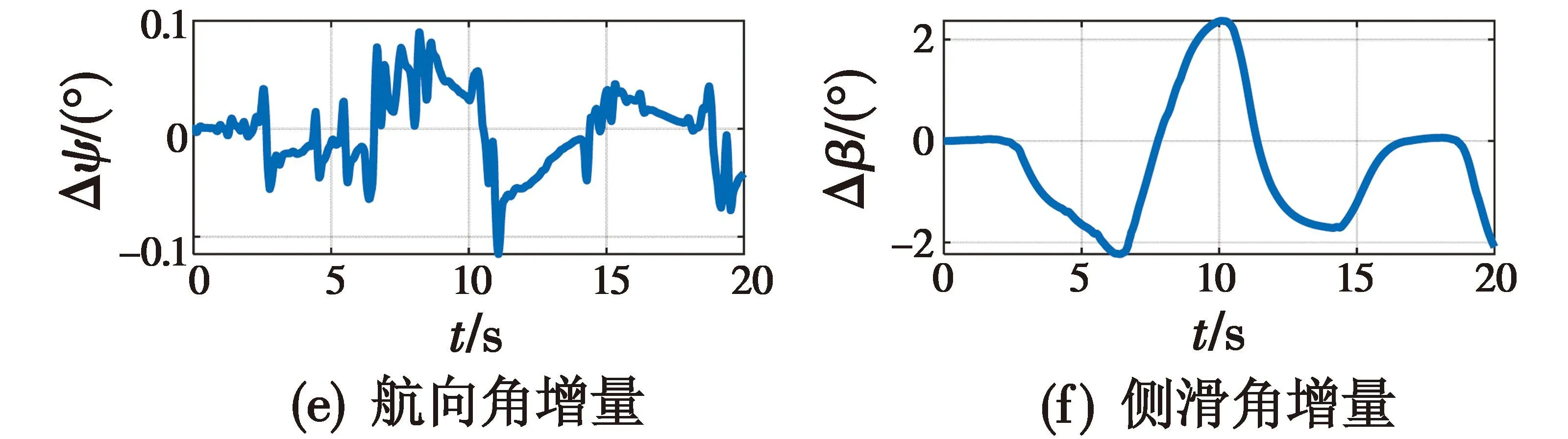
图8 基于常规舵面控制的飞行员修正(初始侧偏10 m+甲板运动跟踪)Fig.8 Pilot correction based on conventional control surface (initial line-up error 10 m and deck motion tracking)
4.3 条件3:初始侧偏10 m+侧风1 m/s
图9为初始侧偏10 m+侧风1 m/s时,基于综合直接侧力控制的飞行员修正。图10为初始偏差10 m+侧风1 m/s时,基于常规舵面控制的飞行员修正。在着舰过程中加入侧风干扰,比较图9和图10可知,当采用“综合直接侧力控制+横向轨迹增量控制”时,整个过程滚转角和航向角基本不变。但采用“常规舵面控制+横向轨迹增量控制”时,滚转角变化幅度很大,且最后需要稳态时保持一个滚转角静差来抵抗侧风。
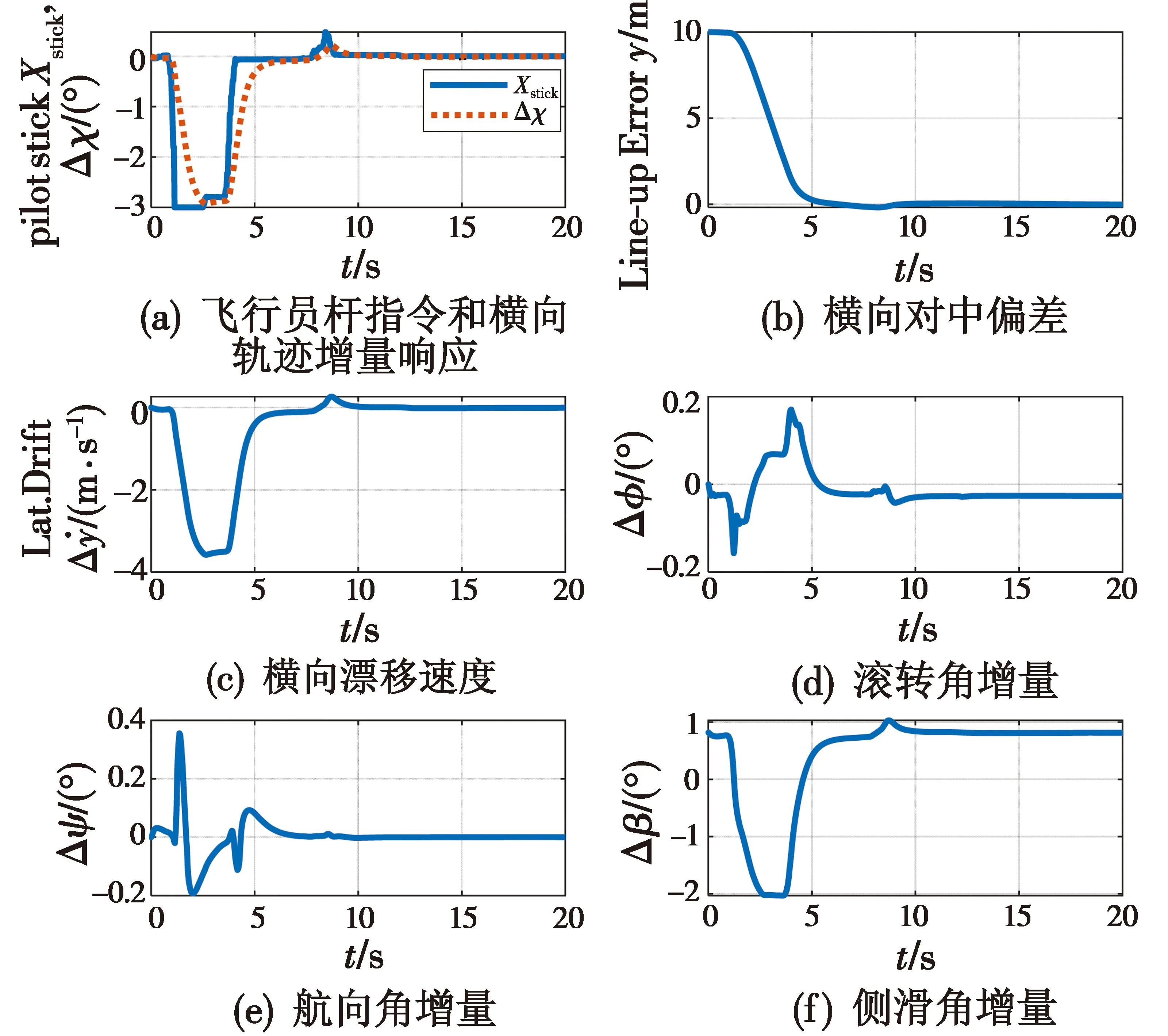
图9 基于综合直接侧力控制的飞行员修正(初始侧偏10 m+侧风1 m/s)Fig.9 Pilot correction based on integrated direct side force control (initial line-up error 10 m and lateral wind 1 m/s)
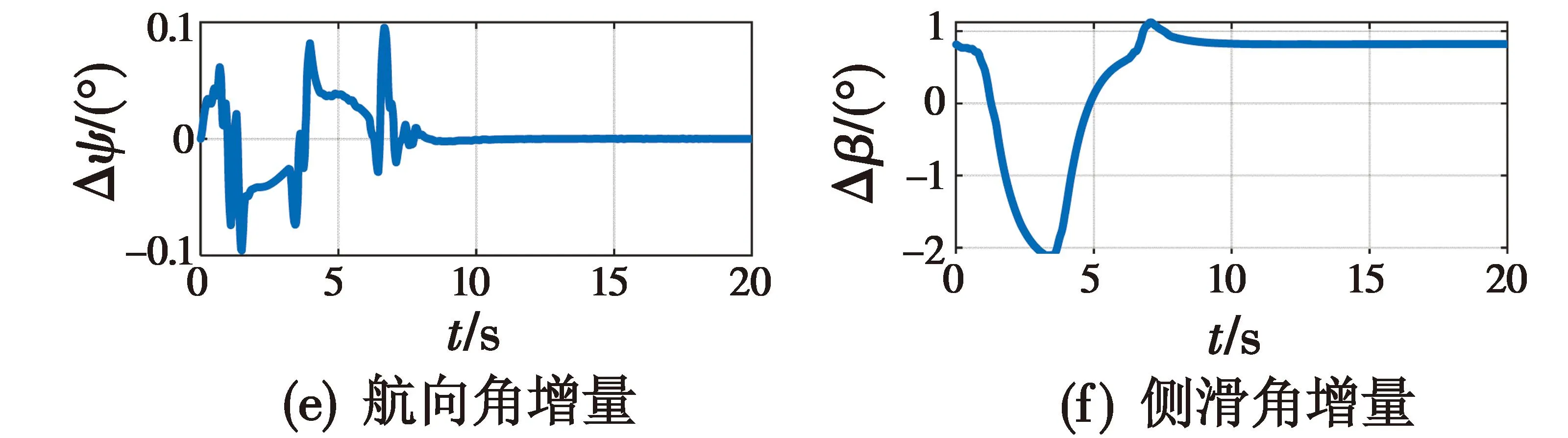
图10 基于常规舵面控制的飞行员修正(初始侧偏10 m+侧风1 m/s)Fig.10 Pilot correction based on conventional control surface (initial line-up error 10 m and lateral wind 1 m/s)
4.4 仿真结果
综合上述3个条件下的着舰仿真,“综合直接侧力控制+横向轨迹增量控制”的着舰优势为:响应迅速,能快速地纠偏、灵敏地跟踪甲板运动、快速地抵消侧风干扰;整个过程中,航向角和滚转角基本不变,力矩控制与力控制解耦;在风干扰下,滚转角无静差;横向轨迹增量控制和HUD的共同作用可以让飞行员很直观地操纵飞机着舰。
5 结束语
本文提出了一种新的着舰控制方法,即综合直接侧力控制着舰。首次将直接侧力应用到着舰研究上,将美军MAGIC CARPET着舰控制的纵向控制理念拓展到侧向控制上,对直接侧力舵面和常规舵面进行综合控制,实现侧向三通道解耦,并设计横向轨迹增量控制,改进了HUD显示符号,通过实时仿真进行了验证。本文控制方法的优点如下。
1) 大大减轻了飞行员横向操纵负担。飞行员只需要操纵一个横向装置,即横向杆(无需协调脚蹬、油门、纵向杆、横向杆等);且修正侧向对中偏差时,只需“一杆操纵”策略,即可完成修正。
2) 飞行员可更加直观地操控和修正。飞行员不再直接控制滚转角,而是直接控制横向轨迹角增量。这让横向杆位移量能直接正比于横向漂移速率,而且结合改进的HUD符号显示,飞行员可以很直观地修正。
3) 实现了侧向修正和姿态控制的解耦。飞行员在侧向纠偏、跟踪甲板运动、抗侧风时,可以不用考虑航向角、滚转角、侧滑等问题(滚转角和航向角基本不变)。避免了传统侧航法和侧滑法的缺点,有利于简便和安全地侧向着舰。
4) 横向修正的响应更加迅速和精确,有利于横向的安全精确着舰。
